Smart Transformers as Active Interfaces Enabling the Provision of Power-Frequency Regulation Services from Distributed Resources in Hybrid AC/DC Grids




Abstract
1. Introduction
2. Computational Simulation Models
- The simulation layer encompassing the electrical grid components (cables, loads—impedance types—filter of the power converters, etc.) was defined to operate with a time step of 10 s (100 kHz). The chosen time step was chosen as a compromise between simulation accuracy and simulation speed, following the value adopted in [34];
- The simulation layer encompassing the control structures and electronic power components of the ST itself was modeled according to the aforementioned DAM approach, but considering a switching frequency of 20 kHz for the power converters, which results in a simulation time step of 50 s. The switching elements are replaced by controlled voltage and current sources, where the respective controlling signals are discretized according the switching frequency chosen to the replaced switching elements. The motive for this distinction is because a switching frequency of 20 kHz is more realistic (comparatively to 100 kHz) when considering high power electronic converters [22,35,36]. Thus, this approach allows further improvements in the computational performance of the developed models.
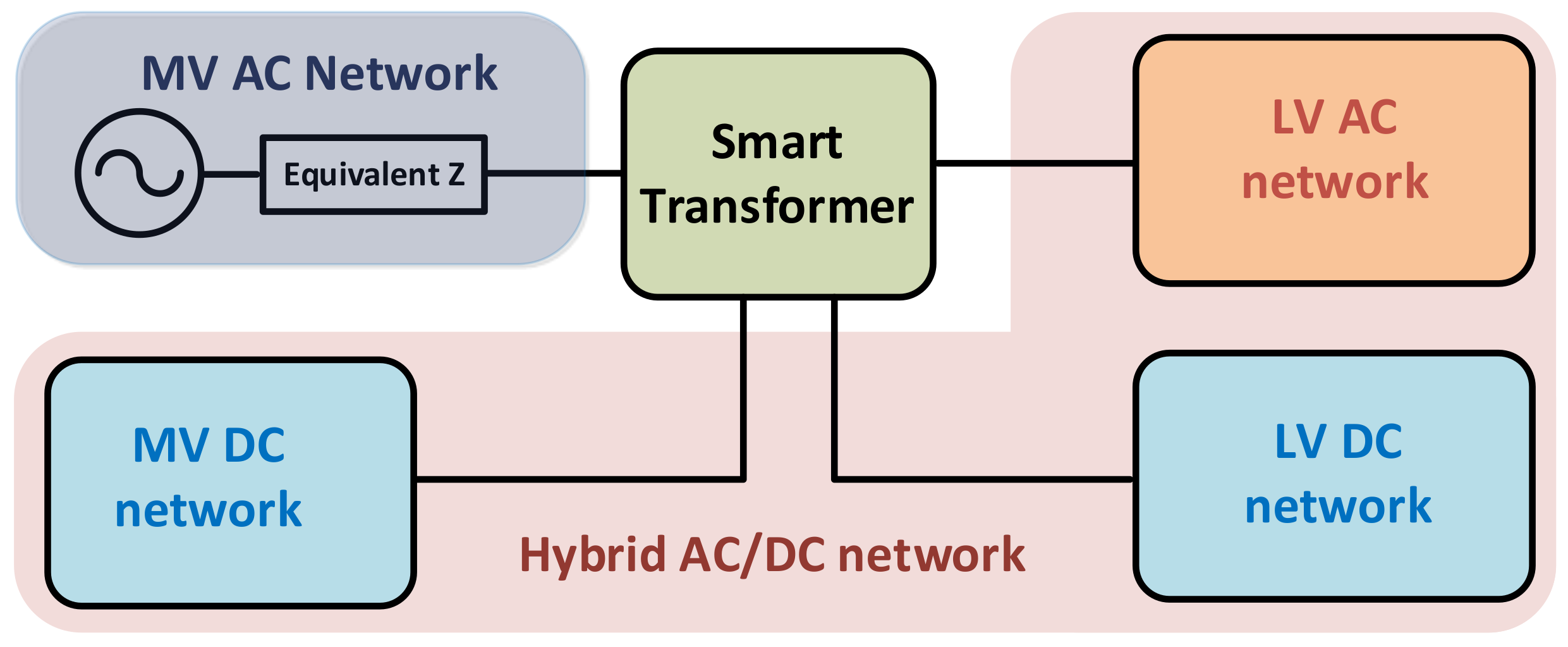
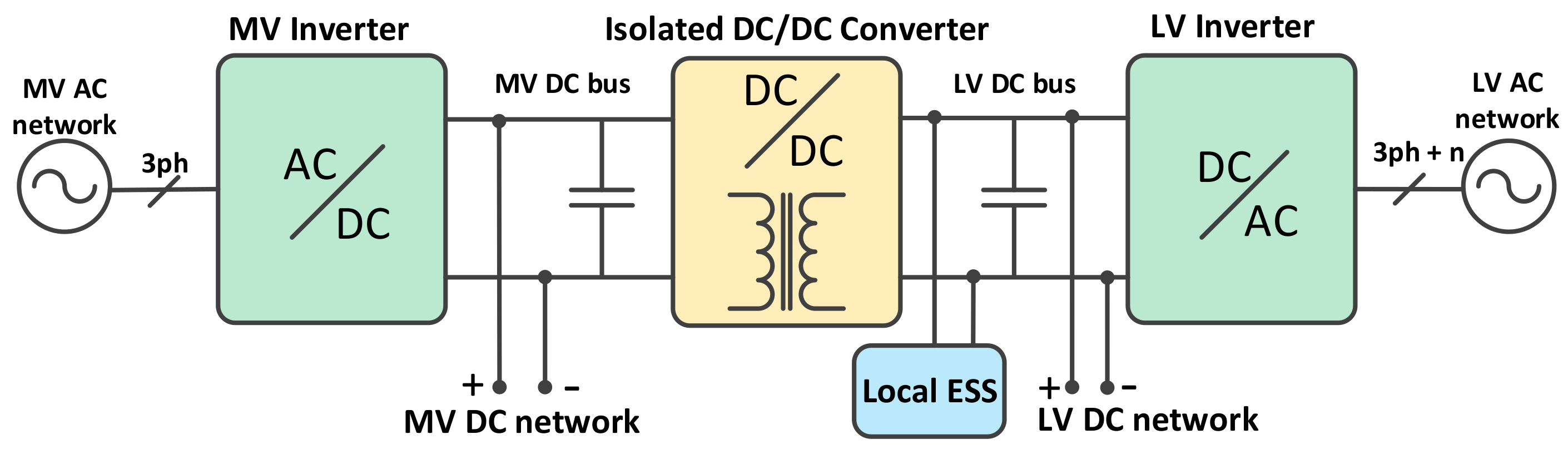
2.1. Smart Transformer
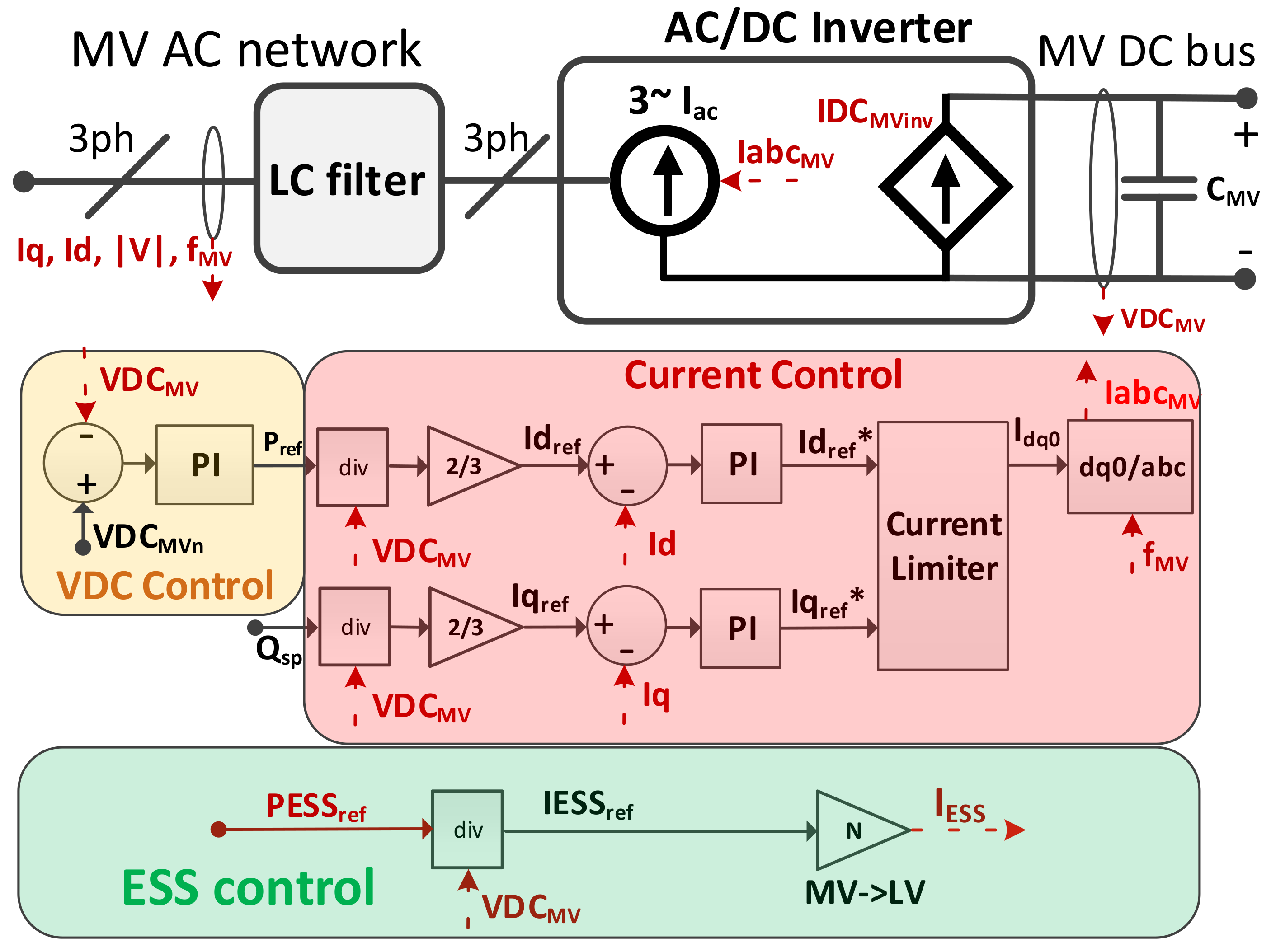
2.1.1. Medium Voltage Inverter
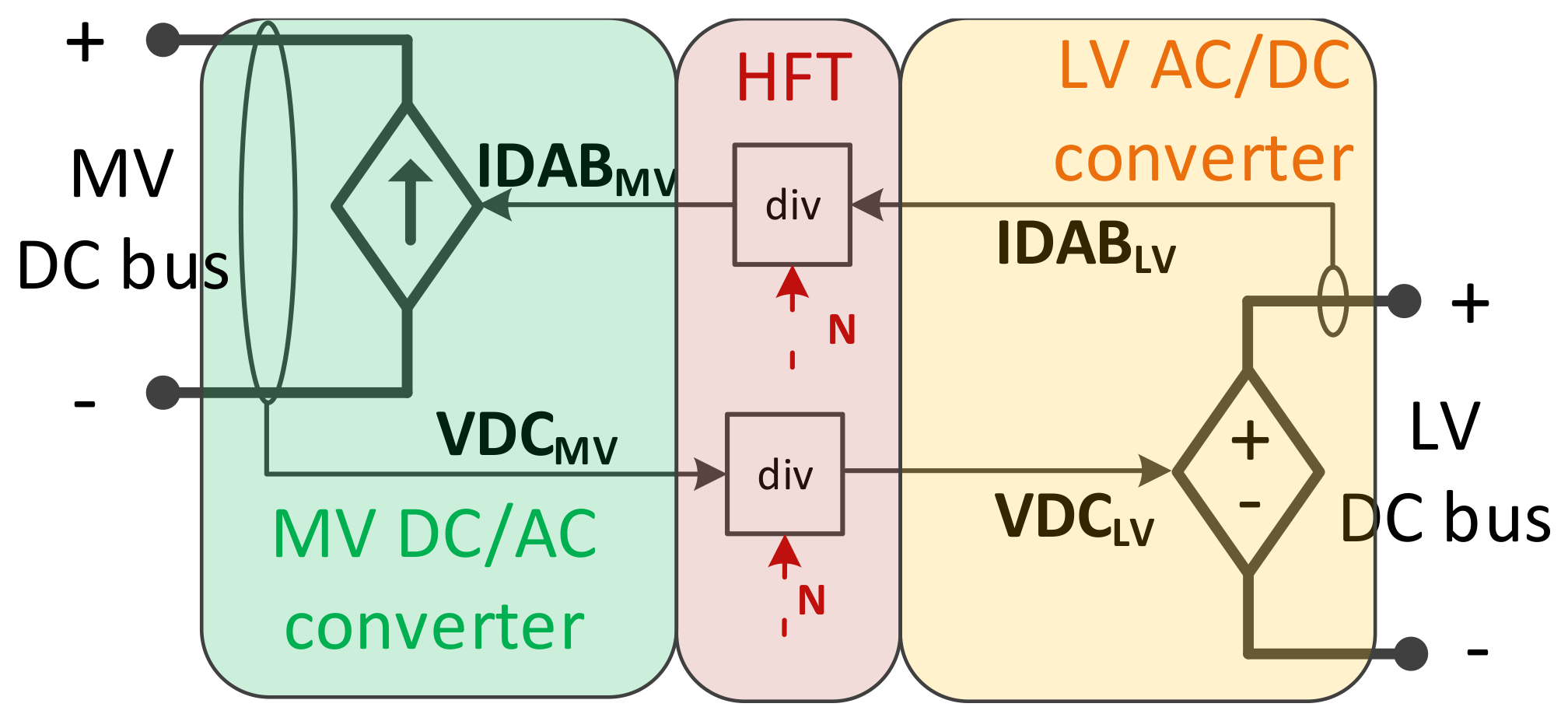
2.1.2. Isolated DC/DC Converter
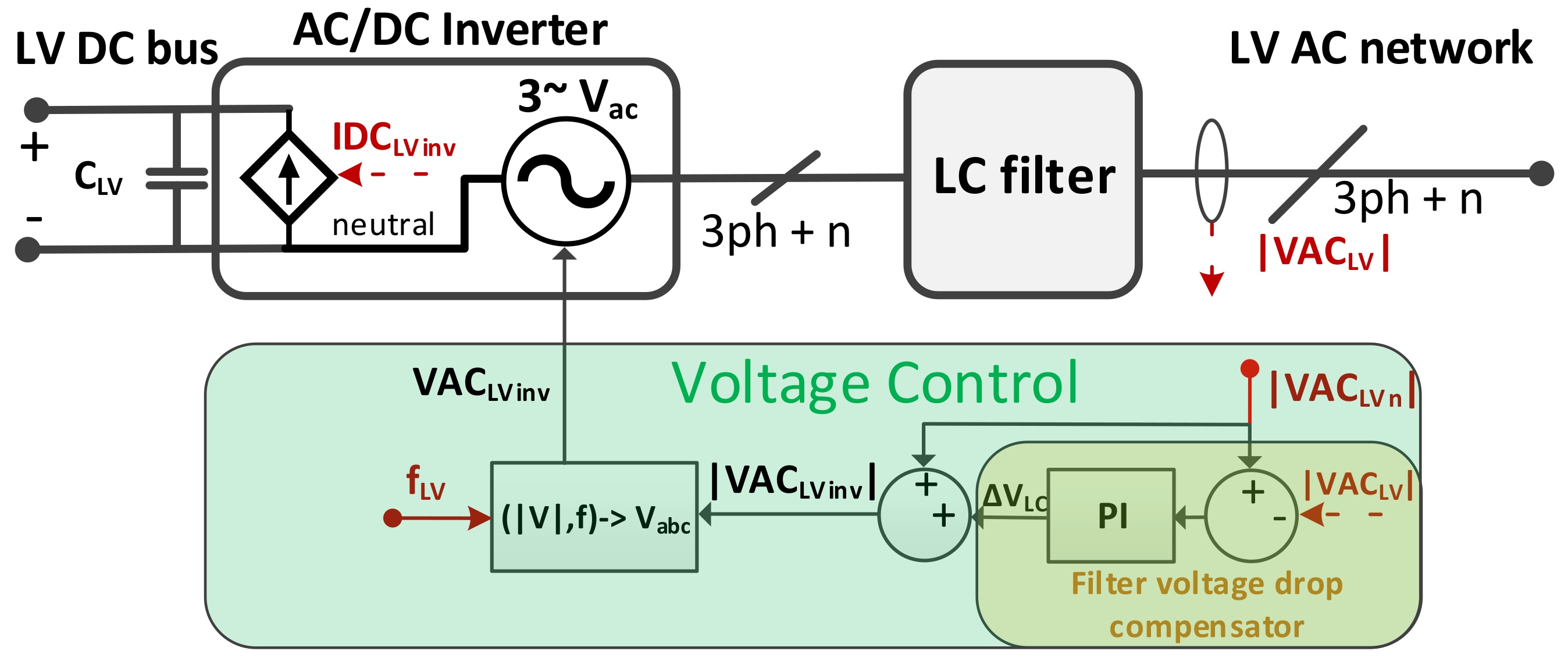
2.1.3. Low Voltage Inverter
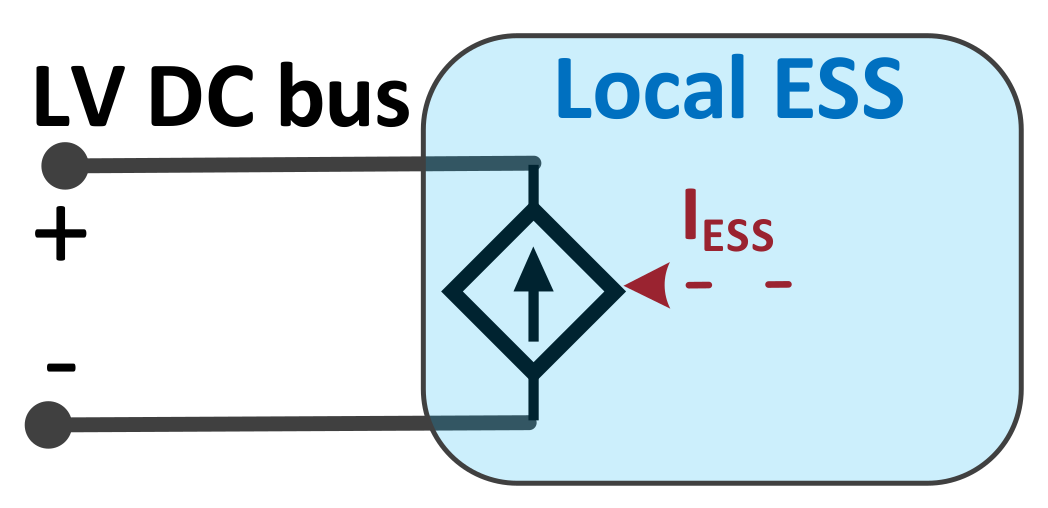
2.1.4. Local ESS
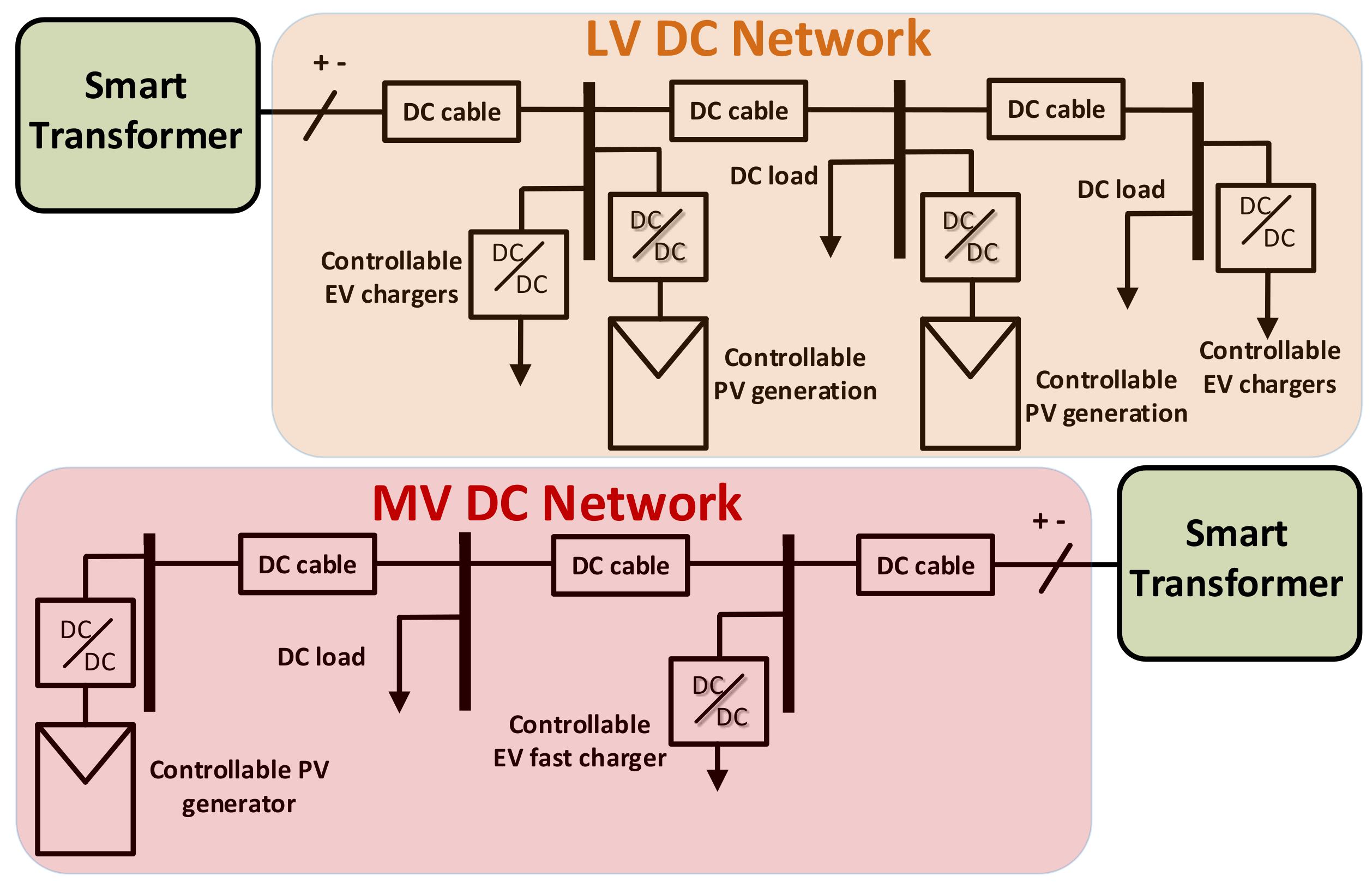
2.2. MV and LV DC Networks
