
Damping Performance Analysis of Magnetorheological Damper Based on Multiphysics Coupling




Abstract
:1. Introduction
2. Structure and Principle of Proposed MR Damper
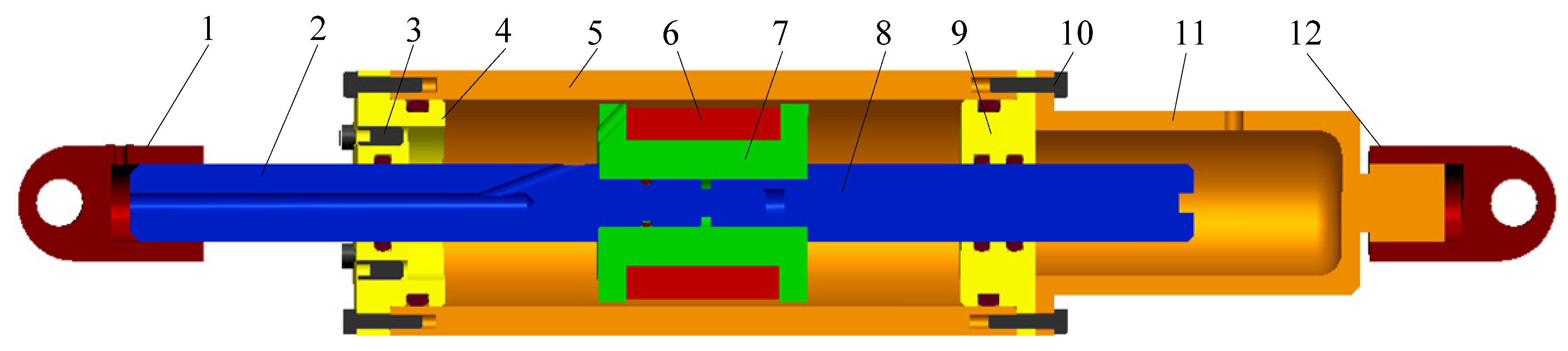
2.1. Structural Design
2.2. Working Principle
3. Mathematical Models of Proposed MR Damper
3.1. Mechanical Model
3.2. Electromagnetic Field Model
3.3. Flow Field Model
3.4. Structural Stress Field Model
4. Multiphysics Coupling Simulation of the Proposed MR Damper
4.1. Simulation Model
4.2. Simulation Analysis of Electromagnetic Field
4.3. Simulation Analysis of Flow Field
4.4. Simulation Analysis of Structural Stress Field
5. Experimental Analysis of Proposed MR Damper
5.1. Damping Performance Test System
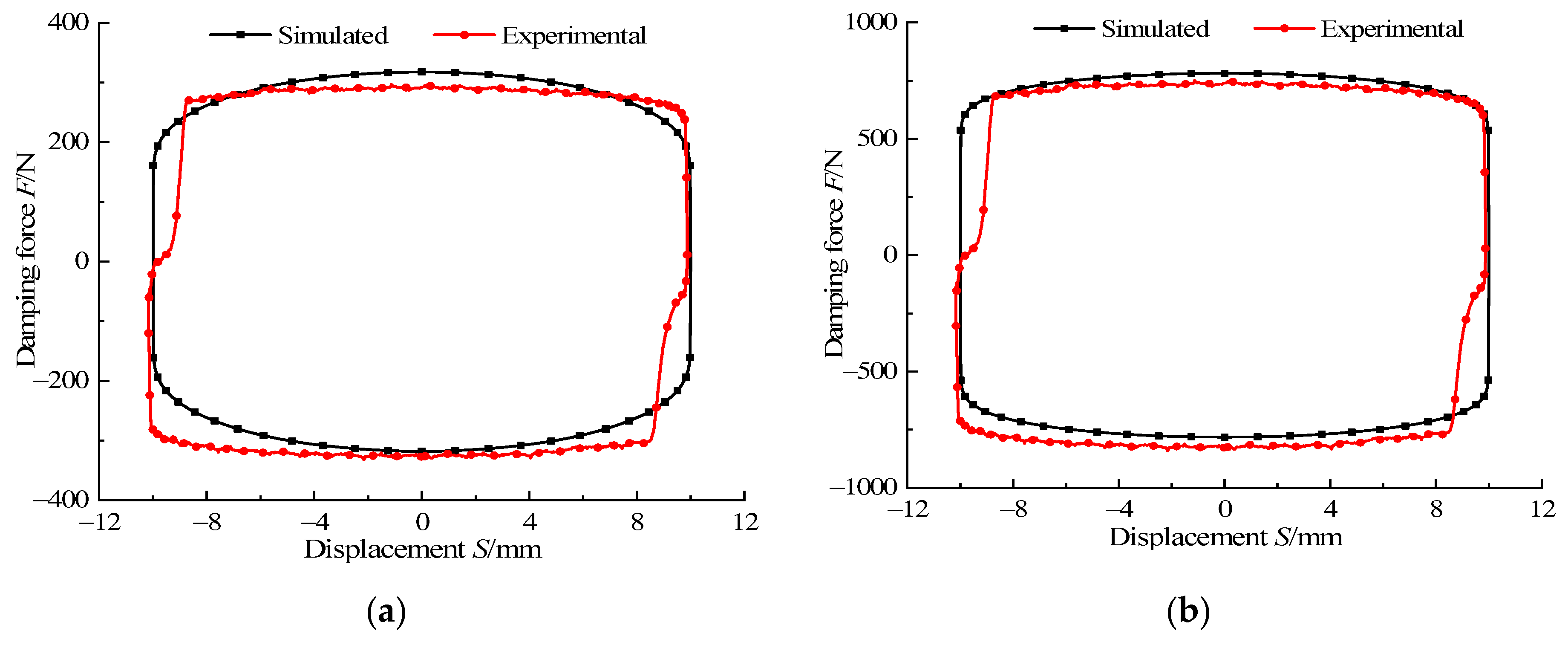
5.2. Damping Performance Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shiao, Y.; Kuo, W.H.; Nguyen, Q.A.; Lai, C.W. Development of a variable-damping magnetorheological damper with multiple poles. J. Vibroeng. 2015, 17, 1071–1078. [Google Scholar]
- Bai, X.-X.; Hu, W.; Wereley, N.M. Magnetorheological Damper Utilizing an Inner Bypass for Ground Vehicle Suspensions. IEEE Trans. Magn. 2013, 49, 3422–3425. [Google Scholar] [CrossRef]
- Floreán-Aquino, K.H.; Arias-Montiel, M.; Linares-Flores, J.; Mendoza-Larios, J.G.; Cabrera-Amado, Á. Modern Semi-Active Control Schemes for a Suspension with MR Actuator for Vibration Attenuation. Actuators 2021, 10, 22. [Google Scholar] [CrossRef]
- Cho, C.H.; Choi, S.B. Designing Requirement of Spring and MR Damper for New Type Baby Car Seat. Appl. Mech. Mater. 2015, 741, 28–31. [Google Scholar] [CrossRef]
- Hu, G.; Liu, Q.; Ding, R.; Li, G. Vibration control of semi-active suspension system with magnetorheological damper based on hyperbolic tangent model. Adv. Mech. Eng. 2017, 9, 1–15. [Google Scholar] [CrossRef]
- Yang, J.; Ning, D.; Sun, S.; Zheng, J.; Lu, H.; Nakano, M.; Zhang, S.; Du, H.; Li, W. A semi-active suspension using a magnetorheological damper with nonlinear negative-stiffness component. Mech. Syst. Signal Process. 2021, 147, 107071. [Google Scholar] [CrossRef]
- Dong, X. Design and characterization of axial flux permanent magnet energy harvester for vehicle magnetorheological damper. Smart Mater. Struct. 2015, 25, 015024. [Google Scholar] [CrossRef]
