A Jumping Robot Driven by a Dielectric Elastomer Actuator



Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Design Principle
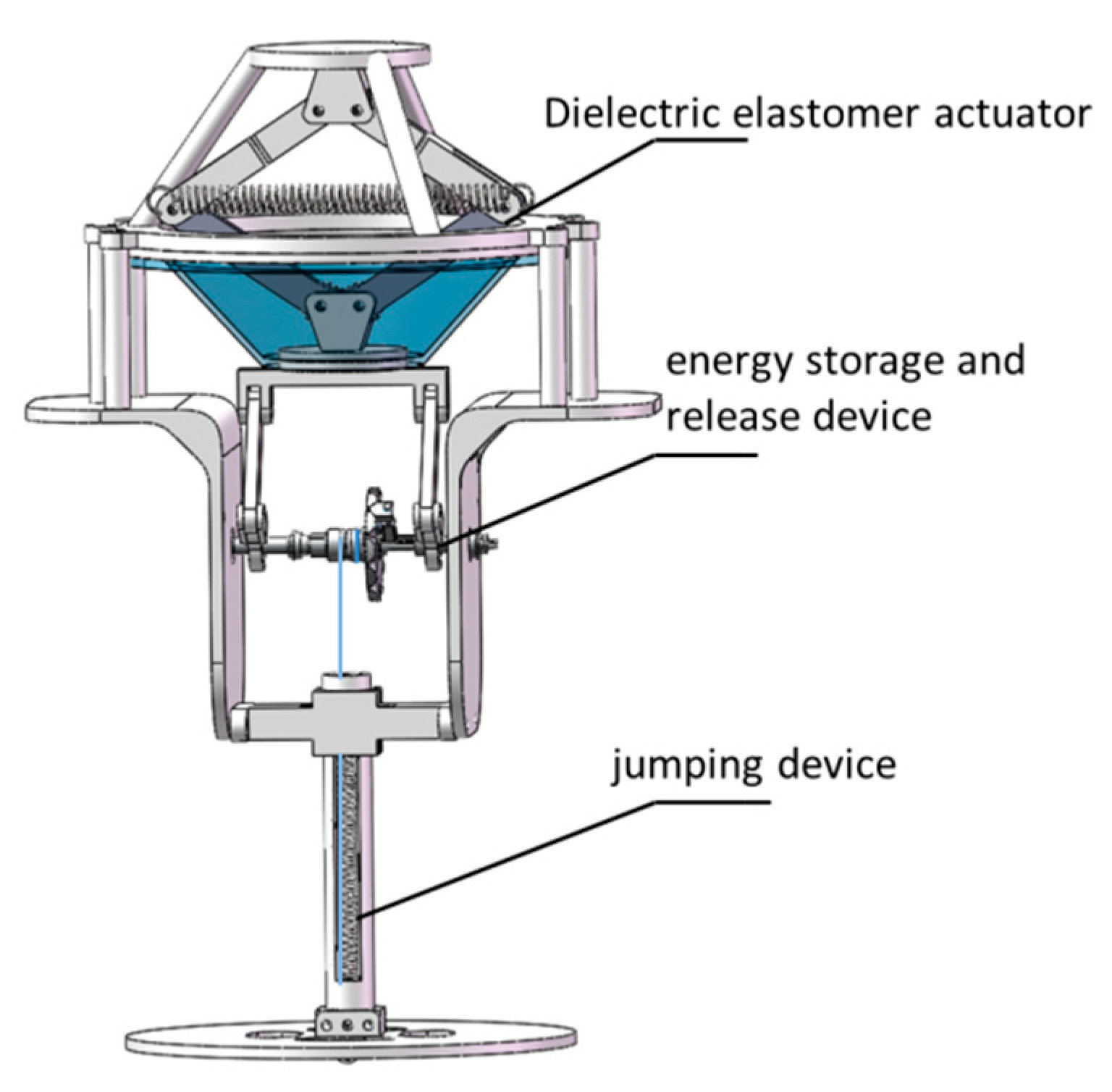
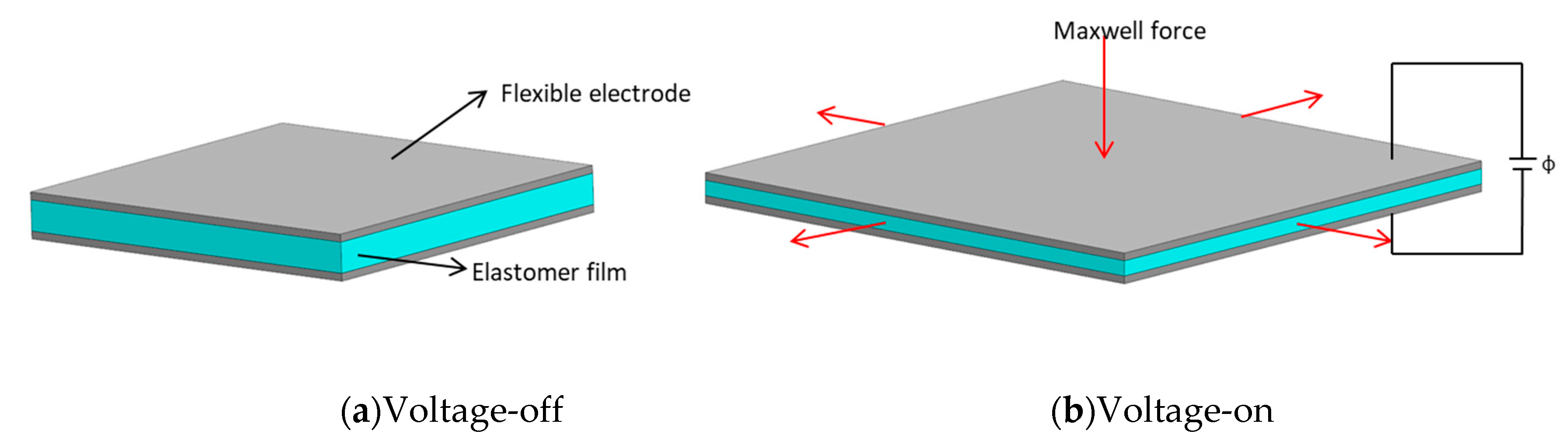
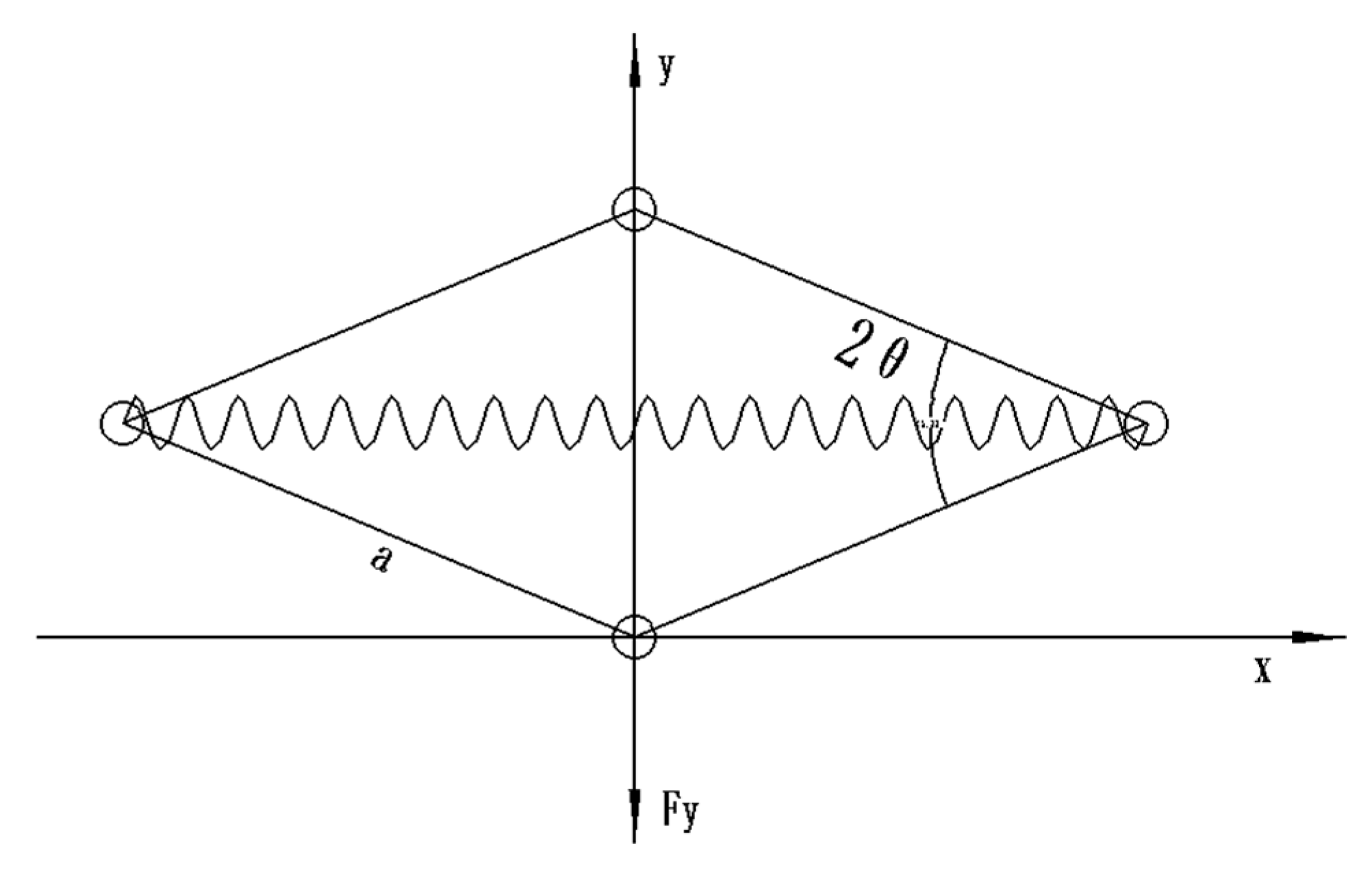
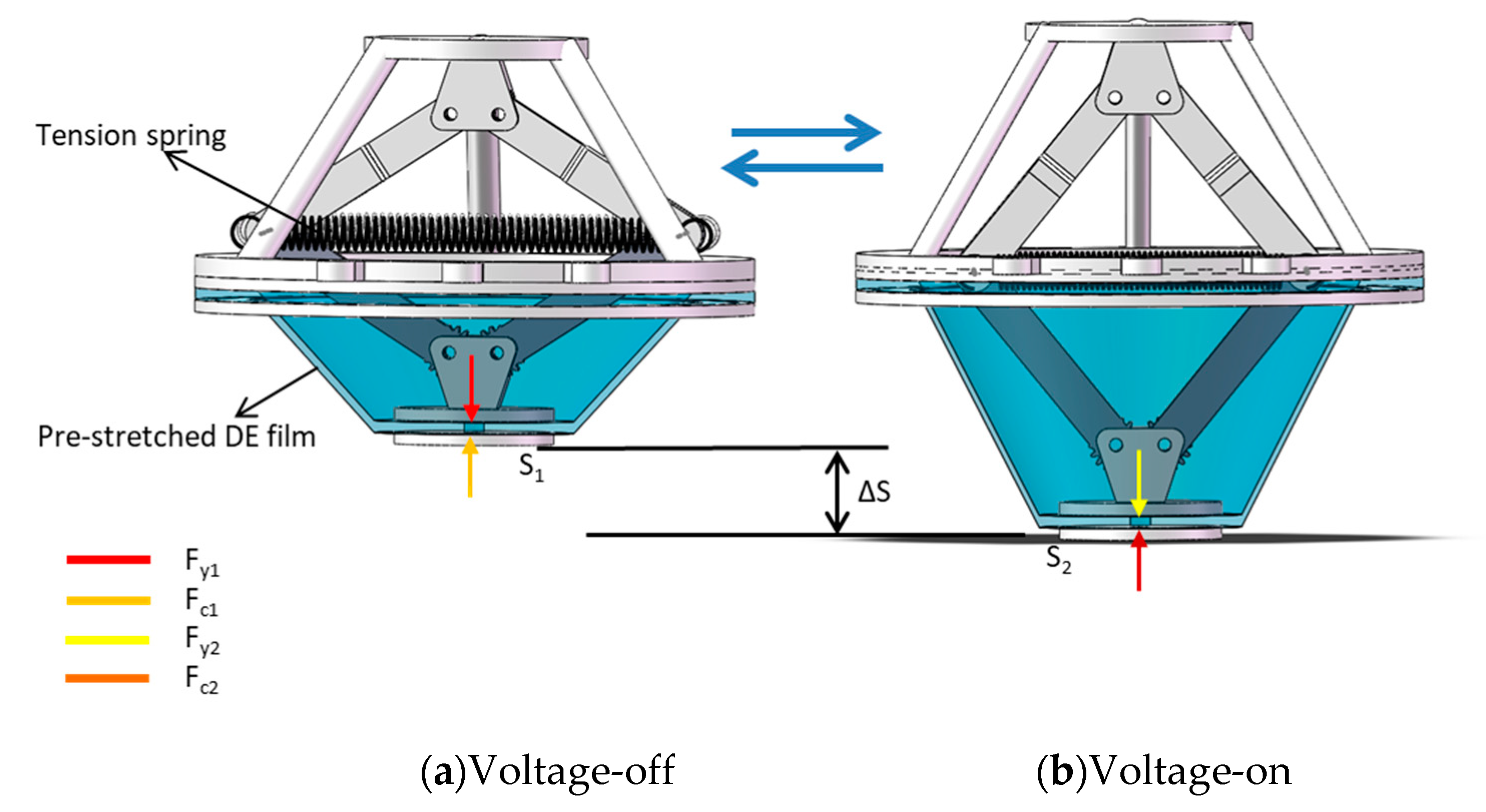
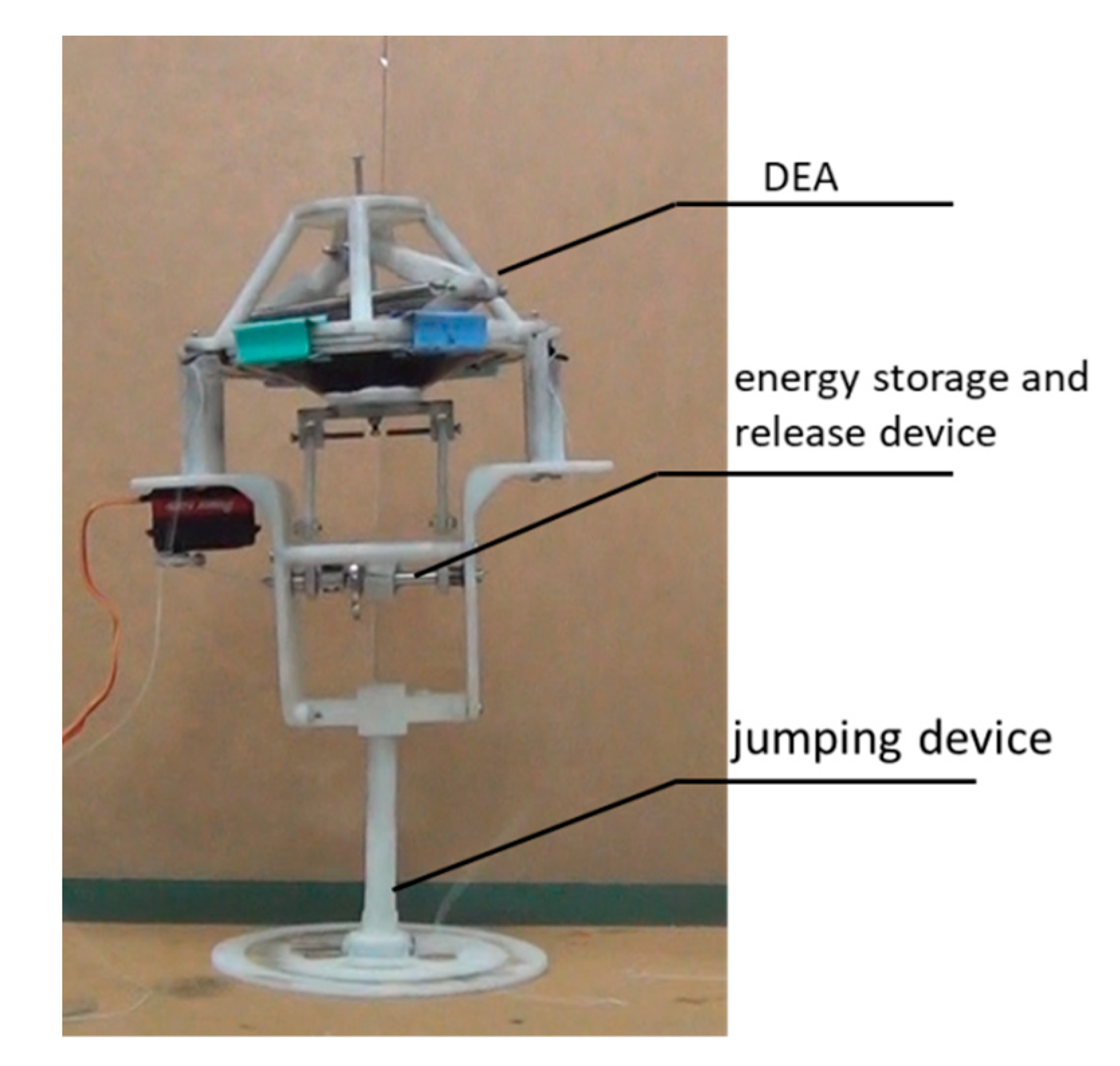
2.1. Structure Design of the DEA
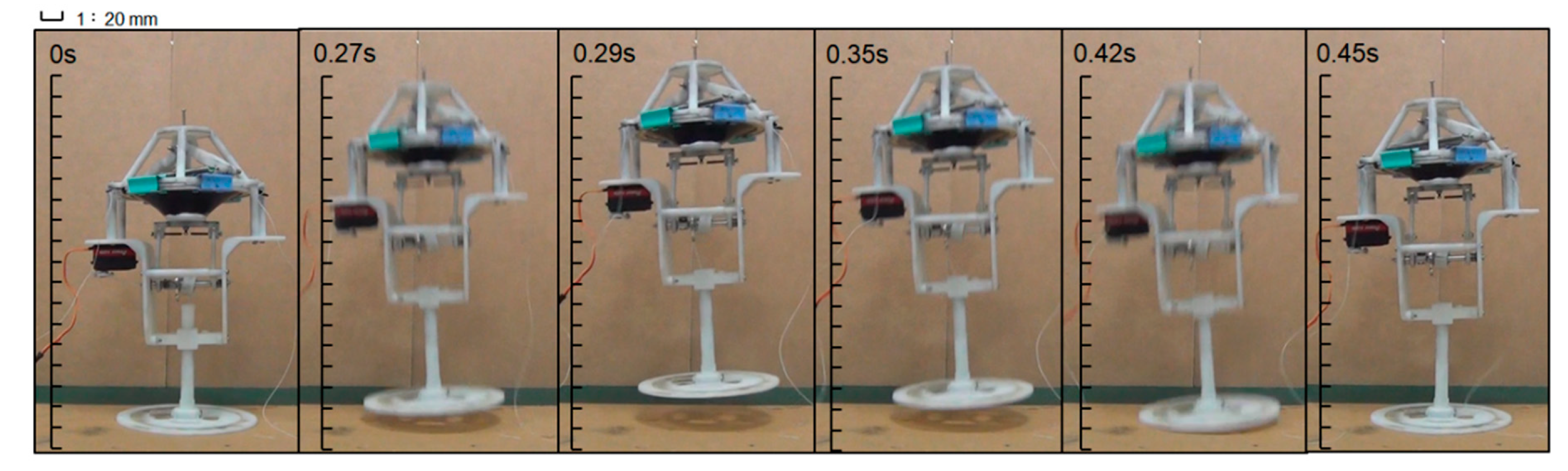
2.2. Jumping Mechanism
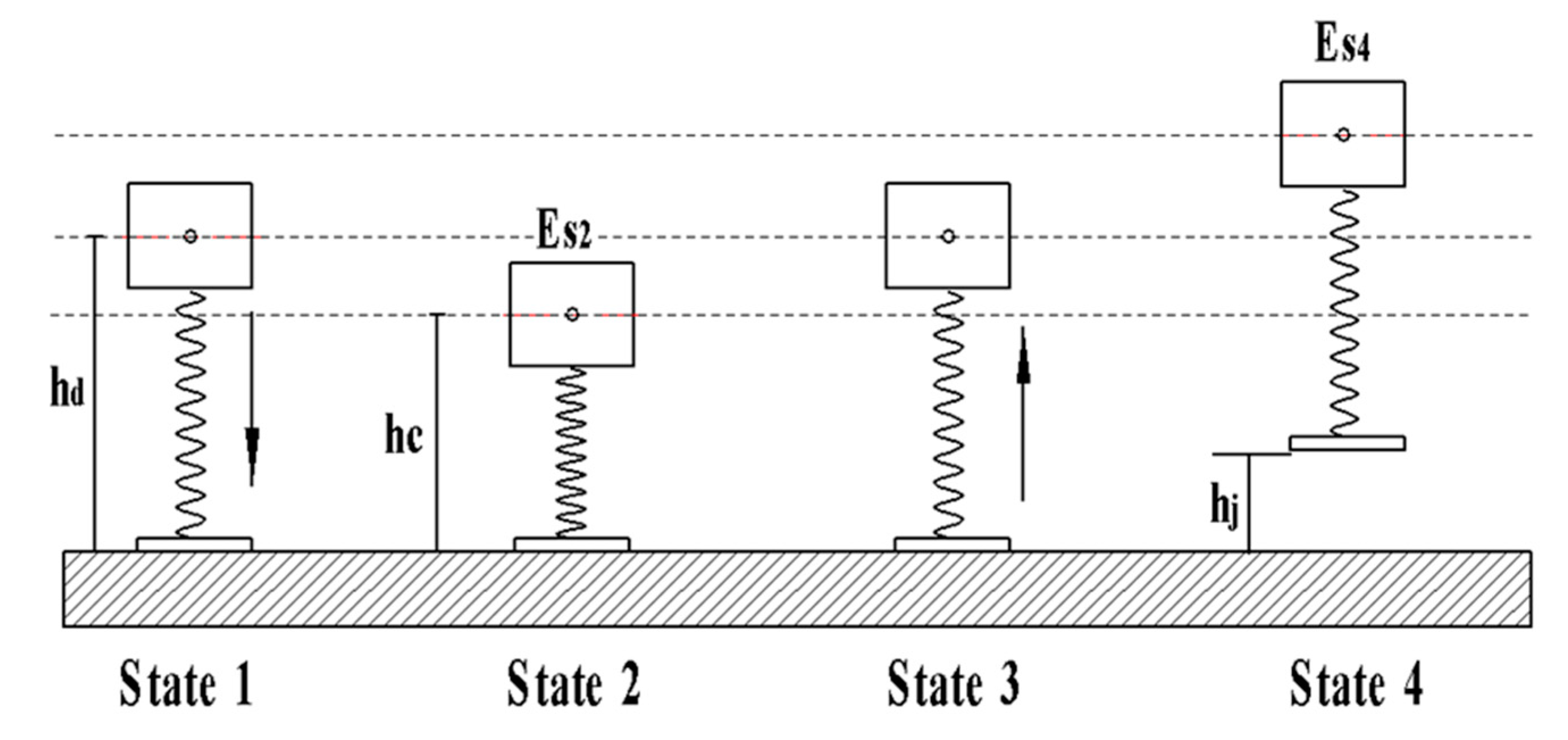
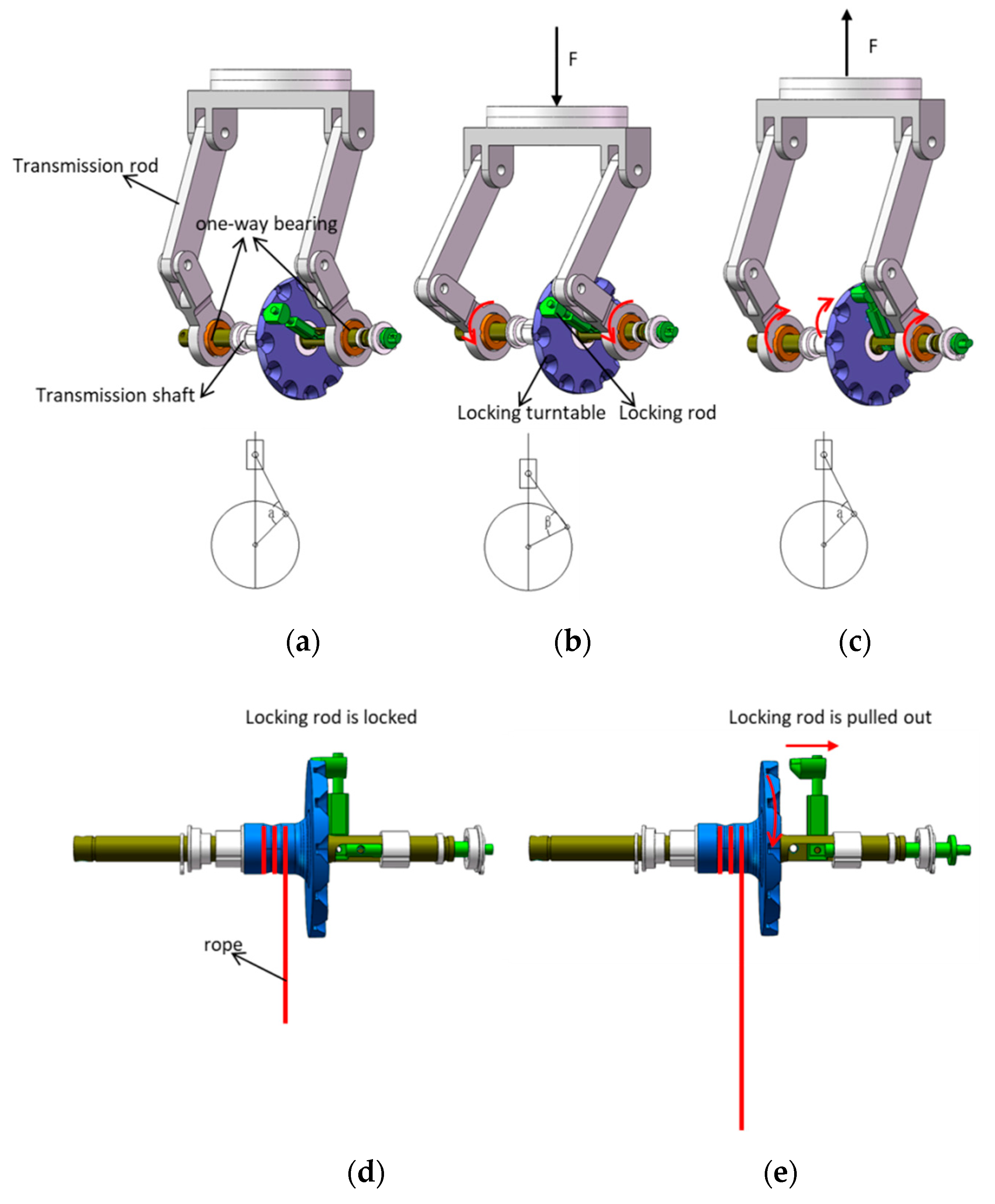
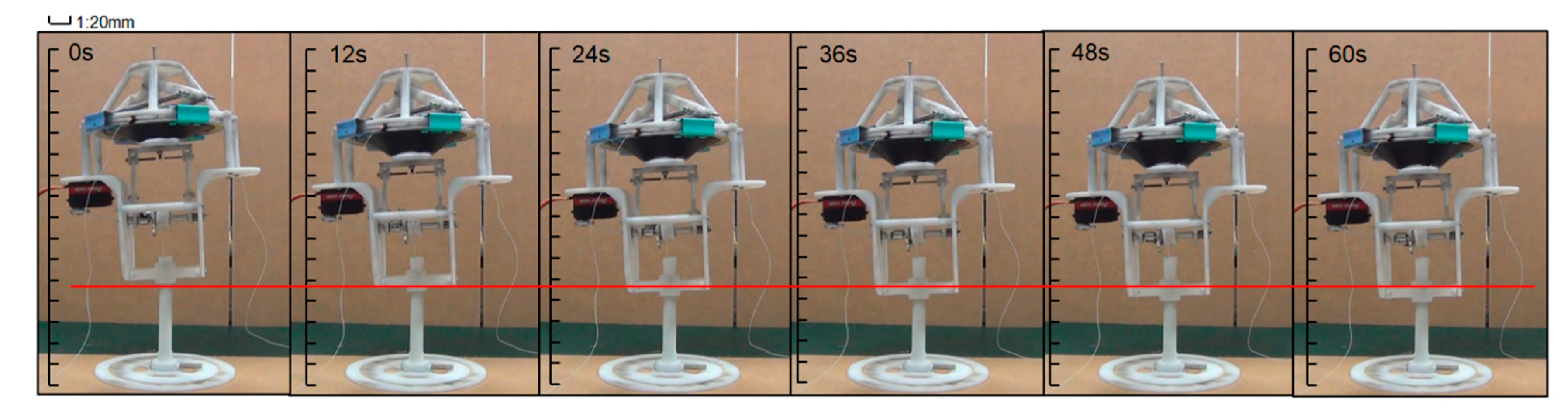
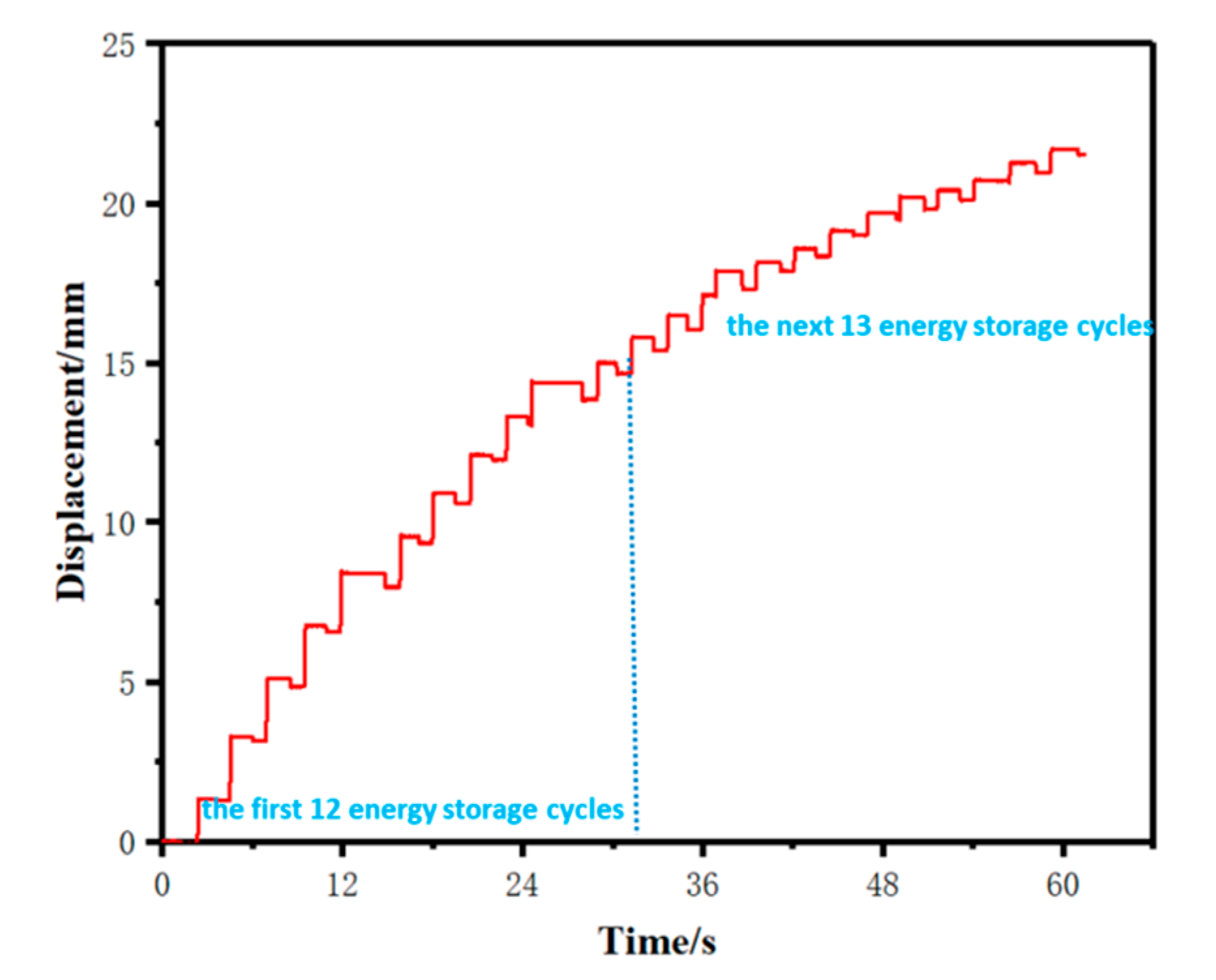
2.3. Energy Storage and Release Mechanism
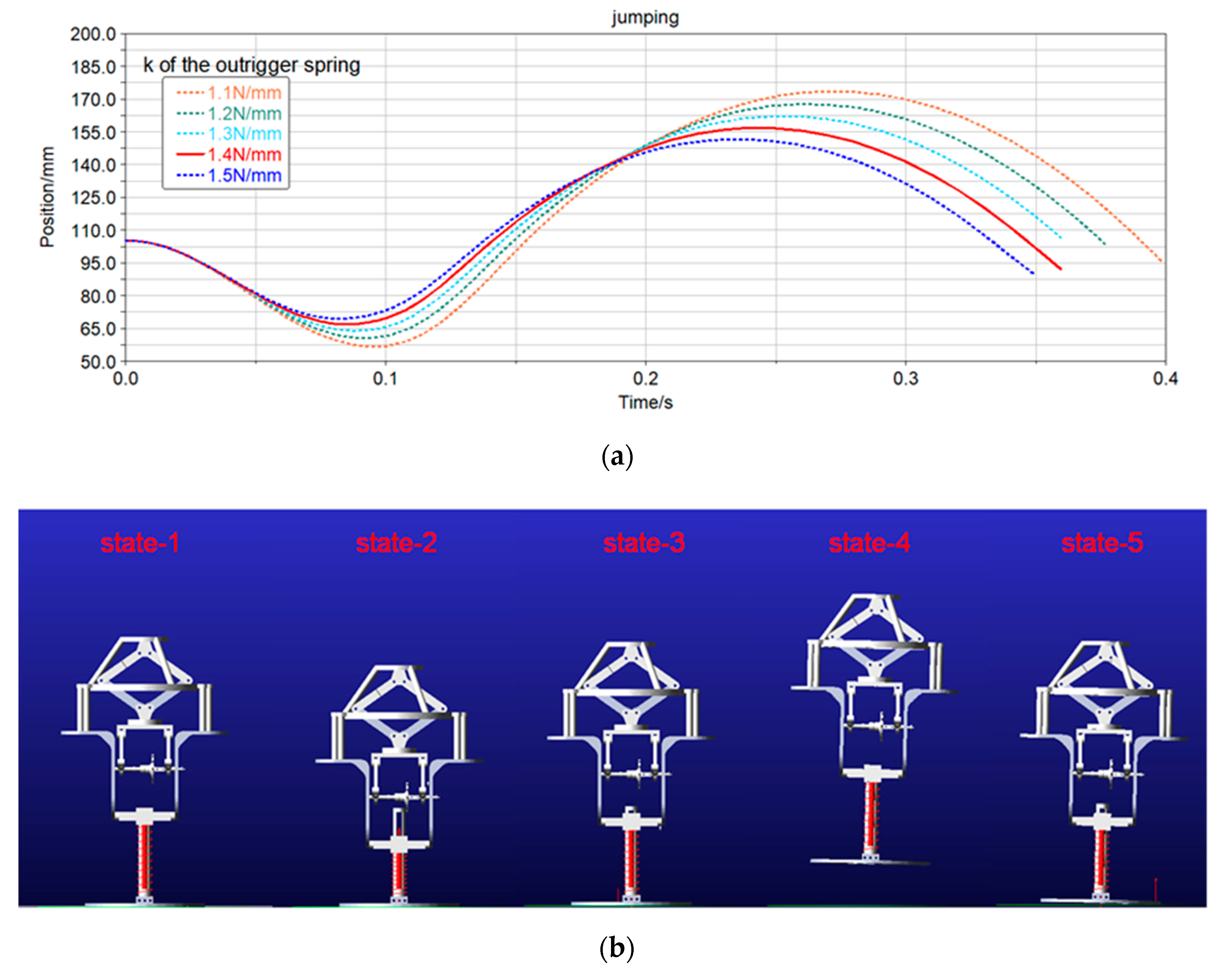
2.4. Simulation
3. Prototype Implementation and Experiment
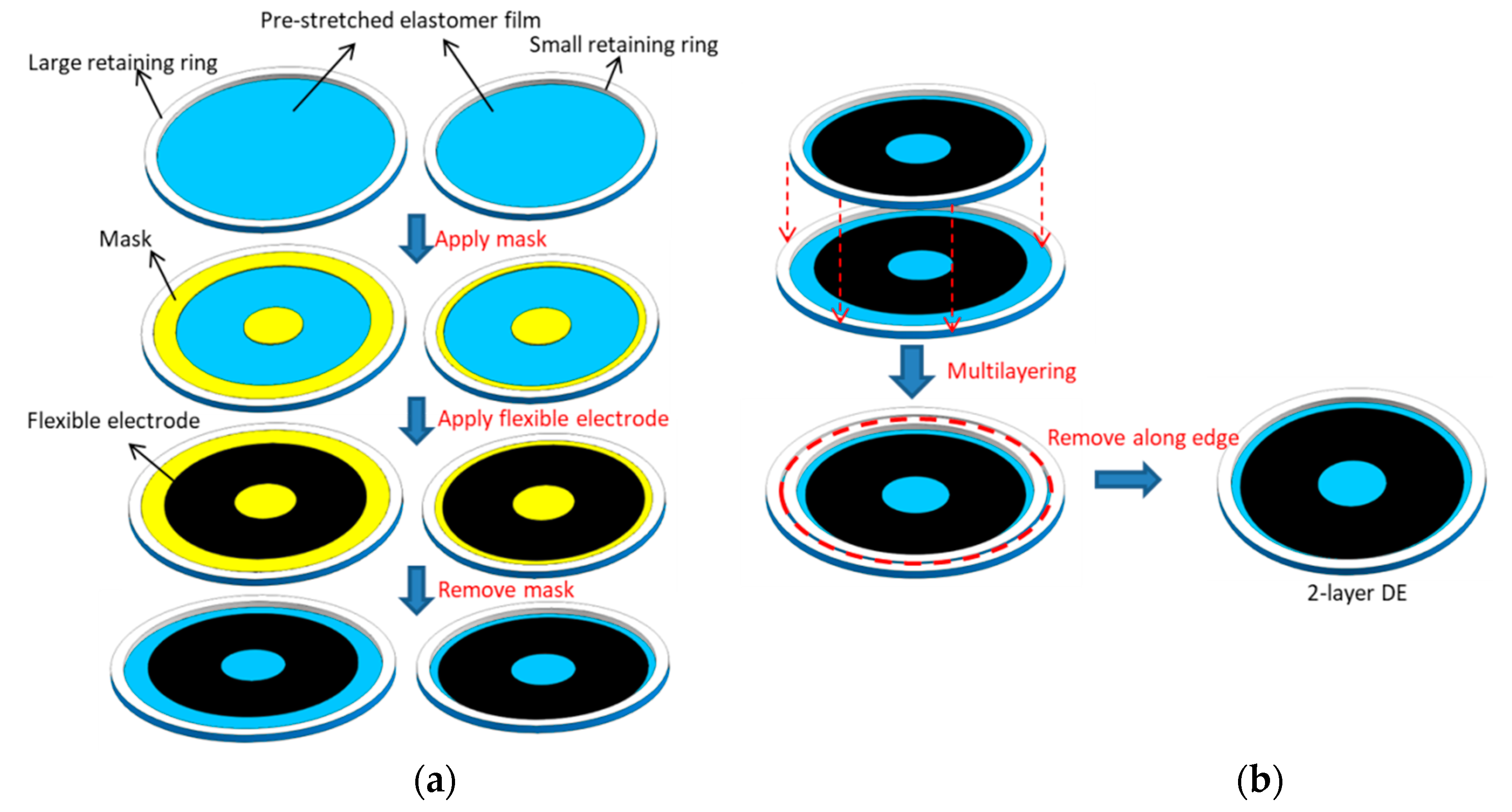
3.1. Fabrication of Multilayer DE
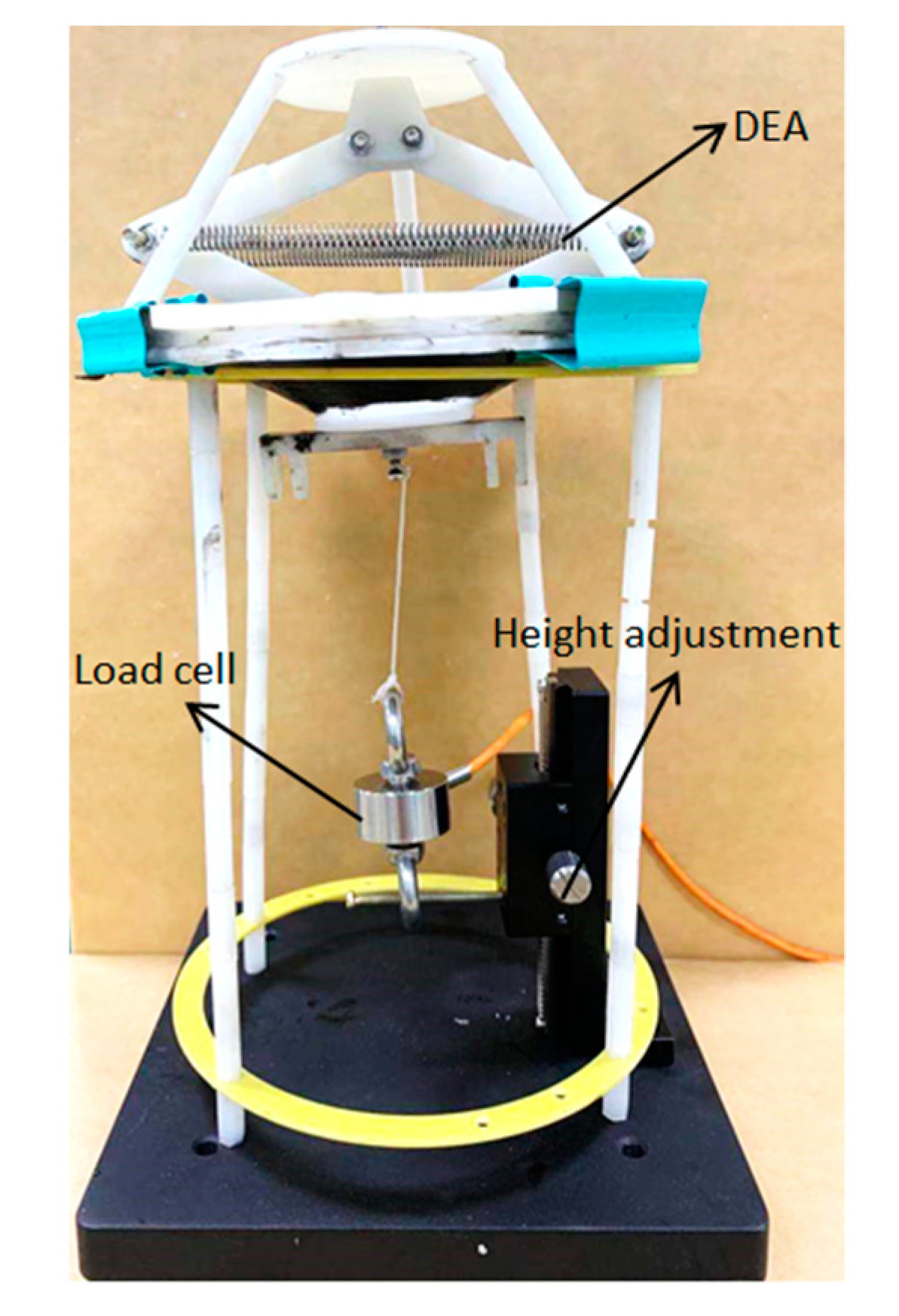
