3.1. Selection of Construction Scheme
As a typical flexible structure [
37], the stiffness of the spoke-type single-layer cable net structure is generated by tensioning the cables. Generally, the temporary supports are built to lift the rigid tension ring. However, the inner tension ring of this structure is composed of light ring cables, so it is uneconomical and inefficient to build temporary supports. Single-layer cable-net structures with flexible tension rings are often hoisted entirely by traction cables.
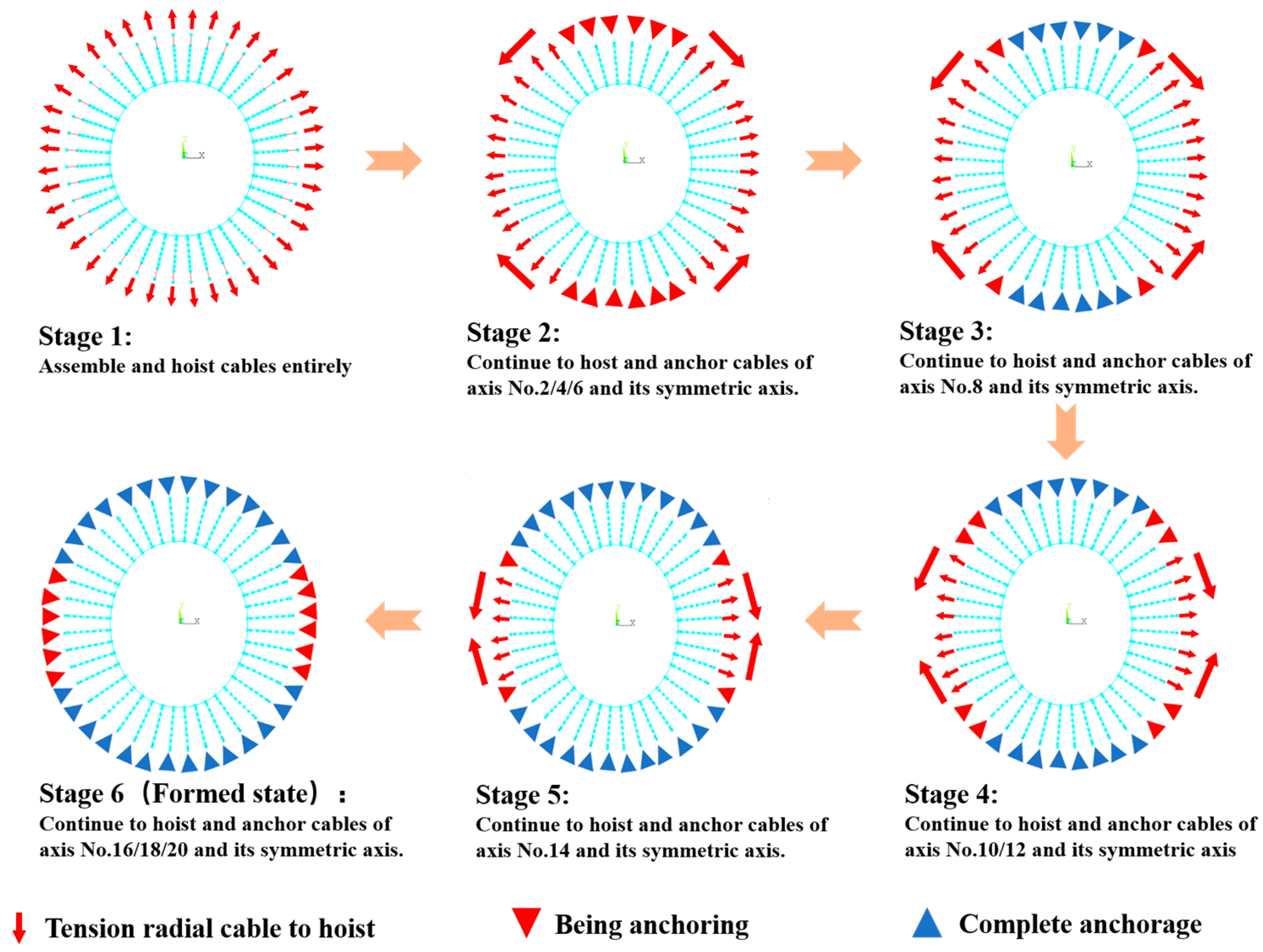
After considering the characteristics of the target engineering comprehensively, it was decided to adopt the construction scheme of “assembling on the ground with free stress, hoisting entirely using traction cables, and tensioning/anchoring in batches”. The radial cables were divided into three groups: A, B, and C (shown as
Figure 5). Firstly, the radial and ring cables were assembled on the ground, and the traction devices were used in the outer compression truss to hoist three areas simultaneously. Then, area A was hoisted to the precalculated position, and the radial cables of area A were anchored to the pin-connected plate. Tension was continued on the cables of area B and C, then they were anchored chronologically. The construction scheme of the cables is shown in
Figure 6.
After confirming the construction scheme of the cable net structure, the entire structure adopted the following construction scheme:
(1) Assembling of the outer diagonal column and compression truss;
(2) Assembling of the radial cables, ring cables, and cable clamps on the stands or stadium;
(3) Taking the outer compression truss as the fulcrum and using the traction cables to tension the radial cables to hoist the cable net structure;
(4) Anchoring the radial cables to the outer compression truss in batches (areas A–C) until the cable structure was formed.