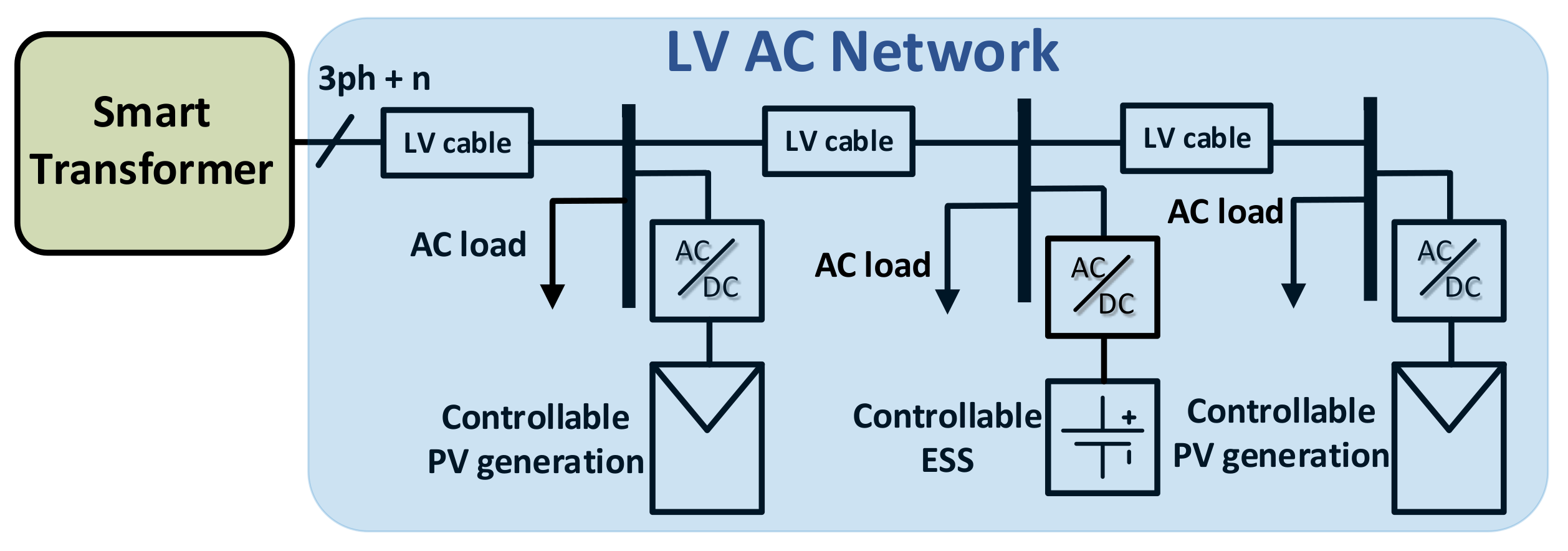
2.3. LV AC Network
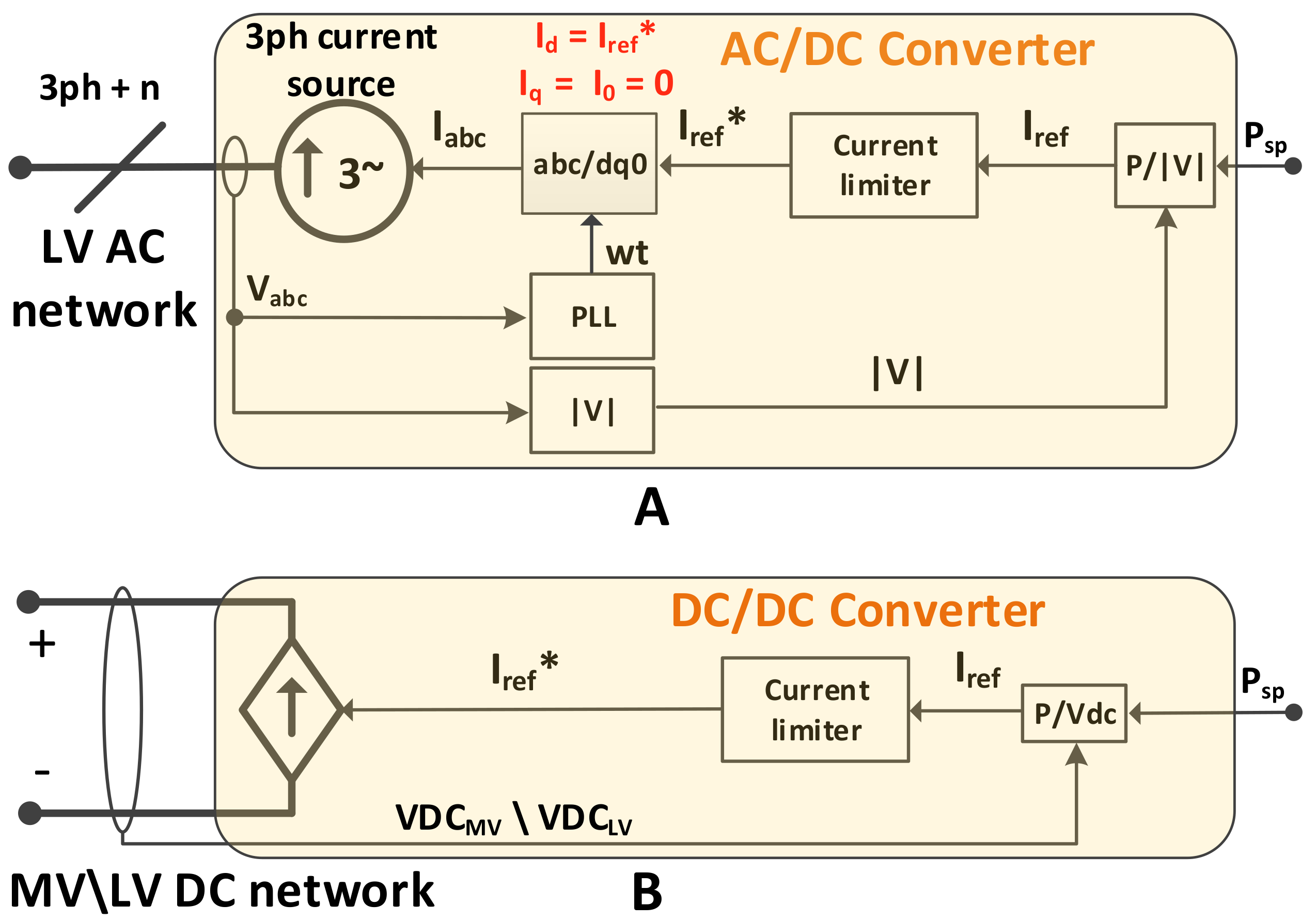
2.4. Distributed Energy Resources
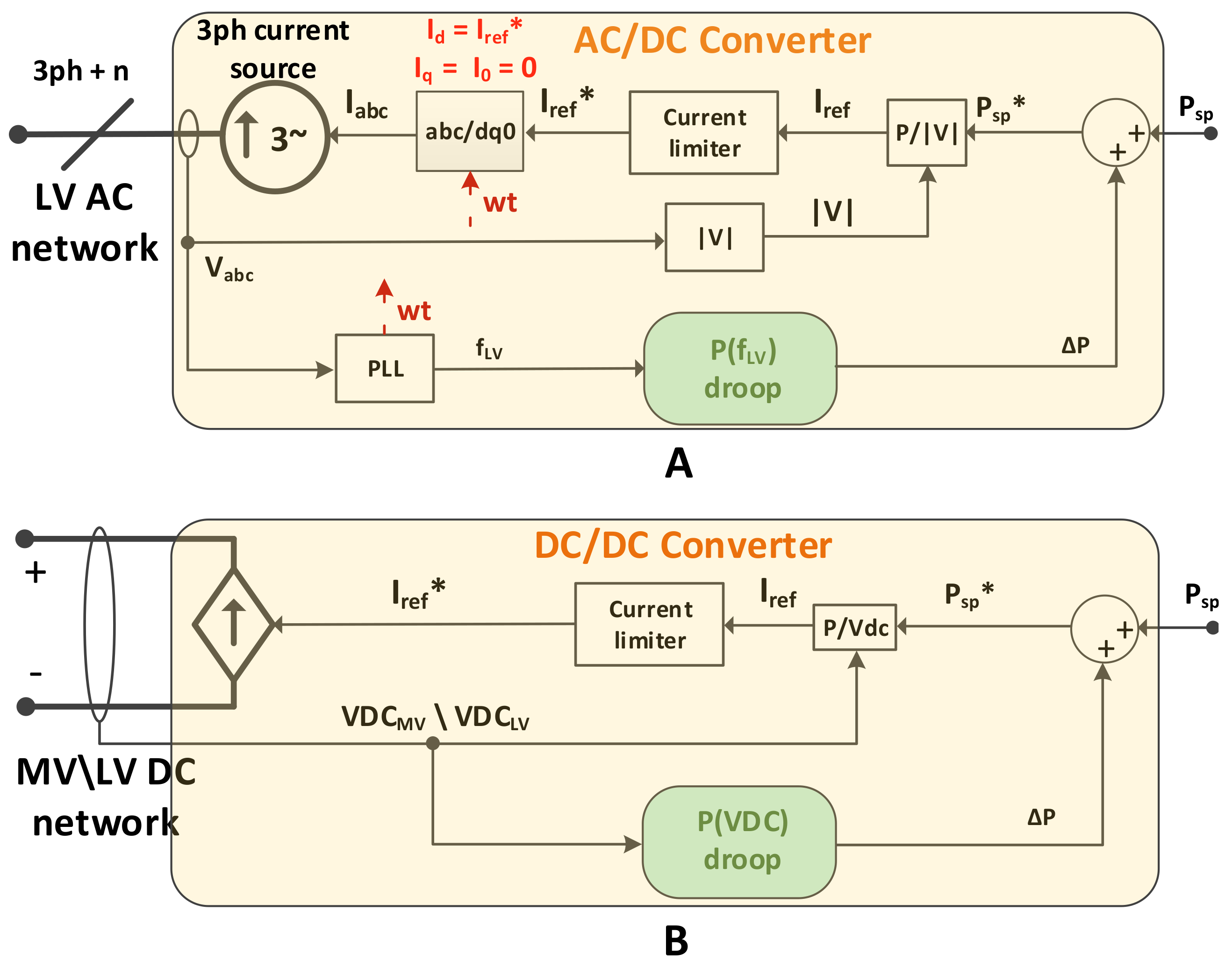
- The dynamics of the physical phenomena behind the AC or DC power converter stages used to connect the different DER units to the corresponding grid can be neglected. Given this, the models of the resources to be controlled, namely, the PV panels, EV and storage units, were considered to be operating around a given active power reference (), the dynamics of the PV panels itself as well as the internal dynamics of batteries used in EV or stationary ESS being neglected.
- According to the DAM approach, the low-level voltage control loop and the modulation mechanisms (e.g., PWM, SPWM or others) can be neglected, the interface to the grid (AC or DC) being represented by controlled current sources.
