Real-Time Implementation of EEG Oscillatory Phase-Informed Visual Stimulation Using a Least Mean Square-Based AR Model



Abstract
1. Introduction
2. Materials and Methods
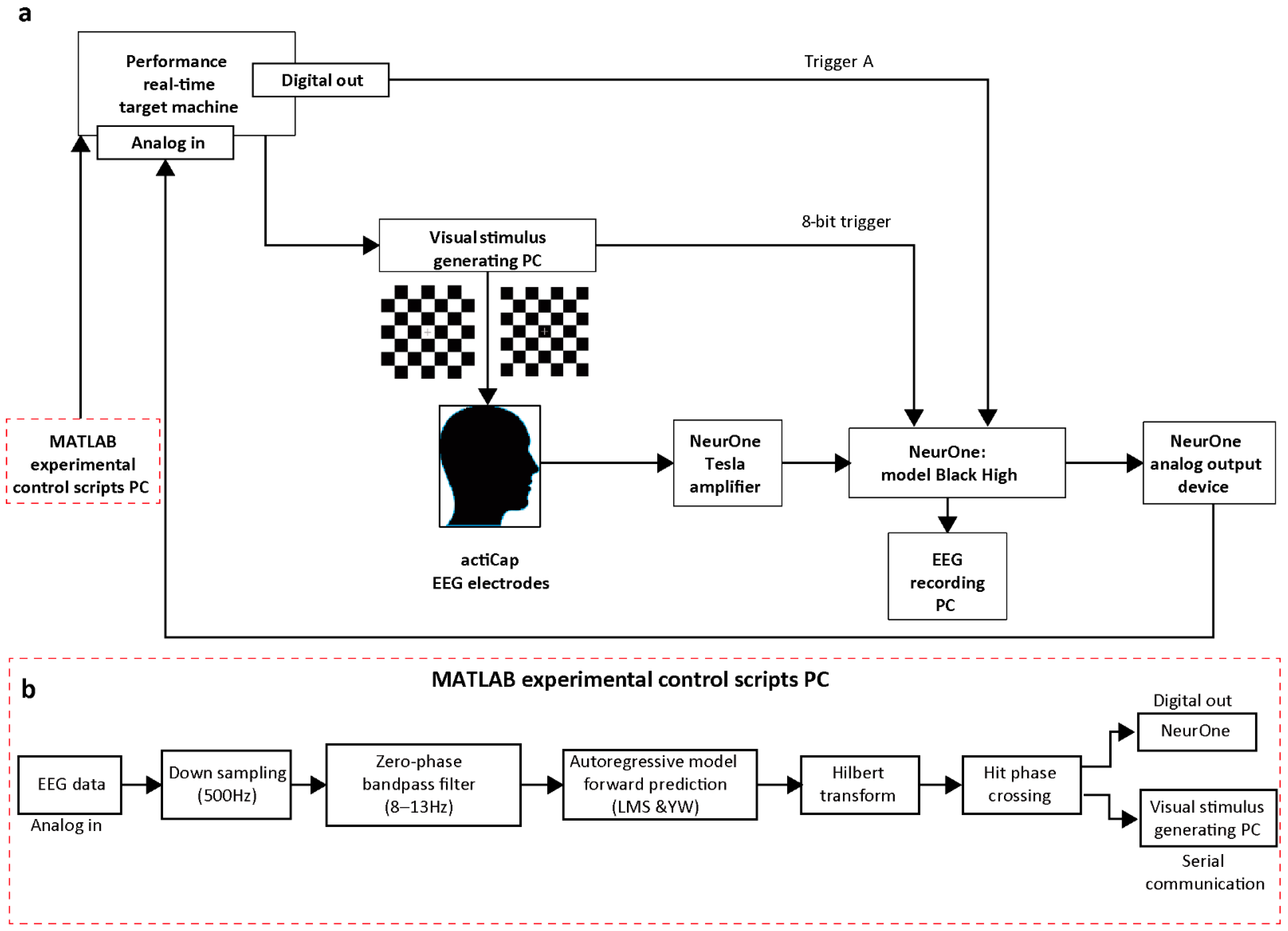
2.1. Implementation of a Closed-Loop System
2.2. Algorithm
- In each Simulink model, the raw EEG data are received as analog input via IO109 at a sample rate of 2 kHz and are downsampled to 500 Hz.
- The data are then delayed by 500 samples, and the mean of the data is calculated and subtracted from the original data. The data are then sent to the next step for filtering.
- The third step implements bandpass filtering. A two-pass finite impulse response (FIR) bandpass filter (filter order 128) with an 8–13 Hz frequency range is applied to the data, and the edges are removed.