3.2. Finite Element Modeling
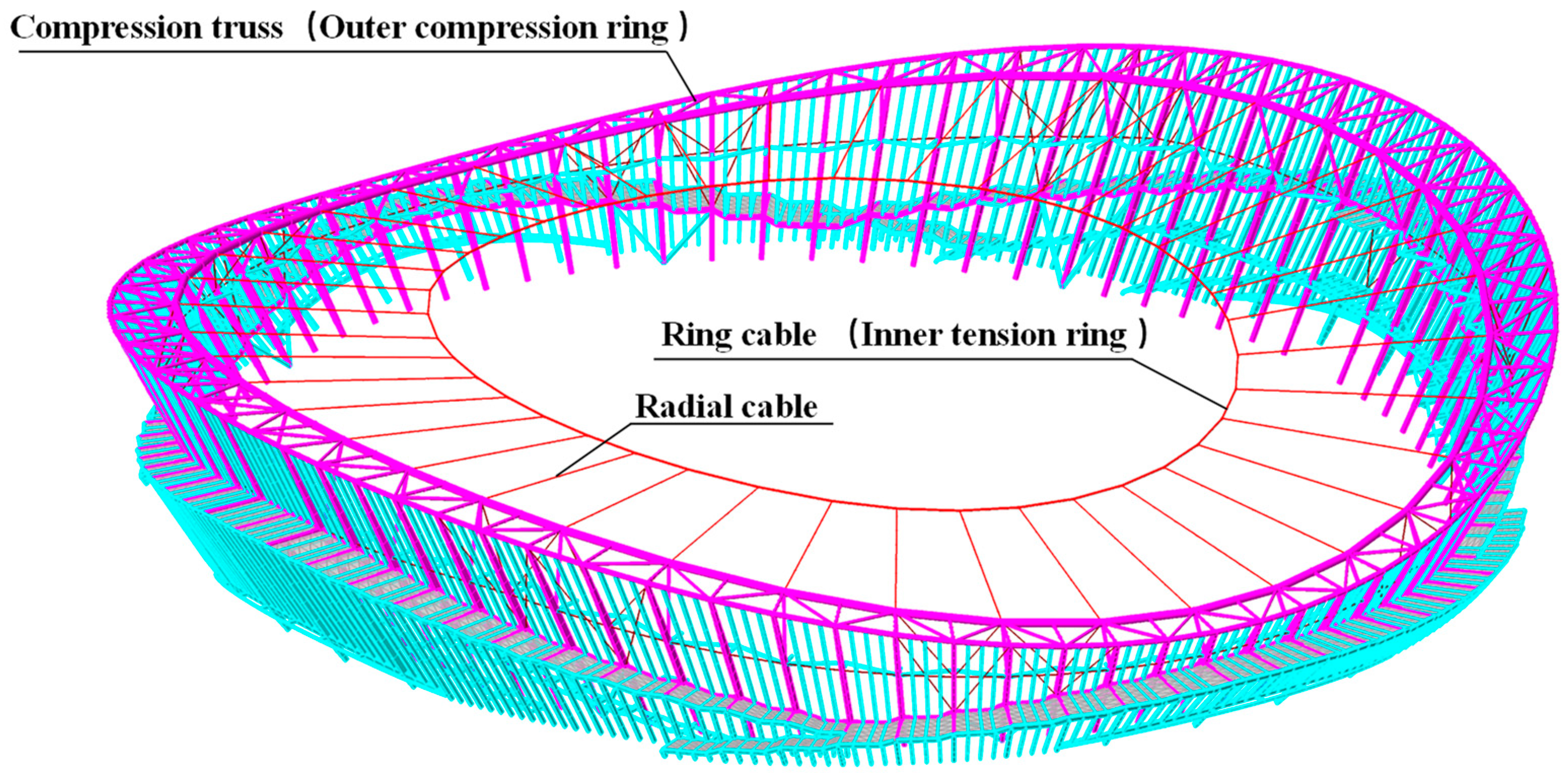
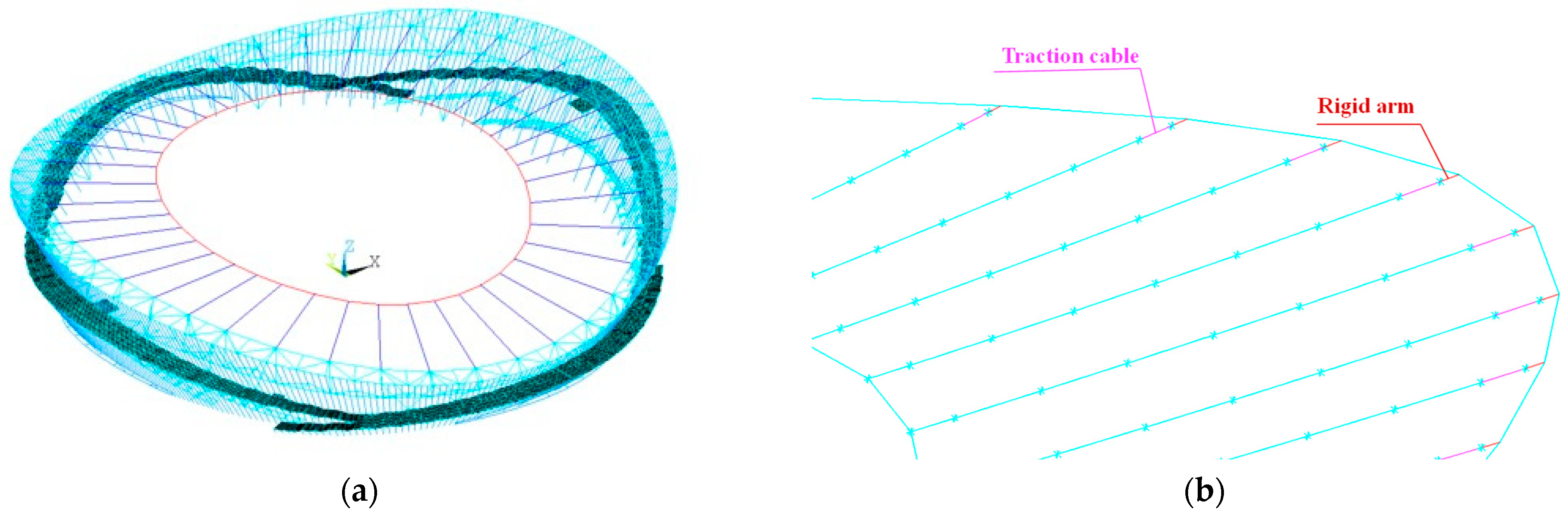
The finite element model of the structure was established in ANSYS 2019R1 according to the information from the structure designer, and the finite element analysis of the construction process was carried out. The finite element model in ANSYS included the outer steel compression truss, radial cables, ring cables, and clamps, as shown in
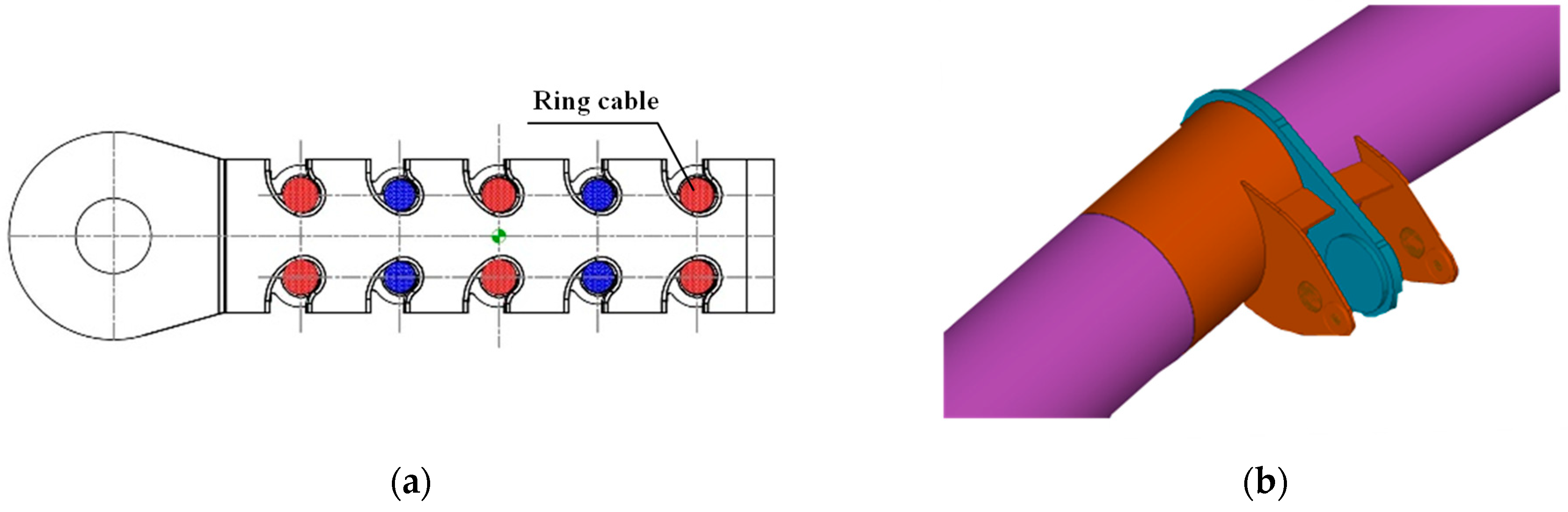
Figure 7a. In ANSYS, traction cables were modeled, and rigid arms were established to simulate the pin-connected plate that connected the radial cables to the outer compression truss, as shown in
Figure 7b.
According to the connection form and force characteristics of different components, the appropriate element type and set element conditions were selected, as shown in
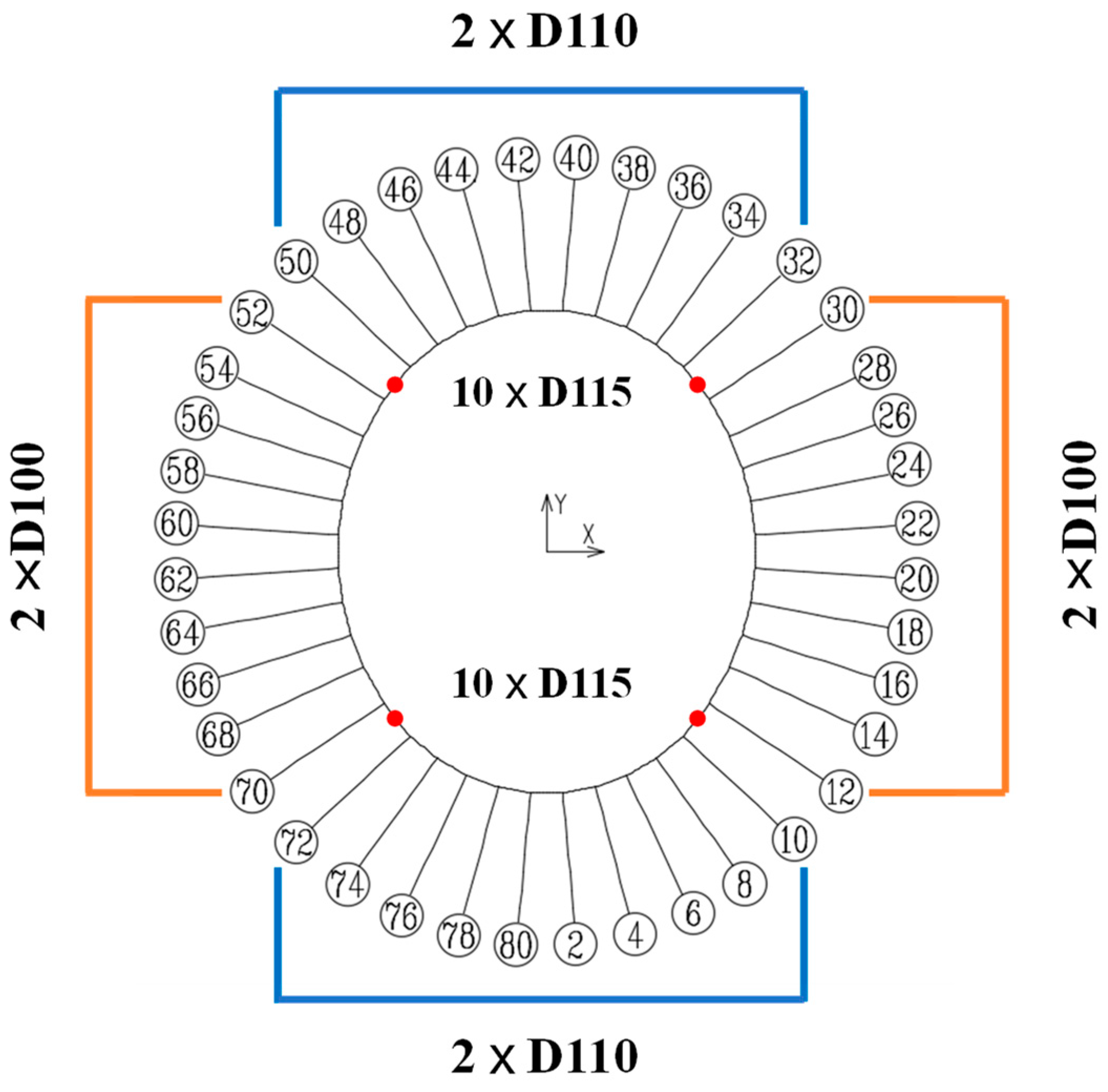
Table 2. For this single-layer cable structure, most of the steel structure (BEAM or LINK element) was divided into one unit, and the longer element was divided into 3~5 elements. In order to accurately simulate the cable structure (LINK180 element), each ring cable was divided into ten elements, and each radial cable was divided into eight elements.
The loading conditions were 1.0 times the structural self-weight and 1.0 times the cable prestress. The acceleration of gravity was 9.806 m/s
2, and the self-weight was automatically calculated by ANSYS. Each clamp of the inner ring cable weighed 5.2 tons and each clamp of the radial cable weighed 0.2 tons, both of which were modeled by the MASS21 element. The surface load of the PTFE membrane surface was 0.15 kN/m
2. The prestress (P) was applied to the cable by means of the equivalent temperature difference
given by Formula (1).
where
E is the elastic modulus,
A is the section area, and
is the coefficient of linear expansion.
