Numerical Study on the Phase Sensitivity Variation in Low Frequency Primary Microphone Calibrations

Abstract
1. Introduction
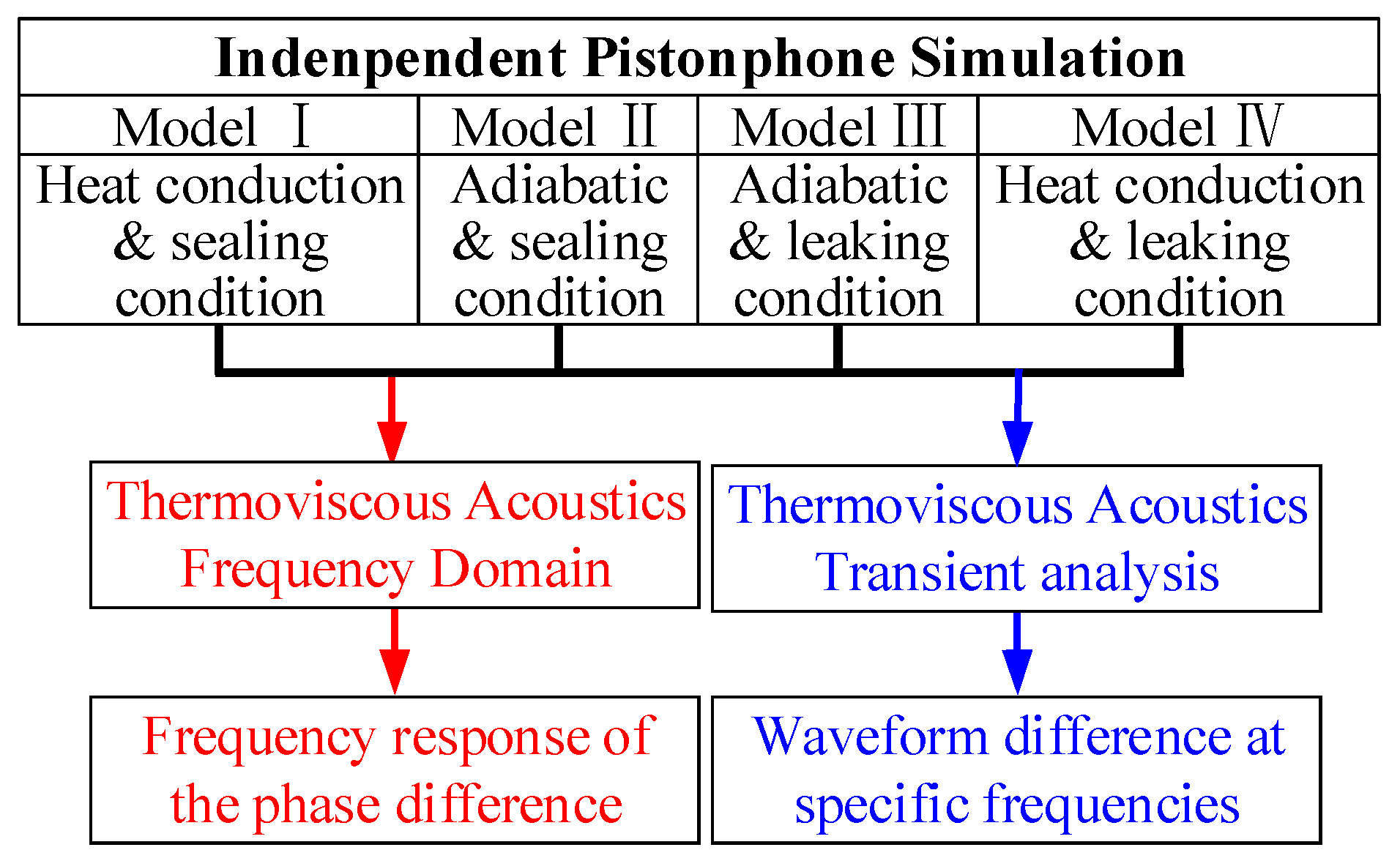
2. Independent Pistonphone Simulation
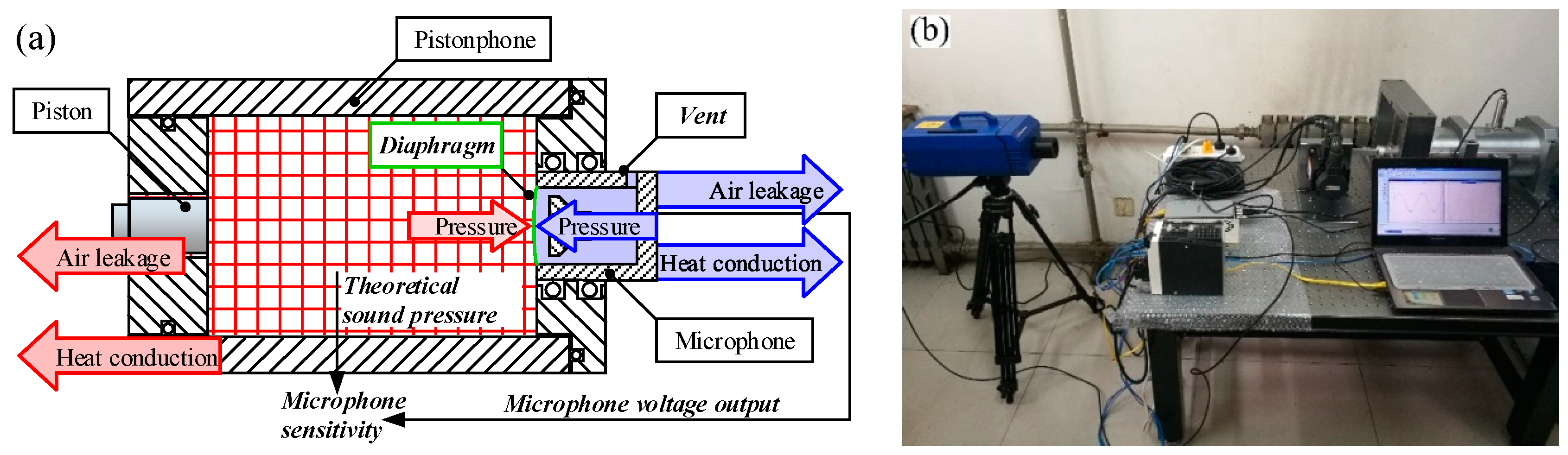
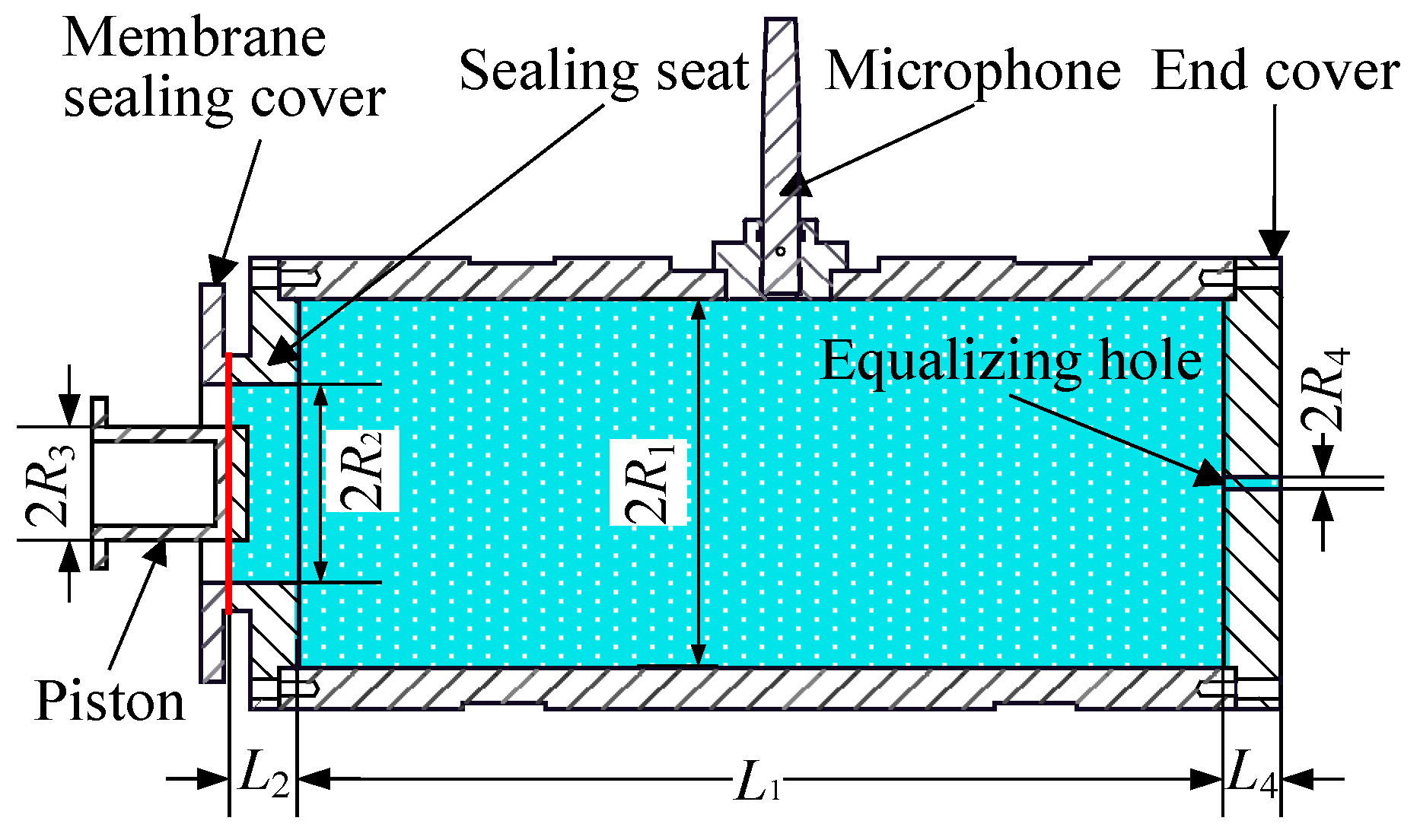
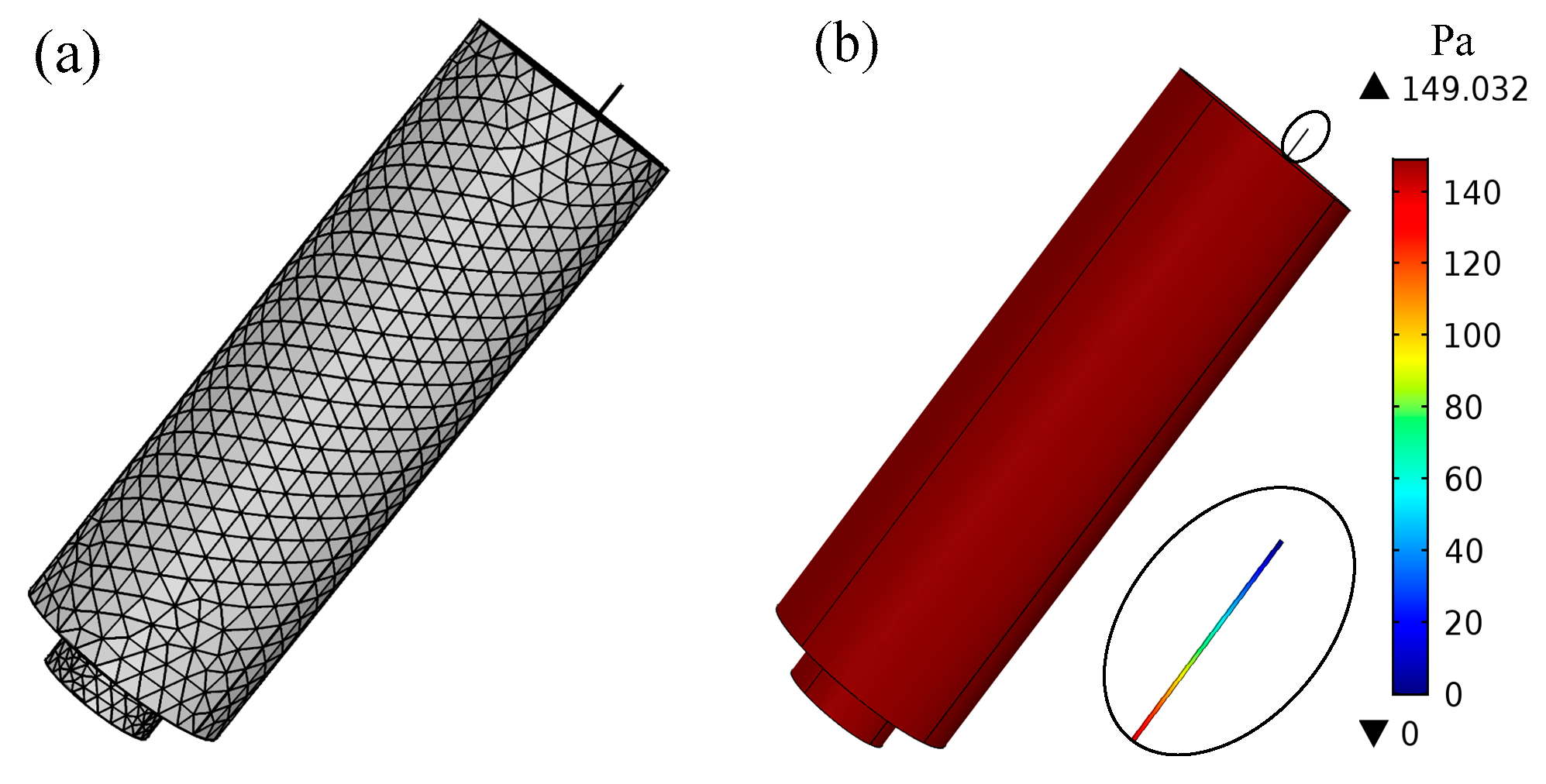
2.1. Model Description
2.2. Results
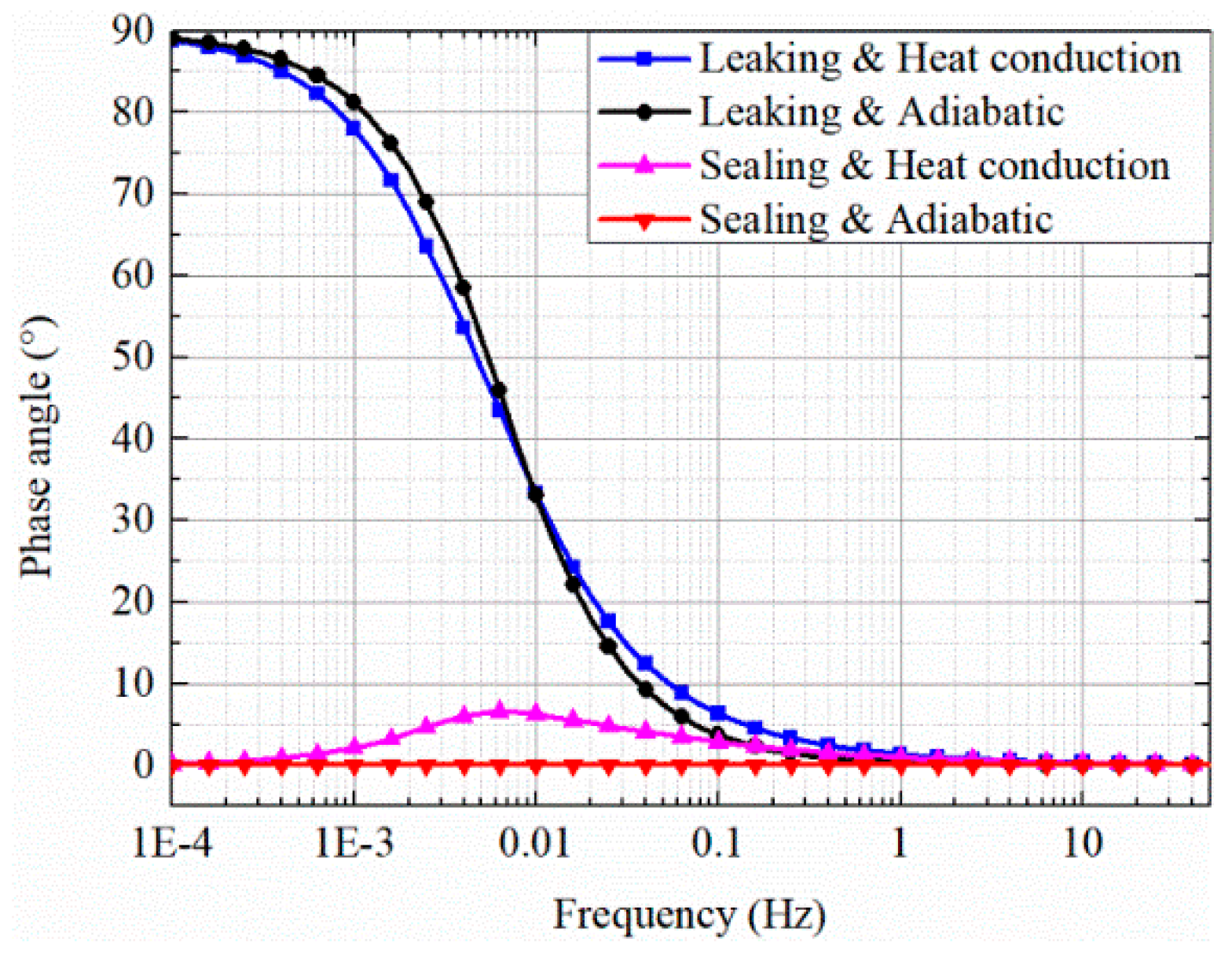
2.2.1. Results in Frequency Domain
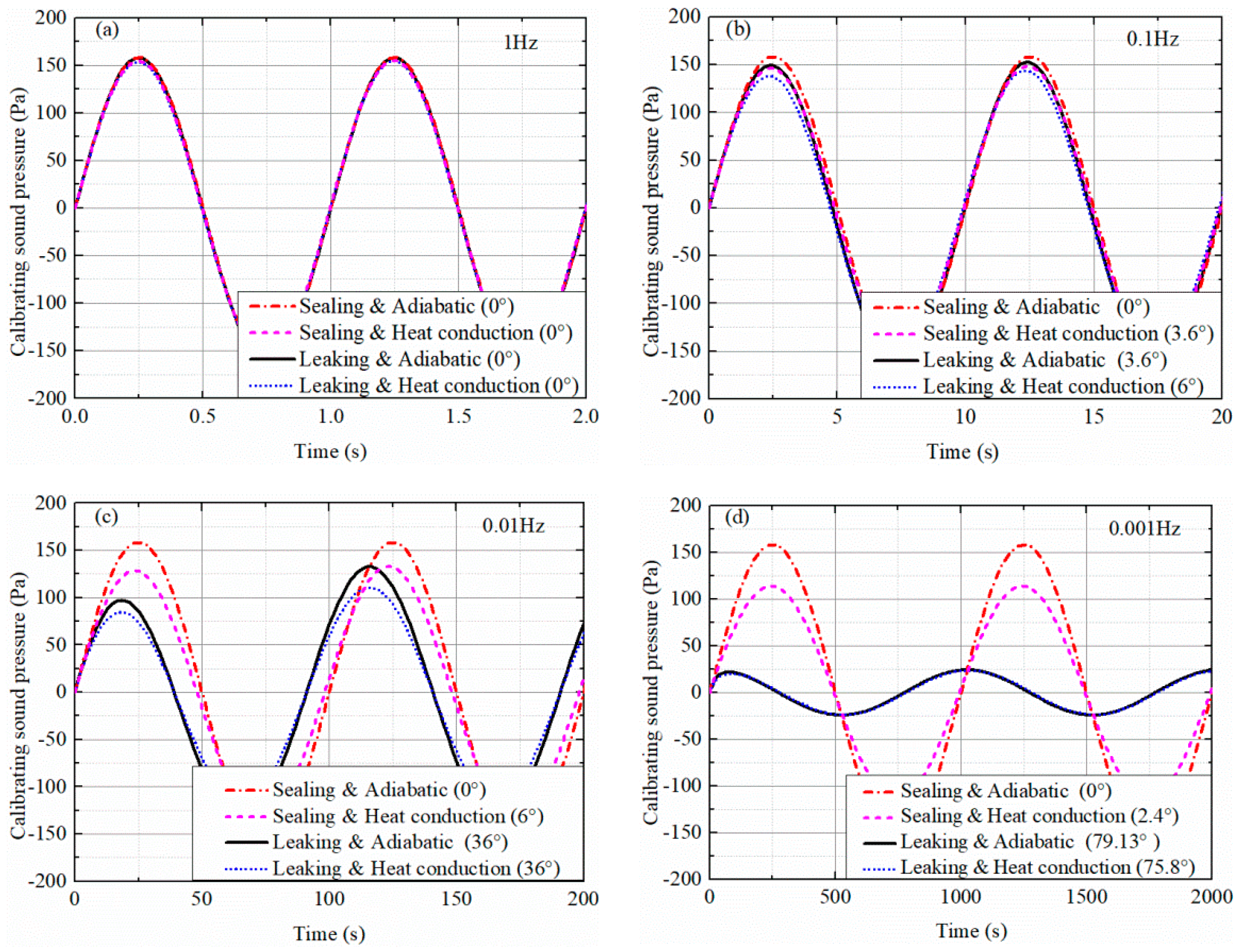
2.2.2. Results in Time Domain
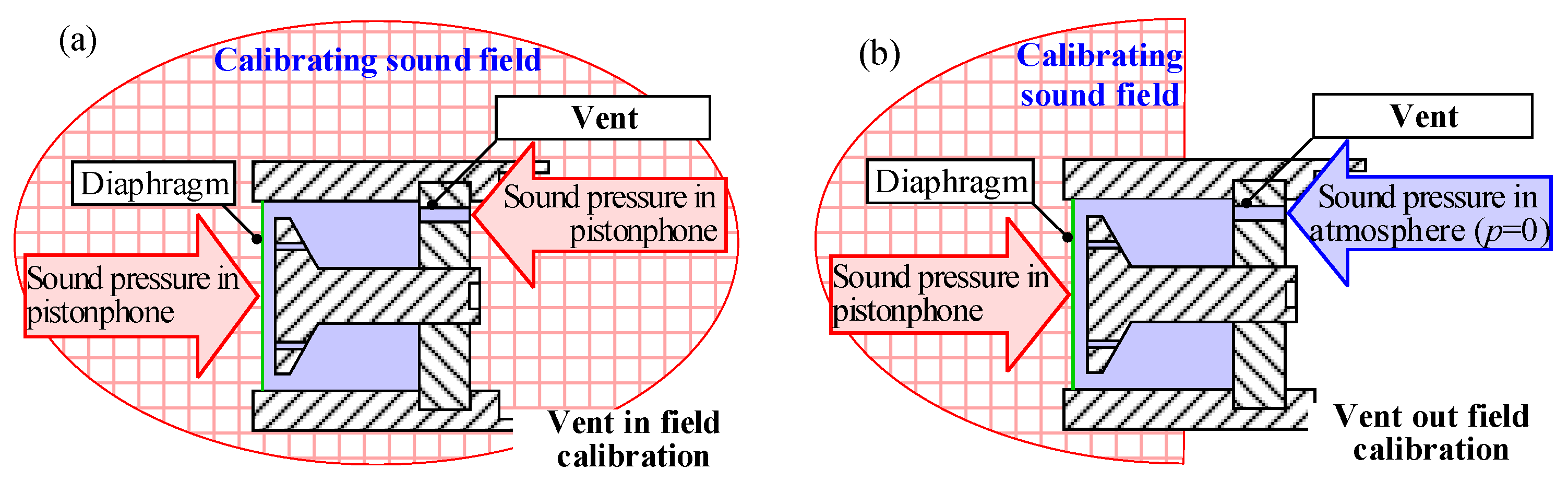
3. Independent Microphone Simulation
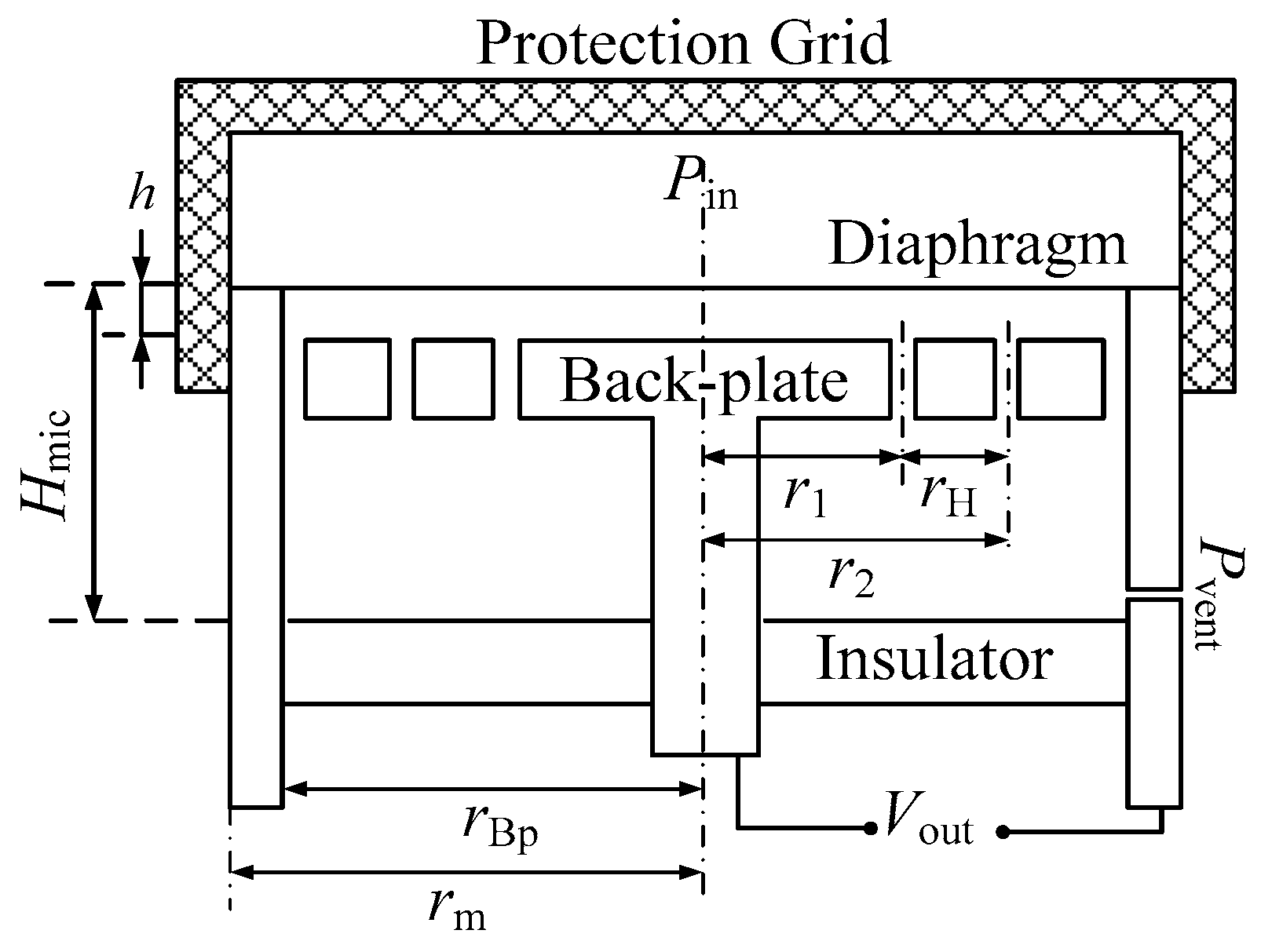
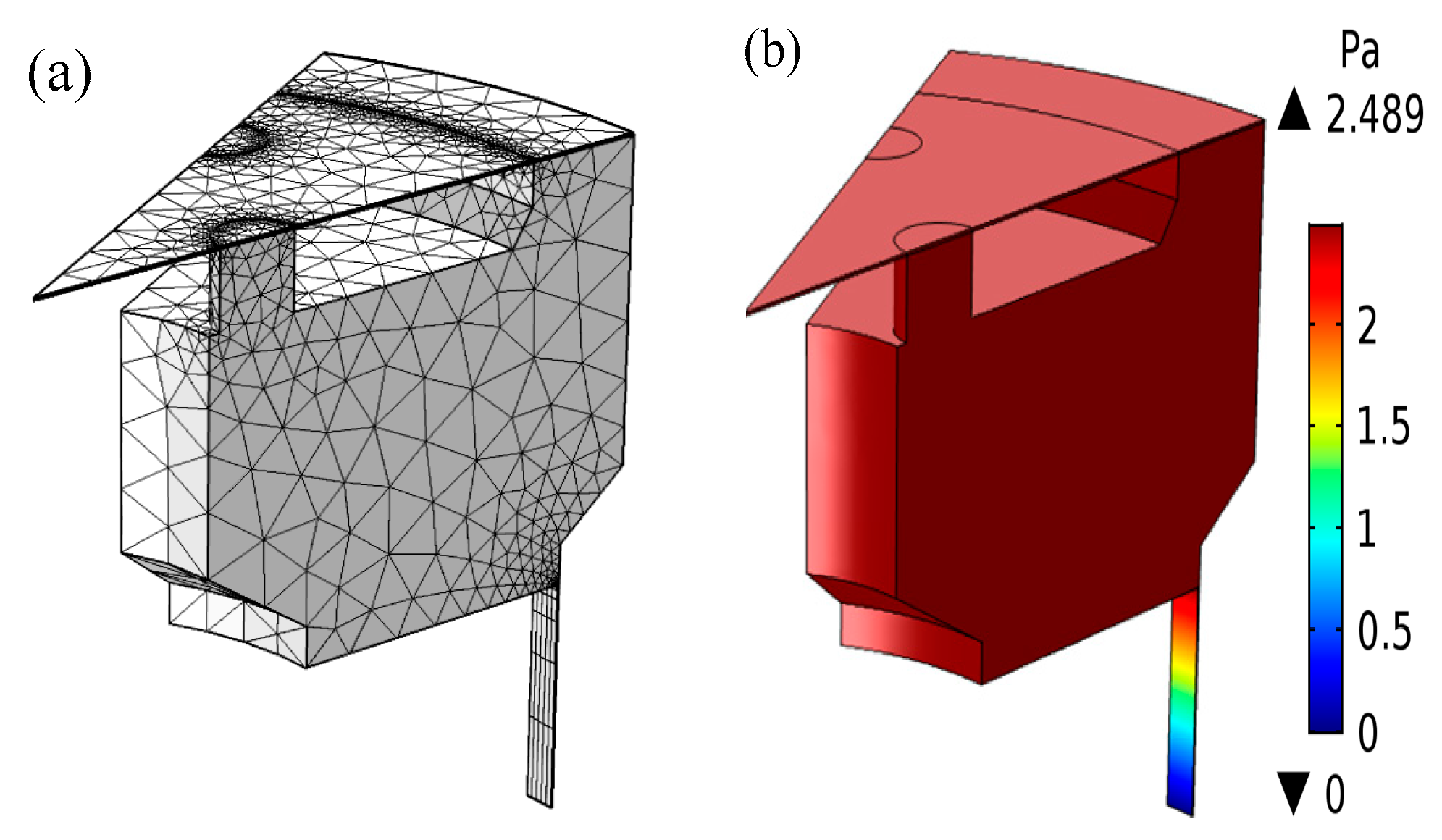
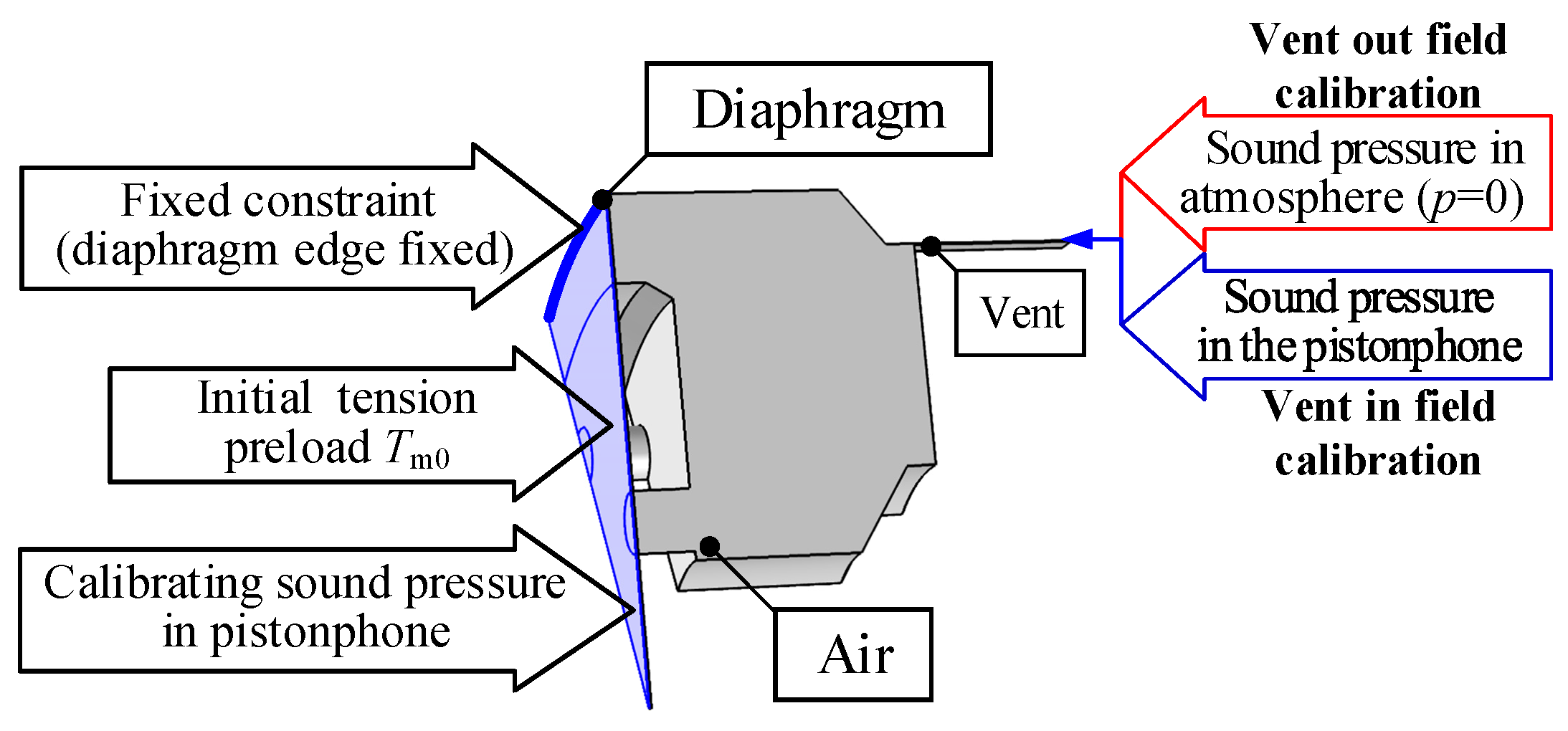
3.1. Model Description
3.2. Results
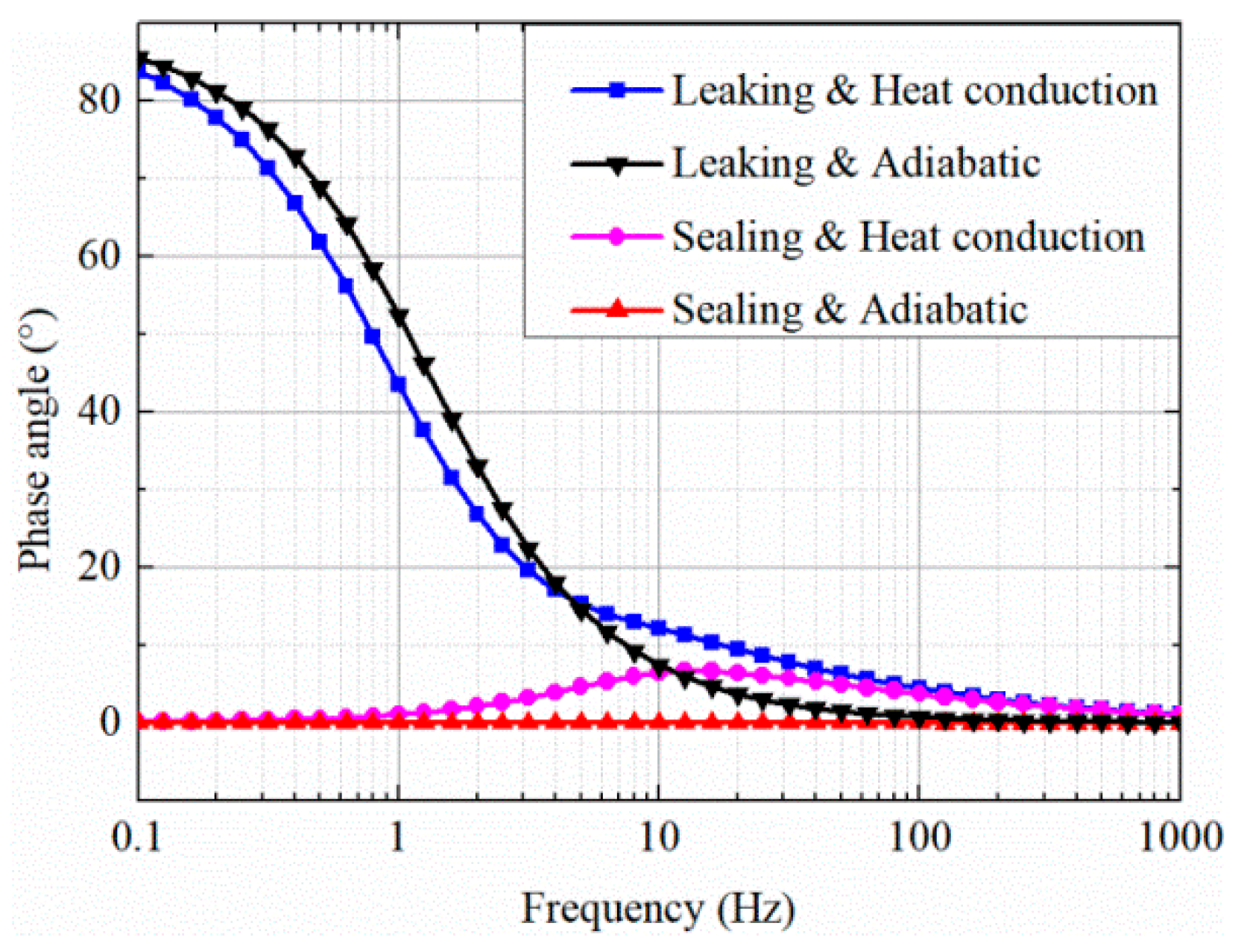
3.2.1. Results in Frequency Domain
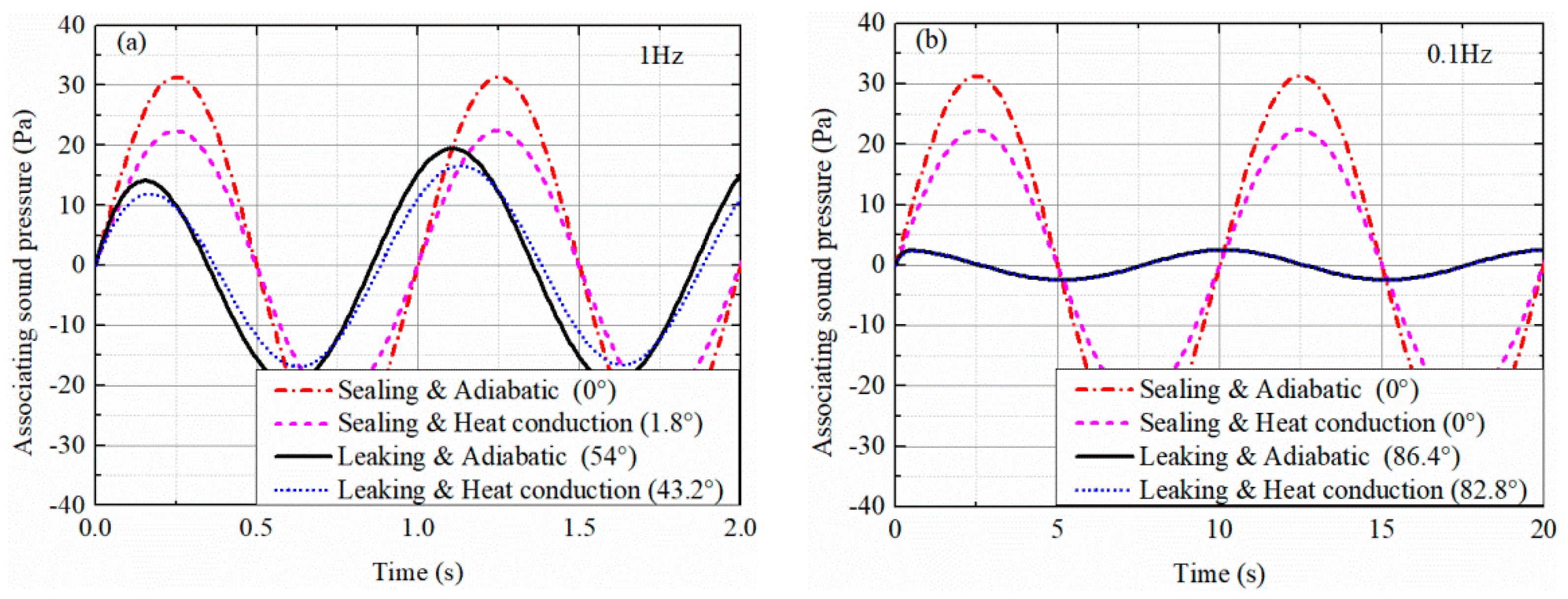
3.2.2. Results in Time Domain
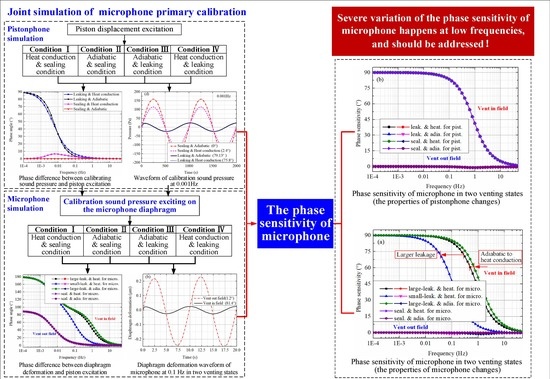
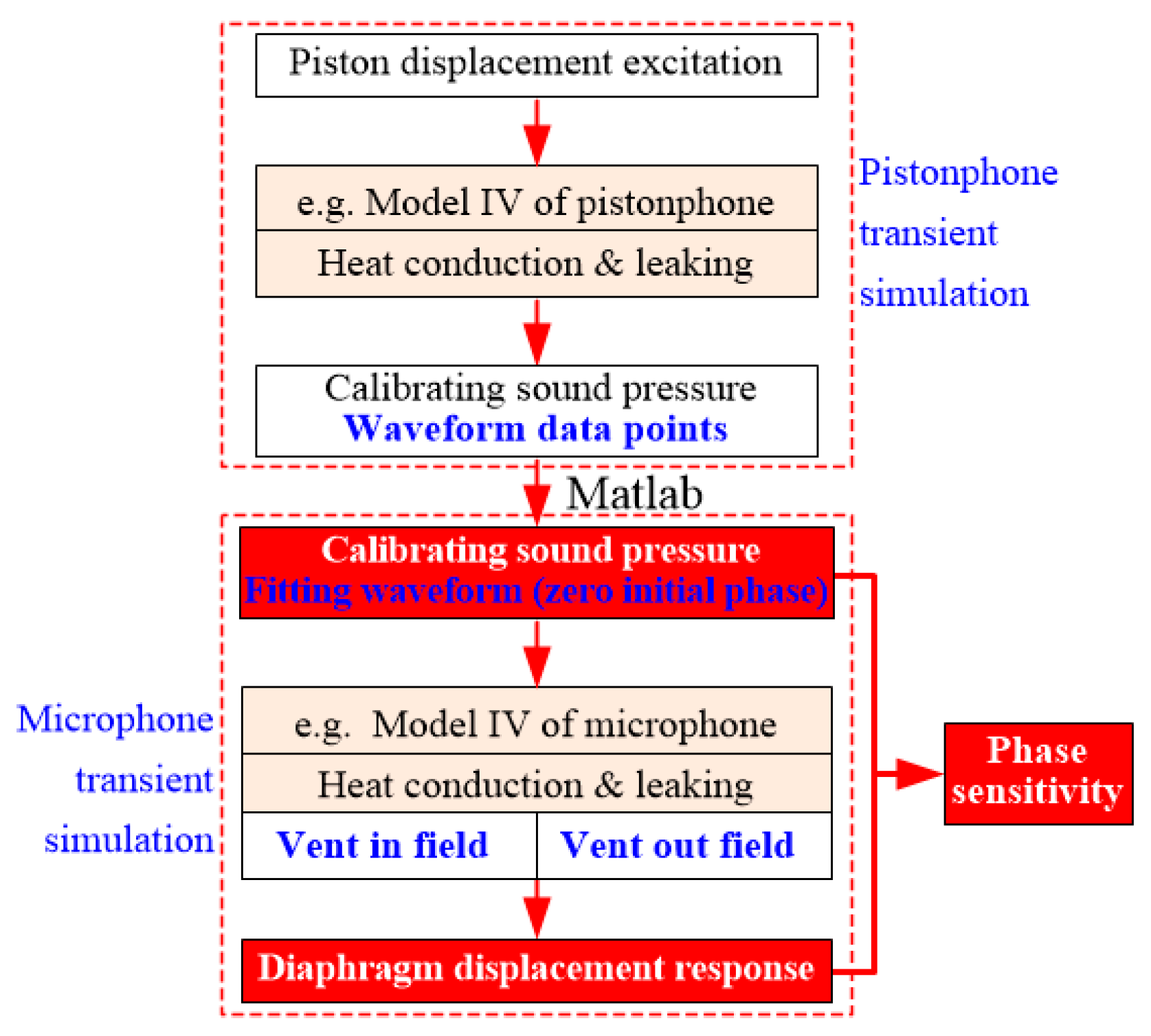
4. Joint Simulation of the Calibration Process
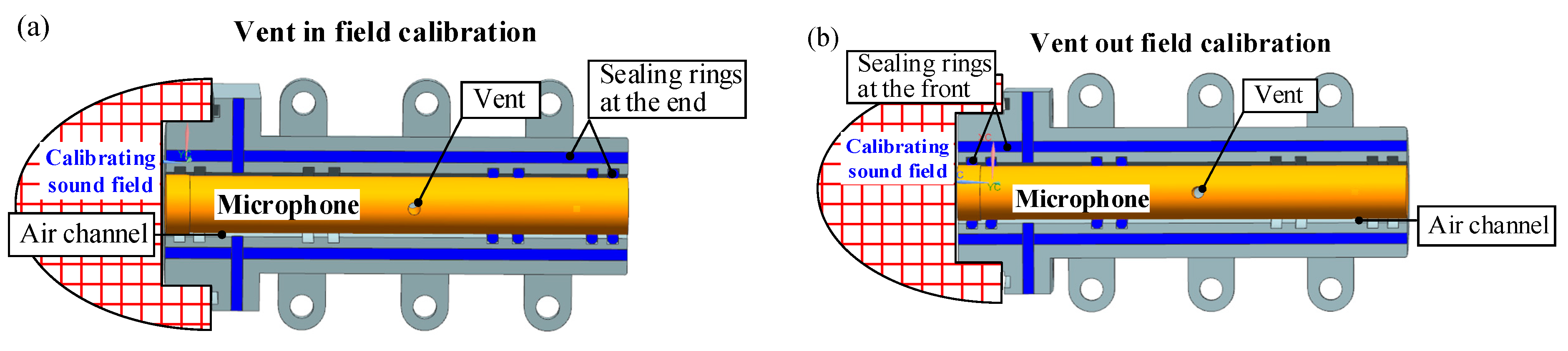
4.1. Model Description
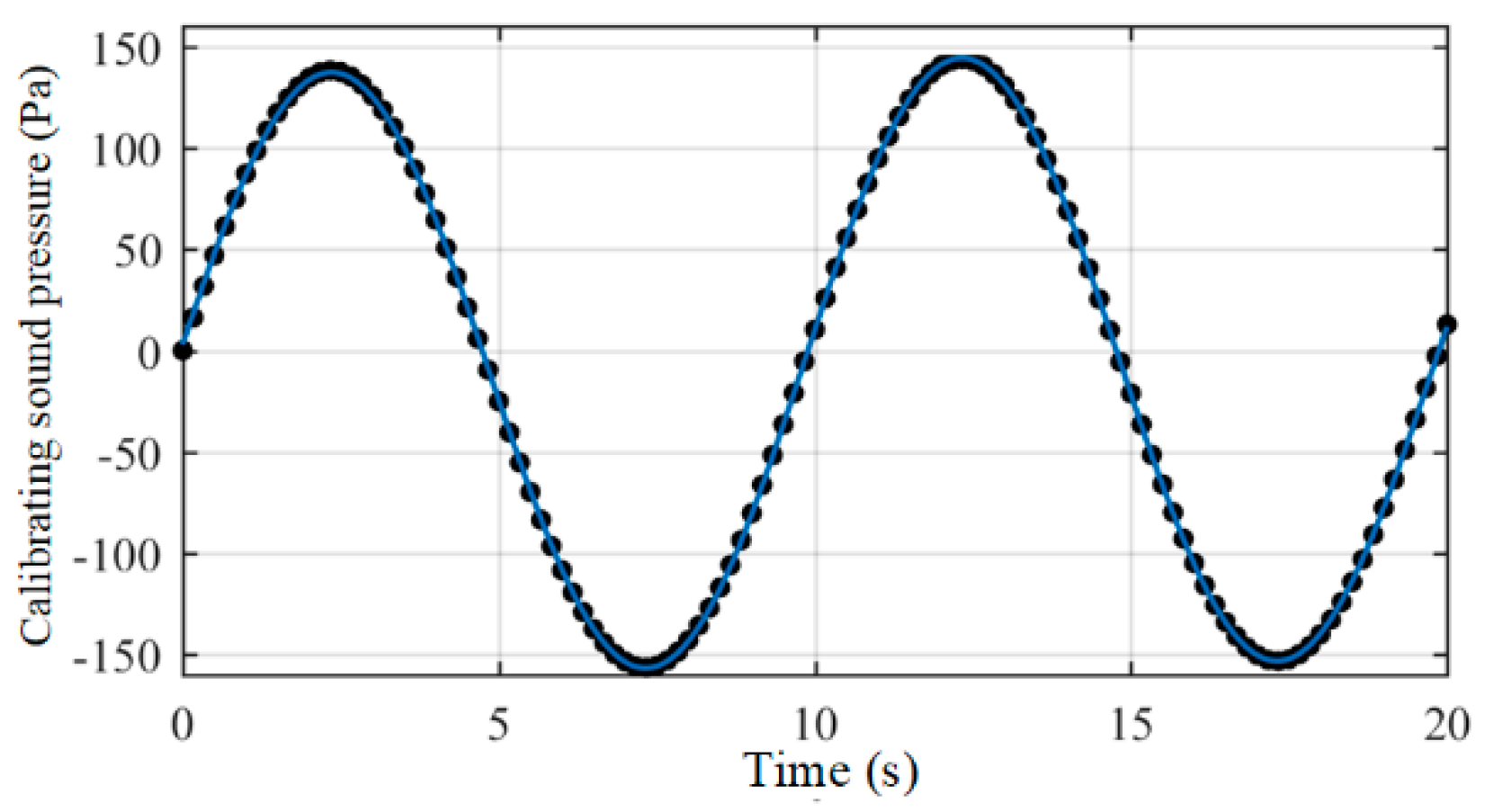
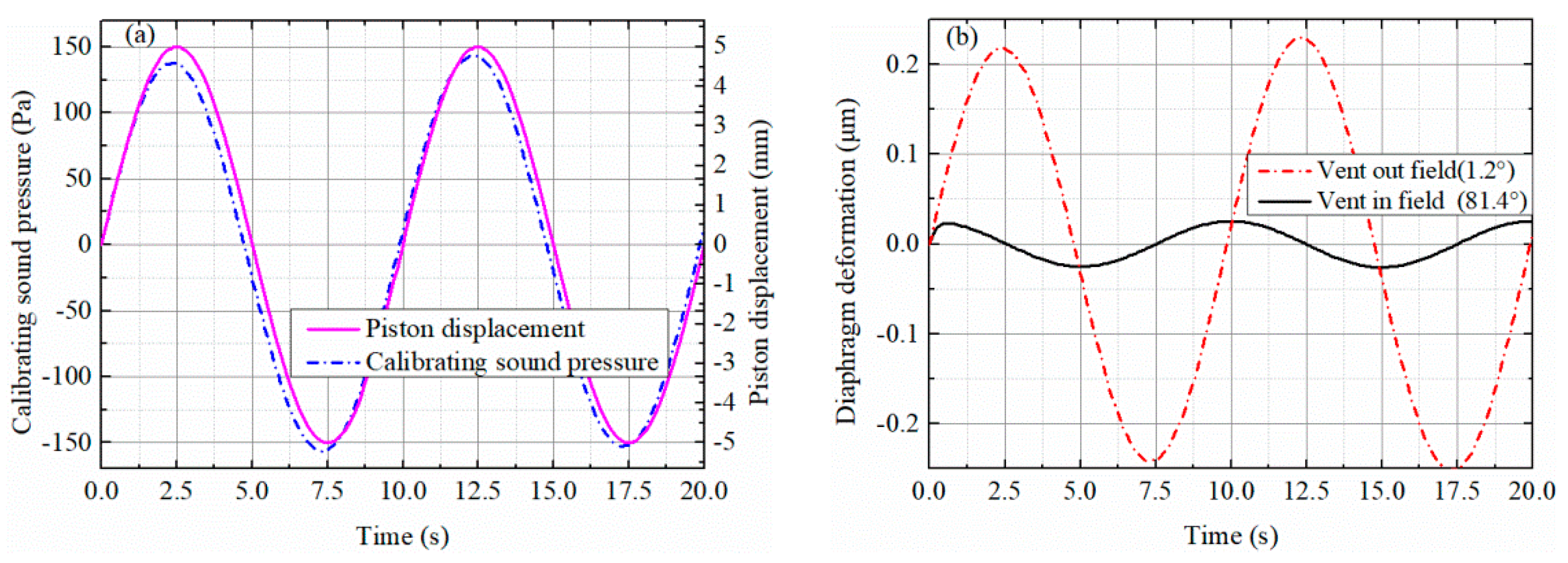
4.2. Time Domain Simulation
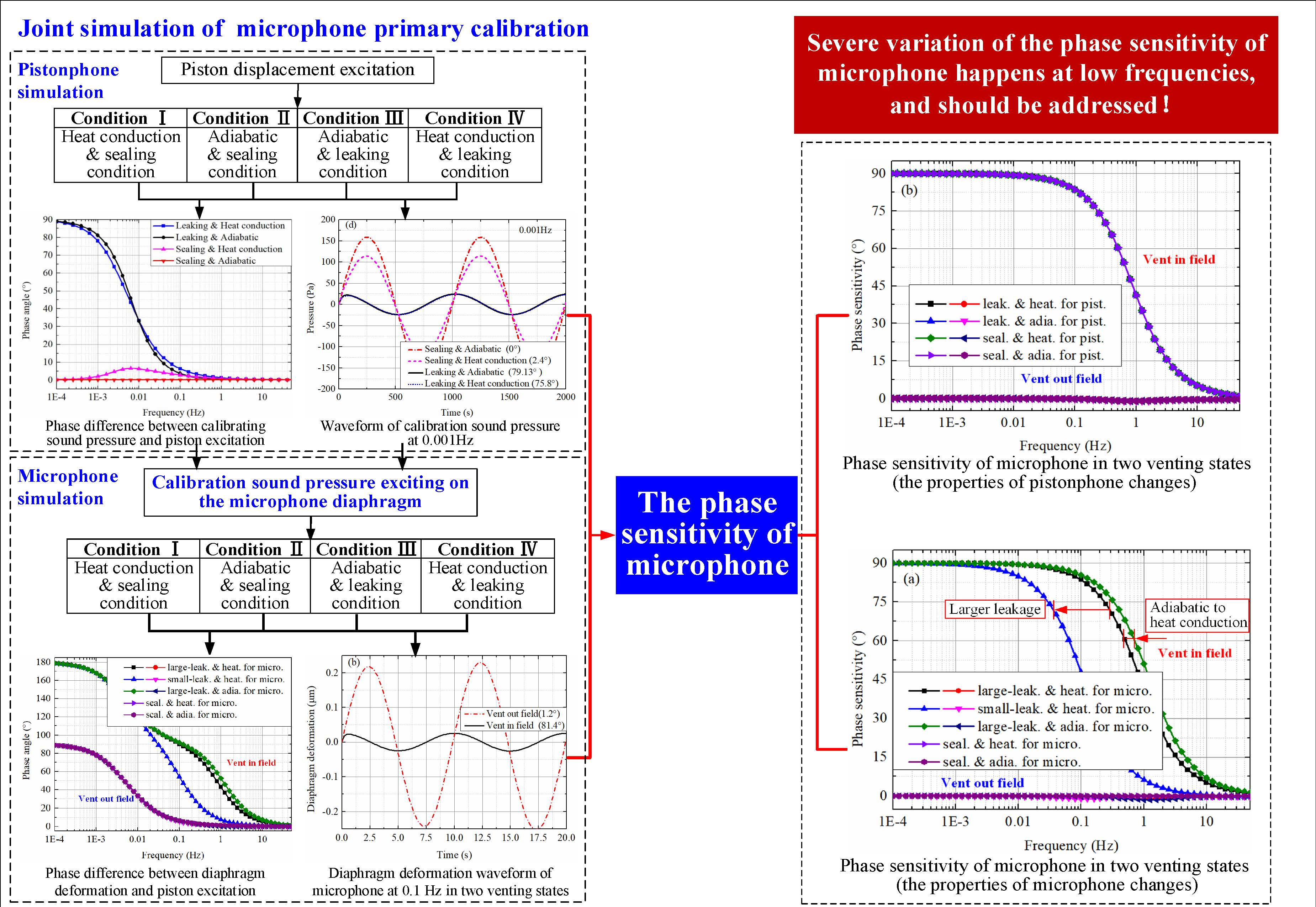