- The fourth step is forward prediction. After trimming 85 samples from both sides, the remaining 330 samples are then used for forward prediction (85 samples). The YW forward prediction algorithm predicts the future and computes coefficients using Yule–Walker equations, whereas the LMS forward prediction algorithm uses an adaptive method to compute coefficients and then uses them in the AR equation. This step results in a predicted signal as an output. The model order for both methods is 30.
- The Hilbert transform is performed on resulting forward-predicted EEG data to determine the instantaneous phase at “time-zero”.
- The zero-phase crossing (a predetermined phase is crossed, with 0 and pi rad portraying positive and negative peaks, respectively) is monitored online, and a TTL signal is sent from the Performance real-time target machine via digital output module (IO203) and serial port (RS232). The Performance real-time target machine sends the TTL signal to the EEG recording PC via IO203, while at the same time, the TTL signal is sent via RS232 to the visual stimulus generating PC.
2.3. Autoregressive (AR) Model
2.4. Least Mean Square (LMS)
2.5. Instantaneous Frequency, Phase
2.6. Participants
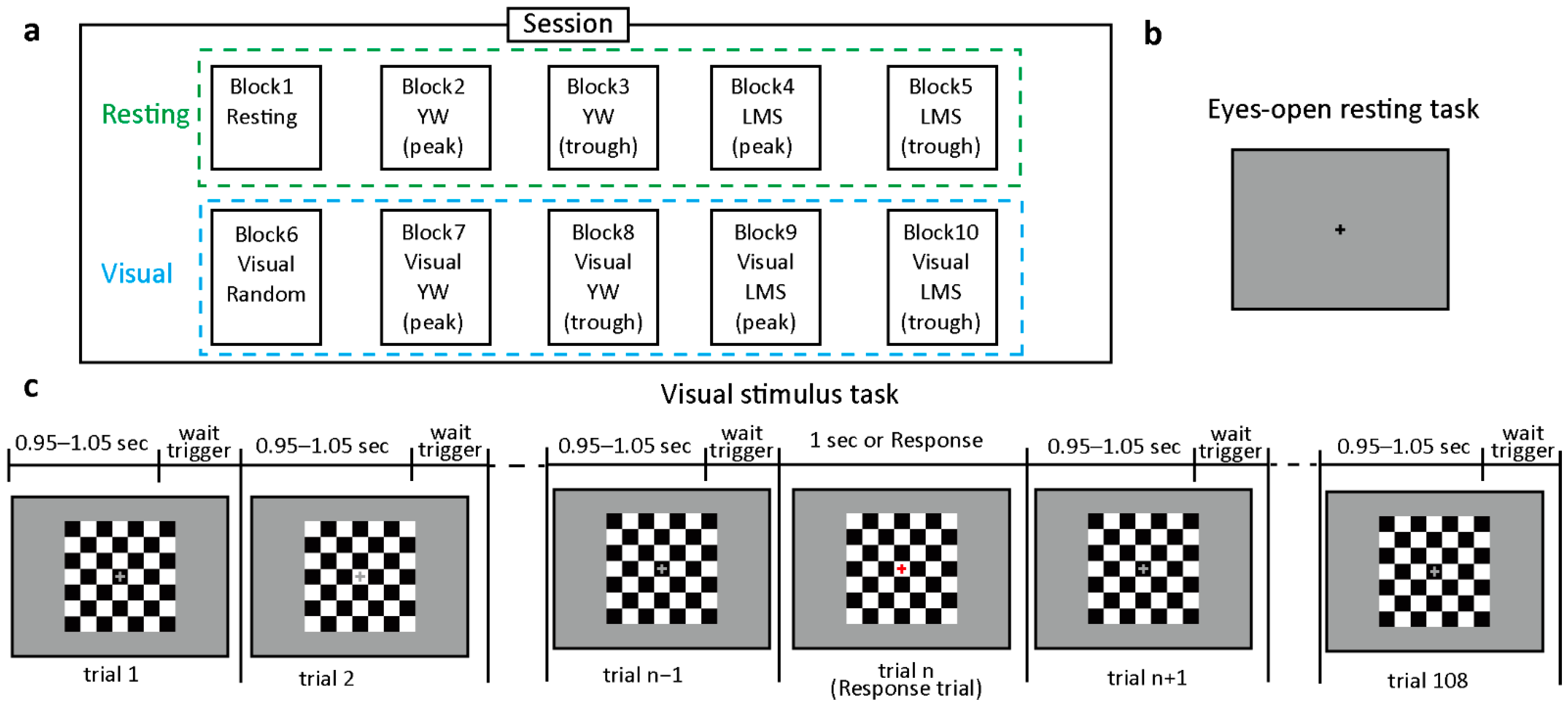
2.7. Experiment
2.8. EEG Recording and Preprocessing
2.9. Statistical Analysis
3. Results
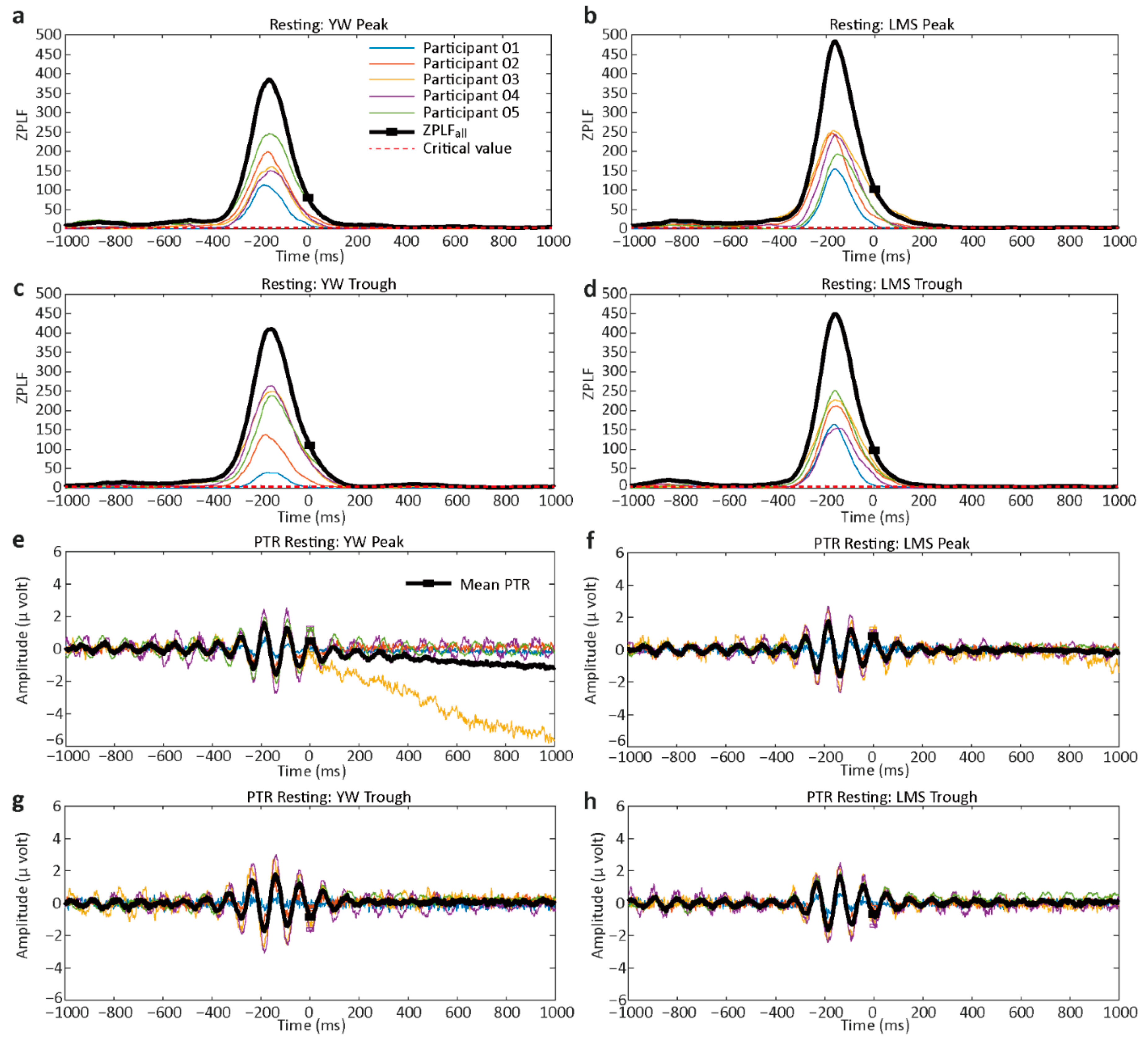
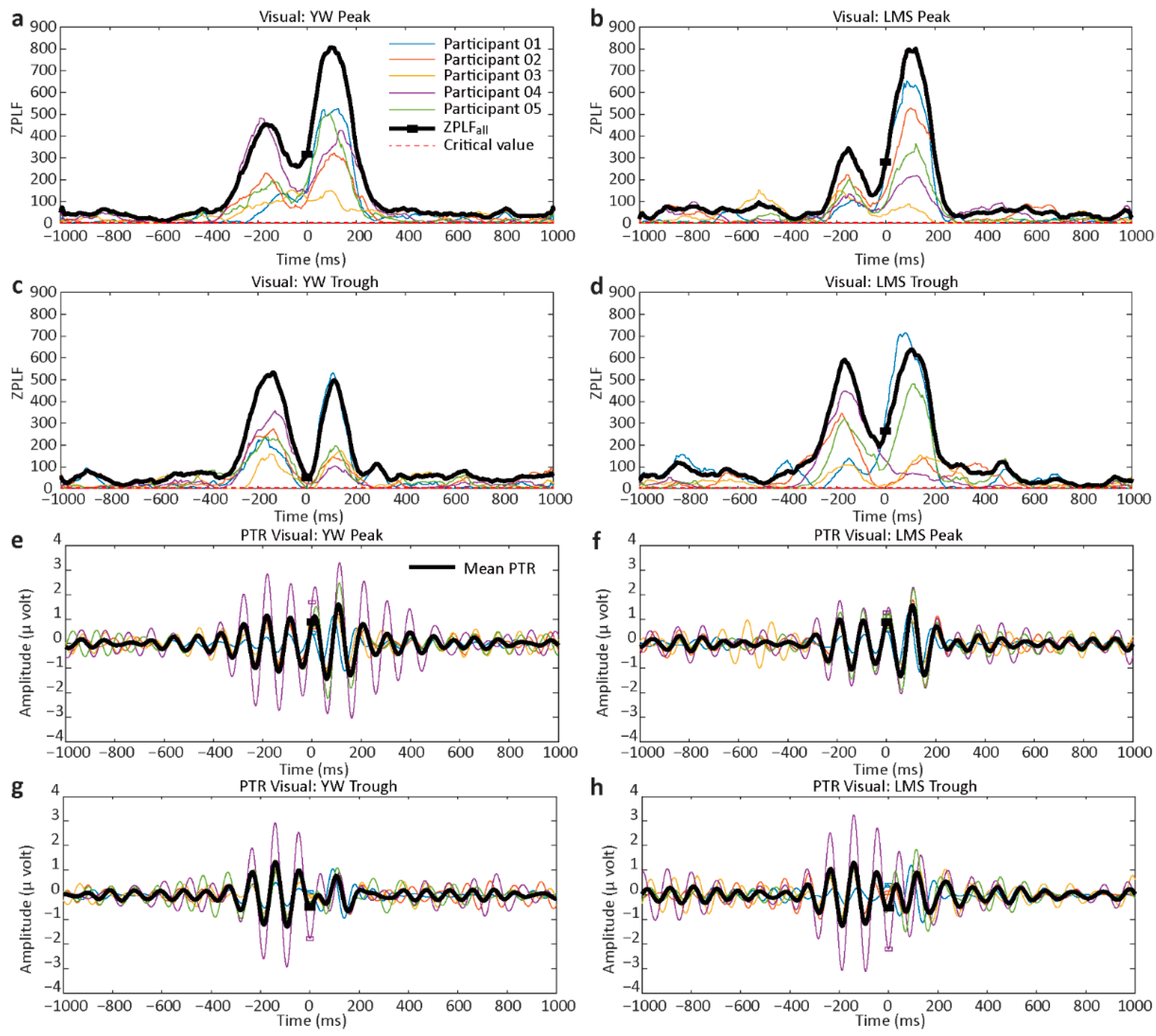
3.1. Phase-Locking Factor
3.2. Phase-Triggered Response (PTR)
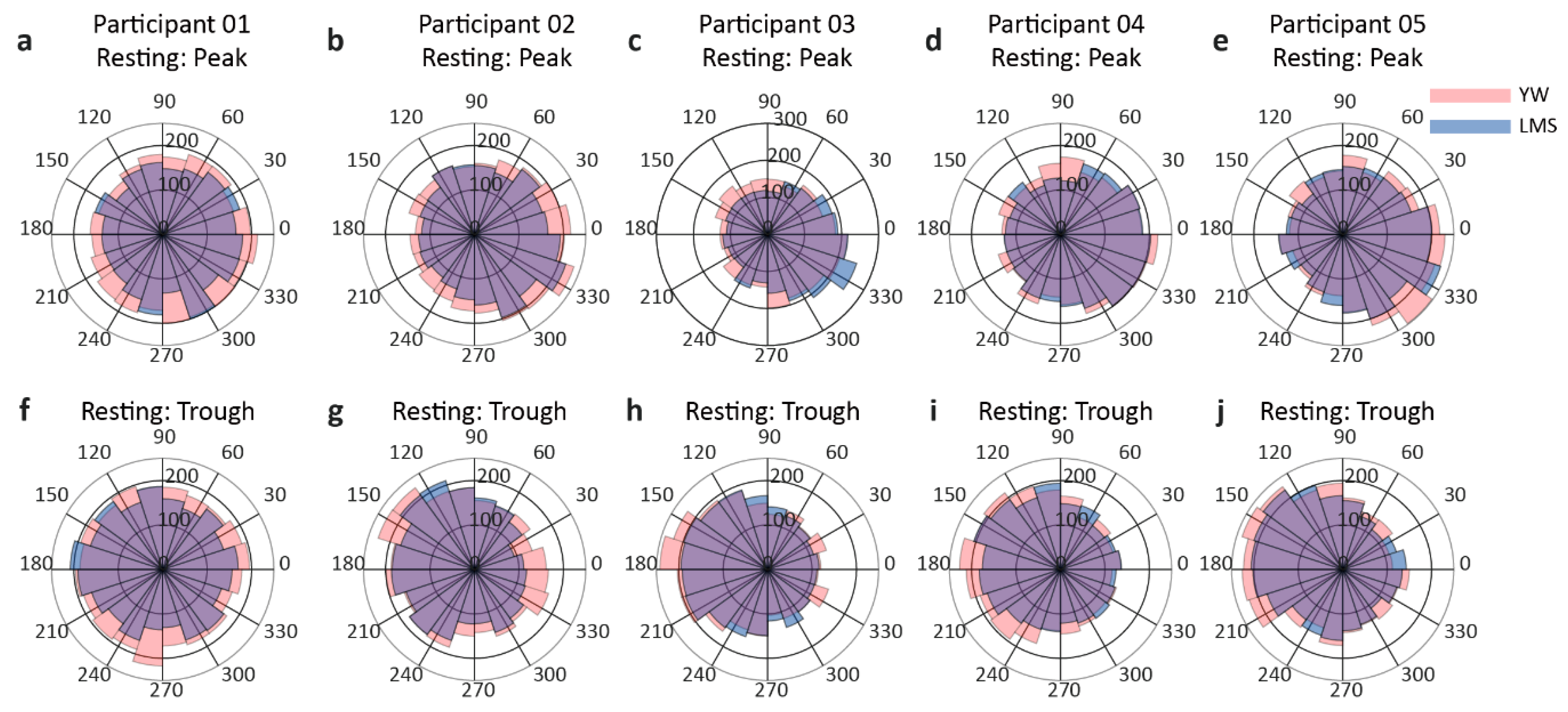
3.3. Resting Conditions
3.4. Visual Condition
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ziemann, U.; Reis, J.; Schwenkreis, P.; Rosanova, M.; Strafella, A.; Badawy, R.; Müller-Dahlhaus, F. TMS and drugs revisited 2014. Clin. Neurophysiol. 2015, 126, 1847–1868. [Google Scholar] [CrossRef] [PubMed]
- Hallett, M. Transcranial magnetic stimulation and the human brain. Nature 2000, 406, 147–150. [Google Scholar] [CrossRef] [PubMed]
- Zrenner, C.; Belardinelli, P.; Müller-Dahlhaus, F.; Ziemann, U. Closed-loop neuroscience and non-invasive brain stimulation: A tale of two loops. Front. Cell. Neurosci. 2016, 10, 92. [Google Scholar] [CrossRef] [PubMed]