3.3. Nonlinear Dynamic Finite Element Method (NDFEM)
Before the nonlinear dynamic analysis, the structural self-vibration mode of the engineering project was studied. Assuming that the undamped free vibration of the multi-degree-of-freedom structure system was simple harmonic motion, the following formula can be obtained:
where
,
,
, and
are the stiffness matrix, mass matrix, displacement component, and natural circle frequency of the structure, respectively. By solving Equation (2), the natural frequencies of each order of the structure can be obtained. In ANSYS, considering the stress hardening effect, the mode of modal analysis adopted a 1.0 dead weight and prestress. The natural frequency of each order is shown in
Table 3. The first four modes were mainly vertical vibration of the cable network, and the local torsion in the cable network plane began from the 5th mode.
The above results show that the basic frequency of the structure was 0.430 Hz, the basic period was 2.236 s, and the vibration frequency distribution was relatively dense. The early mode was vertical vibration, and the local in-plane torsion appeared in the later stage.
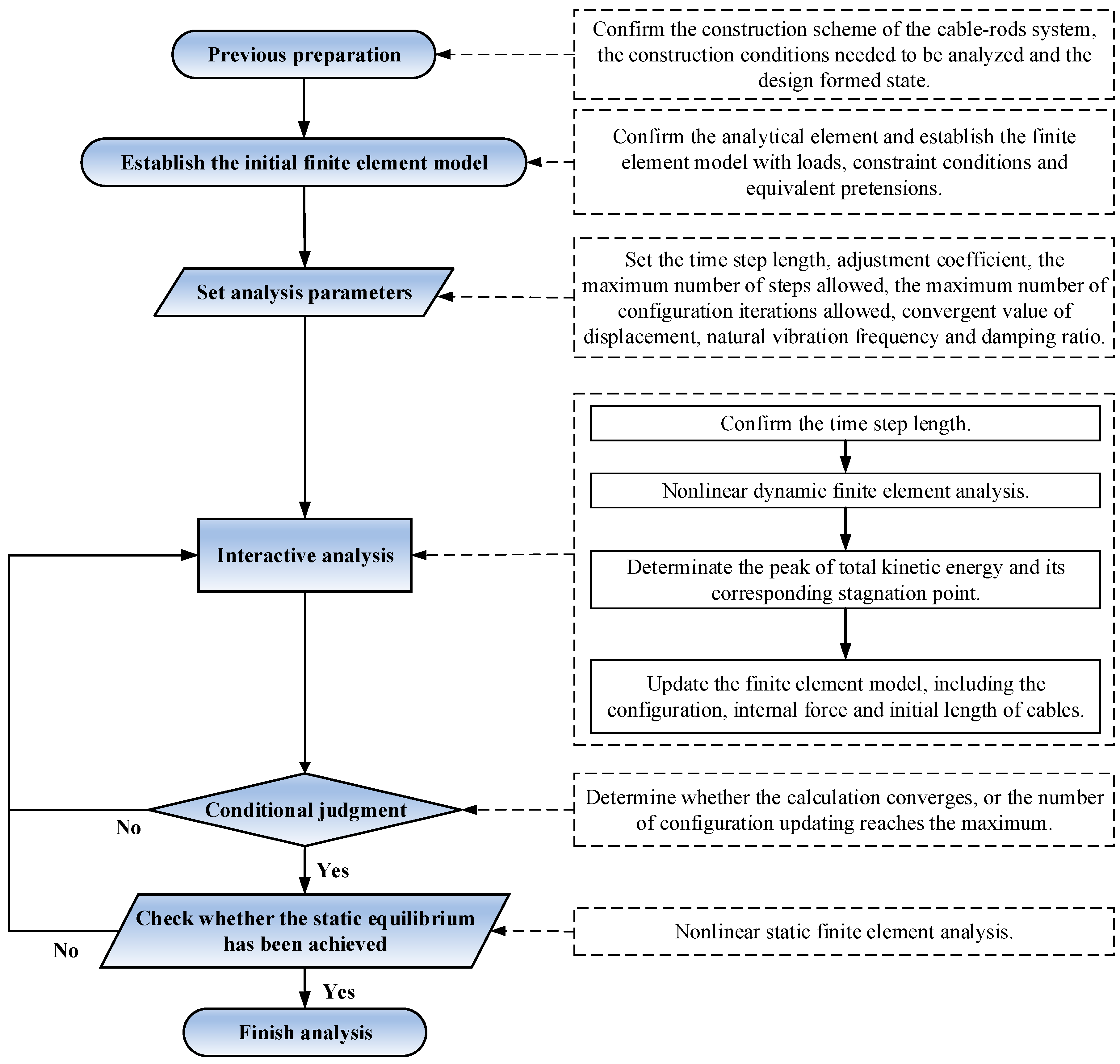
The construction process analysis of the single-layer structure net was based on the nonlinear dynamic finite element method (NDFEM) proposed by Luo [
24]. Based on the theory of nonlinear dynamics, this method added the virtual inertial force and viscous damping force to establish the nonlinear motion equation of the whole structure, transforming the static problem into a dynamic problem. The NDFEM makes the dynamic equilibrium state gradually converge to the static equilibrium by iteratively updating the configuration of the finite element model. The cable net structure was in a static unbalanced state before the analysis and in the static balanced state during