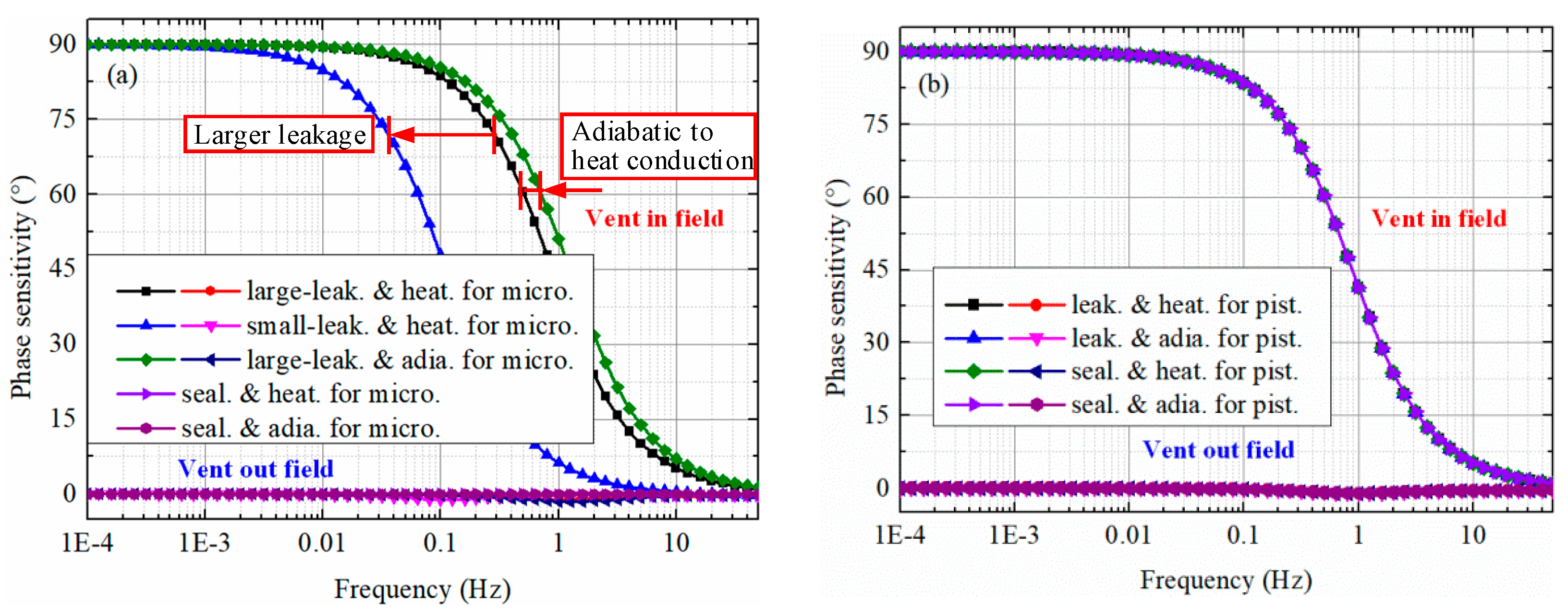
4.3. Frequency Domain Simulation
4.4. Verification and Planning
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Seo, S.-W.; Yun, S.; Kim, M.-G.; Sung, M.; Kim, Y. Screen-Based Sports Simulation Using Acoustic Source Localization. Appl. Sci. 2019, 9, 2970. [Google Scholar] [CrossRef]
- Cheng, R.; Bao, C.; Cui, Z. MASS: Microphone Array Speech Simulator in Room Acoustic Environment for Multi-Channel Speech Coding and Enhancement. Appl. Sci. 2020, 10, 1484. [Google Scholar] [CrossRef]
- Ferguson, B.; Gendron, P.; Michalopoulou, Z.H.; Wong, K.T. Introduction to the special issue on acoustic source localization. J. Acoust. Soc. Am. 2019, 146, 4647–4649. [Google Scholar] [CrossRef] [PubMed]
- Krishnappa, G. Cross-spectral method of measuring acoustic intensity by correcting phase and gain mismatch errors by microphone calibration. J. Acoust. Soc. Am. 1981, 69, 307–310. [Google Scholar] [CrossRef]
- Chen, X.; Chen, Y.H.; Cao, S.; Zhang, L.; Zhang, X.; Chen, X. Acoustic indoor localization system integrating TDMA+FDMA transmission scheme and positioning correction technique. Sensors 2019, 19, 2353. [Google Scholar] [CrossRef]
- Groot-Hedlin, C.D.D.; Hedlin, M.A.H.; Drob, D.P. Infrasound Monitoring for Atmospheric Studies; Springer: Dordrecht, The Netherlands, 2010. [Google Scholar]