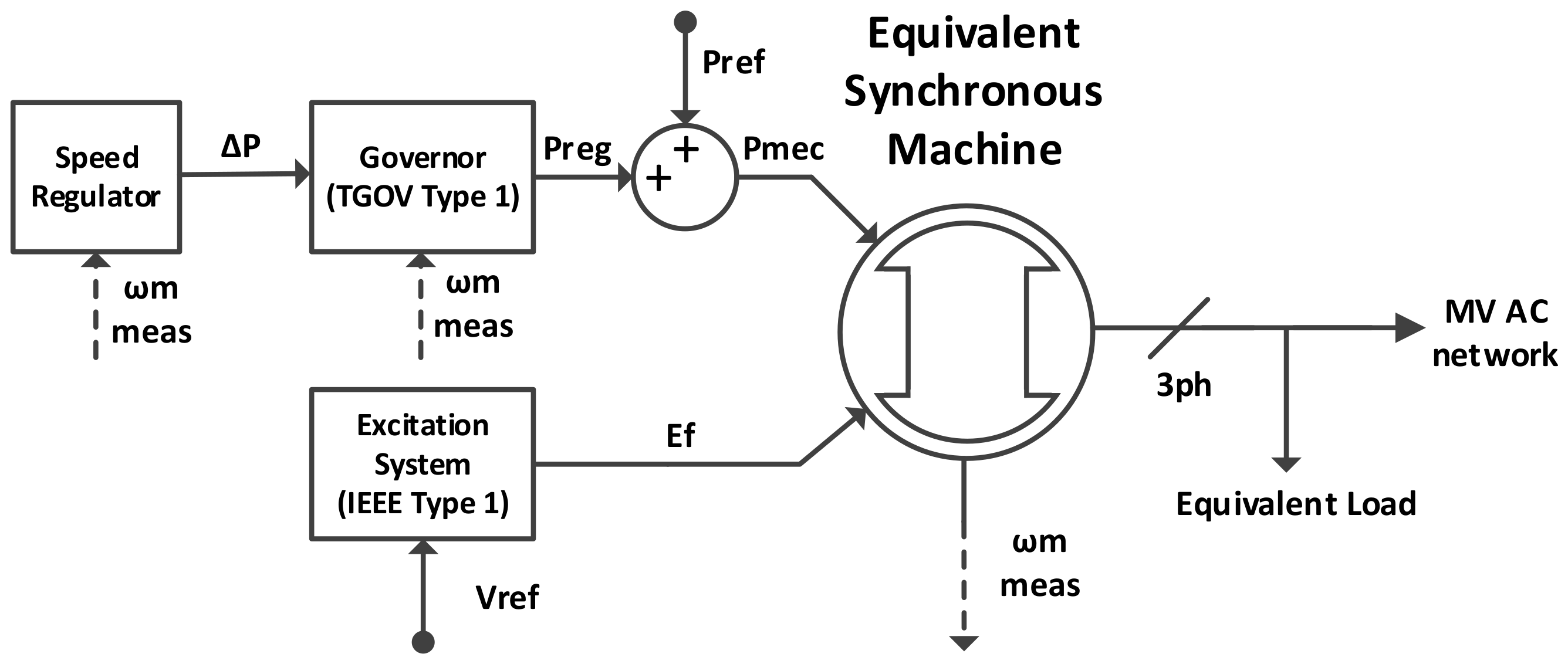
2.5. MV AC Network
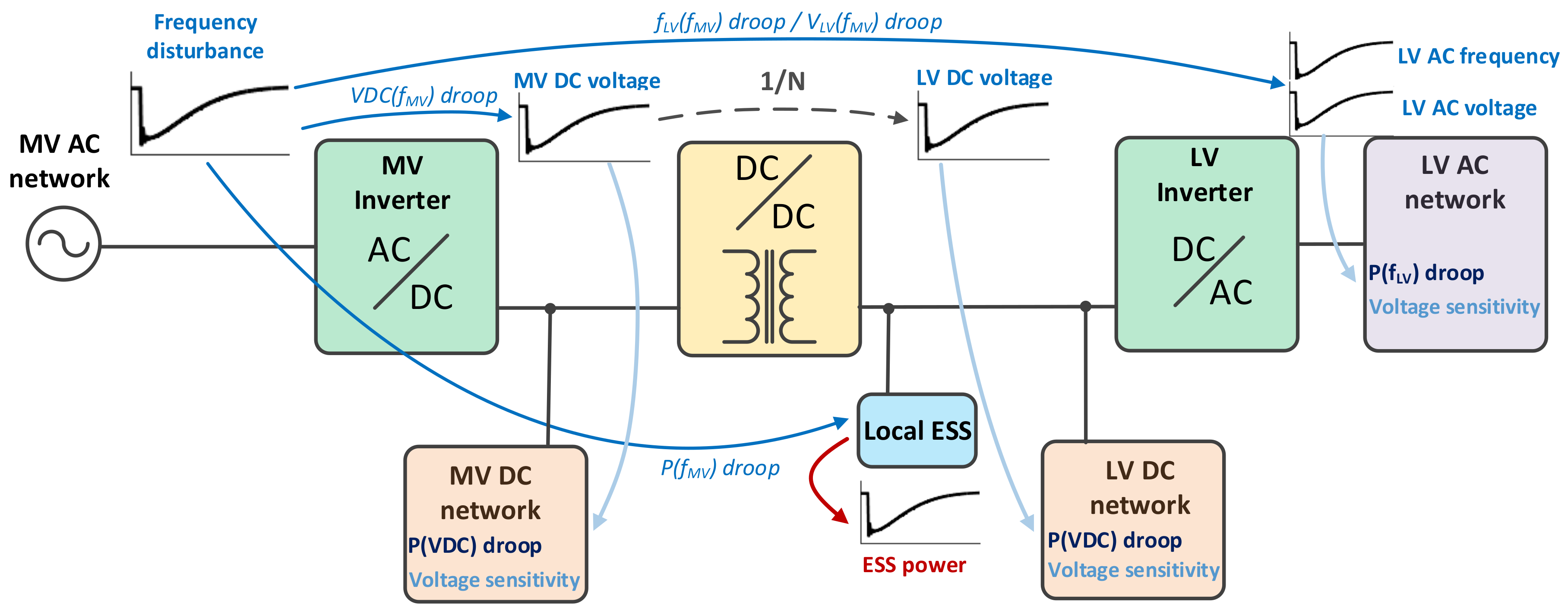
3. Advanced Control Functionalities for Power-Frequency Regulation
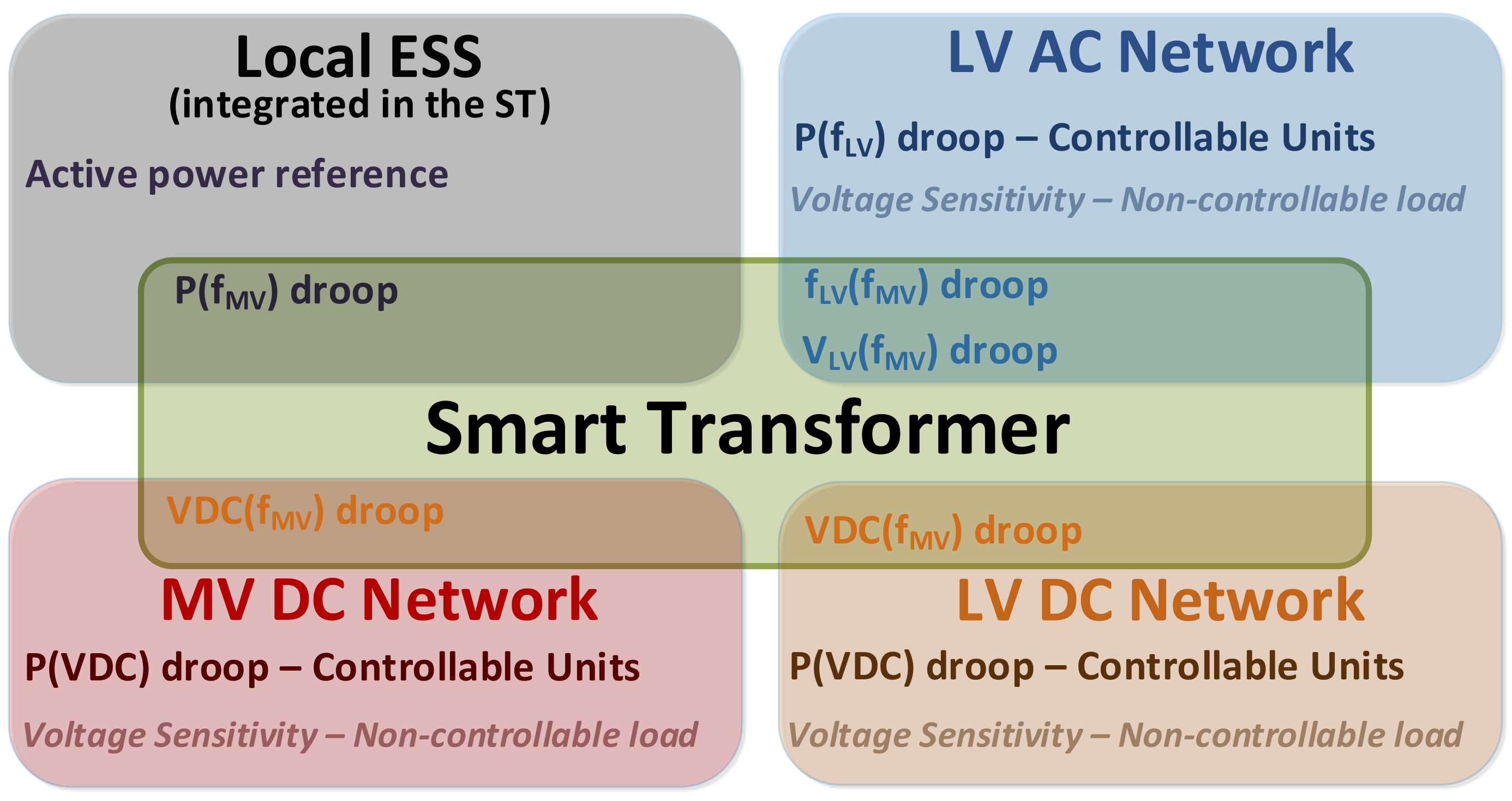
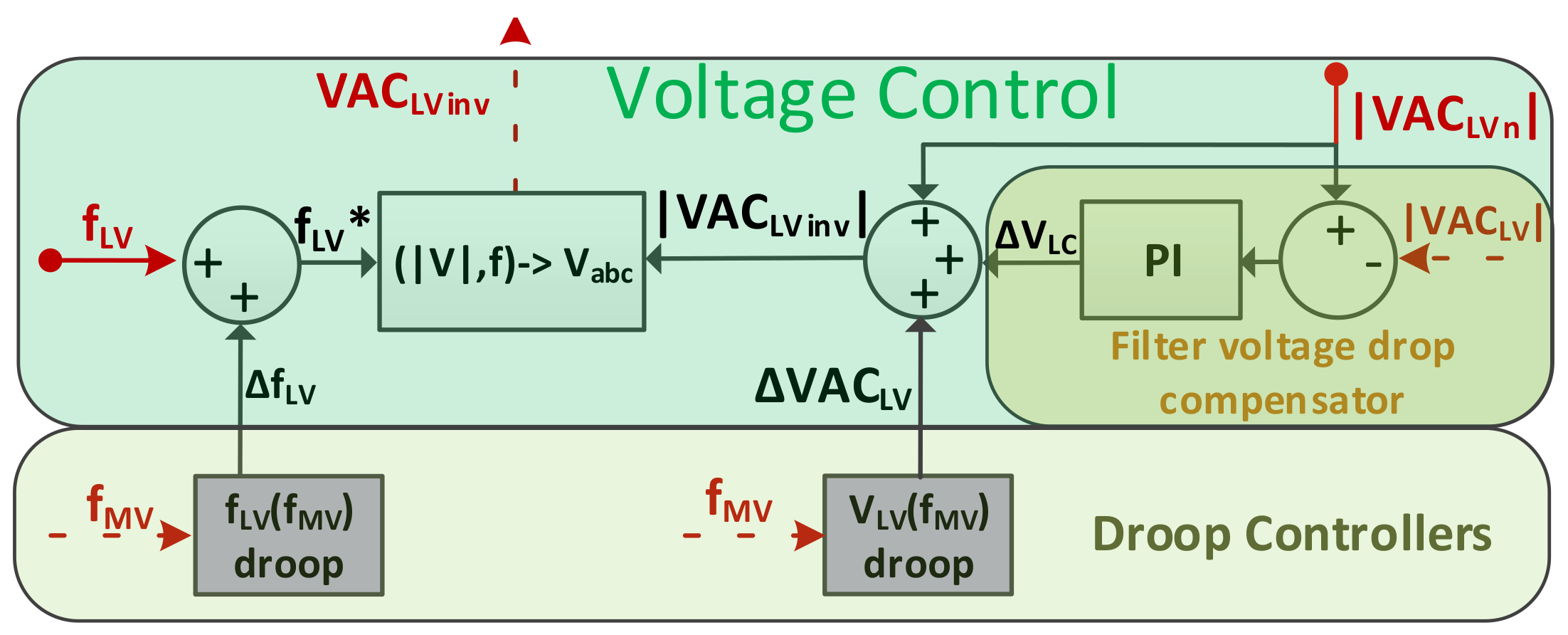
3.1. Droop Controllers Proposed to Be Incorporated in the Smart-Transformer
3.1.1. Droop
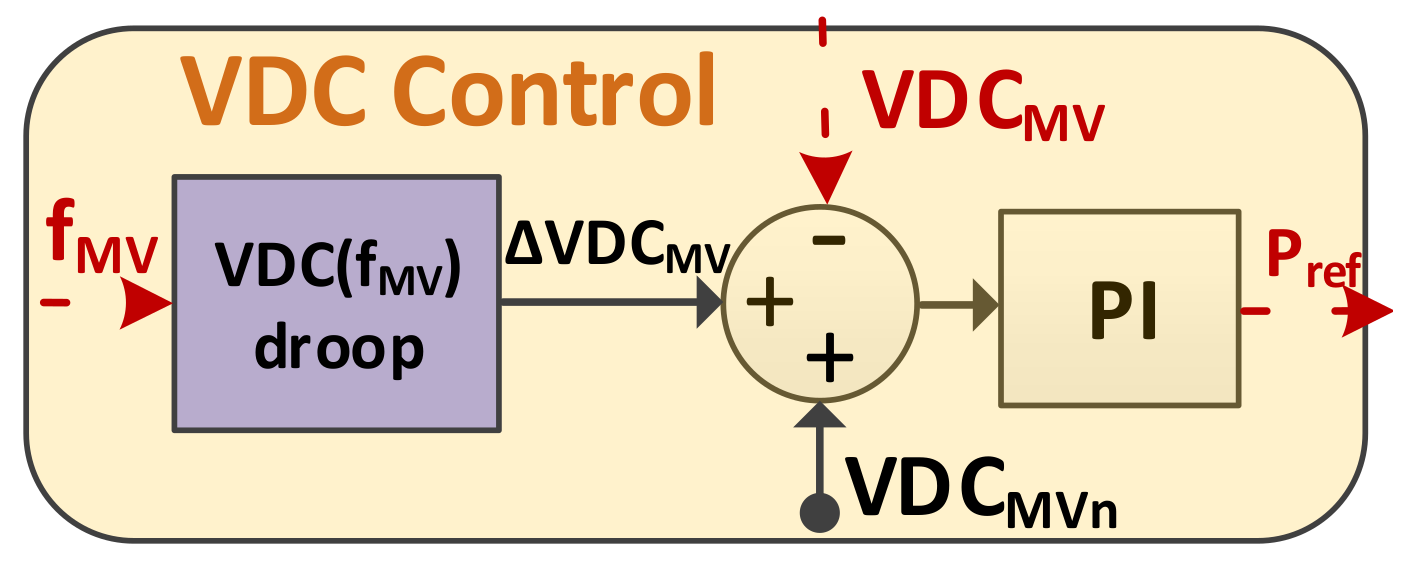
3.1.2. Droop
3.1.3. Droop
3.1.4. Droop