the analysis. Whether the structure is in static equilibrium or not will be determined according to the peak kinetic energy and time stagnation point obtained in the virtual dynamic process. When the finite element model converged, the nonlinear static analysis was carried out to check the static equilibrium state. The detailed flowchart of the NDFEM is shown in
Figure 8.
Setting the time step length, the determination of the peak of total kinetic energy, and its corresponding stagnation point are the significant technical measures of the NDFEM.
1. Setting and adjusting the time step length
Time step length,
, is one of the key factors that determine the convergence speed and efficiency of NDFEM. A lower
can make the iteration of the dynamic equilibrium easier to converge as well as lead to the increase in the total time steps
required to achieve static equilibrium and the decrease in calculation efficiency. An acceptable time step should ensure that the total kinetic energy reaches its peak in less time steps under the premise of the convergence of dynamic analysis. The NDFEM can be divided into three stages, as shown in
Table 4.
Considering that the time step has an important influence on the dynamic balance iteration and analysis efficiency, the time step adjustment coefficient was used to automatically adjust the time step of each dynamic analysis in the analysis process, and the adjustment strategy is as follows:
(1) The initial time step length is used in the first iteration.
(2) If the time step arises and the total kinetic energy does not decrease when conducting the (m − 1)th times dynamic analysis, the time step length of the (m)th times dynamic analysis will be adjusted to automatically.
(3) If the (m − 1)th times dynamic analysis does not converge, then .
2. The peak of total kinetic energy () and its corresponding stagnation point
