1. Introduction
Serviceability assessment of footbridges under human-induced excitation has become a challenging engineering problem since the London Millennium Bridge was closed in 2000 due to unexpected lateral vibrations induced by synchronized pedestrians [
1]. That episode highlighted a gap in the knowledge and related code provisions concerning pedestrian dynamic loads and their dynamic effect on flexible structures. Since then, a great number of studies have been devoted to fill the gap, and significant advancements have been made both in the phenomenological analysis and in the modelling of dynamic loads induced by walking pedestrians (for a review see, e.g., [
2,
3,
4]). Despite this, there is still lack of an unanimously accepted procedure to assess the dynamic behavior of footbridges under pedestrian excitation.
In this context, the current knowledge could be greatly extended by making available experimental data collected on real footbridges, which so far are very scarce. Actually, despite several papers have been published on case studies of existing footbridges (e.g., [
5,
6,
7,
8]), experimental data were rarely made available to the scientific community. To the authors’ best knowledge, only three examples exist in the literature. The first one is the benchmark footbridge described by Zivanovic [
9], i.e., the Podgorica footbridge in Montenegro. Collected data concern both the dynamic response measured under operating traffic conditions and statistics of the pedestrians’ speed and frequency, as well as the footbridge mode shape. The second dataset is the one collected by Gomez et al. [
10] on a 12 m-long laboratory footbridge, specifically built as a testbed to study human–structure interaction. The footbridge dynamic response was recorded during one people crossing: 100 people crossed the footbridge 20 times each at frequencies controlled through a metronome. Pedestrian crossings were recorded through a videocamera in order to correlate the pedestrian kinematics to the footbridge dynamic response. The third dataset was collected by Van den Broeck et al. [
11] on the Eeklo footbridge. It consists of four data blocks involving two pedestrian densities, 0.25 ped/m
and 0.50 ped/m
, representing a total of more than one hour of data for each pedestrian density: footbridge response and pedestrian trajectories were simultaneously recorded. All these examples are characterized by quite simple footbridge structures and by unrestricted pedestrian traffic, i.e., with very low pedestrian densities. Moreover, detailed data on footbridge structures, useful for building Finite Element Models, are not always available.
The aim of this paper is to make available to the scientific community a new benchmark structure, the Streicker footbridge, which is in service at the Princeton University Campus. The Streicker footbridge overpasses a busy roadway, but is used also for research and educational purposes related to Structural Health Monitoring (SHM) (e.g., [
12,
13,
14,
15]). With respect to the previously cited benchmarks, the Streicker bridge is characterized by a complex geometry. In plan view, two coupled arches form an X-shape, developing a considerable deck stiffness in the lateral direction. In the vertical plane, a series of metallic supports, i.e., a central arch and a series of lateral piers under the approach legs, bear vertical loads. The dynamic properties of the Streicker footbridge make it particularly responsive to excitation frequencies typical of pedestrians’ running conditions. Hence, the Streicker footbridge is particularly suitable as a benchmark structure to investigate the dynamic effects of running pedestrians. Actually, despite a great number of studies that were devoted in the last two decades to characterize and model the walking excitation (for a review, see, e.g., [
16]), the running excitation has been far less studied [
17,
18,
19].
Furthermore, the Streicker footbridge embeds a complex monitoring system with a number of sensors that have already been used in several research studies. The aim of transforming the Streicker bridge into an on-site laboratory for various research and educational purposes is presented in [
12]. The real-time detection and characterization of early-age thermal cracks in the concrete deck is presented in [
13], along with details on the discrete and distributed fiber optic sensors arrangement. A universal method for the determination of the distribution of prestressing forces along the concrete deck of the Streicker Bridge is developed in [
14,
15] using the embedded long-gauge fiber optic sensors. The Streicker Bridge was also used in [
20] to test a newly designed stand-alone sensor equipped with an MEMS-based accelerometer and a wireless transmission unit for vibration monitoring. Recent developments [
21,
22] presented the modal frequencies identification of the Streicker Bridge by output-only approaches. Furthermore, these last studies proposed to develop a wireless network monitoring system to be applied in parallel to the embedded fiber optic system for a comprehensive assessment of the stiffer component (the main span) of the bridge, where only minor strains are registered by the fiber optic sensors.
Although a significant amount of expertise was accumulated in the described research literature, little knowledge was gained on the effects of the pedestrian loads on the Streicker Bridge. In particular, the structure can be subjected to amplification in the typical frequencies of pedestrian running over the main span and the south-east approaching leg. Furthermore, the effects of running individuals may amplify the bridge response with respect to local modes, owing to the peculiar characteristics of the structure. In this perspective, different vibration control solutions, such as TMDs or linear dampers, can be designed and evaluated according to different schemes, e.g., hybrid solutions, decentralized and semi-active [
23,
24,
25,
26,
27,
28].