- Ilmoniemi, R.J.; Kičić, D. Methodology for combined TMS and EEG. Brain Topogr. 2010, 22, 233–248. [Google Scholar] [CrossRef] [PubMed]
- Müller-Dahlhaus, F.; Vlachos, A. Unraveling the cellular and molecular mechanisms of repetitive magnetic stimulation. Front. Mol. Neurosci. 2013, 6, 50. [Google Scholar] [CrossRef]
- Mutanen, T.; Nieminen, J.O.; Ilmoniemi, R.J. TMS-evoked changes in brain-state dynamics quantified by using EEG data. Front. Hum. Neurosci. 2013, 7, 155. [Google Scholar] [CrossRef]
- Buzsáki, G.; Draguhn, A. Neuronal oscillations in cortical networks. Science 2004, 304, 1926–1929. [Google Scholar] [CrossRef]
- Gharabaghi, A.; Kraus, D.; Leao, M.T.; Spüler, M.; Walter, A.; Bogdan, M.; Rosenstiel, W.; Naros, G.; Ziemann, U. Coupling brain-machine interfaces with cortical stimulation for brain-state dependent stimulation: Enhancing motor cortex excitability for neurorehabilitation. Front. Hum. Neurosci. 2014, 8, 122. [Google Scholar] [CrossRef]
- Bundy, D.T.; Wronkiewicz, M.; Sharma, M.; Moran, D.W.; Maurizio, C.; Eric, C.L. Using ipsilateral motor signals in the unaffected cerebral hemisphere as a signal platform for brain–computer interfaces in hemiplegic stroke survivors. J. Neural. Eng. 2012, 9, 036011. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Neuper, C. Dynamics of sensorimotor oscillations in a motor task. In Brain-Computer Interfaces; Springer: Berlin/Heidelberg, Germany, 2009; pp. 47–64. [Google Scholar] [CrossRef]
- Kraus, D.; Naros, G.; Bauer, R.; Maria Teresa, L.; Ziemann, U.; Gharabaghi, A. Brain–robot interface driven plasticity: Distributed modulation of corticospinal excitability. Neuroimage 2016, 125, 522–532. [Google Scholar] [CrossRef]
- Ramos-Murguialday, A.; Broetz, D.; Rea, M.; Läer, L.; Yilmaz, O.; Brasil, F.L.; Liberati, G.; Curado, M.R.; Garcia-Cossio, E.; Vyziotis, A.; et al. Brain–machine interface in chronic stroke rehabilitation: A controlled study. Ann. Neurol. 2013, 74, 100–108. [Google Scholar] [CrossRef] [PubMed]