The calculation of the k
th time step total kinetic energy in the dynamic analysis is as follows:
The deterministic strategy of the peak of total kinetic energy () and its corresponding stagnation point are as follows:
(1) Adjust ;
(2) When the kth time step converges iteratively, if , , the total kinetic energy does not reach its peak, so continue the dynamic analysis and enter the (k + 1)th time step. If , , make the total kinetic energy of the three continuous time steps fit with a quadratic parabola curve and calculate the peak value of the total kinetic energy and its corresponding time stagnation point. If , , then , .
(3) When the kth time step does not converge iteratively, if k = 1, adjust the time step and enter the next dynamic analysis. If 1 < k , ,.
The NDFEM method can greatly improve the operation efficiency by using appropriate time steps, and the analytical results are stable and accurate. Up to now, the NDFEM method has been applied in the construction simulation analysis of some cable structures and guided their construction successfully. Single-layer cable and double-layer cable structures have been included in Suzhou Industrial Park Stadium [
27], Suzhou Swimming Stadium, Sanya Stadium, Leshan Olympic Sport Center Stadium, Linyi Sport Center Stadium, and Desheng Sport Center Stadium.
3.4. Analysis, Results, and Discussion: Finite Element Simulation of Construction Process
The cable net will be anchored from area A to area C during construction. The value of cable forces is small in the early stage, so the length change of the traction cables can be fast. Subsequently, the cable forces become bigger, so the length change of the traction cables should be slower to control the cable force and configuration accurately. According to the above, the construction process analysis was divided into 11 construction conditions, as shown in
Table 5.
