A Low-Cost, Small-Size, and Bluetooth-Connected Module to Detect Faults in Rolling Bearings


Abstract
1. Introduction
2. Evaluation of the Frequency Spectrum
2.1. Fundamental Frequencies of Rolling Bearings
2.2. Optimized Discrete Fast Fourier Transform
- Step 1 The windowing function, which was previously evaluated for the samples and stored in the array, is multiplied by the input sequence of the sampled data, resulting in the output array.
- Step 2 The even components of are placed in the real part of , and the odd ones in the imaginary part, so that is a complex data array of length .
- Step 3 The standard Cooley–Tukey radix-2 transform [25] is evaluated on the basis of the array, resulting in . It is worth noticing that the length of the input sequence is , which is one only half of the original input sequence ().
- Step 4 Real and imaginary parts have to be recombined together to reconstruct the samples of the positive frequency spectrum aswhere and are the real part and the imaginary part of the coefficients evaluated from the twiddle factors (), respectively, as
- Step 5 The amplitude of the frequency spectrum can be evaluated, eventually. Such an array has to be multiply by the inverse of the coherent gain of the exploited windowing function.
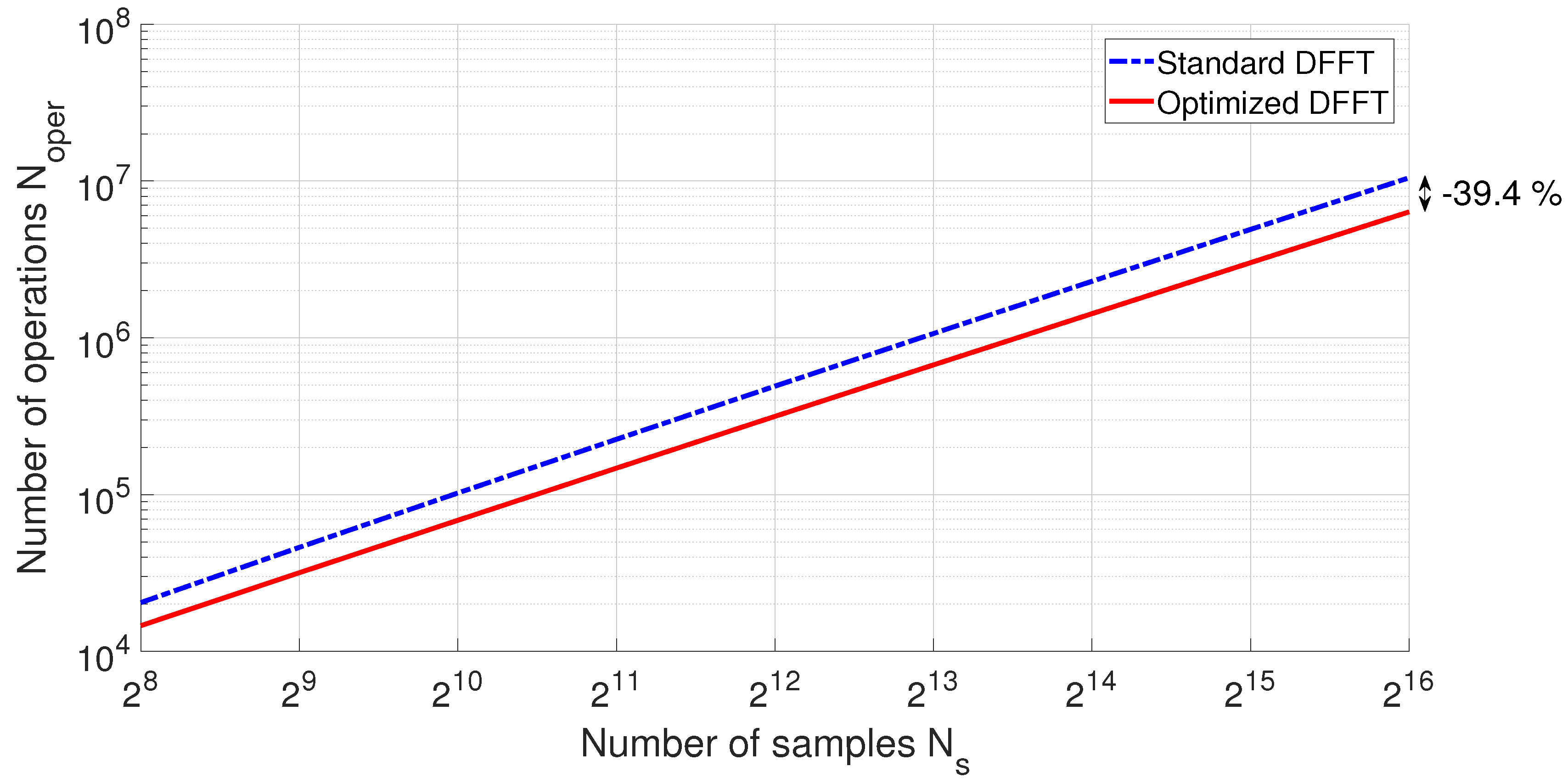
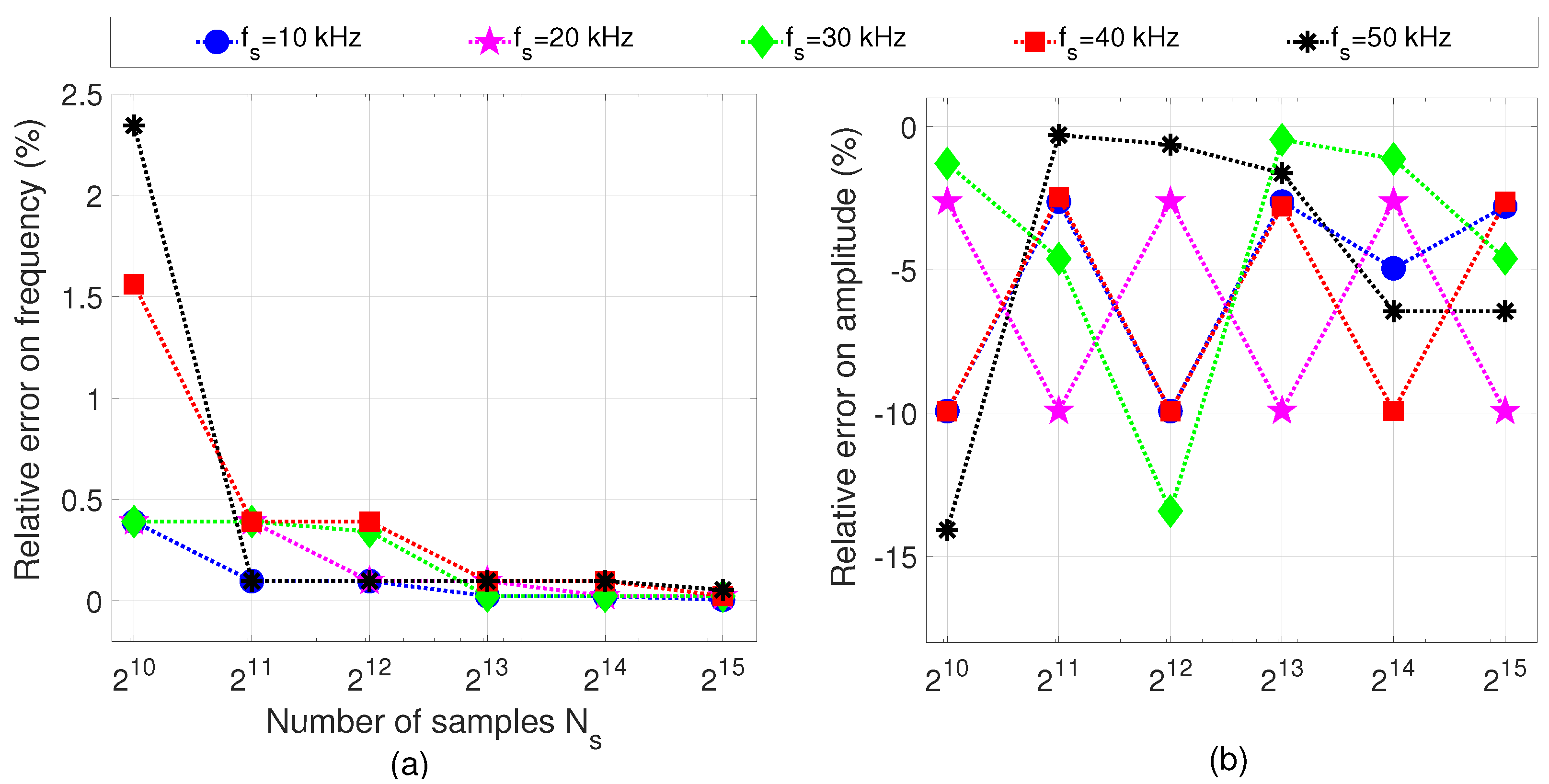
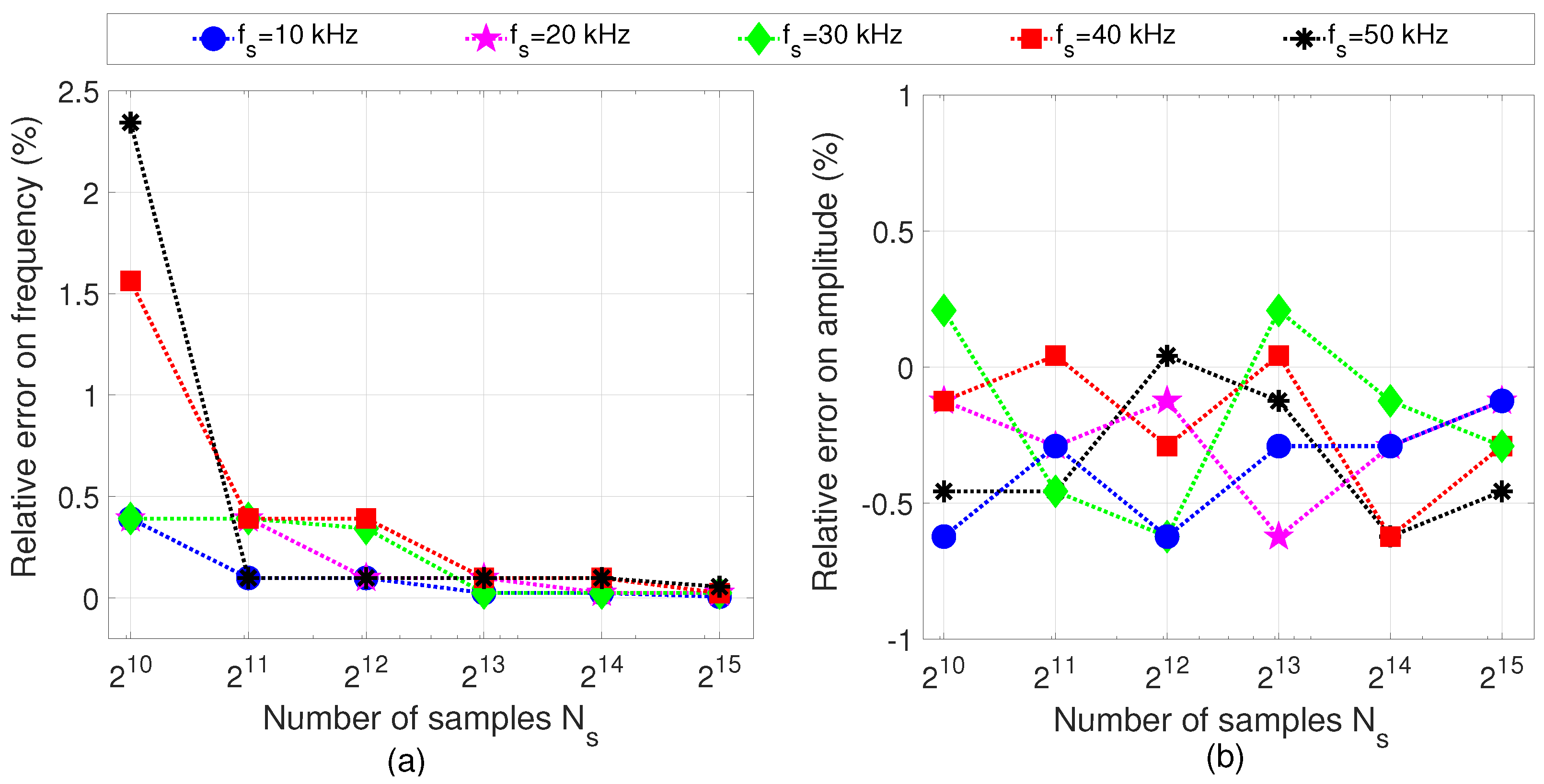
2.3. Comparison with Standard Algorithm
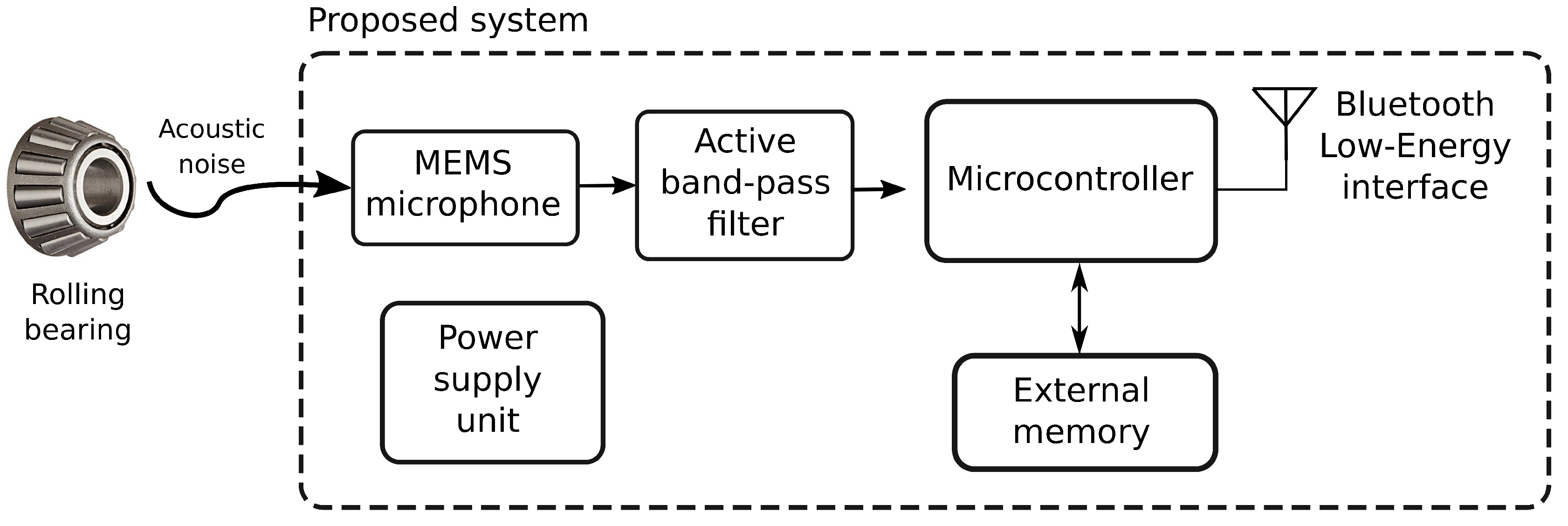
3. Proposed Solution
3.1. Signal Conditioning and Data Acquisition
3.2. Frequency Spectrum Evaluation
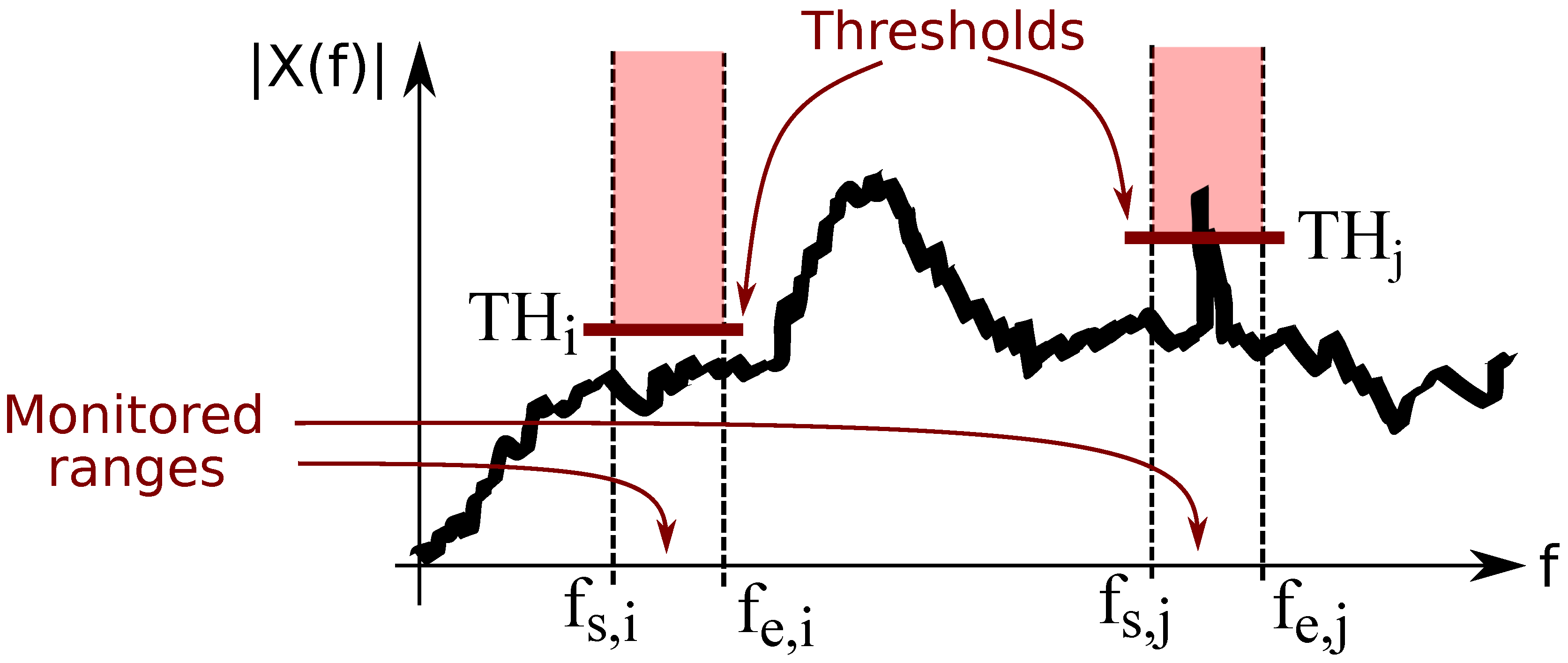
3.3. Detection Algorithm
3.4. Bluetooth Low-Energy Interface
4. Results and Discussion
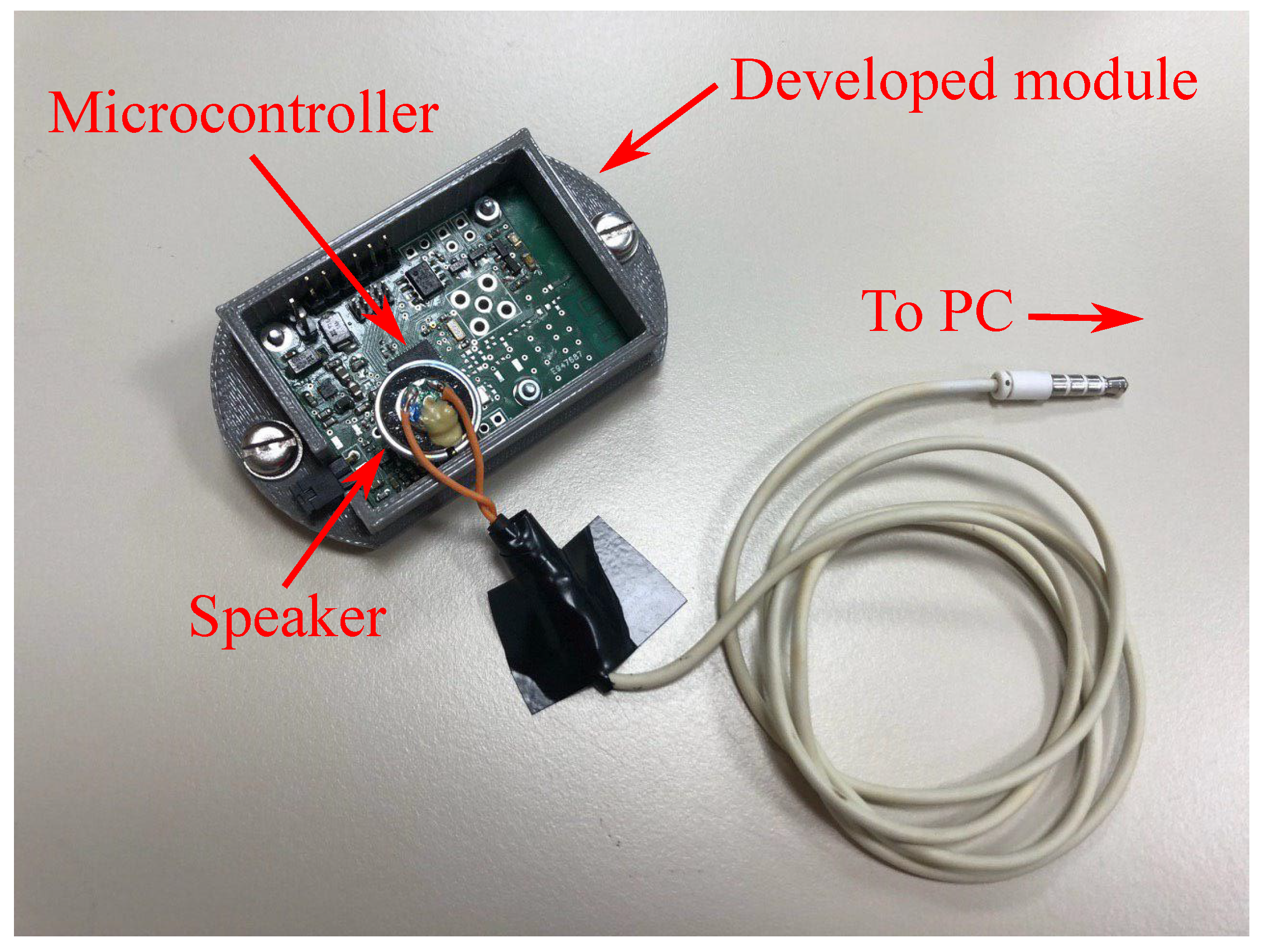
4.1. Proposed Prototype
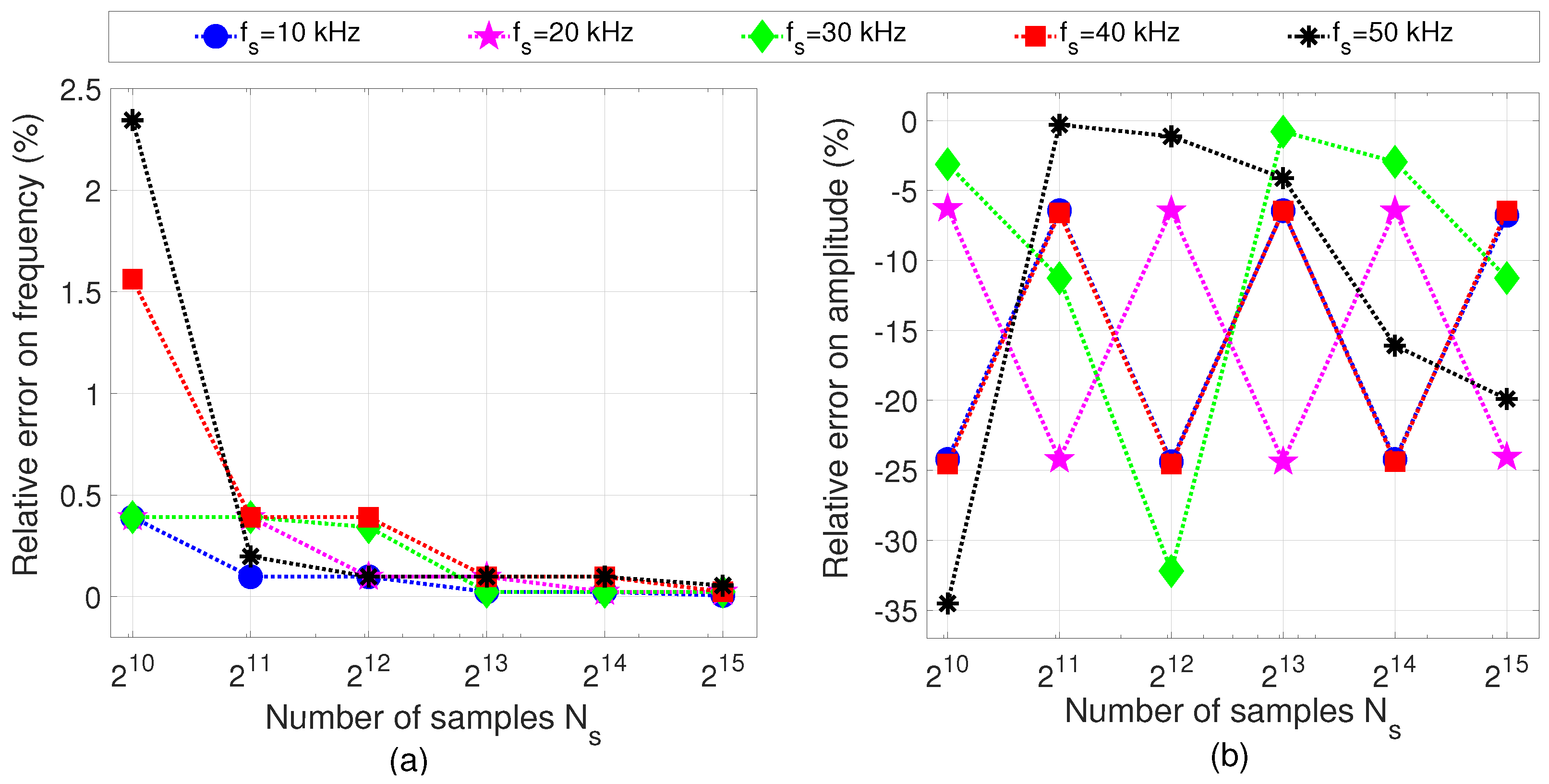
4.2. FFT Accuracy
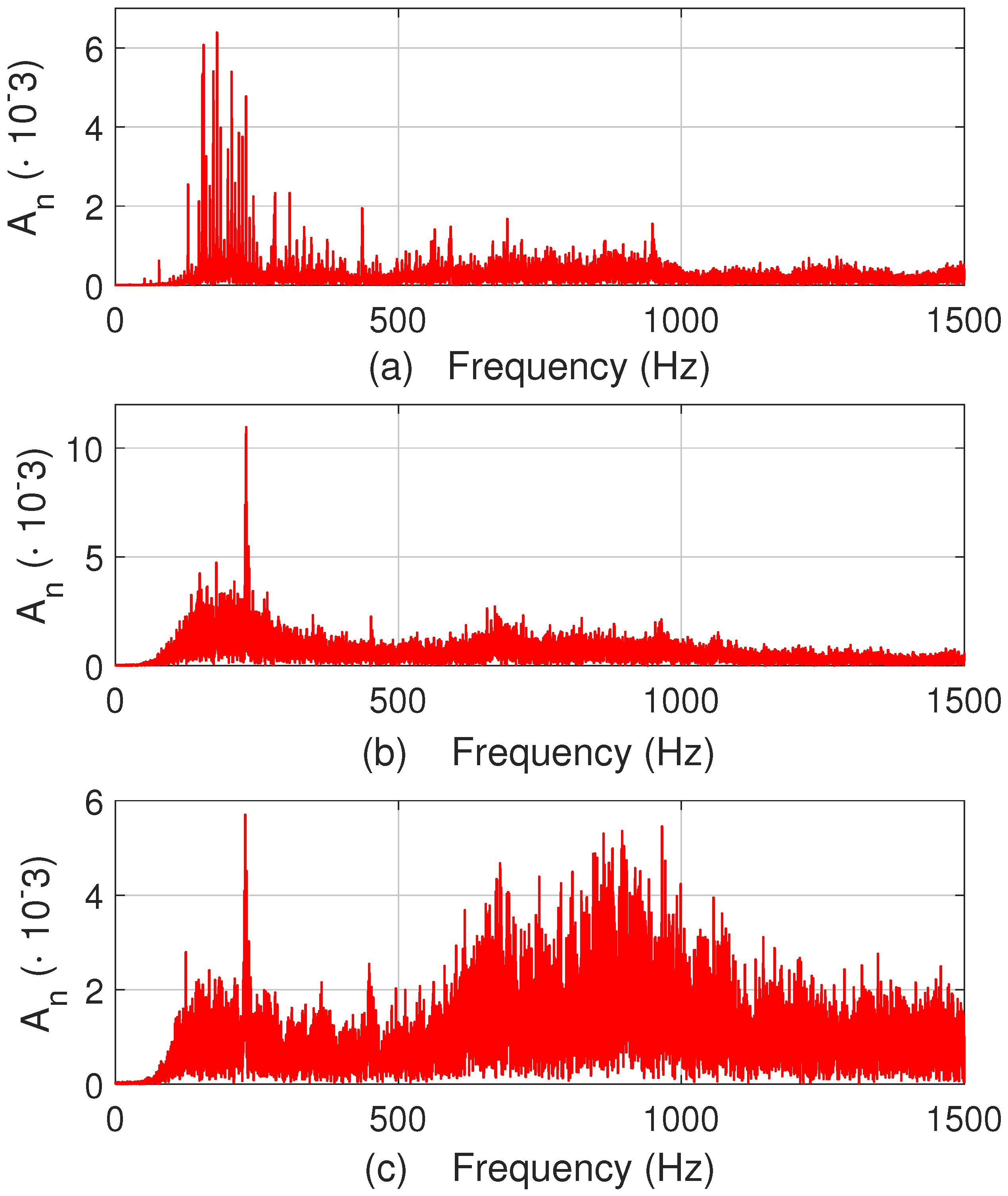
4.3. The Environmental Noise
4.4. Two Tones Plus the Environmental Noise
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Holbert, K.E.; Lin, K.; Karady, G.G. Enhacement of electric motor reliability through condition monitoring. In Proceedings of the 5th IFAC Symposium on Power Plants and Power Systems Control, Kananaskis, AB, Canada, 25–28 June 2006; Volume 39, pp. 255–260. [Google Scholar] [CrossRef]
