Abstract
In this research paper, we consider a model of the fractional Cauchy–Euler-type equation, where the fractional derivative operator is the Caputo with order . The problem also constitutes a class of examples of the Cauchy problem of the Bagley–Torvik equation with variable coefficients. For proving the existence and uniqueness of the solution of the given problem, the contraction mapping principle is utilized. Furthermore, a numerical method and an algorithm are developed for obtaining the approximate solution. Also, convergence analyses are studied, and simulations on some test problems are given. It is shown that the proposed method and the algorithm are easy to implement on a computer and efficient in computational time and storage.
Keywords:
Cauchy–Euler equation; existence and uniqueness; convergence analysis; algorithm; collocation method MSC:
34A08; 65D07; 65L05
1. Introduction
The modeling of numerous phenomena in diverse scientific fields leads us to consider conventional or fractional time-dependent differential equations in the modeling domain. In general, finding analytic solutions of these modeled problems is a difficult task, or even not possible. Hence, numerical methods are needed, such as the latest approaches [1,2].
In 1984, in [3], the fractional derivative was shown to arise naturally for the description of certain motions of a Newtonian fluid. Further, the authors found that a fractional derivative relationship can be identified in the solution to a classic problem in the motion of viscous fluids, and they proposed the fractional differential equation which was after called the Bagley–Torvik equation. Recently, the fractional Bagley–Torvik equations with variable coefficients using the Riemann–Liouville fractional operator
where , and are the given functions, were considered in [4]. The uniqueness of the solution was investigated by converting the above equation to a Volterra integral equation. To prove the uniqueness of the solution, a contraction operator was used. Also, a piecewise Taylor series expansion method was employed for the solution. Further, in [5] a variable coefficient generalized Bagley–Torvik equation with a fractional integral boundary condition was studied. The Riemann–Liouville fractional derivative operation was employed, and the Fredholm integral equations of the second kind were derived. For the approximate solution, a piecewise Taylor series expansion method was used.
Additionally, fractional calculus has been used in studies of transient electric circuit analysis and electrical impedance spectroscopy to the resistor–capacitor (RC) circuit as well as in many fields of sciences and engineering, including rheology, diffusive transport, electromagnetic theory, probability, and so on; see [6,7]. Recently, some studies were conducted on the existence and uniqueness of the solutions to models of fractional Cauchy–Euler equations (FrC-E), also known as Euler-type equations. Next, we mention some existing analytic methods for the solutions of FrC-E type equations given in the literature. Euler-type fractional differential equations were given in [8] with the left and right Liouville derivatives of the fractional order as follows:
with real constants . In their method, two linear non-homogeneous ordinary differential equations were studied using the direct and inverse Mellin integral transforms (see [9] for Mellin integral transform). They gave a general approach to deduce the solution of Euler-type equations. The solution of specific cases were given in terms of the Euler psi functions, Gauss hypergeometric function, and of the generalized Wright functions.
Later, ref. [10] proposed an analytic method for solving the homogeneous fractional differential equation of the Euler-type equation
for and with the fractional derivatives and complex coefficient on the positive half-line . is the left Riemann–Liouville fractional derivative of the complex order , . The solution of the homogeneous differential equation of the Euler type was found by applying the Mellin integral transform under some conditions on the exact solution y.
In [11], the solution in closed form of the linear non-homogeneous differential equations
was given, with and complex on a positive half-axis . One-dimensional direct and inverse Mellin integral transform and were used with the residue theory to establish explicit solutions in terms of special cases of the generalized wright function , generalized hypergeometric function , and Euler psi function; see details in [12]. An analytic solution of the Euler-type equation
was given in [13] with complex on the positive half axis = . Further, general solutions were investigated using the direct and inverse Mellin transforms, the residue theory, and the properties of fractional derivatives and the Euler psi function.
The main contribution of this research is that we give a model of the fractional Cauchy–Euler (FrC-E)-type problem, constituting a class of examples of the Cauchy problem of the Bagley–Torvik equation with variable coefficients as follows:
where , are the given constants, and , is the Caputo fractional derivative defined as
also, and and . Further, f is a given continuous function. The proposed problem also extends the classical Cauchy–Euler equation [14] to the Caputo fractional model problem. Additionally, we prove the existence and uniqueness of the solution of the given problem by using the contraction mapping principle. Some exhaustive studies on the existence of solutions to boundary value problems include [15,16,17], and related recent works on fractional model problems include [18,19,20].
In accordance with applications of fractional Cauchy–Euler’s equations, some examples are as follows:
- Engineering: They are often used in structural engineering to model the behavior of beams and columns under load, where the stiffness of the material varies with position.
- Physics: In quantum mechanics and wave propagation, Cauchy–Euler equations can describe the behavior of systems with varying potentials or media properties.
- Control systems: They are applied in control theory to design systems with variable parameters, enhancing the stability and response of control systems.
- Fluid dynamics: These equations can model fluid flow where the fluid properties change with position, such as in varying temperature or pressure conditions.
- Economics: In financial mathematics, they can be used to model economic systems with time-varying interest rates or other dynamic parameters.
These applications demonstrate the versatility and importance of Cauchy–Euler equations in modeling and solving complex, real-world problems across various disciplines. The classical Cauchy–Euler problem may be solved by using variable transformation that reduces the problem to linear differential equation with constant coefficients. However, variable transformation for (1) may lead to more complicated equations because the Caputo fractional derivative does not certify the classical Leibniz rule. Moreover, the computational cost of the analytic solution is very high even if it is evaluated at a few discrete points. Therefore, numerical approximations of (1) are inevitable, and this motivated us to established a numerical method for the solution. It is well known that collocation methods are continuous methods that produce approximations at discrete points, but many discrete methods cannot be used to obtain continuous approximations such as extrapolation and finite difference methods, and many Runge–Kutta methods. For this reason, they are inefficient for problems requiring globally continuous differentiable functions as approximations of the unknown solution; see [21]. Furthermore, in general, collocation methods are simple and easy to code. Some of the recent studies on collocation methods are [22,23].
Motivated by the above, the second aim of the research is to provide a collocation method and an algorithm for the numerical solution of (1). Hence, the research is organized as follows: In Section 2, the existence and uniqueness of the solution to the given (FrC-E) problem (1) is given. In Section 3, a collocation method and an algorithm are developed for the approximate solution of (1). Also, the accuracy and convergence analysis are studied in Section 4. It is proved that if the exact solution , where and m is the number of collocation parameters that we have considered for the realization, then the numerical solution is of order of accuracy. In Section 5, the numerical simulation of the proposed method and the algorithm are given on several constructed examples. The numerical results prove to be consistent with the theoretical results and demonstrate the efficiency and applicability of the method. Finally, in Section 6, the conclusion and some expected future work are given.