- Sciotto, M.; Cannata, A.; Gresta, S.; Privitera, E.; Spina, L. Seismic and infrasound signals at Mt. Etna: Modeling the north-east crater conduit and its relation with the 2008–2009 eruption feeding system. J. Volcanol. Geoth. Res. 2013, 254, 53–68. [Google Scholar] [CrossRef]
- Gitterman, Y.; Hofstetter, R. GT0 explosion sources for IMS infrasound calibration: Charge design and yield estimation from near-source observations. Pure Appl. Geophys. 2014, 171, 599–619. [Google Scholar] [CrossRef]
- Adin Mann, J., III; Pascal, J.C.; Phan, T.M. Low frequency correction of electrostatic microphone pair phase calibration. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, InterNoise90, Gothenburg, Sweden, 13 August 1990; pp. 1057–1060. [Google Scholar]
- Lowis, C.R.; Joseph, P.F.; Sijtsma, P. A technique for the in situ phase calibration of in-duct axial microphone arrays. J. Sound Vib. 2010, 329, 4634–4642. [Google Scholar] [CrossRef]
- Lauterbach, A.; Ehrenfried, K.; Koop, L.; Loose, S. Procedure for the accurate phase calibration of a microphone array. In Proceedings of the Aiaa/ceas Aeroacoustics Conference & Aiaa Aeroacoustics Conference, Miami, FL, USA, 11–13 May 2009. [Google Scholar]