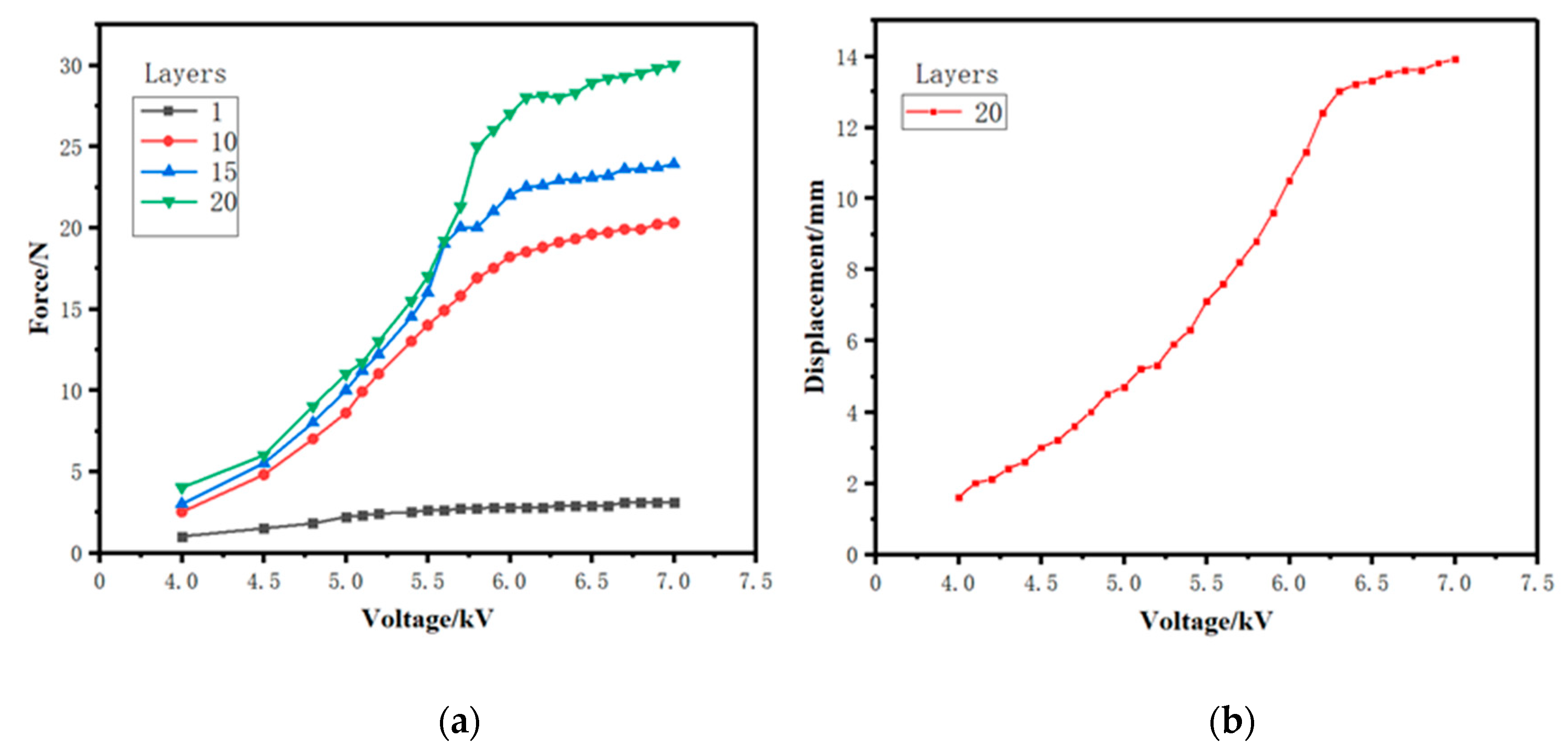
3.2. Performance of the DEA
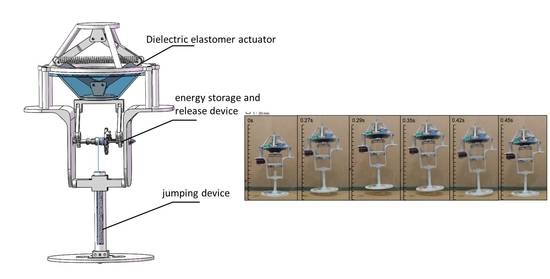
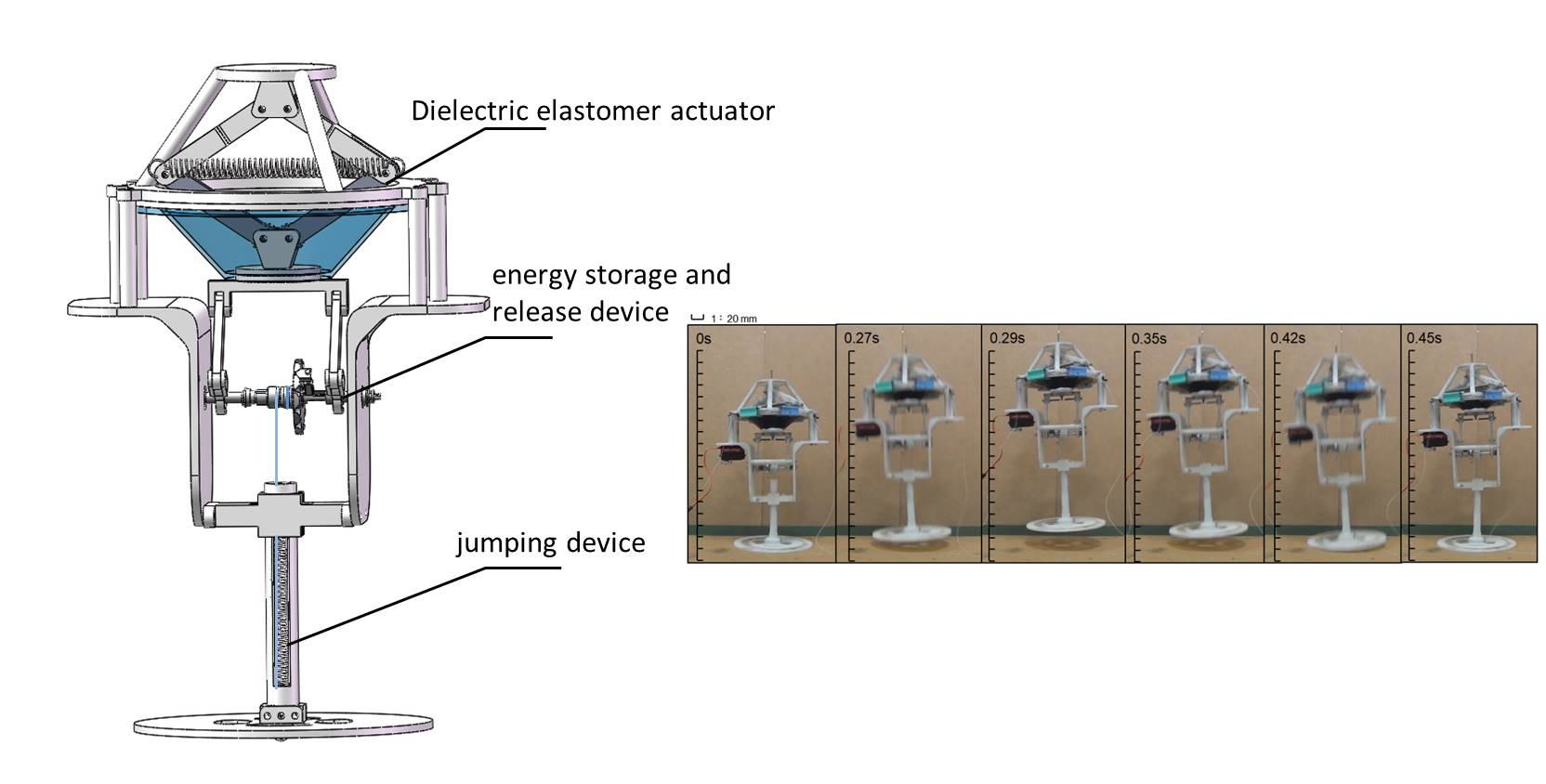
3.3. Performance of the Jumping Robot
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Li, T.; Zou, Z.; Mao, G.; Yang, X.; Liang, Y.; Li, C.; Qu, S.; Suo, Z.; Yang, W. Agile and Resilient Insect-Scale Robot. Soft Robot. 2019, 6, 133–141. [Google Scholar] [CrossRef] [PubMed]
- Johnson, E.N.; Mooney, J.G. A Comparison of Automatic Nap-of-the-earth Guidance Strategies for Helicopters. J. Field Robot. 2014, 31, 637–653. [Google Scholar] [CrossRef]
- Ohno, K.; Morimura, S.; Tadokoro, S.; Koyanagi, E.; Yoshida, T. Semi-Autonomous Control of 6-DOF Crawler Robot Having Flippers for Getting Over Unknown-Steps. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, California, USA, 29 October–2 November 2007. [Google Scholar]