This paper presents a new phase of the research on the Streicker Bridge benchmark. The general aim is the derivation of refined FE models of the structure with different levels of accuracy for serviceability assessment under pedestrian loading, structural control and SHM purposes. The presented FE models, developed in ANSYS APDL [
29], are validated against available static and dynamic experimental data collected by the embedded monitoring system on the footbridge, namely static displacements, moment influence lines and modal responses. The paper is completed by an example of pedestrian jumping load applied to the more refined FE model. The source files of the developed FE models will be made available to researchers who are interested in carrying out studies on the above-mentioned topics. In particular, possible applications of the developed FE models are the investigation of pedestrian interaction with the system dynamics, the proposal and testing of new models of running excitation, the design of vibration response mitigation measures, damage detection or model updating.
The paper develops as follows:
Section 2 focuses on the presentation of the Streicker Footbridge, while the subsequent
Section 3 and
Section 4 are devoted to the presentation of the FE model development and their validation.
Section 5 presents the pedestrian loading application, while concluding remarks are outlined in
Section 6.
3. Finite Element Models
Two different FE models were built in ANSYS Mechanical APDL. The models are characterized by different levels of accuracy in describing the peculiar deck geometry, with a main span “splitting” in two legs at each side, which raises the problem of modelling the zones of transition between the central span and the legs. The first model, Beam (B model), contains only beam elements: the transition zone is approximately taken into account by creating a rigid region that connects the eccentric axis lines of central span and legs. In the second model, Shell (S model), the deck geometry in the plan is modelled with shell elements.
The two models, able to correctly describe the footbridge global structural behavior at different refinement levels, could be used for different purposes. For example, the S model, with its accurate description of the deck geometry in plan, allows us to perform numerical simulations of pedestrian traffic along any trajectory. Conversely, the B model provides a slender analysis tool when detailed spatial behavior of deck is not the focus of the analysis. In the following section, the two models share a set of assumptions and input data.
3.1. Modelling Assumptions
Both long-term effects on the concrete and the effect of the deck post-tensioning on the modal results were neglected, under the assumption of linear behavior of materials and perfect bond with tendons, since the variations in the deformed equilibrium configuration do not significantly modify the dynamic properties of the structure [
35].
The real variable cross-sections of the deck, made complex by the interior holes (see
Figure 2), were simplified through the definition of five equivalent rectangular sections, whose tensor of moments of inertia were provided as input in Ansys. The dimensions
b and
h of the equivalent cross sections are chosen to match the moments of inertia of the real cross section (
,
). The effective area (
) of the equivalent sections is larger than the real one (
), due to the presence of the holes.
Table 3 shows the dimensions of the equivalent sections, referring to the pier names (from pier P3 to pier P10) shown in the elevation view (