- Rasmussen, G.; Nielson, K.M. Technical note low frequency calibration of measurement microphones. J. Low Freq. Noise Vib. Act. Control 2009, 28, 223–228. [Google Scholar] [CrossRef]
- Kutin, J.; Bajsić, I. Characteristics of a dynamic pressure generator based on loudspeakers. Sens. Actuators A-Phys. 2011, 168, 149–154. [Google Scholar] [CrossRef]
- Štefe, M.; Svete, A.; Kutin, J. Development of a dynamic pressure generator based on a loudspeaker with improved frequency characteristics. Measurement 2018, 122, 212–219. [Google Scholar] [CrossRef]
- Larsonner, F.; Uszakiewicz, H.G.; Mende, M. Infrasound sensors and their calibration at low frequency. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, InterNoise14, Melbourne, Australia, 1 January 2014; pp. 1127–1136. [Google Scholar]
- Infrasound sensor. Available online: http://blog.sina.com.cn/s/blog_67cd56c10100iuaj.html (accessed on 14 May 2010).
- Tóth, P.; Schram, C. Simultaneous calibration of multiple microphones for both phase and amplitude in an impedance tube. Arch. Acoust. 2014, 39, 227–287. [Google Scholar] [CrossRef]
- Scott, D.A.; Dickinson, L.P.; Ballico, M.J. Traceable calibration of microphones at low frequencies. Meas. Sci. Technol. 2019, 30, 035011. [Google Scholar] [CrossRef]