- Zhang, Y.; Zhang, L.; Wang, W.; Li, Y.; Zhang, Q. Design and Implementation of a Two-Wheel and Hopping Robot With a Linkage Mechanism. IEEE Access 2018, 6, 42422–42430. [Google Scholar] [CrossRef]
- Fiorini, P.; Hayati, S.; Heverly, M.; Gensler, J. A Hopping Robot for Planetary Exploration. In Proceedings of the 1999 IEEE Aerospace Conference, Snowmass at Aspen, CO, USA, 7 March 1999. [Google Scholar]
- Fiorini, P. Ground Mobility Systems for Planetary Exploration. In Proceedings of the 2000 ICRA, IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000. [Google Scholar]
- Fiorini, P.; Cosma, C.; Confente, M. Localization and Sensing for Hopping Robots. Auton. Robot. 2005, 18, 185–200. [Google Scholar] [CrossRef]
- Yoshimitsu, T.; Kubota, T.; Nakatani, I.; Adachi, T.; Saito, H. Micro-hopping robot for asteroid exploration. Acta Astronaut. 2003, 52, 441–446. [Google Scholar] [CrossRef]
- Kovac, M.; Schlegel, M.; Zufferey, J.-C.; Floreano, D. Steerable miniature jumping robot. Auton. Robot. 2009, 28, 295–306. [Google Scholar] [CrossRef]
- Samo, S.; Ma, S.Y.; Sameh, B.; Song, Q.; Saifullah, S.; Bdran, S. Steer Mechanism for Combustion Piston Type Hopping Robot with Adjustable Hop Angle. Appl. Mech. Mater. 2013, 373, 173–180. [Google Scholar] [CrossRef]
- Ji, X.; Liu, X.; Cacucciolo, V.; Imboden, M.; Civet, Y.; El Haitami, A.; Cantin, S.; Perriard, Y.; Shea, H. An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators. Sci. Robot. 2019, 4, eaaz6451. [Google Scholar] [CrossRef]
- Kellaris, N.; Venkata, V.G.; Smith, G.M.; Mitchell, S.K.; Keplinger, C. Peano-HASEL actuators: Muscle-mimetic, electrohydraulic transducers that linearly contract on activation. Sci. Robot. 2018, 3, eaar3276. [Google Scholar] [CrossRef]