- Buetefisch, C.; Heger, R.; Schicks, W.; Seitz, R.; Netz, J. Hebbian-type stimulation during robot-assisted training in patients with stroke. Neurorehabil. Neural. Repair 2011, 25, 645–655. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.L.; Madhavan, R.; Rapoport, B.I.; Anderson, W.S. Real-time brain oscillation detection and phase-locked stimulation using autoregressive spectral estimation and time-series forward prediction. IEEE Trans. Biomed. Eng. 2011, 60, 753–762. [Google Scholar] [CrossRef] [PubMed]
- Zrenner, C.; Desideri, D.; Belardinelli, P.; Ziemann, U. Real-time EEG-defined excitability states determine efficacy of TMS-induced plasticity in human motor cortex. Brain Stimul. 2018, 11, 374–389. [Google Scholar] [CrossRef] [PubMed]
- Zrenner, C.; Galevska, D.; Nieminen, J.O.; Baur, D.; Stefanou, M.I.; Ziemann, U. The shaky ground truth of real-time phase estimation. Neuroimage 2020, 214, 116761. [Google Scholar] [CrossRef] [PubMed]
- Roux, S.G.; Cenier, T.; Garcia, S.; Litaudon, P.; Buonviso, N. A wavelet-based method for local phase extraction from a multi-frequency oscillatory signal. J. Neurosci. Methods 2007, 160, 135–143. [Google Scholar] [CrossRef][Green Version]
- McIntosh, J.R.; Sajda, P. Estimation of phase in EEG rhythms for real-time applications. J. Neural. Eng. 2020, 17, 034002. [Google Scholar] [CrossRef]
- Shakeel, A.; Tanaka, T.; Kitajo, K. Time-series prediction of the oscillatory phase of EEG signals using the least mean square algorithm-based AR model. Appl. Sci. 2020, 10, 3616. [Google Scholar] [CrossRef]
- Pardey, J.; Roberts, S.; Tarassenko, L. A review of parametric modelling techniques for EEG analysis. Med. Eng. Phys. 1996, 18, 2–11. [Google Scholar] [CrossRef]
- Tseng, S.Y.; Chen, R.C.; Chong, F.C.; Kuo, T.S. Evaluation of parametric methods in EEG signal analysis. Med. Eng. Phys. 1995, 17, 71–78. [Google Scholar] [CrossRef]
- Koo, B.; Gibson, J.D.; Gray, S.D. Filtering of colored noise for speech enhancement and coding. In Proceedings of the International Conference on Acoustics, Speech, and Signal Processing, Glasgow, UK, 23–26 May 1989; Volume 39, pp. 1732–1742. [Google Scholar] [CrossRef]