3.2. Droop Controllers Implemented in the Controllable Units Available in the Hybrid AC/DC Network
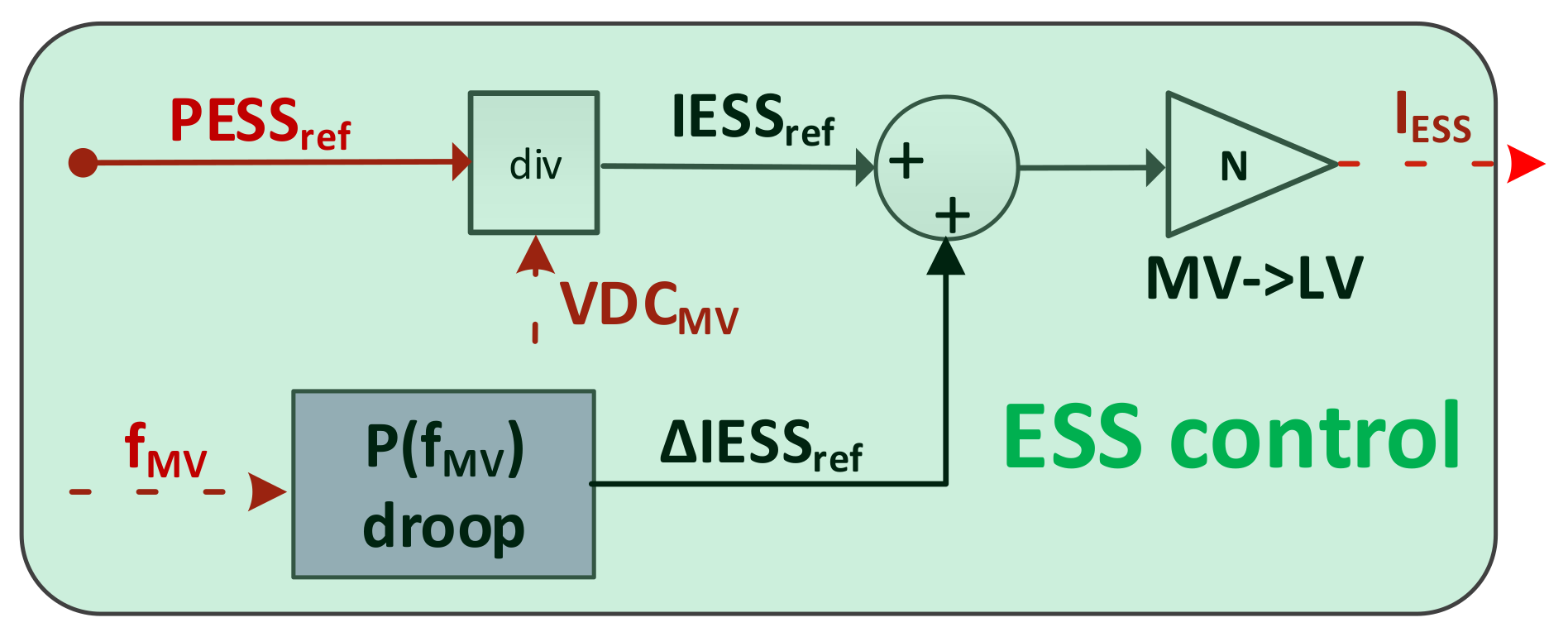
3.2.1. Droop
3.2.2. Droop
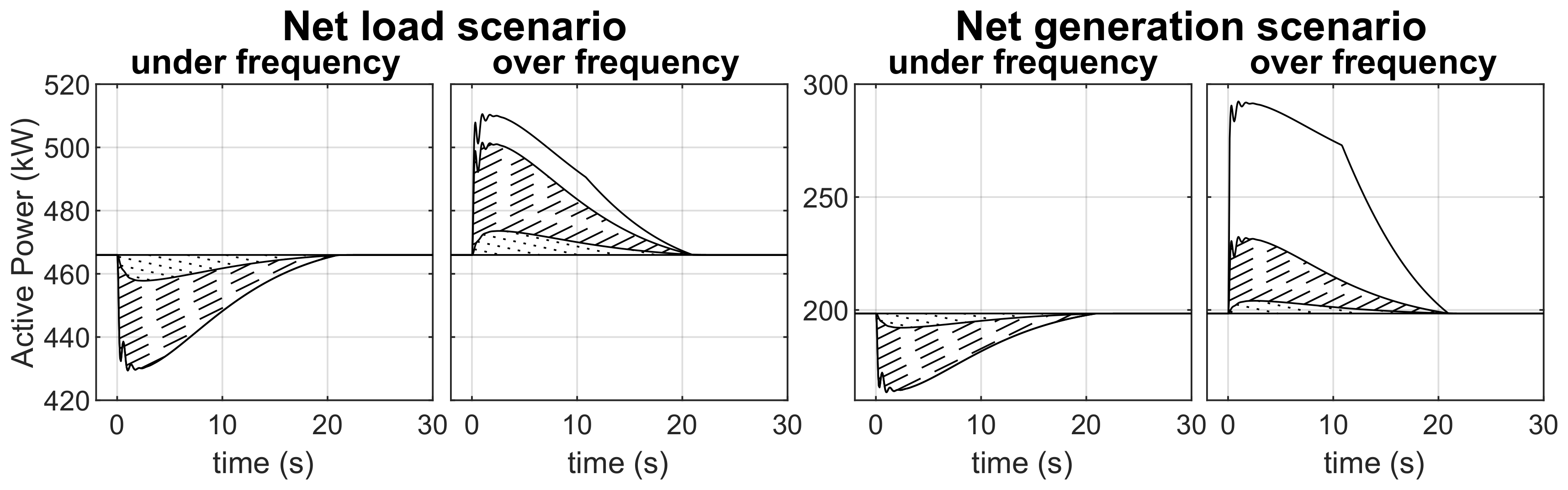
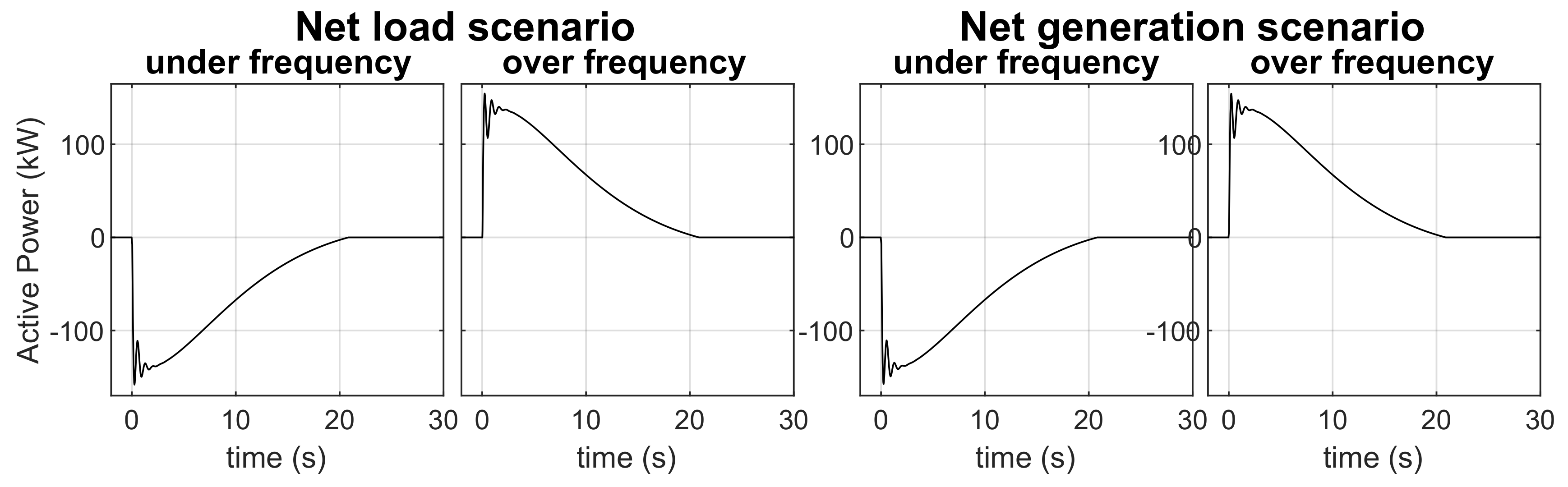
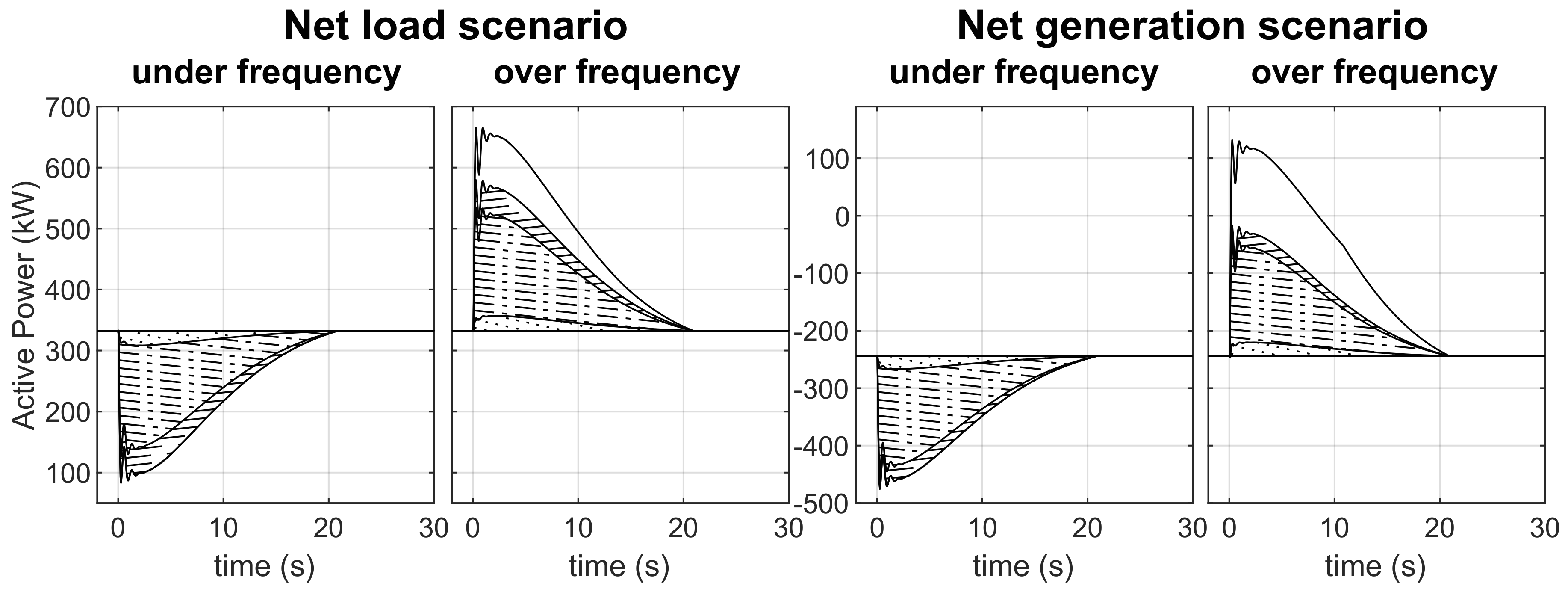
4. Results and Discussion
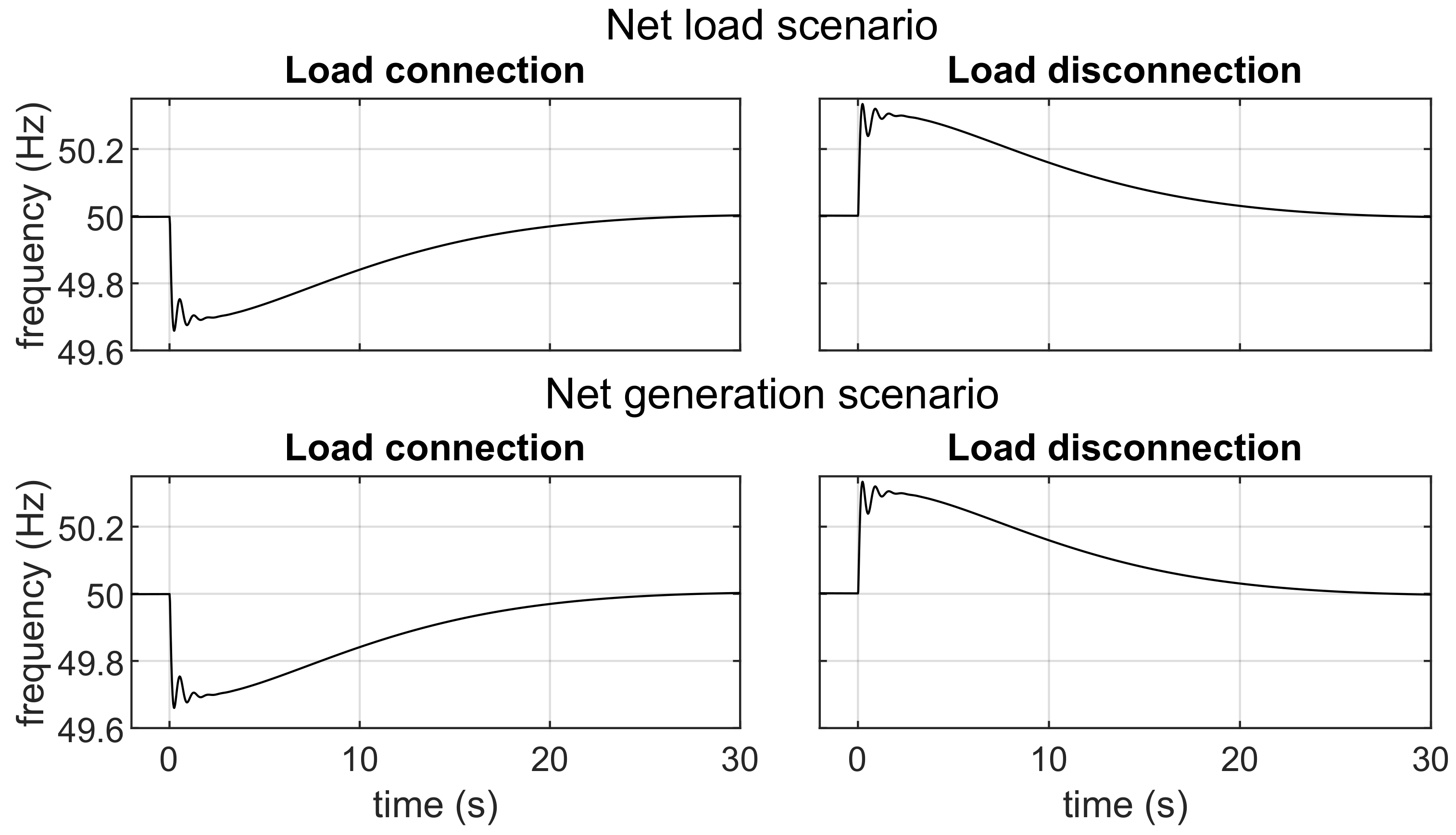
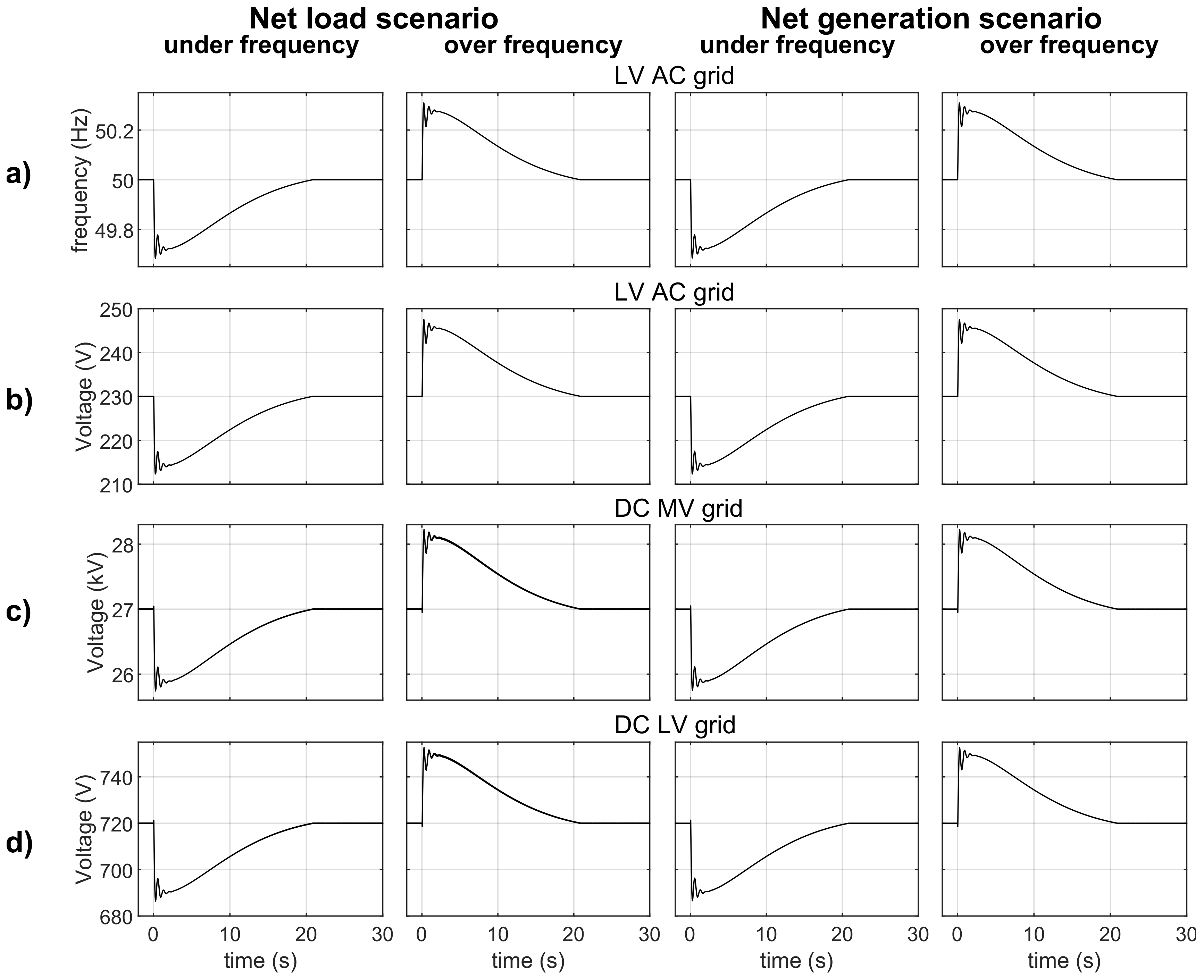
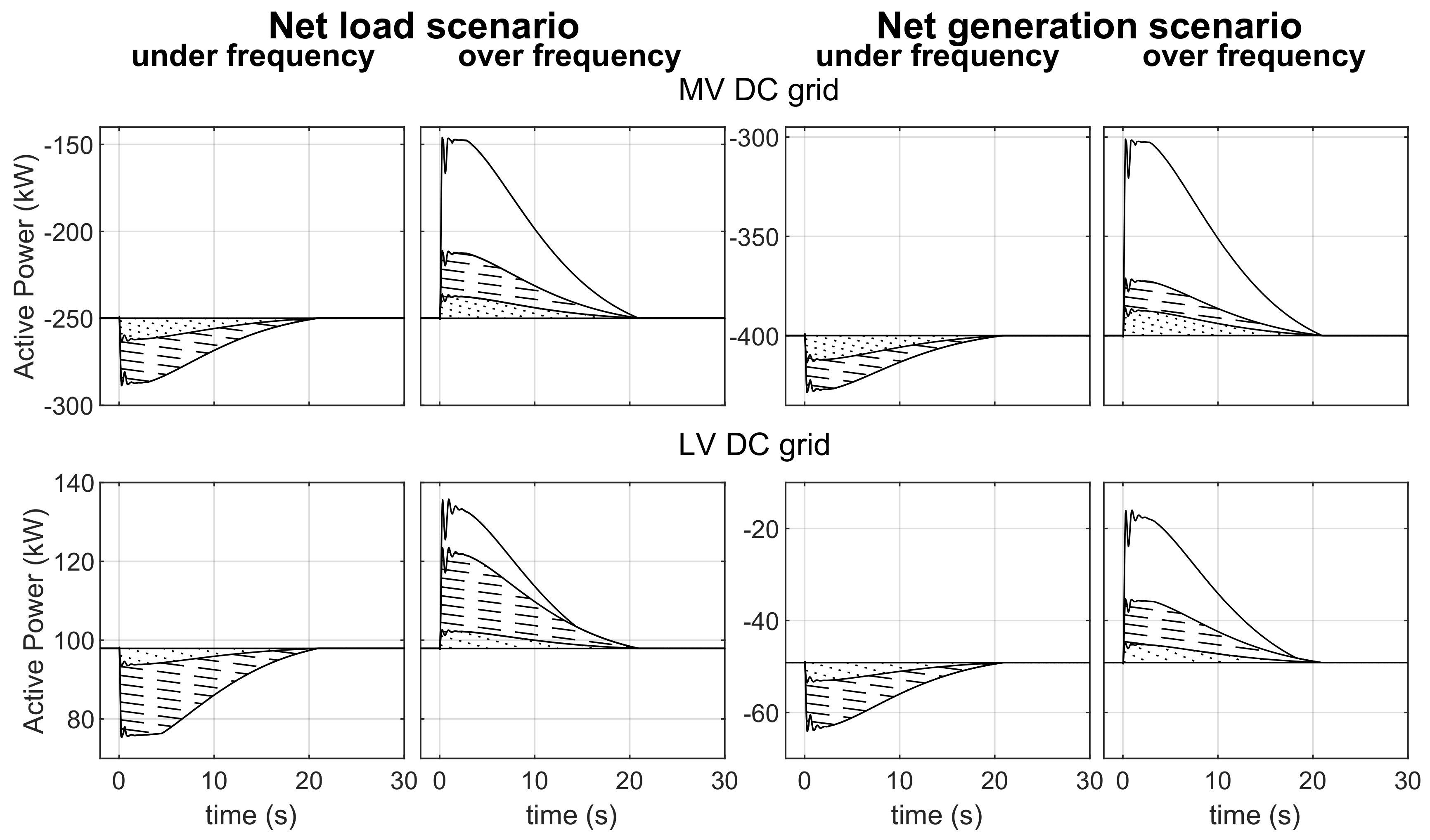
- Over frequency event in the upstream AC grid and net load scenario in the hybrid distribution network;
- Over frequency event in the upstream AC grid and a net generation scenario in the hybrid distribution network;
- Under frequency event in the upstream AC grid and a net load scenario in the hybrid distribution network;
- Under frequency event in the upstream AC grid and a net generation scenario in the hybrid distribution network.