2. The Existence and Uniqueness
In order to investigate the existence and uniqueness of solution of Equation (1), we define a max metric containing , and prove that any two solutions of Equation (1) are equivalent in the metric space . Further, we show that a solution sequence of Equation (1) is a Cauchy sequence in the metric space. Setting , we rewrite Equation (1) in the form
where exists and is continuous, and is continuous in the interval . Here, and are real numbers. For the same value of , the following equations are equivalent to Equation (1).
Lemma 1.
Let , then the initial value problem (1) is equivalent to the following equations, provided that exists and is continuous, and is continuous in the interval .
- (a)
- (b)
- Moreover, for ,
Proof.
- (b)
- To prove part (b), we first differentiate both sides of Equation (4):
For and , by applying the Caputo derivative, we obtain
We change the order of integration in the iterative integral to obtain
The proof is complete. □
Let be a set of twice continuously differentiable functions on . We consider the metric space coupled with the max metric
Theorem 1.
Assume that . Equation (3) has only one solution in defined on the interval .
Proof.
It is clear that
Define max and choose T such that . Define an operator as follows:
Then,
and
Similarly,
For small , we have
Thus, there exist such that max , and the operator is a construction. By the Banach fixed-point theorem, has a unique fixed point in Y and consequently the Equation (3) has a unique solution on . By repeating this process multiple times, we arrive at a unique solution on . □
3. The Numerical Method and Algorithm
Let be a given uniform mesh on and set and , for . The solution y of the problem (1) will be approximated by an element , where . Also, presents the space of all real polynomials of a degree not exceeding . Let
and being the collocation parameters, the collocation solution satisfies the following collocation problem:
Let , then on each subinterval , the collocation solution satisfying (10) and (11) is given by
We present as follows:
Also,
In a similar way, we have
We mention that the papers [22,24,25,26,27,28,29] studied the different applications of collocation methods. First, we give the analogue of the collocation method for the numerical solution of the proposed model of the fractional Cauchy–Euler (FrC-E) problem by applying the operator (16) on the collocation function of (12) for when , for which we obtain
Here, is the Gauss Hypergeometric function. Also,
Next, we rewrite Equation (19) in matrix representation as
where and with entries given as
for . We remark from the above that at , the vector is known from the initial conditions and is given as follows:
Similarly, vectors and are defined by
For , the continuity condition on , which gives the relationship between the known vectors and the unknown vector , is given by
where
See [22,30,31,32] for details and the references therein. Analogously, when , the following system is obtained from Equation (10) when evaluated at ,
Writing Equation (26) in matrix form, we have
where is the same matrix as given in (21) and and The entries of and are as follows:
. Next, we give Algorithm 1 for finding the solution of problem (1) as follows:
| Algorithm 1 A numerical approach for finding the solution of problem (1) |
|
4. Convergence Analysis
Lemma 2.
Consider a uniform sequence of meshes for and let . Then, for and for and for all
Proof.
Further, since and based on the uniform grid, we have
□
Lemma 3.
Let the assumptions of Lemma 2 hold, then
Proof.
□
Theorem 2.
Assume that
- (a)
- are distinct collocation parameters (which may be chosen as M-CP or G-LP as given in Algorithm 1) satisfying .
- (b)
- The exact solution y of (1) satisfies .
- (c)
- (d)
Proof.
From assumption (b), we have and hence and . For simplicity, we will use the notation and Thus, we have, using Peano’s Theorem [21] for on ,
with , and the polynomials
denote the Lagrange fundamental polynomials with respect to the (distinct) collocation parameters Also, the Peano remainder term is
and
Here, if and for Then, the local Lagrange representation of on is
where
and
The collocation solution satisfies the collocation Equations (10) and (11), and the local representation of is
where . The local function (41) can also be presented as (12). Let the collocation error be on . Subtracting (41) from (40) gives
for where Further,
where
Using that and and that , are continuous applying recursion and evaluating at gives
Next, satisfies the following equation at
Then, evaluating (45) at gives
Further, evaluating (42) and (43) at and using (47)–(50), we obtain the following algebraic system of equations for :
The system of Equation (51) can be presented in the matrix form
where and is an invertible diagonal matrix, and have bounded entries and and with the entries
Since , and using (46) and Lemmas 2 and 3, there exists a constant such that Further, for sufficiently small , the linear system (52) has a unique solution. Furthermore, we take . Then, whenever h, for some , there exists a constant so that the uniform bound
holds. Also, from Lemma 3 there exist a positive constant that . Then, from (52) and using , we obtain
and it follows that
Hence, the inequality (35) is obtained. Further, for , the proof is analogous. □
5. Applications
All the computations in this section are carried out on an HP Laptop (notebook) with properties 8 GB RAM INTEL 17 and 1255U 3.5 GHZ and 512 GB NVME M.2SSD and using Wolfram Mathematica 13.3 and MATLAB R2024a in double precision. For the ease of implementation, we take the number of collocation parameters to be . The following notations are used in tables and figures.
The Gauss hypergeometric function is defined in the unit disk as the sum of the hypergeometric series [33]
where ; ; and is the Pochhammer symbol. The error function is defined as [34]
where y is the exact solution, and is the approximate solution that defines the absolute error function:
are the square norm error and the maximum absolute error, respectively. Also, the local and global order of convergence are defined by
Example 1.
This is an example where the regularity parameter , being a fractional number, is not fixed. We consider
with the exact solution and non-homogeneous term as given below:
In this problem, for the application of the given Algorithm 1, we take and the regularity parameter . Table 1 shows the maximum absolute error and square norm error and the order of convergence and by using the mean Chebyshev points (M-CP) for Example 1 with respect to several values of N. Additionally, Table 2 presents the analogous quantities for the same values of the parameters obtained by using the Gauss–Legendre points (G-LP). Furthermore, the last columns of both Table 1 and Table 2 show the determinant of the matrix . These tables justify that the local and global orders of convergence are at least when the exact solution .

Table 1.
The error norms, convergence orders, and for Example 1 obtained by using the M-CP.
Table 2.
The error norms, convergence orders, and for Example 1 obtained by using the G-LP.
Figure 1 shows the approximate solution , and Figure 2 illustrates the absolute error function for Example 1 when with respect to using the M-CP as collocation parameters.
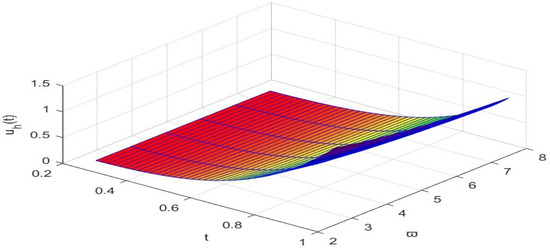
Figure 1.
The graph of the approximate solution for Example 1 when with respect to using the M-CP.