- International Electrical Commission. 2009 Electroacoustics—Measurement Microphones—Primary Method for Pressure Calibration of Laboratory Standard Microphones by the Reciprocity Technique IEC 61094-2:2009. 2009. Available online: https://webstore.iec.ch/publication/4486 (accessed on 15 May 2020).
- Nel, R.; Van Zyl, B.G.; Snyman, L.W. Analysing the effects of phase sensitivity in low frequency primary microphone calibrations. Appl. Acoust. 2017, 127, 95–104. [Google Scholar] [CrossRef]
- Jackett, R.J.; Barham, R.G. Phase sensitivity uncertainty in microphone pressure reciprocity calibration. Metrologia 2013, 50, 170–179. [Google Scholar] [CrossRef]
- Barham, R.G.; Goldsmith, M.J. The application of the NPL laser pistonphone to the international comparison of measurement microphones. Metrologia 2007, 44, 210–216. [Google Scholar] [CrossRef]
- Sadıkoğlu, E.; Bilgiç, E.; Karaböce, B. A laser pistonphone based on self-mixing interferometry for the absolute calibration of measurement microphones. Appl. Acoust. 2004, 65, 833–840. [Google Scholar] [CrossRef]
- Rennie, A.J. A laser-pistonphone for absolute calibration of laboratory standard microphones in the frequency range 0.1 Hz to 100 Hz. NPL Acoust. Rep. Ac. 1977, 78, 23410. [Google Scholar]