- Poularikas, A.D.; Ramadan, Z.M. Adaptive Filtering Primer with MATLAB, 1st ed.; CRC Press: Boca Raton, FL, USA, 2006; pp. 101–135. [Google Scholar]
- Boashash, B. Estimating and interpreting the instantaneous frequency of a signal. Fundam. Proc. IEEE 1992, 80, 520–538. [Google Scholar] [CrossRef]
- Delorme, A.; Makeig, S. EEGLAB: An open source toolbox for analysis of single-trial EEG dynamics including independent component analysis. J. Neurosci. Methods 2004, 134, 9–21. [Google Scholar] [CrossRef] [PubMed]
- Fisher, N.I. Statistical Analysis of Circular Data; Cambridge University Press: Cambridge, UK, 1995; pp. 69–70. [Google Scholar] [CrossRef]
- Mathewson, K.E.; Gratton, G.; Fabiani, M.; Beck, D.M.; RO, T. To see or not to see: Prestimulus α phase predicts visual awareness. Neurosci. Res. 2009, 29, 2725–2732. [Google Scholar] [CrossRef] [PubMed]
- Mazaheri, A.; Jensen, O. Posterior α activity is not phase-reset by visual stimuli. Proc. Natl. Acad. Sci. USA 2006, 103, 2948–2952. [Google Scholar] [CrossRef]
- Persson, T. A new way to obtain Watson’s U2. Scand. Stat. Theory Appl. 1979, 6, 119–122. [Google Scholar]
- Ueda, K.I.; Nishiura, Y.; Kitajo, K. Mathematical mechanism of state-dependent phase resetting properties of alpha rhythm in the human brain. Neurosci. Res. 2020, 156, 237–244. [Google Scholar] [CrossRef]
- Zarubin, G.; Gundlach, C.; Nikulin, V.; Bogdan, M. Real-time phase detection for EEG-based tACS closed-loop system. In Proceedings of the 6th International Congress on Neurotechnology, Electronics and Informatics, Seville, Spain, 20–21 September 2018; Volume 1, pp. 13–20. [Google Scholar] [CrossRef]
- Le Van Quyen, M.; Foucher, J.; Lachaux, J.P.; Rodriguez, E.; Lutz, A.; Martinerie, J.; Varela, F.J. Comparison of Hilbert transform and wavelet methods for the analysis of neuronal synchrony. J. Neurosci. Methods 2001, 111, 83–98. [Google Scholar] [CrossRef]