Figure 1).
The elements of the arch, spandrels and piers are assigned tubular steel cross sections.
Table 4 summarizes the dimensions of the assigned cross sections, where
and
are the internal and external radius, respectively.
Due to the difference in the effective area of the deck cross-sections, a reduction in the density of the concrete was applied in order to preserve the total mass.
Table 5 reports the implemented concrete properties. Note that the value of
also accounts for the additional contribution due to the railings, the utilities and the wearing surface. Similarly, the density of structural steel was modified to account for the concrete infilling (
Table 6).
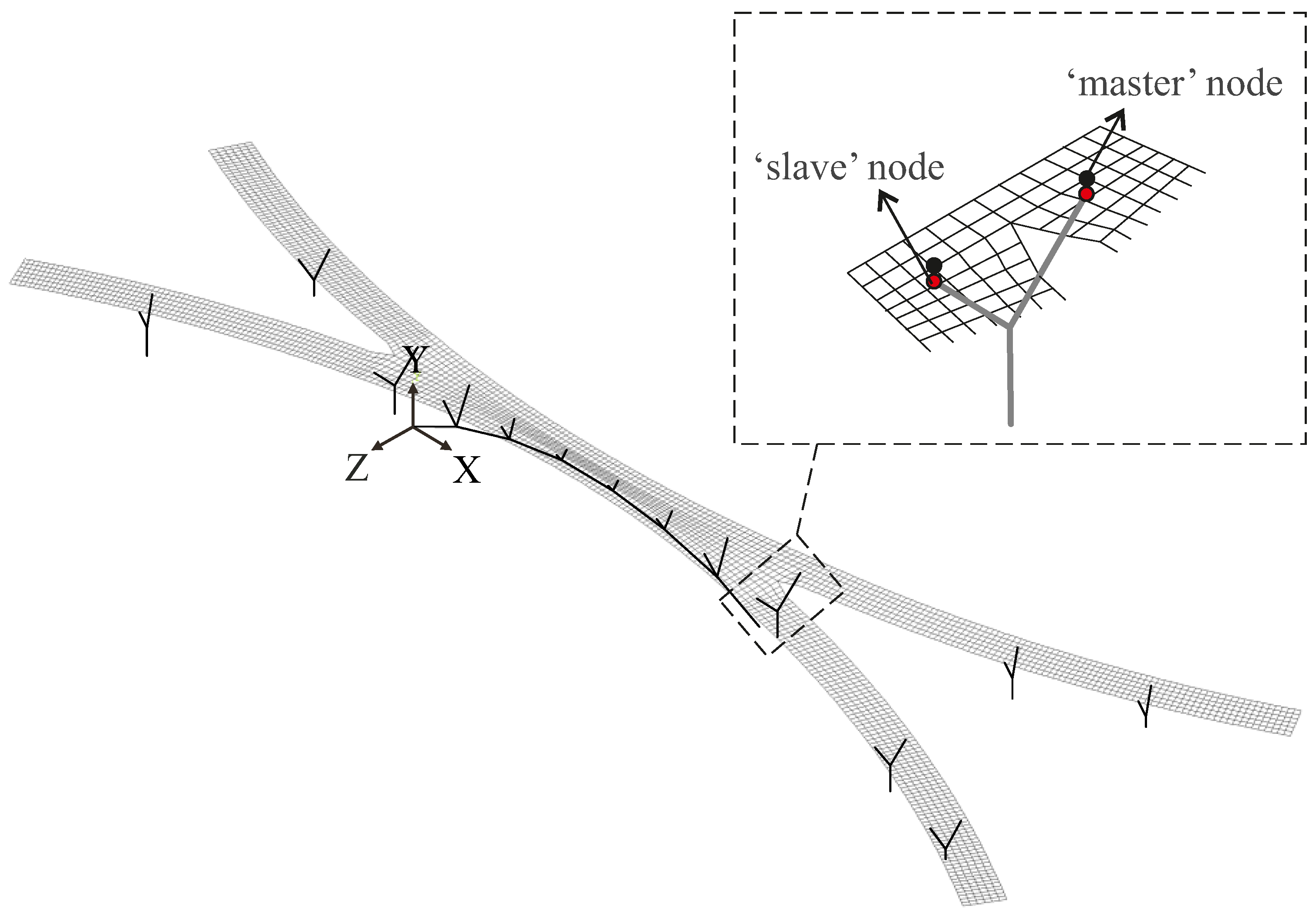
In both models, the deck and the pier nodes at every pier/spandrel location are connected using rigid body constraints between the centroid of the deck and the two upper nodes of every Y-shaped pier or spandrel (three nodes in total). Thus, all degrees of freedom (six DOFs) are constrained, in accordance with the bolted connection between deck and pipes.
3.2. B Model
The B model was first developed in [
36] and contains 98 nodes and 84 Timoshenko beam elements (
Figure 5), named BEAM188, with six DOFs per node. This beam element can be used for both slender and stout beams. The deck elements were assigned the five equivalent rectangular cross-sections described in
Table 3, depending on their position. Beam nodes do not have offset with respect to the mesh nodes that are located in the middle plane of the deck. In a similar way, the arch, piers and spandrels were modelled with four different pipe cross-sections based on their real dimensions (
Table 4).
As can be noticed in
Figure 5, the deck and pier nodes are not connected by beam elements, but by rigid links that constrain the six degrees of freedom of a removed (“slave”) node to the ones of a retained (“master”) node. For the case at study, the retained node is the deck node at the pier or spandrel locations and the removed nodes are the two upper nodes of every Y-shaped pier and spandrel. The six degrees of freedom of the removed nodes are all constrained in this way, and no independent equilibrium equation is written for them. The bases of the piers and of the arch are fixed, while the boundary conditions at the four abutments are 3D hinges. The model was preliminary validated by comparing the results of the vertical reactions due to self-weight (6902.50 kN) to the weight value computed manually (6904.72 kN).
3.3. S Model
A first version of the S model was developed in [
36]. The improved S model, depicted in
Figure 6, contains 3425 nodes. Furthermore, in this model, the BEAM188 element was used for the arch, piers and spandrels. The deck is discretized with SHELL181 elements, a four-node element with six DOFs at each node. This shell element is suitable for analyzing thin to moderately thick shell structures. In total, the S model contains 2995 elements: 43 beam elements to model the arch, piers and spandrels and 2952 shell elements to model the deck.
The shell elements adopted for the deck are quadrilateral, with an average size of approximately 0.5 × 0.5 m. The element nodes are created by a direct user-defined generation. Since the shell elements allow constructing a tapered deck, the variation of the cross-section in the main span of this model is smoother than in the B model. Adjacent shell elements connect to each other at the midplane of the deck, so they do not have an offset.