- Caesarendra, W.; Kosasih, B.; Tieu, A.K.; Zhu, H.; Moodie, C.A.; Zhu, Q. Acoustic emission-based condition monitoring methods: Review and application for low speed slew bearing. Mech. Syst. Signal Process. 2016, 72–73, 134–159. [Google Scholar] [CrossRef]
- Wang, D.; Tsui, K.; Miao, Q. Prognostics and Health Management: A Review of Vibration Based Bearing and Gear Health Indicators. IEEE Access 2018, 6, 665–676. [Google Scholar] [CrossRef]
- Azeez, N.I.; Alex, A.C. Detection of rolling element bearing defects by vibration signature analysis: A review. In Proceedings of the 2014 Annual International Conference on Emerging Research Areas: Magnetics, Machines and Drives (AICERA/iCMMD), Kerala, India, 24–26 July 2014; pp. 1–5. [Google Scholar]
- Piltan, F.; Prosvirin, A.E.; Jeong, I.; Im, K.; Kim, J.M. Rolling-Element Bearing Fault Diagnosis Using Advanced Machine Learning-Based Observer. Appl. Sci. 2019, 9, 5404. [Google Scholar] [CrossRef]
- Wang, J.; Wang, J.; Du, W.; Zhang, J.; Wang, Z.; Wang, G.; Li, T. Application of a New Enhanced Deconvolution Method in Gearbox Fault Diagnosis. Appl. Sci. 2019, 9, 5313. [Google Scholar] [CrossRef]
- Hou, J.; Wu, Y.; Gong, H.; Ahmad, A.S.; Liu, L. A Novel Intelligent Method for Bearing Fault Diagnosis Based on EEMD Permutation Entropy and GG Clustering. Appl. Sci. 2020, 10, 386. [Google Scholar] [CrossRef]