- Sun, S.; Tang, X.; Yang, J.; Ning, D.; Du, H.; Zhang, S.; Li, W. A New Generation of Magnetorheological Vehicle Suspension System with Tunable Stiffness and Damping Characteristics. IEEE Trans. Ind. Inform. 2019, 15, 4696–4708. [Google Scholar] [CrossRef]
- Tang, X.; Du, H.; Sun, S.; Ning, D.; Xing, Z.; Li, W. Takagi–Sugeno Fuzzy Control for Semi-Active Vehicle Suspension with a Magnetorheological Damper and Experimental Validation. IEEE/ASME Trans. Mechatron. 2016, 22, 291–300. [Google Scholar] [CrossRef]
- Sassi, S.; Sassi, A.; Cherif, K.; Tarlochan, F. Magnetorheological damper with external excitation for more efficient control of vehicles’ dynamics. J. Intell. Mater. Syst. Struct. 2018, 29, 2919–2932. [Google Scholar] [CrossRef]
- Satria, R.R.; Ubaidillah, U.; Imaduddin, F. Analytical Approach of a Pure Flow Mode Serpentine Path Rotary Magnetorheological Damper. Actuators 2020, 9, 56. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Z.; Guo, K.; Zheng, F.; Wang, Z. A novel pumping magnetorheological damper: Design, optimization, and evaluation. J. Intell. Mater. Syst. Struct. 2017, 28, 2339–2348. [Google Scholar] [CrossRef]
- Kim, K.; Chen, Z.; Yu, D.; Rim, C. Design and experiments of a novel magneto-rheological damper featuring bifold flow mode. Smart Mater. Struct. 2016, 25, 075004. [Google Scholar] [CrossRef]
- Li, G.; Yang, Z.-B. Modelling and Analysis of a Magnetorheological Damper with Nonmagnetized Passages in Piston and Minor Losses. Shock. Vib. 2020, 2020, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Ruan, X.; Xuan, S.; Zhao, J.; Bian, H.; Gong, X. Mechanical performance of a novel magnetorheological fluid damper based on squeeze-valve bi-mode of MRF. Smart Mater. Struct. 2020, 29, 055018. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, Z.-D.; Guo, Y.-Q.; Xu, Y.-W.; Zhang, J. Internal magnetic field tests and magnetic field coupling model of a three-coil magnetorheological damper. J. Intell. Mater. Syst. Struct. 2020, 31, 2179–2195. [Google Scholar] [CrossRef]