In the same way as for the B model, the arch, piers and spandrels adopt four different pipe cross-sections based on the real dimensions of the bridge. Differently from the B model, the deck is continuous between the legs and the main span. Similarly to the B model, the two upper nodes of the pier or spandrel are constrained to their closest node of the deck shell. The boundary conditions are the same as in the B model. The self-weight validation was also positively performed in this case.
5. Dynamic Response under Jumping Pedestrian Excitation
The proposed application described in this section aims at presenting an example of simulation of dynamic response under human-induced excitation. In addition, it could be intended as a tentative validation of the dynamic behavior of the footbridge against experimental measurements of the acceleration response due to jumping pedestrians. Among the few experimental tests reported in the literature, which usually refer to pedestrians running along the south-east leg (
Section 2.5), the ones described by Sabato [
20] are considered since they are described in more detail, and time histories of the vertical acceleration are provided. In particular, in the test analyzed here, eight pedestrians jump at 3 Hz at about one-quarter of the way along the south-east leg for 30 s.
A limited number of pedestrian load models are available in the literature (e.g., [
37,
38]). The pedestrian jumping load model proposed in ISO 10137 [
39] has been adopted for the following application. The load exerted by one jumping pedestrian is modelled as a perfectly periodic half-sine function:
where
is the dynamic load factor of the first harmonic of the load,
G is the pedestrian weight, assumed equal to 700 N as usually is usually performed in the literature (e.g., [
9]),
f is the excitation frequency,
is the period and
is the contact time, assumed equal to
. In order to account for the fact that it is very difficult for people to jump in phase with each other, even if they try to intentionally excite the bridge by jumping [
40], a random phase shift is assigned among the eight pedestrian loads: specifically, pedestrians are assumed to start jumping with a time shift randomly assigned between 0 and 0.33 s (where 0.33 s is the step period). Moreover, the load amplitude is further reduced by 20% to take into account a lower correlation between pedestrians [
39].
The eight forces are applied at eight nodes of the S model around the section at a quarter of the south-east leg span. A full transient analysis is performed in Ansys. Damping is modelled according to the Rayleigh formulation, with mass and stiffness coefficients equal to 0.164 and 0.000153, respectively, estimated to obtain the experimental value of damping ratio of 0.57% [
21] on the first numerical mode, and on the mode corresponding to a cumulated participation, mass in the vertical direction of around 60%. Time step is set equal to 0.02 s.
Figure 14 plots the numerical time history of the vertical acceleration at a quarter of the south-east leg in comparison with the one measured by Sabato [
20]. The numerical response is much more regular than the experimental one. Actually, the perfectly periodic force model is not able to capture the inter- and intra-subject variability [
41,
42] that characterize pedestrian excitation. Moreover, the applied force does not account for human–structure interaction and for the related damping effect induced by human bodies [
42]. Because of these two factors, the numerical structural response overestimates the experimental one by about 12.5% (if the initial peak due to transient, at around 5 s, is neglected). The comparison between Power Spectral Density (PSD) functions of the experimental and numerical response is shown in
Figure 15. In the experimental results, peaks at both the bridge frequency and at pedestrian frequency are detected. On the contrary, the numerical PSD is concentrated on one single peak at the excitation frequency.
It should be stressed that the present section is not intended to propose an extensive validation of the FEM model dynamic behavior due to the number of uncertainties about both the adopted jumping load model and the lack of information about the applied input during the experimental test (e.g., no available information about the pedestrian weight or the phase shift). On the contrary, this section is intended to propose an example of dynamic application and to check the order of magnitude of the maximum dynamic response with respect to the available dynamic tests. Therefore, a more refined model of pedestrian jumping load is out of the scope of this paper. Nevertheless, the S model provides a quite satisfactory description of the footbridge dynamic behavior, which is expected to be closer to experimental results if a more realistic jumping model is adopted.
6. Conclusions
A new phase of the Streicker Bridge benchmark is developed and presented in this paper. It extends the preliminary research efforts mainly focused on the monitoring data as collected by the embedded system to the simulation domain-developing original FE models in ANSYS APDL. They were validated against available static and dynamic experimental data. The obtained results show a better performance of the S model with respect to the B model in satisfactorily describing the footbridge static and dynamic behavior, since it allows us to catch the footbridge spatial behavior, especially at the joints between the main span and legs, and it better describes the spatial distribution of pedestrian loading. Further improvements of both models could be obtained from new experimental campaigns specifically addressed to characterizing the footbridge dynamic behavior.
The material herein developed and made available is intended to be the starting point for further research. Applications are expected, for example, in the serviceability assessment under running pedestrian excitation, in the study of the dynamic interaction between pedestrian and structure, in vibration control, in the field of SHM (e.g., identification of simulated damage) and in the structural identification field (e.g., operational modal analysis, model updating).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}