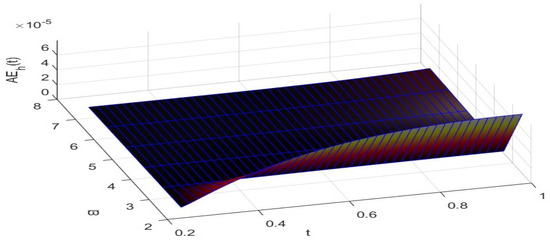
Figure 2.
The graph of the for Example 1 when with respect to using the M-CP.
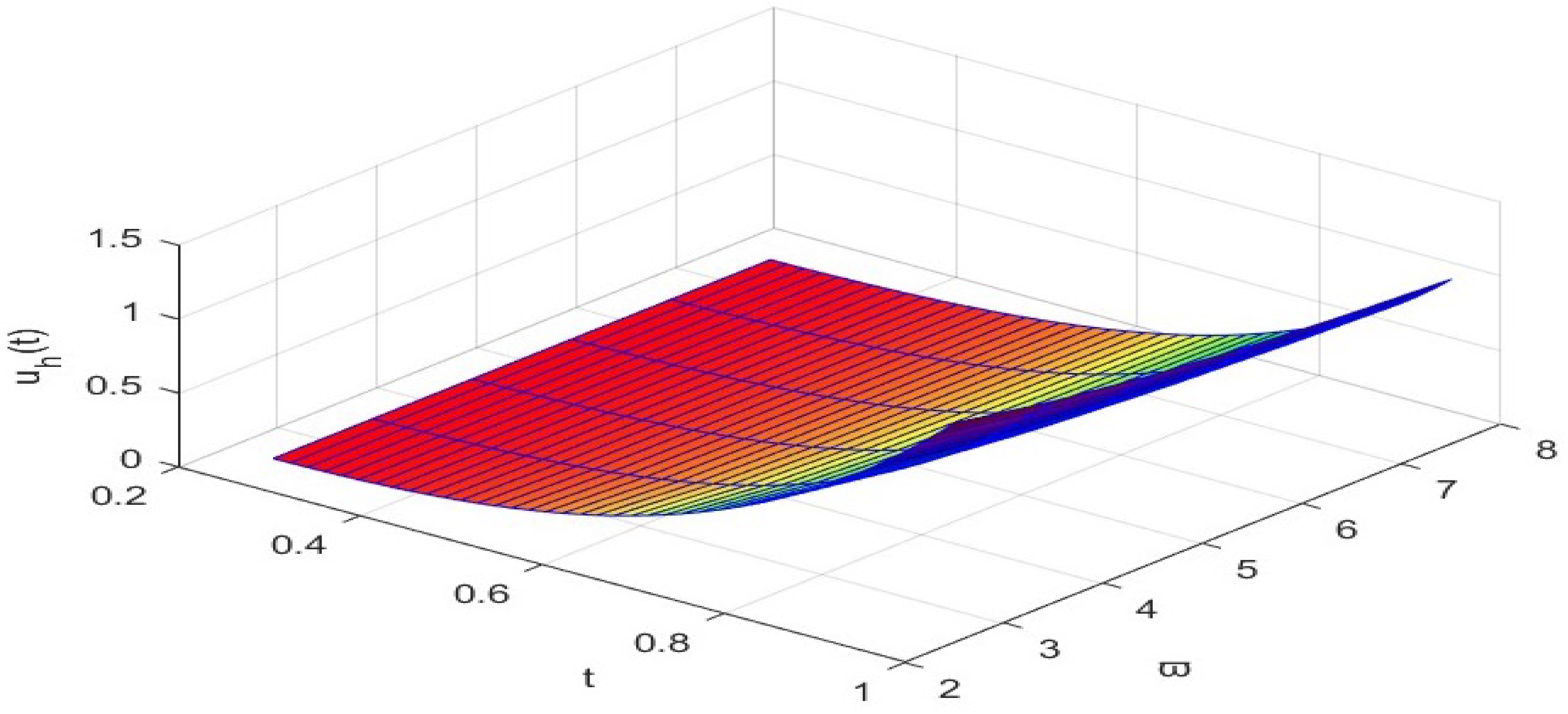
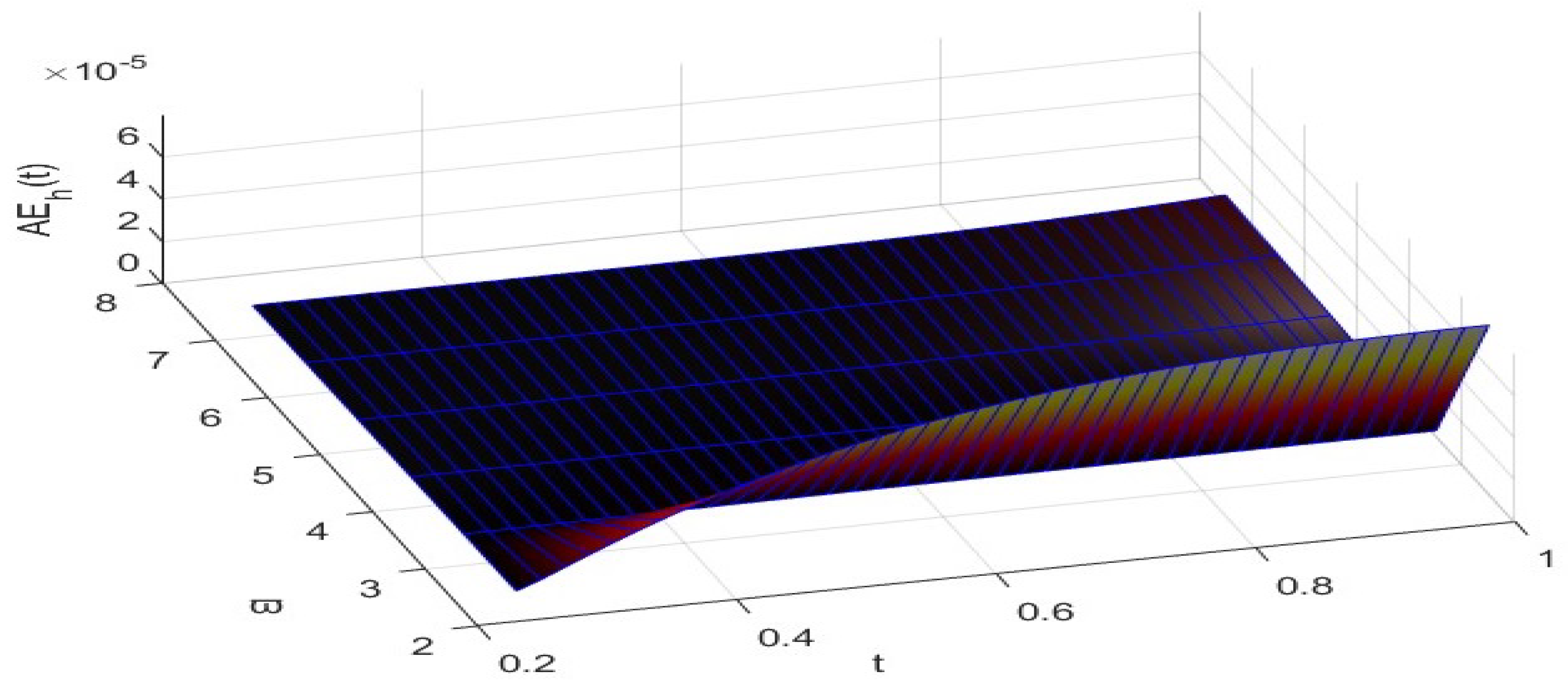