- Mangal, S.K.; Kumar, A. Experimental and Numerical Studies of Magnetorheological (MR) Damper. Chin. J. Eng. 2014, 2014, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Olivier, M.; Sohn, J.W. Design and geometric parameter optimization of hybrid magnetorheological fluid damper. J. Mech. Sci. Technol. 2020, 34, 2953–2960. [Google Scholar] [CrossRef]
- Ganesha, A.; Patil, S.; Kumar, N.; Murthy, A. Magnetic field enhancement technique in the fluid flow gap of a single coil twin tube Magnetorheological damper using magnetic shields. J. Mech. Eng. Sci. 2020, 14, 6679–6689. [Google Scholar] [CrossRef]
- Golinelli, N.; Spaggiari, A. Experimental validation of a novel magnetorheological damper with an internal pressure control. J. Intell. Mater. Syst. Struct. 2017, 28, 2489–2499. [Google Scholar] [CrossRef] [Green Version]
- Hu, G.; Liu, H.; Duan, J.; Yu, L. Damping performance analysis of magnetorheological damper with serial-type flow channels. Adv. Mech. Eng. 2019, 11, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Meng, W.; Wang, Y. Numerical and experimental studies on a novel magneto-rheological fluid brake based on fluid–solid coupling. Sci. Prog. 2020, 103, 1–33. [Google Scholar] [CrossRef] [Green Version]
- Gurubasavaraju, T.M.; Kumar, H.; Mahalingam, A. An approach for characterizing twin-tube shear-mode magnetorheological damper through coupled FE and CFD analysis. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 139. [Google Scholar] [CrossRef]
- Gołdasz, J.; Sapiński, B. Application of CFD To Modeling of Squeeze Mode Magnetorheological Dampers. Acta Mech. Autom. 2015, 9, 129–134. [Google Scholar] [CrossRef] [Green Version]
- Mata, G.T.; Kumar, H.; Mahalingam, A. Performance analysis of a semi-active suspension system using coupled CFD-FEA based non-parametric modeling of low capacity shear mode monotube MR damper. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 1214–1231. [Google Scholar] [CrossRef]
- Zhang, P.; Lee, K.-H.; Lee, C.-H. Friction behavior of magnetorheological fluids with different material types and magnetic field strength. Chin. J. Mech. Eng. 2015, 29, 84–90. [Google Scholar] [CrossRef]
- Zhang, J.; Song, W.; Peng, Z.; Gao, J.; Wang, N.; Choi, S.-B.; Kim, G.-W. Microstructure Simulation and Constitutive Modelling of Magnetorheological Fluids Based on the Hexagonal Close-packed Structure. Materials 2020, 13, 1674. [Google Scholar] [CrossRef] [Green Version]