4.1. Model Parameters
4.2. Simulation results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Output from the droop controller | |
| Output from the droop controller | |
| Output from the Droop and Droop Controllers | |
| Compensation component for the Voltage drop in the LC filter | |
| Output from the droop controller | |
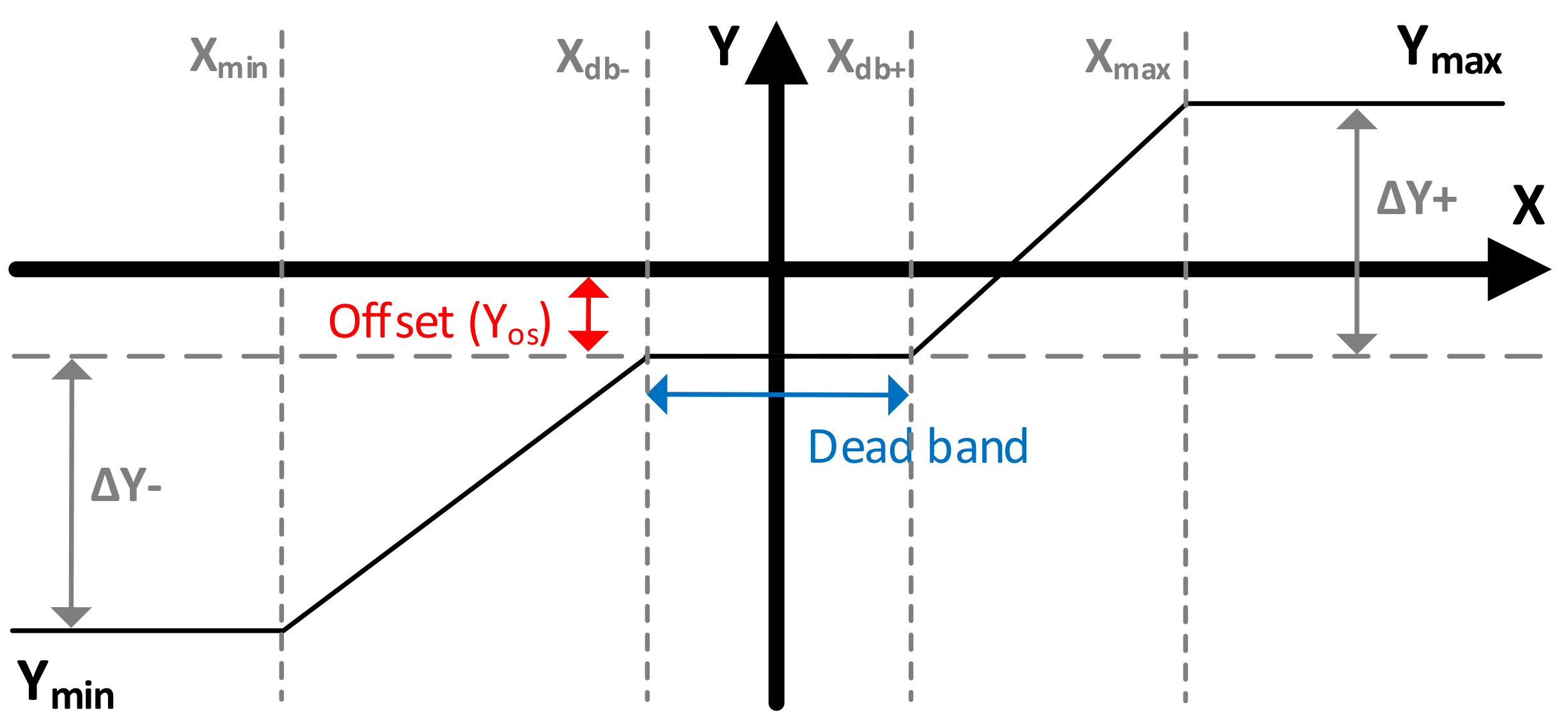
| / | Maximum negative/positive variation of Y in the droop controller around |
| Output from the droop controller | |
| Phase-shift between the square waveforms applied to the HFT | |
| C | Capacitance of the coupling filter |
| Capacitance of the ST’s LV DC bus | |
| Capacitance of the ST’s MV DC bus | |
| Cut-off frequency of the coupling filter | |
| Reference frequency for the ST’s LV inverter | |
| Frequency (AC LV grid) - frequency (AC MV grid) droop | |
| Frequency measured in the MV AC network | |
| Current in the local ESS | |
| AC currents in the ST’s LV inverter, each phase | |
| AC currents in the ST’s MV inverter, each phase | |
| Measured active current in the ST’s MV inverter | |
| , | Reference for the active current in the ST’s MV inverter |
| DC current in the secondary stage of the isolated DC/DC converter | |
| DC current in the primary stage of the isolated DC/DC converter | |
| Current exchanged between and the ST’s LV DC network | |
| Current exchanged between the ST’s LV inverter and the ST’s LV DC bus | |
| Current exchanged between and the ST’s MV DC network | |
| Current exchanged between the ST’s MV inverter and the ST’s MV DC bus | |
| MV side equivalent for the reference current for the local ESS | |
| Current flowing to the capacitance | |
| Current flowing to the capacitance | |
| Maximum AC current peak value of the ST’s MV inverter | |
| Measured reactive current in the ST’s MV inverter | |
| , | Reference for the reactive current in the ST’s MV inverter |
| L | Inductance of the coupling filter |
| Slope of the droop controller | |
| N | Transformation ratio of the isolated DC-DC converter |
| Active power-frequency (AC LV grid) droop | |
| Active power-frequency (AC MV grid) droop | |
| Active power - DC voltage droop | |
| Reference active power for the ST’s MV inverter | |
| Power output of the isolated DC/DC converter in the LV side | |
| Power output of the isolated DC/DC converter in the MV side | |
| Active power set-point for the local ESS | |
| Active power in the ST’s LV inverter | |
| Active power exchanged between the ST and the upstream MV AC grid | |
| Voltage (AC LV grid) - frequency (AC MV grid) droop | |
| AC voltages in the ST’s LV inverter, each phase | |
| AC voltages in the ST’s MV inverter, each phase | |
| Reference three-phase voltage for the ST’s LV inverter | |
| Reference for the three-phase AC voltage in the ST’s LV inverter | |
| DC Voltage (MV DC bus) - frequency (AC MV grid) droop | |
| Reference value for the DC voltage in the ST’s LV DC bus | |
| DC voltage in the ST’s LV DC bus | |
| Reference value for the DC voltage in the ST’s MV DC bus | |
| DC voltage in the ST’s MV DC bus | |
| / | Dead-band limits of the droop controller |
| Primary-referred leakage reactance of the isolated DC/DC converter | |
| / | Minimum/maximum value of X at which the droop controller responds |
| / | Minimum/maximum output of the droop controller |
| Offset value of the droop controller | |
| Characteristic impedance of the coupling filter |
References
- IRENA. Global Energy Transformation: A Roadmap to 2050 (2019 Edition); Technical report; International Renewable Energy Agency: Abu Dhabi, UAE, 2019. [Google Scholar]
- IEA. Renewables 2018: Analysis and Forecasts to 2023; Technical report; International Energy Agency: Paris, France, 2018. [Google Scholar]
- IEA. Global EV Outlook 2018: Towards Cross-Modal Electrification; Technical report; International Energy Agency: Paris, France, 2018. [Google Scholar]
- De Hoog, J.; Alpcan, T.; Brazil, M.; Thomas, D.A.; Mareels, I. Optimal Charging of Electric Vehicles Taking Distribution Network Constraints into Account. IEEE Trans. Power Syst. 2015, 30, 365–375. [Google Scholar] [CrossRef]
- Veldman, E.; Verzijlbergh, R.A. Distribution Grid Impacts of Smart Electric Vehicle Charging From Different Perspectives. IEEE Trans. Smart Grid 2015, 6, 333–342. [Google Scholar] [CrossRef]
- Remon, D.; Cantarellas, A.M.; Mauricio, J.M.; Rodriguez, P. Power system stability analysis under increasing penetration of photovoltaic power plants with synchronous power controllers. IET Renew. Power Gener. 2017, 11, 733–741. [Google Scholar] [CrossRef]
- He, G.; Chen, Q.; Kang, C.; Xia, Q.; Poolla, K. Cooperation of Wind Power and Battery Storage to Provide Frequency Regulation in Power Markets. IEEE Trans. Power Syst. 2017, 32, 3559–3568. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. Distributed Power System Virtual Inertia Implemented by Grid-Connected Power Converters. IEEE Trans. Power Electron. 2018, 33, 8488–8499. [Google Scholar] [CrossRef]
- Molina-García, Á.; Mastromauro, R.A.; García-Sánchez, T.; Pugliese, S.; Liserre, M.; Stasi, S. Reactive Power Flow Control for PV Inverters Voltage Support in LV Distribution Networks. IEEE Trans. Smart Grid 2017, 8, 447–456. [Google Scholar] [CrossRef]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.P.; Hansen, T.M.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Fan, Z.; Kulkarni, P.; Gormus, S.; Efthymiou, C.; Kalogridis, G.; Sooriyabandara, M.; Zhu, Z.; Lambotharan, S.; Chin, W.H. Smart Grid Communications: Overview of Research Challenges, Solutions, and Standardization Activities. IEEE Commun. Surv. Tutor. 2013, 15, 21–38. [Google Scholar] [CrossRef]
- Gouveia, C.; Rua, D.; Ribeiro, F.; Miranda, L.; Rodrigues, J.; Moreira, C.; Lopes, J.P. Experimental validation of smart distribution grids: Development of a microgrid and electric mobility laboratory. Int. J. Electr. Power Energy Syst. 2016, 78, 765–775. [Google Scholar] [CrossRef]
- European Commission. Establishing a Network Code on Requirements for Grid Connection of Generators, no 2016/631; European Commission: Brussels, Belgium, 14 April 2016. [Google Scholar]
- Justo, J.J.; Mwasilu, F.; Lee, J.; Jung, J.W. AC-microgrids versus DC-microgrids with distributed energy resources: A review. Renew. Sustain. Energy Rev. 2013, 24, 387–405. [Google Scholar] [CrossRef]
- Yoldaş, Y.; Önen, A.; Muyeen, S.; Vasilakos, A.V.; Alan, İ. Enhancing smart grid with microgrids: Challenges and opportunities. Renew. Sustain. Energy Rev. 2017, 72, 205–214. [Google Scholar] [CrossRef]
- Hatziargyriou, N. Operation of Multi-Microgrids. In Microgrids: Architectures and Control; IEEE: New York, NY, USA, 2014; pp. 165–205. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A. Hierarchical Structure of Microgrids Control System. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of Power Sharing Control Strategies for Islanding Operation of AC Microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef]
- Mirsaeidi, S.; Dong, X.; Shi, S.; Tzelepis, D. Challenges, advances and future directions in protection of hybrid AC/DC microgrids. IET Renew. Power Gener. 2017, 11, 1495–1502. [Google Scholar] [CrossRef]
- Dragičević, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part I: A Review of Control Strategies and Stabilization Techniques. IEEE Trans. Power Electron. 2016, 31, 4876–4891. [Google Scholar]
- Dragičević, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part II: A Review of Power Architectures, Applications, and Standardization Issues. IEEE Trans. Power Electron. 2016, 31, 3528–3549. [Google Scholar] [CrossRef]
- Ferreira Costa, L.; De Carne, G.; Buticchi, G.; Liserre, M. The Smart Transformer: A solid-state transformer tailored to provide ancillary services to the distribution grid. IEEE Power Electron. Mag. 2017, 4, 56–67. [Google Scholar] [CrossRef]