- Bajaj, V.; Pachori, R.B. Separation of rhythms of EEG signals based on Hilbert-Huang transformation with application to seizure detection. In Proceedings of the International Conference on Hybrid Information Technology, Daejeon, Korea, 23–25 August 2012; Volume 7425, pp. 493–500. [Google Scholar] [CrossRef]
- Lin, C.F.; Zhu, J.D. Hilbert–Huang transformation-based time-frequency analysis methods in biomedical signal applications. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2012, 226, 208–216. [Google Scholar] [CrossRef]
- Oh, S.L.; Hagiwara, Y.; Raghavendra, U.; Yuvaraj, R.; Arunkumar, N.; Murugappan, M.; Acharya, U.R. A deep learning approach for Parkinson’s disease diagnosis from EEG signals. Neural. Comput. Appl. 2018, 32, 10927–10933. [Google Scholar] [CrossRef]
- Li, F.; Li, X.; Wang, F.; Zhang, D.; Xia, Y.; He, F. A novel P300 classification algorithm based on a principal component analysis-convolutional neural network. Appli. Sci. 2020, 10, 1546. [Google Scholar] [CrossRef]
- Rosin, B.; Slovik, M.; Mitelman, R.; Rivlin-Etzion, M.; Haber, S.N.; Israel, Z.; Vaadia, E.; Bergman, H. Closed-loop deep brain stimulation is superior in ameliorating parkinsonism. Neuron 2011, 72, 370–384. [Google Scholar] [CrossRef] [PubMed]
- Little, S.; Brown, P. What brain signals are suitable for feedback control of deep brain stimulation in Parkinson’s disease? Ann. N. Y. Acad. Sci. 2012, 1265, 9–24. [Google Scholar] [CrossRef]
- Little, S.; Pogosyan, A.; Neal, S.; Zavala, B.; Zrinzo, L.; Hariz, M.; Foltynie, T.; Limousin, P.; Ashkan, K.; Fitzgerald, J.; et al. Adaptive deep brain stimulation in advanced Parkinson disease. Ann. Neurol. 2013, 74, 449–457. [Google Scholar] [CrossRef] [PubMed]
- Sun, F.T.; Morrell, M.J. Closed-loop neurostimulation: The clinical experience. Neurotherapeutics 2014, 11, 553–563. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Resting | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ID | Number of Trials | PLF | ZPLF | |||||||||
| YW Peak | LMS Peak | YW Trough | LMS Trough | YW Peak | LMS Peak | YW Trough | LMS Trough | YW Peak | LMS Peak | YW Trough | LMS Trough | |