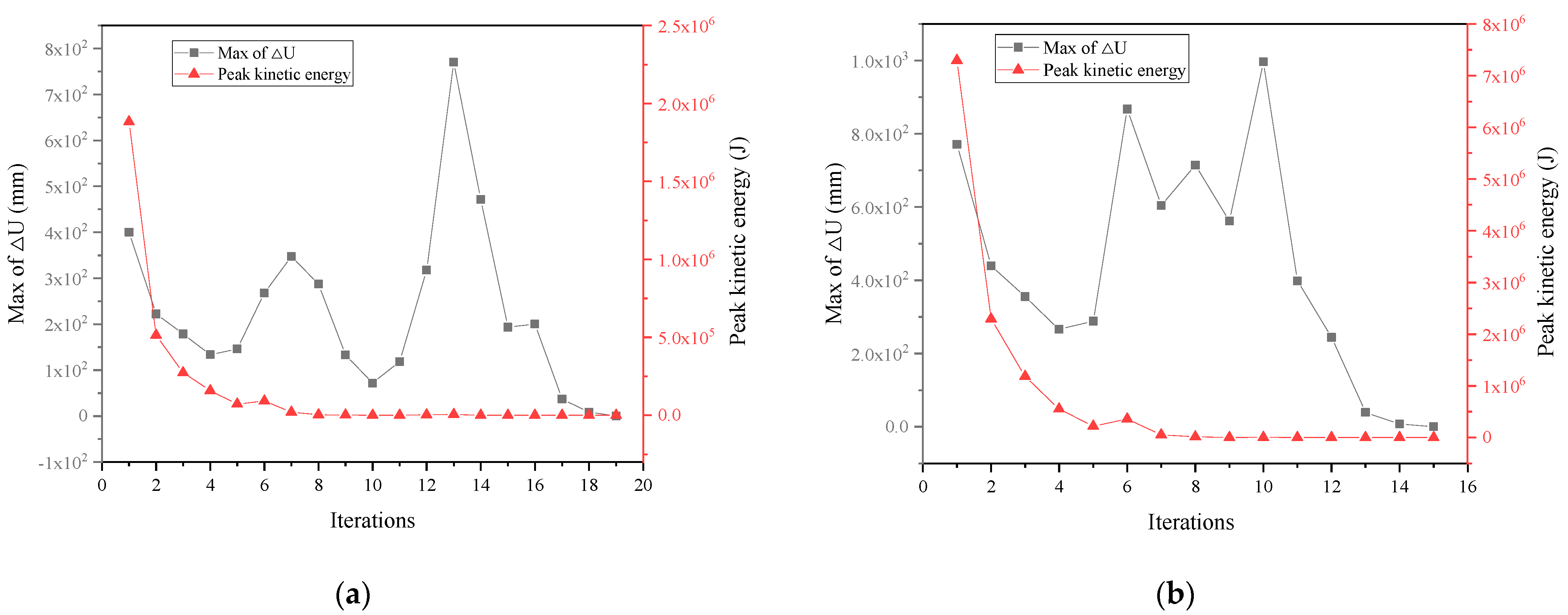
In order to check the convergence performance of the nonlinear iteration of the NDFEM, the inverse process of cable net hoisting in two stages, GK6 and GK7-GK11, was tested. That is, the cable network was lowered to the specified position by lengthening the traction cable. The iterative process is shown in
Figure 9. The convergence standard of the maximum adjustment of cable structure coordinates was set to 1 mm. With the progress of iteration, the peak kinetic energy of the cable net steadily decreased until it was close to 0 mm. The maximum value of cable structure coordinate adjustment oscillated in the early stage, gradually decreasing steadily in the later stage. Finally, the iteration was completed when it was less than 1 mm, and the structural nonlinear calculation converged.
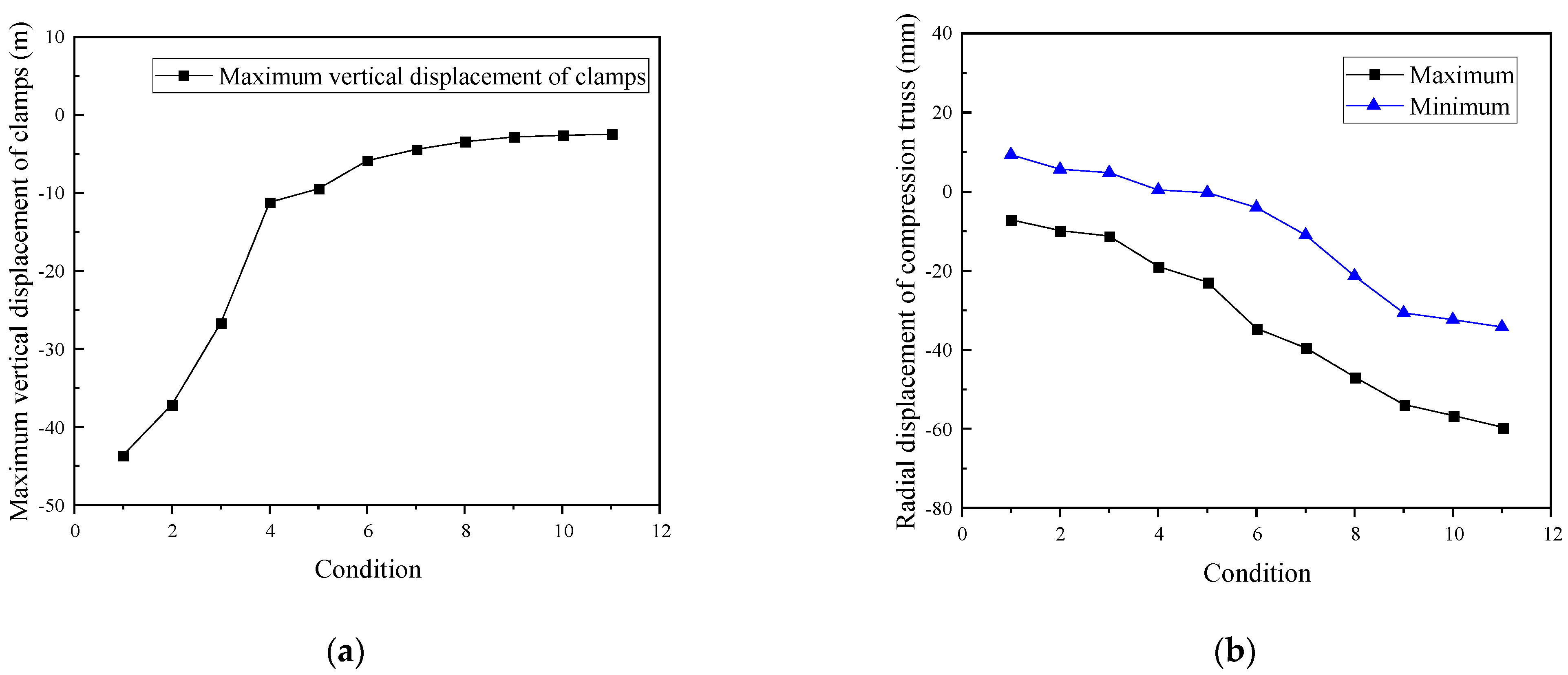
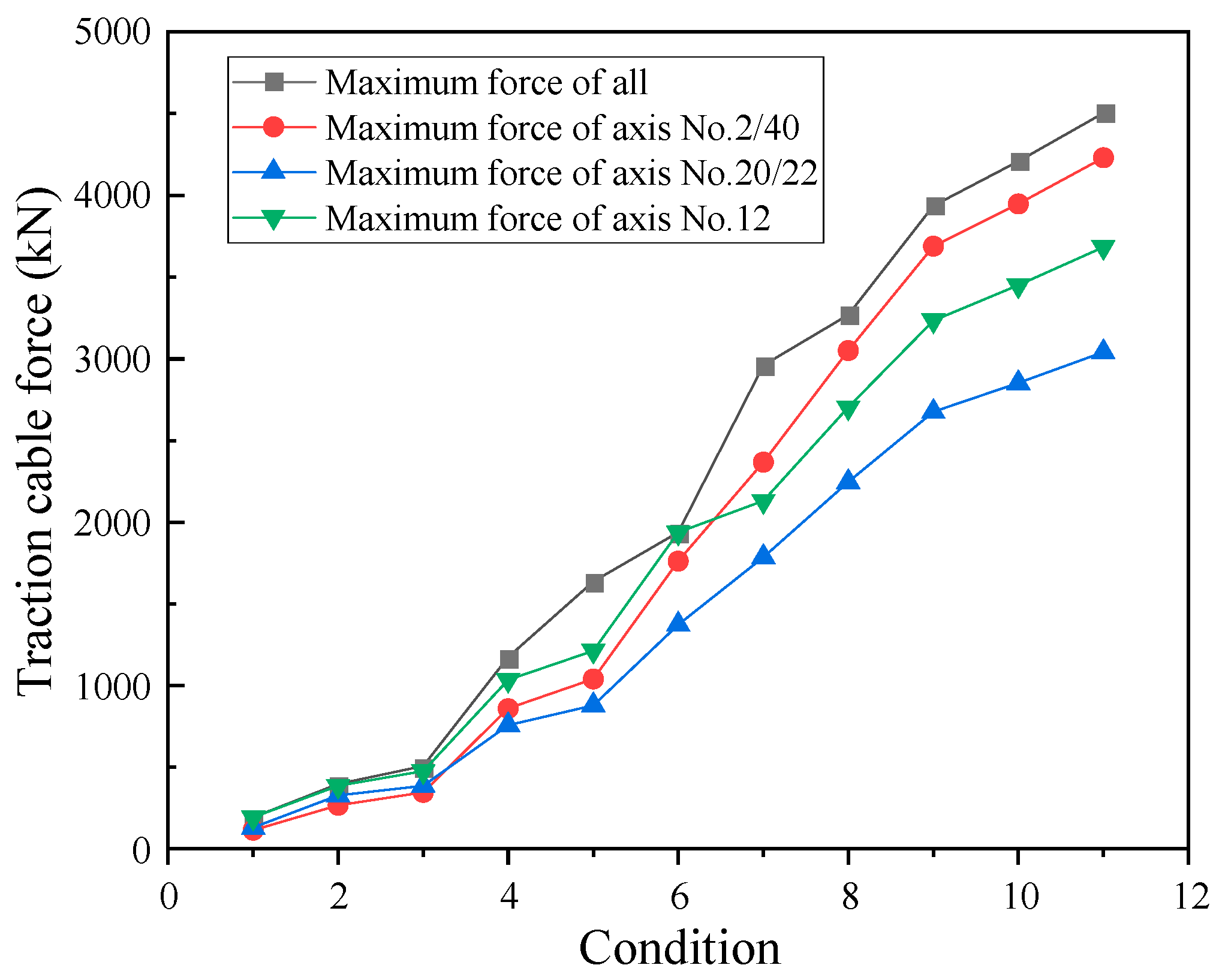
The NDFEM was applied to simulate the construction process of the cable structure in ANSYS. According to the results from ANSYS, we extracted the vertical displacement of the clamps and radial displacement of the outer compression truss, as shown in
Figure 10. The maximum value of the traction cables is shown in
Figure 11. From GK-1 to GK-4, it shows that the length change of the traction cables was relatively large and the elevation of the structure net rose rapidly, but the traction force varied little. In the meantime, the cable force transferred to the outer compression truss gradually, and the radial displacement of truss changed slowly. Starting with GK-4, there were 12 radial cables anchored, and the structure was close to being formed. The length of the traction cables changed less, and the cable net needed to be hoisted slowly because the traction cable force and radial displacement of the truss increased rapidly. It has been proven that the cable force of the single-layer cable net is very sensitive to the change in configuration when the structure approaches formation. It is also a characteristic of this full-tension structure. When the cable net accomplished tension (GK-11), the biggest value of cable force reached was 4504 kN, which is much less than the minimum breaking force of 24,200 kN. Furthermore, the forces of the traction cables in areas B and C were much less than those in the formed state.