- Hebda-Sobkowicz, J.; Zimroz, R.; Wyłomańska, A. Selection of the Informative Frequency Band in a Bearing Fault Diagnosis in the Presence of Non-Gaussian Noise—Comparison of Recently Developed Methods. Appl. Sci. 2020, 10, 2657. [Google Scholar] [CrossRef]
- Lees, A.W.; Quiney, Z.; Ganji, A.; Murray, B. The use of acoustic emission for bearing condition monitoring. J. Phys. Conf. Ser. 2011, 305, 012074. [Google Scholar] [CrossRef]
- Kilundu, B.; Chiementin, X.; Duez, J.; Mba, D. Cyclostationarity of Acoustic Emissions (AE) for monitoring bearing defects. Mech. Syst. Signal Process. 2011, 25, 2061–2072. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.M. Bearing Fault Diagnosis Using Grad-CAM and Acoustic Emission Signals. Appl. Sci. 2020, 10, 2050. [Google Scholar] [CrossRef]
- Orman, M.; Rzeszucinski, P.; Tkaczyk, A.; Krishnamoorthi, K.; Pinto, C.; Sułowicz, M. Bearing Fault Detection with the Use of Acoustic Signals Recorded by a Hand-Held Mobile Phone. In Proceedings of the International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), Bangalore, India, 10–12 December 2015; pp. 252–256. [Google Scholar] [CrossRef]