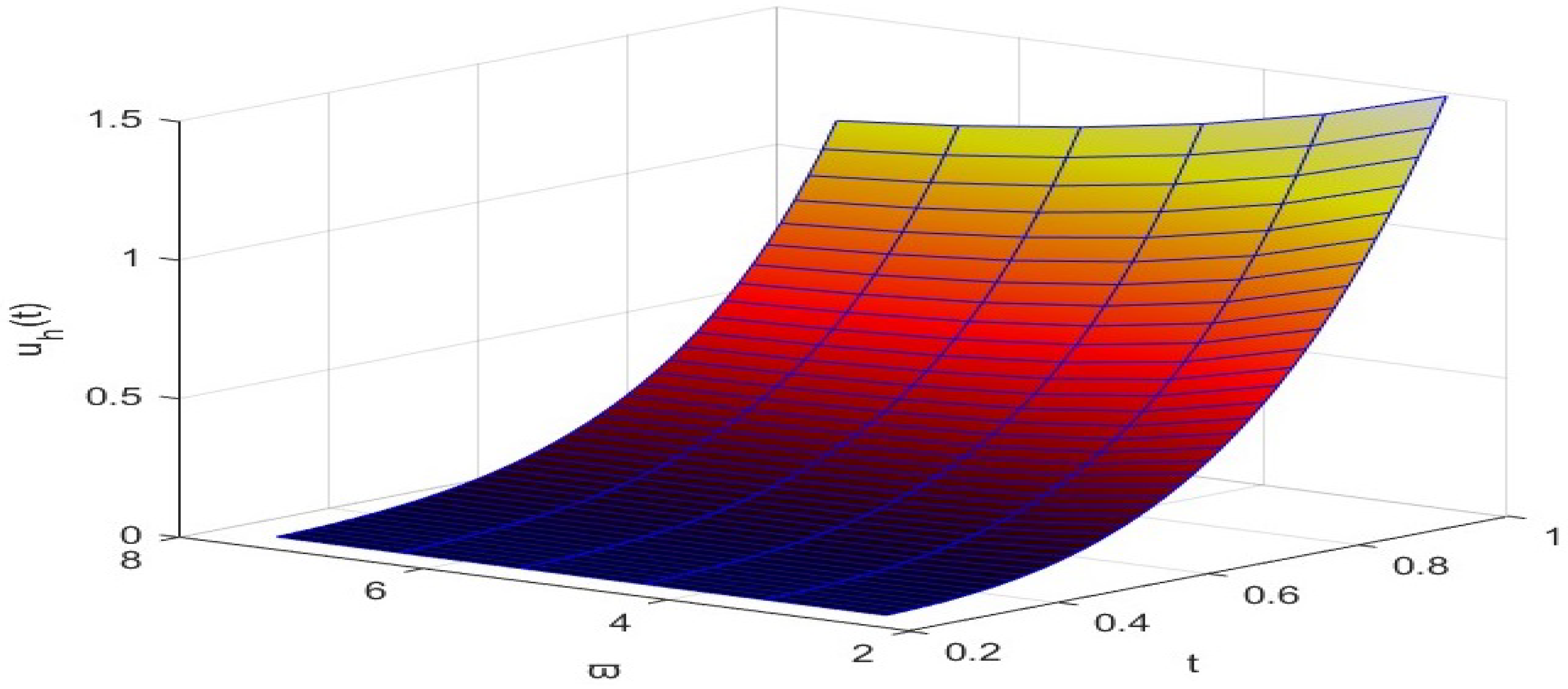
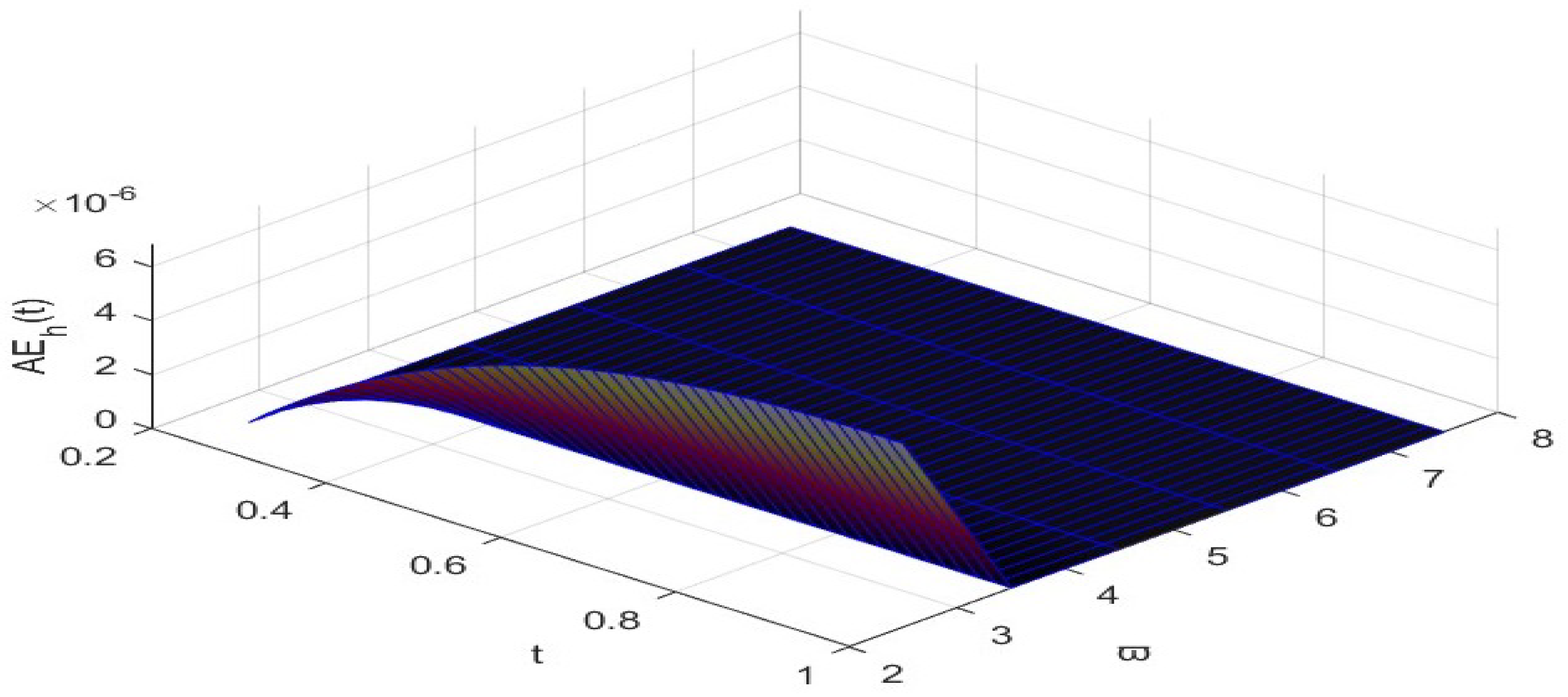
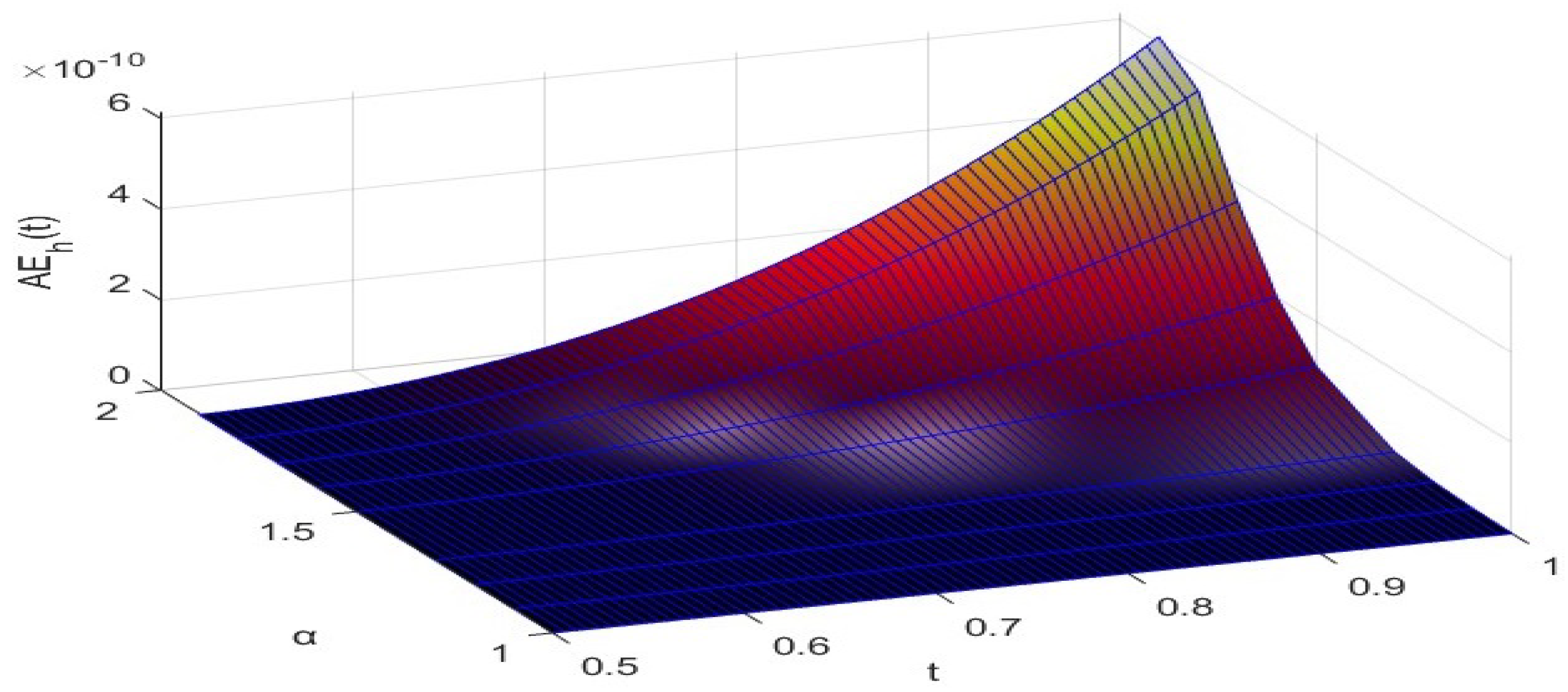
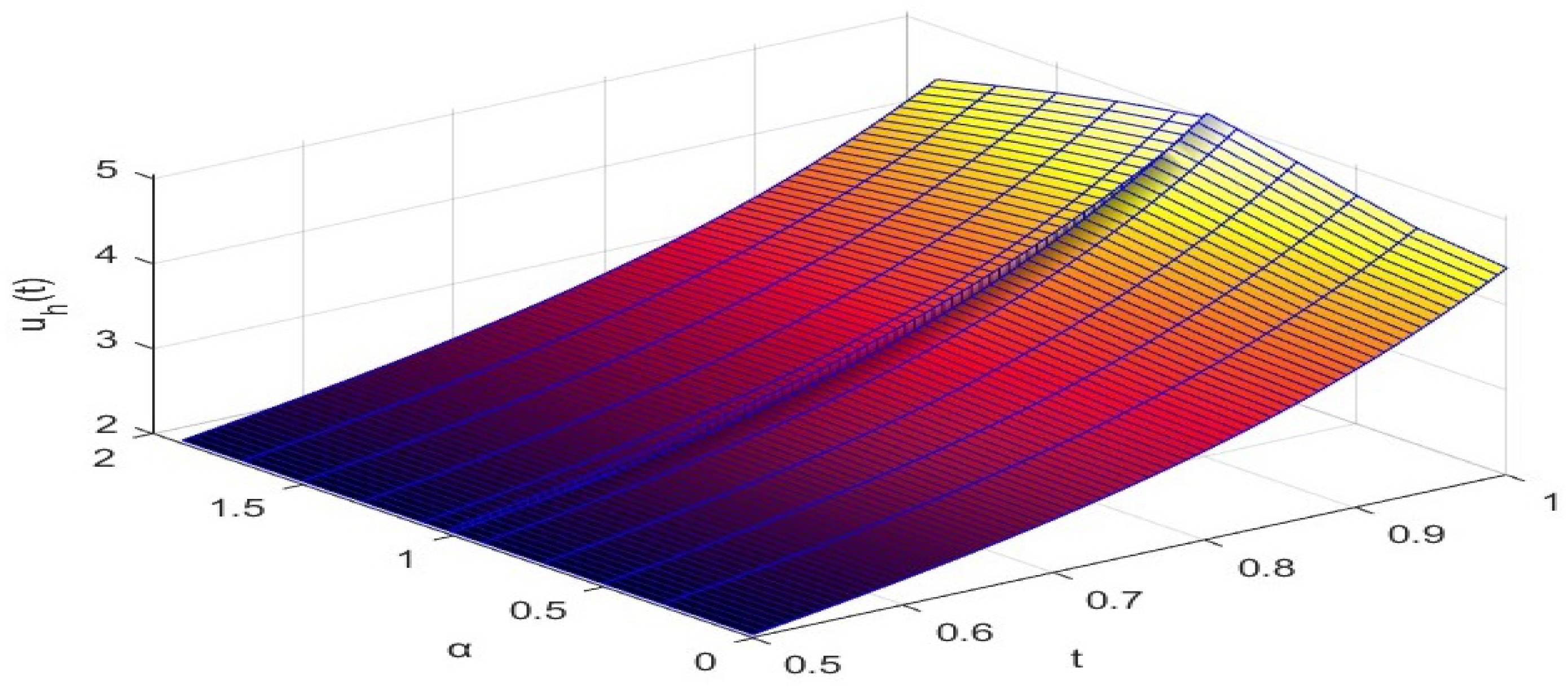
Figure 3 gives the graph of the approximate solution depending on , while Figure 4 presents the graph of with respect to , both by using the G-LP and for Example 1. We see from Figure 2 and Figure 4 that the is higher when the regularity parameter is taken as 5/2 and 7/2.