- Cheng, M.; Chen, Z.B.; Xing, J.W. Design, Analysis, and Experimental Evaluation of a Magnetorheological Damper with Meandering Magnetic Circuit. IEEE Trans. Magn. 2018, 54, 1–10. [Google Scholar] [CrossRef]
- Hu, G.; Ru, Y.; Li, W. Design and development of a novel displacement differential self-induced magnetorheological damper. J. Intell. Mater. Syst. Struct. 2015, 26, 527–540. [Google Scholar] [CrossRef] [Green Version]
- Hu, G.; Li, L.; Liu, H.; Liu, F. Effects of Winding Cylinder Materials on Dynamic Performances of a New MR Damper. IEEE Access 2020, 8, 87829–87841. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameter | Values | Design Parameter | Values |
|---|---|---|---|
| Inner hole radius of piston r1/mm | 5 | Thickness of damping gap h/mm | 1 |
| Radius of piston rod r2/mm | 8 | Length of piston head L/mm | 45 |
| Radius of piston head r3/mm | 20.5 | Length of magnetic yoke on piston flanks l/mm | 6 |
| External radius of cylinder r4/mm | 27.5 | Width of bobbin w/mm | 33 |
| Length of cylinder Ld/mm | 135 | Depth of bobbin t/mm | 7.5 |
| Wall thickness of cylinder hd/mm | 6 | Turns of coil N | 485 |
| Property | Values | Property | Values |
|---|---|---|---|
| Density ρ/g·cm–3 | 5 | Magnetic properties M/kA·m−1 | 1 |
| Viscosity η/Pa·s | 8 | Working temperature T/°C | 45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, G.; Wu, L.; Deng, Y.; Yu, L.; Luo, B. Damping Performance Analysis of Magnetorheological Damper Based on Multiphysics Coupling. Actuators 2021, 10, 176. https://doi.org/10.3390/act10080176
Hu G, Wu L, Deng Y, Yu L, Luo B. Damping Performance Analysis of Magnetorheological Damper Based on Multiphysics Coupling. Actuators. 2021; 10(8):176. https://doi.org/10.3390/act10080176
Chicago/Turabian StyleHu, Guoliang, Lifan Wu, Yingjun Deng, Lifan Yu, and Bin Luo. 2021. "Damping Performance Analysis of Magnetorheological Damper Based on Multiphysics Coupling" Actuators 10, no. 8: 176. https://doi.org/10.3390/act10080176
APA StyleHu, G., Wu, L., Deng, Y., Yu, L., & Luo, B. (2021). Damping Performance Analysis of Magnetorheological Damper Based on Multiphysics Coupling. Actuators, 10(8), 176. https://doi.org/10.3390/act10080176