- Rubio, E.; Jáuregui, J.C. Experimental characterization of mechanical vibrations and acoustical noise generated by defective automotive wheel hub bearings. Procedia Eng. 2012, 35, 176–181. [Google Scholar] [CrossRef]
- Lee, C.Y.; Huang, K.Y.; Hsieh, Y.H.; Chen, P.H. Optimal Intrinsic Mode Function Based Detection of Motor Bearing Damages. Appl. Sci. 2019, 9, 2587. [Google Scholar] [CrossRef]
- Liu, W.; Zhao, T.; He, D.; Liu, D. DSP based module for processing vibration signals of rotation machinery. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017; pp. 1–6. [Google Scholar]
- Kang, M.; Kim, J.; Jeong, I.; Kim, J.; Pecht, M. A Massively Parallel Approach to Real-Time Bearing Fault Detection Using Sub-Band Analysis on an FPGA-Based Multicore System. IEEE Trans. Ind. Electron. 2016, 63, 6325–6335. [Google Scholar] [CrossRef]
- Jagannath, V.M.D.; Raman, B. WiBeaM: Wireless Bearing Monitoring System. In Proceedings of the 2007 2nd International Conference on Communication Systems Software and Middleware, Bangalore, India, 7–12 January 2007; pp. 1–8. [Google Scholar]
- Esfahani, E.T.; Wang, S.; Sundararajan, V. Multisensor Wireless System for Eccentricity and Bearing Fault Detection in Induction Motors. IEEE/ASME Trans. Mechatron. 2014, 19, 818–826. [Google Scholar] [CrossRef]