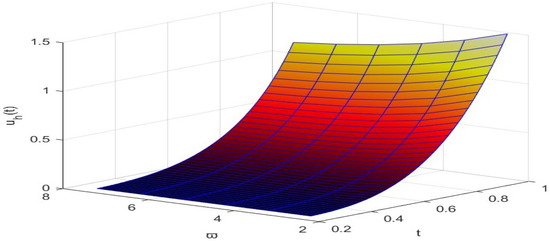
Figure 3.
The graph of approximate solution for Example 1 when with respect to using the G-LP.
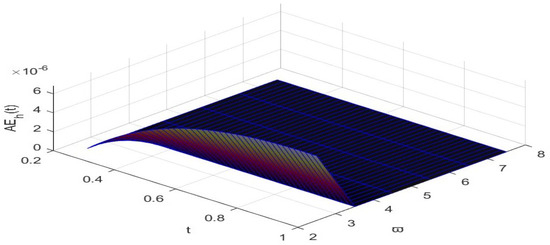
Figure 4.
The graph of the for Example 1 when depending on using the G-LP.
Example 2.
This is an example where the fractional order α is not fixed, i.e., , and the exact solution y is smooth:
is subject to
where the exact solution and the non-homogeneous term are
In this example, the proposed Algorithm 1 is also applied for . Table 3 gives the , , and the ratios , and the determinant of matrix for various values of N and when M-CP is used. A close look at the ratios indicates that the numerical method gives third-order convergence , remarking that and . The analogous quantities are presented in Table 4 for G-LP.