| P01 | 3598 | 3156 | 3710 | 3276 | 0.057 | 0.059 | 0.019 | 0.047 | 11.872 | 11.102 | 1.432 | 7.378 |
| P02 | 3491 | 3093 | 3433 | 3075 | 0.104 | 0.103 | 0.075 | 0.126 | 37.831 | 32.895 | 19.778 | 51.678 |
| P03 | 3192 | 3038 | 3099 | 2993 | 0.090 | 0.171 | 0.155 | 0.149 | 26.283 | 89.706 | 74.474 | 66.55 |
| P04 | 3230 | 3089 | 3268 | 3053 | 0.101 | 0.125 | 0.146 | 0.107 | 33.569 | 48.528 | 70.241 | 35.50 |
| P05 | 3326 | 3159 | 3340 | 3139 | 0.146 | 0.122 | 0.155 | 0.133 | 71.307 | 47.381 | 80.566 | 55.752 |
| Mean | 3367.4 | 3107 | 3370 | 3107.2 | 0.100 | 0.116 | 0.110 | 0.113 | 36.172 | 45.922 | 49.298 | 43.371 |
| SD | 173.068 | 50.955 | 226.005 | 107.843 | 0.031 | 0.040 | 0.060 | 0.039 | 21.978 | 28.758 | 36.099 | 23.005 |
| Resting | ||||||
|---|---|---|---|---|---|---|
| ID | Mean Angle (rad) | Watson U2 | ||||
| YW Peak | LMS Peak | YW Trough | LMS Trough | YW vs. LMS Peak | YW vs. LMS Trough | |
| P01 | −0.475 | −0.154 | −3.009 | 2.580 | 0.059 | 1.125 |
| P02 | −0.228 | −0.108 | 2.821 | 2.761 | 0.054 | 0.273 |
| P03 | −0.350 | −0.369 | 2.923 | 2.956 | 0.570 | 0.099 |
| P04 | −0.271 | −0.337 | 2.920 | 2.613 | 0.078 | 0.207 |
| P05 | −0.216 | −0.333 | 2.872 | 2.827 | 0.887 | 0.064 |
| Mean | −0.297 | −0.260 | 2.961 | 2.747 | ||
| Visual | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ID | Number of Trials | PLF | ZPLF | |||||||||
| YW Peak | LMS Peak | YW Trough | LMS Trough | YW Peak | LMS Peak | YW Trough | LMS Trough | YW Peak | LMS Peak | YW Trough | LMS Trough | |
| P01 | 3780 | 3671 | 3788 | 3646 | 0.204 | 0.264 | 0.062 | 0.302 | 158.59 | 255.83 | 14.760 | 333.357 |
| P02 | 3772 | 3553 | 3776 | 3575 | 0.166 | 0.207 | 0.078 | 0.047 | 105.10 | 153.43 | 23.016 | 8.146 |
| P03 | 3630 | 3420 | 3760 | 3385 | 0.176 | 0.107 | 0.037 | 0.071 | 112.73 | 39.500 | 5.326 | 17.461 |
| P04 | 3745 | 3762 | 3472 | 3461 | 0.194 | 0.150 | 0.141 | 0.193 | 142.02 | 85.397 | 69.912 | 128.927 |
| P05 | 3774 | 3549 | 3776 | 3588 | 0.224 | 0.162 | 0.035 | 0.170 | 190.26 | 93.699 | 4.871 | 103.984 |
| Mean | 3740.2 | 3591 | 3714.4 | 3531 | 0.193 | 0.178 | 0.071 | 0.157 | 141.74 | 125.57 | 23.577 | 118.384 |