- Liserre, M.; Buticchi, G.; Andresen, M.; Carne, G.D.; Costa, L.F.; Zou, Z. The Smart Transformer: Impact on the Electric Grid and Technology Challenges. IEEE Ind. Electron. Mag. 2016, 10, 46–58. [Google Scholar] [CrossRef]
- De Carne, G.; Zou, Z.; Buticchi, G.; Liserre, M.; Vournas, C. Overload Control in Smart Transformer-Fed Grid. Appl. Sci. 2017, 7, 208. [Google Scholar] [CrossRef]
- Couto, M.; Lopes, J.P.; Moreira, C. Control strategies for Multi-Microgrids islanding operation through Smart Transformers. Electr. Power Syst. Res. 2019, 174, 105866. [Google Scholar] [CrossRef]
- Stenclik, D.; Denholm, P.; Chalamala, B. Maintaining Balance: The Increasing Role of Energy Storage for Renewable Integration. IEEE Power Energy Mag. 2017, 15, 31–39. [Google Scholar] [CrossRef]
- Zou, Z.X.; Carne, G.D.; Buticchi, G.; Liserre, M. Frequency-Adaptive Control of Smart Transformer-Fed Distribution Grid. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016. [Google Scholar]
- Carne, G.D.; Buticchi, G.; Liserre, M.; Marinakis, P.; Vournas, C. Coordinated frequency and Voltage Overload Control of Smart Transformers. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–5. [Google Scholar]
- De Carne, G.; Buticchi, G.; Liserre, M. Reverse power flow control in a ST-fed distribution grid. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–5. [Google Scholar]
- Chen, J.; Zhu, R.; Liu, M.; De Carne, G.; Liserre, M.; Milano, F.; O’Donnell, T. Smart Transformer for the Provision of Coordinated Voltage and Frequency Support in the Grid. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 5574–5579. [Google Scholar]
- De Carne, G.; Buticchi, G.; Liserre, M.; Vournas, C. Real-Time Primary Frequency Regulation using Load Power Control by Smart Transformers. IEEE Trans. Smart Grid 2018, 10, 5630–5639. [Google Scholar] [CrossRef]
- Lopes, J.A.P.; Moreira, C.L.; Madureira, A.G. Defining control strategies for MicroGrids islanded operation. IEEE Trans. Power Syst. 2006, 21, 916–924. [Google Scholar] [CrossRef]
- Eghtedarpour, N.; Farjah, E. Power Control and Management in a Hybrid AC/DC Microgrid. IEEE Trans. Smart Grid 2014, 5, 1494–1505. [Google Scholar] [CrossRef]
- Martinez-Velasco, J.A.; Alepuz, S.; González-Molina, F.; Martin-Arnedo, J. Dynamic average modeling of a bidirectional solid state transformer for feasibility studies and real-time implementation. Electr. Power Syst. Res. 2014, 117, 143–153. [Google Scholar] [CrossRef]
- Ramirez, J.M.; Barrios, R.A.; Salome, B.J. Details and implementation of a SiC-based solid state transformer prototype. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference—Latin America (ISGT Latin America), Quito, Ecuador, 20–22 September 2017; pp. 1–6. [Google Scholar]
- Lagier, T.; Chédot, L.; Ghossein, F.W.L.; Lefebvre, B.; Dworakowski, P.; Mermet-Guyennet, M.; Buttay, C. A 100 kW 1.2 kV 20 kHz DC-DC converter prototype based on the Dual Active Bridge topology. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 20–22 February 2018; pp. 559–564. [Google Scholar]
- Kheraluwala, M.N.; Gascoigne, R.W.; Divan, D.M.; Baumann, E.D. Performance characterization of a high-power dual active bridge DC-to-DC converter. IEEE Trans. Ind. Appl. 1992, 28, 1294–1301. [Google Scholar] [CrossRef]
- Gjelaj, M.; Træholt, C.; Hashemi, S.; Andersen, P.B. DC Fast-charging stations for EVs controlled by a local battery storage in low voltage grids. In Proceedings of the 2017 IEEE Manchester PowerTech, Manchester, UK, 18–22 June 2017; pp. 1–6. [Google Scholar]
- Lucas-Marcillo, K.E.; Plaza Guingla, D.A.; Barra, W.; De Medeiros, R.L.P.; Melo Rocha, E.; Vaca-Benavides, D.A.; Ríos Orellana, S.J.; Herrera Muentes, E.V. Novel Robust Methodology for Controller Design Aiming to Ensure DC Microgrid Stability Under CPL Power Variation. IEEE Access 2019, 7, 64206–64222. [Google Scholar] [CrossRef]
- Lu, X.; Sun, K.; Guerrero, J.M.; Vasquez, J.C.; Huang, L.; Wang, J. Stability Enhancement Based on Virtual Impedance for DC Microgrids With Constant Power Loads. IEEE Trans. Smart Grid 2015, 6, 2770–2783. [Google Scholar] [CrossRef]
- De Carne, G.; Buticchi, G.; Liserre, M.; Vournas, C. Load control using sensitivity identification by means of smart transformer. In Proceedings of the 2017 IEEE Power Energy Society General Meeting, Manchester, UK, 18–22 June 2017; p. 1. [Google Scholar]
- Bayat, M.; Sheshyekani, K.; Hamzeh, M.; Rezazadeh, A. Coordination of Distributed Energy Resources and Demand Response for Voltage and Frequency Support of MV Microgrids. IEEE Trans. Power Syst. 2016, 31, 1506–1516. [Google Scholar] [CrossRef]
- Delille, G.; Yuan, J.; Capely, L. Taking advantage of load voltage sensitivity to stabilize power system frequency. In Proceedings of the 2013 IEEE Grenoble Conference, Grenoble, France, 16–20 June 2013; pp. 1–6. [Google Scholar]
- De Carne, G.; Liserre, M.; Vournas, C. On-Line Load Sensitivity Identification in LV Distribution Grids. IEEE Trans. Power Syst. 2017, 32, 1570–1571. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generation Capacity | 1 GW |
| Total Load | 600 MW/200 MVA |
| Equivalent system Inertia (H) | 2 s |
| Equivalent impedance (seen from MV connection) | 0.02 + j0.232 |
| Nominal Power | 1 MVA |
| Nominal MV AC Voltage (ph-ph) | 15,000 V (RMS) |
| Nominal MV DC link Voltage | 27,000 V |
| Nominal LV DC link Voltage | 720 V |
| Nominal LV AC Voltage (ph-n) | 230 V (RMS) |
| Net Load Scenario | ||||
| Z Cables * | Load | PV Generation ** | EV Charging ** | ESS ** |
| LV AC network | ||||
| 0.01 + j0.003 | 500 kW/220 kvar | −30 kW (−30–0 kW) | - | 0 kW (±30 kW) |
| LV DC network | ||||
| 0.02 | 50 kW/- | −150 kW (−150–0 kW) | 200 kW (0–300 kW) | - |
| MV DC network | ||||
| 0.02 | 150 kW/- | −650 kW (−650–0 kW) | 250 kW (0–400 kW) | - |
| Smart Transformer | ||||
| - | 330 kW/0 kvar *** | - | - | 0 kW (±1 MW) **** |
| Net Generation Scenario | ||||
| Z Cables * | Load | PV Generation ** | EV Charging ** | ESS ** |
| LV AC network | ||||
| 0.01 + j0.003 | 400 kW/220 kvar | −200 kW (−200–0 kW) | - | 0 kW (±30 kW) |
| LV DC network | ||||
| 0.02 | 50 kW/- | −200 kW (−200–0 kW) | 100 kW (0–300 kW) | - |
| MV DC network | ||||
| 0.02 | 150 kW/- | −700 kW (−700–0 kW) | 150 kW (0–400 kW) | - |
| Smart Transformer | ||||
| - | −400 kW / 0 kvar *** | - | - | 0 kW (±1 MW) **** |
| Droop | Slope | Offset (Net Load/Net Generation) | Dead-Band | Limits |
|---|---|---|---|---|
| P()-Local ESS | 5e5 W/Hz | 0 W | 50 ± 0.025 Hz | ±200 kW |
| () | 1 Hz/Hz | 50 Hz | 50 ± 0.025 Hz | ±0.5 Hz |
| ) | 80 V/Hz | 230 V | 50 ± 0.025 Hz | ±25 V |
| VDC() * | 4e3V/Hz | 27 kV | 50 ± 0.025 Hz | ±5 kV |
| P()-ESS | 1e5W/Hz | 0 W | 50 ± 0.025 Hz | ±30 kW |
| P()-PV ** | 2.5SP/fn | −30 kW/−200 kW *** | ±0% | +0/−30% |
| P(VDC)-PV ** | 2.5SP/VDCn | −800 kW/−900 kW *** | ±0% | +0/−10% |
| P(VDC)-EV ** | 2.5SP/VDCn | 450 kW/250 kW *** | ±0% | ±10% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodrigues, J.; Moreira, C.; Lopes, J.P. Smart Transformers as Active Interfaces Enabling the Provision of Power-Frequency Regulation Services from Distributed Resources in Hybrid AC/DC Grids. Appl. Sci. 2020, 10, 1434. https://doi.org/10.3390/app10041434
Rodrigues J, Moreira C, Lopes JP. Smart Transformers as Active Interfaces Enabling the Provision of Power-Frequency Regulation Services from Distributed Resources in Hybrid AC/DC Grids. Applied Sciences. 2020; 10(4):1434. https://doi.org/10.3390/app10041434
Chicago/Turabian StyleRodrigues, Justino, Carlos Moreira, and João Peças Lopes. 2020. "Smart Transformers as Active Interfaces Enabling the Provision of Power-Frequency Regulation Services from Distributed Resources in Hybrid AC/DC Grids" Applied Sciences 10, no. 4: 1434. https://doi.org/10.3390/app10041434
APA StyleRodrigues, J., Moreira, C., & Lopes, J. P. (2020). Smart Transformers as Active Interfaces Enabling the Provision of Power-Frequency Regulation Services from Distributed Resources in Hybrid AC/DC Grids. Applied Sciences, 10(4), 1434. https://doi.org/10.3390/app10041434