- Xiang, C.; Yang, H.; Sun, Z.; Xue, B.; Hao, L.; Rahoman, M.D.A.; Davis, S. The design, hysteresis modeling and control of a novel SMA-fishing-line actuator. Smart Mater. Struct. 2017, 26. [Google Scholar] [CrossRef]
- Pelrine, R. High-Speed Electrically Actuated Elastomers with Strain Greater Than 100%. Science 2000, 287, 836–839. [Google Scholar] [CrossRef] [PubMed]
- Pelrine, R.; Kornbluh, R.; Kofod, G. High-Strain Actuator Materials Based on Dielectric Elastomers. Adv. Mater. 2000, 12, 1223–1225. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, H.; Mao, J.; Chirarattananon, P.; Helbling, E.F.; Hyun, N.-S.P.; Clarke, D.R.; Wood, R.J. Controlled flight of a microrobot powered by soft artificial muscles. Nature 2019, 575, 324–329. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Li, G.; Liang, Y.; Cheng, T.; Dai, J.; Yang, X.; Liu, B.; Zeng, Z.; Huang, Z.; Luo, Y.; et al. Fast-moving soft electronic fish. Sci. Adv. 2017, 3, e1602045. [Google Scholar] [CrossRef] [PubMed]
- Luan, Y.; Wang, H.; Zhu, Y. Design and Implementation of Cone Dielectric Elastomer Actuator with Double-Slider Mechanism. J. Bionic Eng. 2010, 7, S212–S217. [Google Scholar] [CrossRef][Green Version]
- Zhao, H.; Hussain, A.M.; Duduta, M.; Vogt, D.M.; Wood, R.J.; Clarke, D.R. Compact Dielectric Elastomer Linear Actuators. Adv. Funct. Mater. 2018, 28, 1–12. [Google Scholar] [CrossRef]
- Kovacs, G.; Düring, L.; Michel, S.; Terrasi, G. Stacked dielectric elastomer actuator for tensile force transmission. Sens. Actuators A Phys. 2009, 155, 299–307. [Google Scholar] [CrossRef]