- He, W.; He, L.B.; Zhang, F.; Rong, Z.; Jia, S. A dedicated pistonphone for absolute calibration of infrasound sensors at very low frequencies. Meas. Sci. Technol. 2016, 27, 025018. [Google Scholar] [CrossRef]
- Wong, G.S.K.; Embleton, T.F.W. AIP handbook of condenser microphones: Theory, calibration, and measurements. J. Acoust. Soc. Am. 1995, 98, 171–172. [Google Scholar]
- Zhang, F.; He, W.; He, L.B.; Rong, Z. Acoustic properties of pistonphones at low frequencies in the presence of pressure leakage and heat conduction. J. Sound Vib. 2015, 358, 324–333. [Google Scholar] [CrossRef]
- Liu, D.; Liu, A.B.; Zhang, F.; Gang, X.; Li, L.; Wu, H. A dynamic pressure calibration device based on the low speed servomotor and pistonphone technique. Measurement 2020, 151, 107254. [Google Scholar] [CrossRef]
- The “Thermoviscous Acoustics Branch” section in the Acoustics Module User’s Guide of the COMSOL Documentation. Available online: https://doc.comsol.com/5.4/doc/com.comsol.help.aco/AcousticsModuleUsersGuide.pdf (accessed on 15 May 2020).
- Brüel and Kjær. Microphone Handbook—Vol. 1: Theory. Technical Documentation. 1996. Available online: https://www.bksv.com/media/doc/be1447.pdf (accessed on 15 May 2020).