Table 3.
The error norms, convergence orders, and for Example 2 obtained by using the M-CP.
Table 4.
The error norms, convergence orders, and for Example 2 obtained using G-LP.
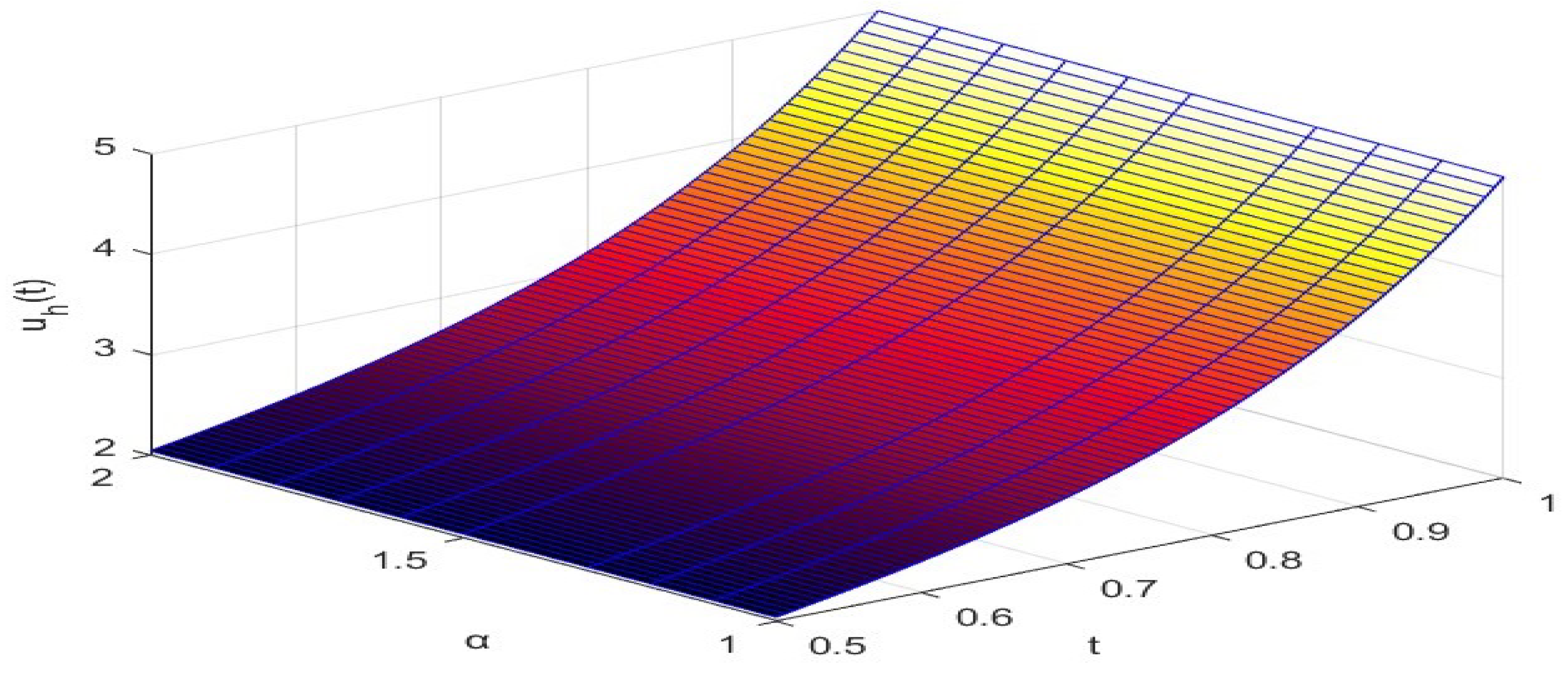
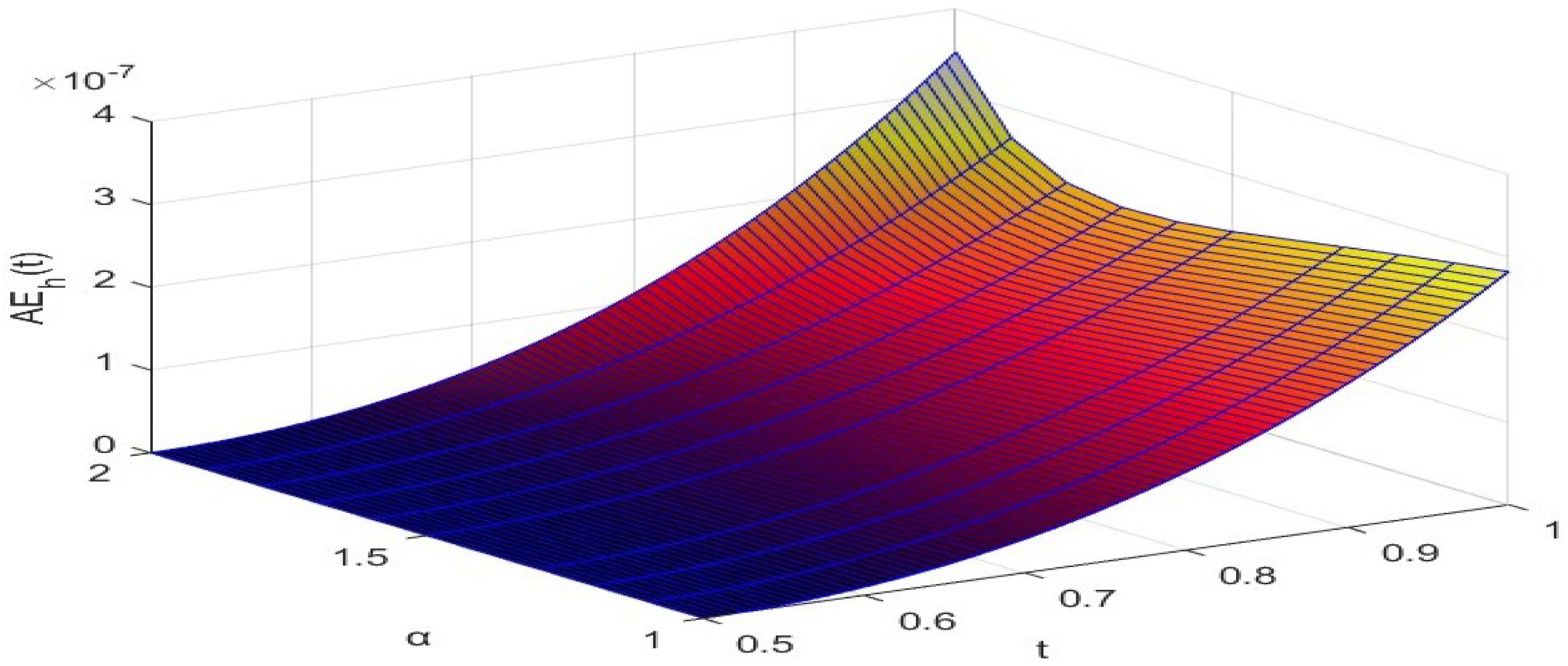
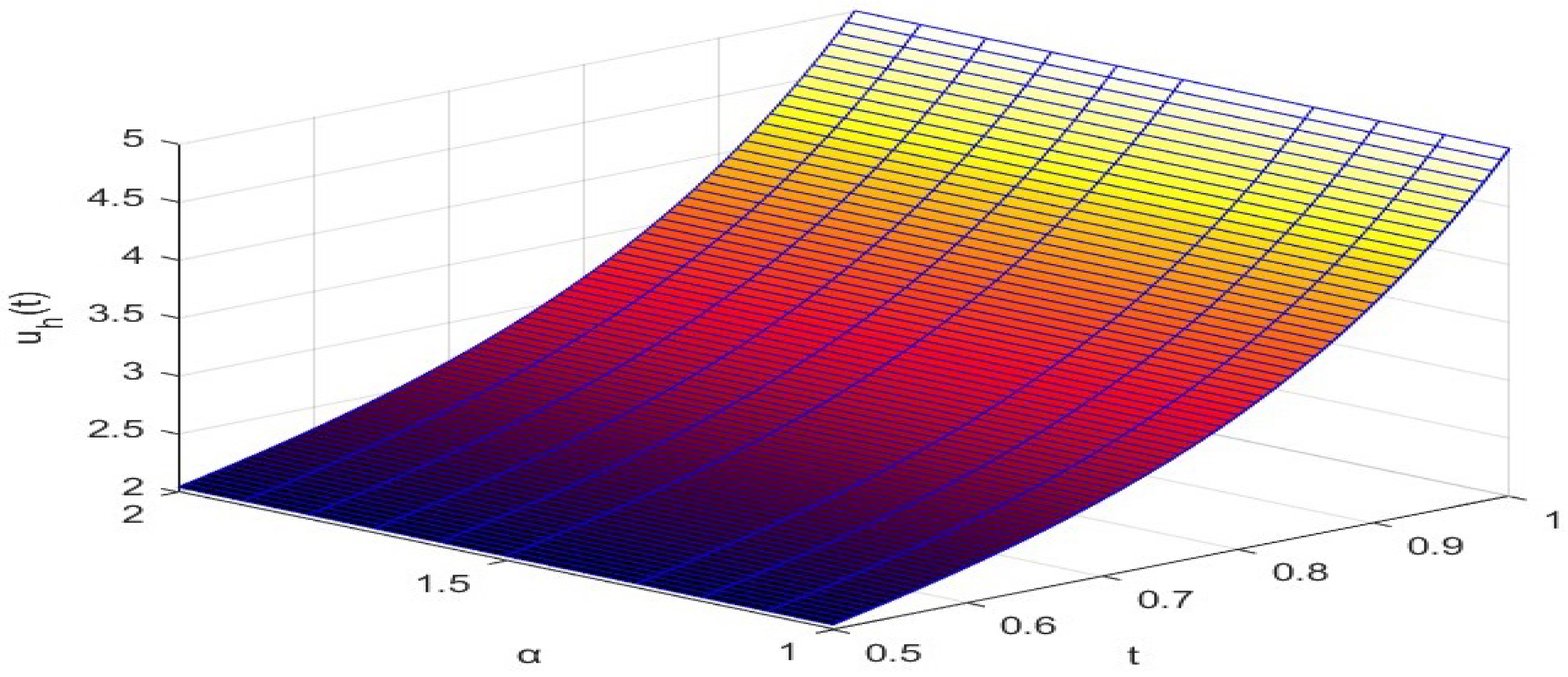
Figure 5 shows the graph of the approximate solution , and Figure 6 demonstrates the absolute error both with respect to for Example 2 when using the M-CP. Further, the functions and with respect to for the same parameters are shown in Figure 7 and Figure 8, respectively, using the G-LP. We view from Figure 6 and Figure 8 that the absolute error is higher near the corner . These figures justify a good approximation of the exact solution.