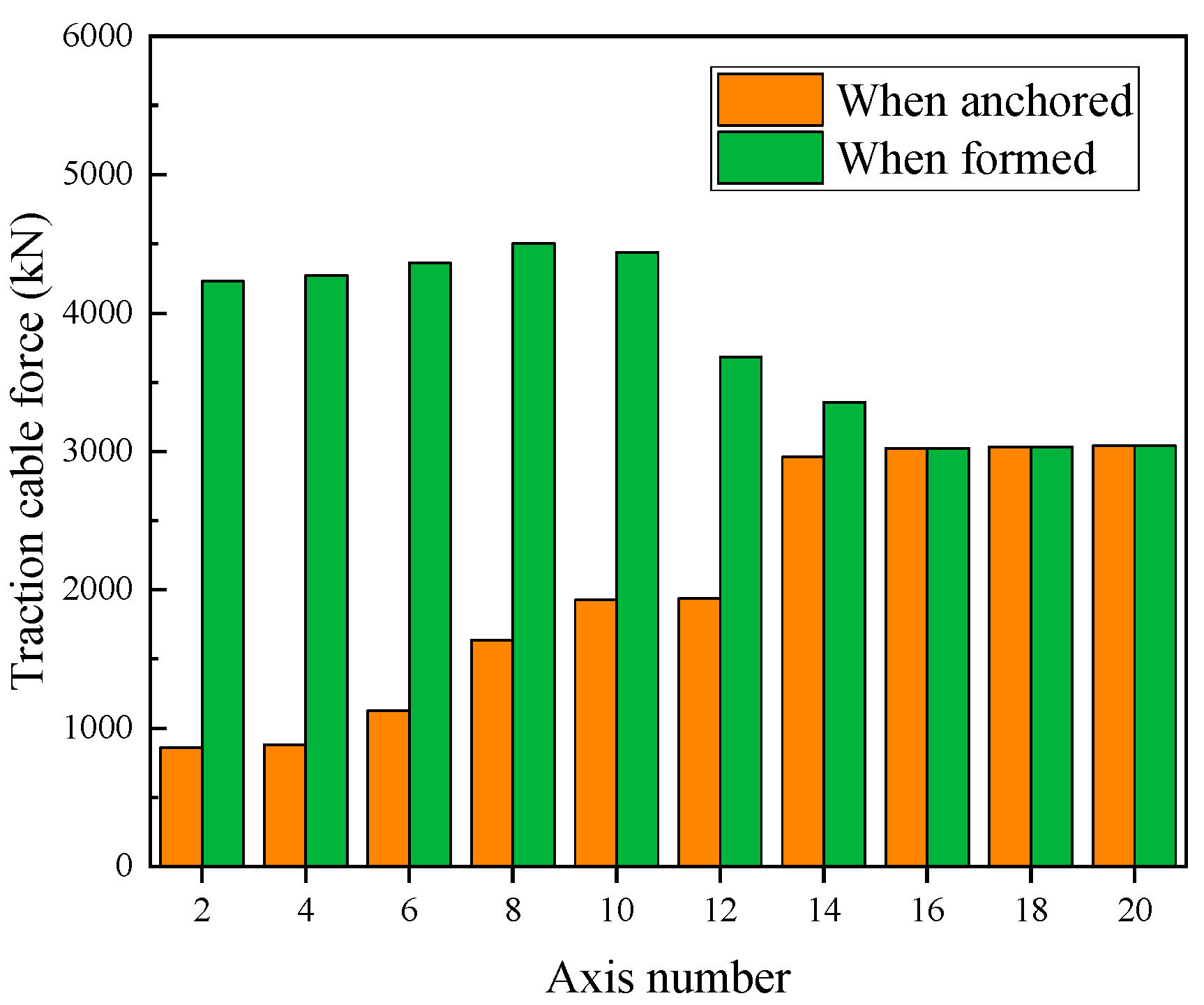
This engineering project is a quarter symmetrical structure, so the traction cable force in the symmetrical position is equal. After the axis number merged, the traction cable forces during construction were as shown in
Table 6, where the bold and underlined value indicates the cable force under the current condition. It shows that the forces of the traction cables in area B/C were 1000 kN lower than those in area A when the structure formed. Because the cables in area B/C were anchored first, the traction forces when anchored were much smaller than those when formed in axis no. 2–12, as shown in
Figure 12. Tensioning and anchoring in batches, compared to that synchronously, can decrease the traction forces and ensure the safety of cable construction. Furthermore, tensioning and anchoring in batches can reduce the labor cost of construction. All of these results prove the advantages of the method “tensioning and anchoring in batches”.
Equivalent stress of the outer compression truss was obtained to ensure that the stress of the steel did not exceed the limits when the structure net was hoisted. The maximum equivalent stress of the outer compression truss in each construction condition is shown in
Table 7. From GK-1 to GK-11, the equivalent stress of the outer compression truss increased, and the maximum value was 102.1 MPa, which was much lower than the design strength. It can thus be seen that the cable net and outer steel were safe.
To sum up, based on the NDFEM to analyze the construction process in ANSYS, the value and change in the cable net displacement, cable forces, and steel equivalent stress were obtained. The results showed that there was a large security redundancy and the construction method had a considerable advantage.


 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}