- Homentcovschi, D.; Miles, R.N. An analytical-numerical method for determining the mechanical response of a condenser microphone. J. Acoust. Soc. Am. 2011, 130, 3698–3705. [Google Scholar] [CrossRef] [PubMed]
- Lavergne, T.; Durand, S.; Bruneau, M.; Joly, N. Dynamic behavior of the circular membrane of an electrostatic microphone: Effect of holes in the backing electrode. J. Acoust. Soc. Am. 2010, 128, 3459–3477. [Google Scholar] [CrossRef] [PubMed]
- The Brüel & Kjær 4134 Condenser Microphone. Available online: https://www.comsol.it/model/the-br-252-el-kj-230-r-4134-condenser-microphone-12375 (accessed on 29 May 2020).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Symbol | Value |
|---|---|---|
| Chamber radius | R1 | 65 mm |
| Chamber length | L1 | 393 mm |
| Chamber volume | V0 | 5.3 × 106 mm3 |
| Diaphragm radius | R2 | 35 mm |
| Sealing seat length | L2 | 24.2 mm |
| Piston radius | R3 | 20 mm |
| Piston internal length | L3 | 6 mm |
| Piston displacement | ξpa | 5 mm |
| Equalizing hole radius | R4 | 0.205 mm |
| Equalizing hole length | L4 | 20 mm |
| Item | Symbol | Value |
|---|---|---|
| Diaphragm radius | rm | 4.5 mm |
| Diaphragm tension | Tm0 | 3160 N/m |
| Diaphragm thickness | tm | 5 μm |