- Ramalingam, I.; Annamalai, S.; Vaithiyanathan, S. Fault diagnosis of wind turbine bearing using wireless sensor networks. Therm. Sci. 2017, 21, 523–531. [Google Scholar] [CrossRef][Green Version]
- Lu, S.; Zhou, P.; Wang, X.; Liu, Y.; Liu, F.; Zhao, J. Condition monitoring and fault diagnosis of motor bearings using undersampled vibration signals from a wireless sensor network. J. Sound Vib. 2018, 414, 81–96. [Google Scholar] [CrossRef]
- Huang, Q.; Tang, B.; Deng, L.; Wang, J. A divide-and-compress lossless compression scheme for bearing vibration signals in wireless sensor networks. Measurement 2015, 67, 51–60. [Google Scholar] [CrossRef]
- Feng, G.; Zhao, H.; Gu, F.; Needham, P.; Ball, A. Efficient implementation of envelope analysis on resources limited wireless sensor nodes for accurate bearing fault diagnosis. Measurement 2017, 110, 307–318. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Brandlein, J.; Eschmann, P.; Hasbargen, L.; Weigand, K.B. Ball and Roller Bearings: Theory, Design and Application; Wiley: Hoboken, NJ, USA, 1999. [Google Scholar]
- Kumar, B.P. Digital Signal Processing Laboratory; Taylor and Francis Group: Abingdon, UK, 2010. [Google Scholar]
- Soni, M.; Kunthe, P. A General Comparison of FFT Algorithms. Pioneer Journal of IT and Management. 2011. Available online: http://pioneerjournal.in/conferences/tech-knowledge/12th-national-conference/3625-a-general-comparison-of-fft-algorithms.html (accessed on 13 August 2020).
- Sundararajan, D. The Discrete Fourier Transform; World Scientific: Singapore, 2001; Available online: https://www.worldscientific.com/doi/pdf/10.1142/4610 (accessed on 30 June 2020).
- Harris, F.J. On the use of windows for harmonic analysis with the discrete Fourier transform. Proc. IEEE 1978, 66, 51–83. [Google Scholar] [CrossRef]
- ARM. Cortex™-M3, Technical Reference Manual; ARM: Cambridge, UK, 2005. [Google Scholar]
- Bluetooth Special Interest Group. Bluetooth Core Specification; Bluetooth Special Interest Group: Kirkland, WA, USA, 2019. [Google Scholar]
- NTN Bearing Corporation. 4T-30207 Tapered Roller Bearing; NTN Bearing Corporation: Osaka, Japan, 2015. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Sampling frequency () | 100 Hz to 50 kHz |
| Number of samples () | 256–65832 |