- Plante, J.-S.; DeVita, L.M.; Dubowsky, S. A Road to Practical Dielectric Elastomer Actuators Based Robotics and Mechatronics: Discrete Actuation. In Proceedings of the 14th International Symposium on: Smart Structures and Materials & Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 18–22 March 2007. [Google Scholar]
- Bar-Cohen, Y. Electroactive Polymers As Artificial Muscles—Reality and Challenges. In Proceedings of the 19th AIAA Applied Aerodynamics Conference, Anaheim, CA, USA, 11–14 June 2001. [Google Scholar]
- Kim, K.J.; Tadokoro, S. Electroactive Polymers for Robotic Applications. Electroact. Polym. Robot. Appl. 2007, 23, 291. [Google Scholar]
- Blickhan, R. The spring-mass model for running and hopping. J. Biomech. 1989, 22, 1217–1227. [Google Scholar] [CrossRef]















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, B.; Li, B.; Yu, Y.; Yu, M.; Ma, J.; Yang, W.; Wang, P.; Jiao, Z. A Jumping Robot Driven by a Dielectric Elastomer Actuator. Appl. Sci. 2020, 10, 2241. https://doi.org/10.3390/app10072241
Luo B, Li B, Yu Y, Yu M, Ma J, Yang W, Wang P, Jiao Z. A Jumping Robot Driven by a Dielectric Elastomer Actuator. Applied Sciences. 2020; 10(7):2241. https://doi.org/10.3390/app10072241
Chicago/Turabian StyleLuo, Bin, Bingyang Li, Yuan Yu, Meng Yu, Jiaqi Ma, Weimin Yang, Pengfei Wang, and Zhiwei Jiao. 2020. "A Jumping Robot Driven by a Dielectric Elastomer Actuator" Applied Sciences 10, no. 7: 2241. https://doi.org/10.3390/app10072241
APA StyleLuo, B., Li, B., Yu, Y., Yu, M., Ma, J., Yang, W., Wang, P., & Jiao, Z. (2020). A Jumping Robot Driven by a Dielectric Elastomer Actuator. Applied Sciences, 10(7), 2241. https://doi.org/10.3390/app10072241