| Diaphragm density | ρm | 8900 kg/m3 |
| Gap | h | 19 μm |
| Young’s modulus of diaphragm | Em | 2.21 × 1011 Pa |
| Poisson’s ratio of diaphragm | νm | 0.4 |
| Back-plate radius | rBp | 3.7 mm |
| Holes radius | rH | 0.28 mm |
| Location of inner holes | r1 | 1.6 mm |
| Location of outer holes | r2 | 2.8 mm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Liu, D.; Liu, A.; Gang, X.; Li, L. Numerical Study on the Phase Sensitivity Variation in Low Frequency Primary Microphone Calibrations. Appl. Sci. 2020, 10, 3799. https://doi.org/10.3390/app10113799
Zhang F, Liu D, Liu A, Gang X, Li L. Numerical Study on the Phase Sensitivity Variation in Low Frequency Primary Microphone Calibrations. Applied Sciences. 2020; 10(11):3799. https://doi.org/10.3390/app10113799
Chicago/Turabian StyleZhang, Fan, Di Liu, Aibing Liu, Xianyue Gang, and Lijun Li. 2020. "Numerical Study on the Phase Sensitivity Variation in Low Frequency Primary Microphone Calibrations" Applied Sciences 10, no. 11: 3799. https://doi.org/10.3390/app10113799
APA StyleZhang, F., Liu, D., Liu, A., Gang, X., & Li, L. (2020). Numerical Study on the Phase Sensitivity Variation in Low Frequency Primary Microphone Calibrations. Applied Sciences, 10(11), 3799. https://doi.org/10.3390/app10113799