| Windowing function | No window, Hann-2, Hann-4, top flat, Blackman |
| How often acquire and process signal | 30 s to 100 min |
| Parameters of i-th range |
| Characteristic | Size |
|---|---|
| Configuration | 12 bytes |
| Command | 3 bytes |
| Range setup | 6 bytes for range, maximum 21 ranges |
| Over-threshold peaks | 6 bytes for peak, maximum 21 peaks |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raviola, E.; Fiori, F. A Low-Cost, Small-Size, and Bluetooth-Connected Module to Detect Faults in Rolling Bearings. Appl. Sci. 2020, 10, 5645. https://doi.org/10.3390/app10165645
Raviola E, Fiori F. A Low-Cost, Small-Size, and Bluetooth-Connected Module to Detect Faults in Rolling Bearings. Applied Sciences. 2020; 10(16):5645. https://doi.org/10.3390/app10165645
Chicago/Turabian StyleRaviola, Erica, and Franco Fiori. 2020. "A Low-Cost, Small-Size, and Bluetooth-Connected Module to Detect Faults in Rolling Bearings" Applied Sciences 10, no. 16: 5645. https://doi.org/10.3390/app10165645
APA StyleRaviola, E., & Fiori, F. (2020). A Low-Cost, Small-Size, and Bluetooth-Connected Module to Detect Faults in Rolling Bearings. Applied Sciences, 10(16), 5645. https://doi.org/10.3390/app10165645