| SD | 63.057 | 130.47 | 135.870 | 105.624 | 0.022 | 0.059 | 0.043 | 0.102 | 34.720 | 83.342 | 26.962 | 131.216 |
| Visual | ||||||
|---|---|---|---|---|---|---|
| ID | Mean Angle (rad) | Watson U2 | ||||
| YW Peak | LMS Peak | YW Trough | LMS Trough | YW vs. LMS Peak | YW vs. LMS Trough | |
| P01 | 0.478 | 0.158 | 0.708 | 0.449 | 0.054 | 0.338 |
| P02 | −0.481 | −0.407 | −2.030 | −1.090 | 0.031 | 0.951 |
| P03 | −0.169 | −0.117 | 2.643 | −2.112 | 0.046 | 0.554 |
| P04 | −0.655 | −0.603 | −2.810 | −3.067 | 0.064 | 0.069 |
| P05 | −0.883 | −0.657 | −2.673 | −2.167 | 0.093 | 0.151 |
| Mean | −0.355 | −0.327 | −2.918 | −1.882 | ||
| Total Participants = 5 | Resting | Visual | ||||||
|---|---|---|---|---|---|---|---|---|
| YW Peak | LMS Peak | YW Trough | LMS Trough | YW Peak | LMS Peak | YW Trough | LMS Trough | |
| Participants | 5/5 | 5/5 | 4/5 | 5/5 | 5/5 | 5/5 | 5/5 | 5/5 |
| Percentage | 100% | 100% | 80% | 100% | 100% | 100% | 100% | 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shakeel, A.; Onojima, T.; Tanaka, T.; Kitajo, K. Real-Time Implementation of EEG Oscillatory Phase-Informed Visual Stimulation Using a Least Mean Square-Based AR Model. J. Pers. Med. 2021, 11, 38. https://doi.org/10.3390/jpm11010038
Shakeel A, Onojima T, Tanaka T, Kitajo K. Real-Time Implementation of EEG Oscillatory Phase-Informed Visual Stimulation Using a Least Mean Square-Based AR Model. Journal of Personalized Medicine. 2021; 11(1):38. https://doi.org/10.3390/jpm11010038
Chicago/Turabian StyleShakeel, Aqsa, Takayuki Onojima, Toshihisa Tanaka, and Keiichi Kitajo. 2021. "Real-Time Implementation of EEG Oscillatory Phase-Informed Visual Stimulation Using a Least Mean Square-Based AR Model" Journal of Personalized Medicine 11, no. 1: 38. https://doi.org/10.3390/jpm11010038
APA StyleShakeel, A., Onojima, T., Tanaka, T., & Kitajo, K. (2021). Real-Time Implementation of EEG Oscillatory Phase-Informed Visual Stimulation Using a Least Mean Square-Based AR Model. Journal of Personalized Medicine, 11(1), 38. https://doi.org/10.3390/jpm11010038