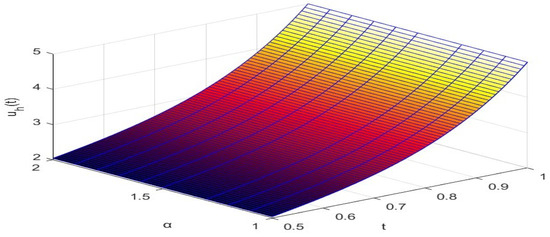
Figure 5.
The graph of the approximate solution for with respect to using the M-CP for Example 2.
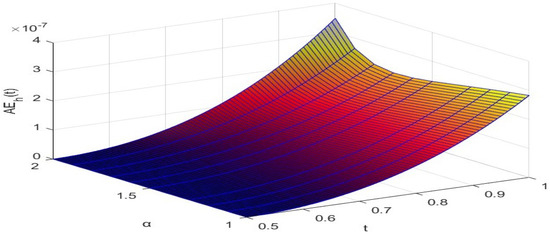
Figure 6.
The graph of the for with respect to using the M-CP for Example 2.
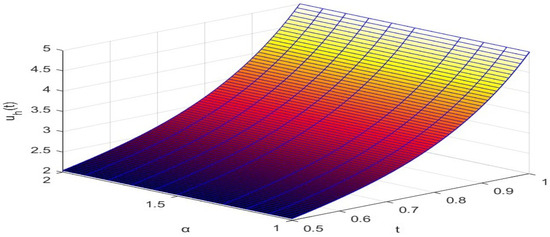
Figure 7.
The graph of the approximate solution for with respect to using the G-LP for Example 2.
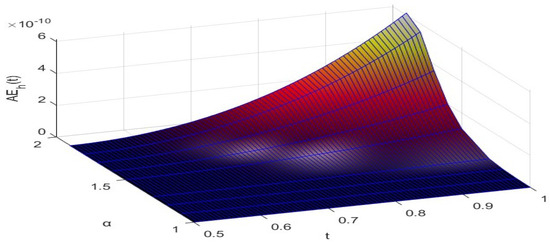
Figure 8.
The graph of the with respect to when using the G-LP for Example 2.
Example 3.
This is an example in which the exact solution is unknown. Consider the following problem:
where , and the exact solution y is unknown, and
The problem in Example 3 reduces to the classical Cauchy–Euler problem for with the exact solution . Table 5 shows the approximate solution of the problem in Example 3 at some mesh points obtained by using the G-LP when , for and . Table 5 also presents the exact solution when . Further, Table 6 gives the approximate solution , for and the convergence order when and for Example 3 for by using G-LP for collocation. In Table 6, na means the order is not available at that point since the error is 0. Additionally, Table 7 presents the total computational time required for applying the algorithm for Example 3 when G-LP and M-CP points are used as collocation parameters. It can be concluded from this table that the total computational time varies linearly with respect to N. Finally, Figure 9 illustrates the graph of the approximate solution for , for Example 3 using the G-LP for collocation.
Table 5.
The approximate solution obtained by using the G-LP when , and , and the exact solution when for Example 3.
Table 6.
The approximate solution , for obtained by using the G-LP when , and , and the exact solution when for Example 3.
Table 7.
The total computational time (CPU(s)) with respect to N obtained when G-LP and M-CP are used.
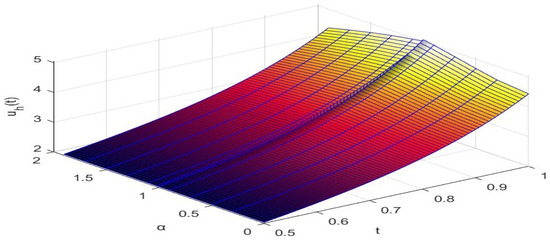
Figure 9.
The graph of the approximate solution for and for Example 3 using the G-LP for collocation.
6. Conclusions
A fractional Cauchy–Euler problem in the Caputo sense is studied. The existence and uniqueness of the solution are investigated using the contracting mapping principle. Further, a collocation method and an algorithm is given for the numerical solution. Additionally, convergence analyses are provided, and the developed method is applied on some constructed fractional Cauchy–Euler (FrC-E) problems. The simulations justify the theoretical results.
In future research, the authors may consider discussing the potential extension of their method, specifically the application of the proposed numerical approach to higher-dimensional Caputo fractional Cauchy–Euler problems. This could be advantageous for addressing more complex systems. The authors can also conduct an error analysis to pinpoint possible sources of numerical inaccuracies and enhance the algorithm for improved precision and stability.
Moreover, they will consider the effectiveness of their method using different types of fractional derivatives operators, such as the Riemanns–Liouville or Grunwald–Letnikov derivatives.
Author Contributions
Conceptualization, N.I.M. and S.C.B.; methodology, N.I.M. and S.C.B.; software, M.J.C.; validation, N.I.M., S.C.B. and M.J.C.; formal analysis, N.I.M., S.C.B. and M.J.C.; investigation, N.I.M., S.C.B. and M.J.C.; writing—original draft preparation, N.I.M., S.C.B. and M.J.C.; writing—review and editing, N.I.M., S.C.B. and M.J.C.; visualization, N.I.M., S.C.B. and M.J.C.; supervision, N.I.M. and S.C.B.; project administration, N.I.M. and S.C.B.; All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by Eastern Mediterranean University under Type-C (BAP-C) scientific research project (Project No BABC-04-23-01).
Informed Consent Statement
Not applicable.
Data Availability Statement
No data is used.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Touma, R.; Zeidan, D. An unstaggered central finite volume method for the numerical approximation of mixture flows. In Proceedings of the International Conference of Numerical Analysis and Applied Mathematics (ICNAAM), Rhodes, Greece, 23–28 September 2019. [Google Scholar]
- Bahia, G.; Ouannas, A.; Batiha, I.M.; Odibat, Z. The optimal homotopy analysis method applied on nonlinear time-fractional hyperbolic partial differential equations. Numer. Methods Partial. Differ. Equ. 2021, 37, 2008–2022. [Google Scholar] [CrossRef]
- Torvik, P.J.; Bagley, R.L. On the appearance of the fractional derivative in the behavior of real materials. J. Appl. Mech. 1984, 51, 294–298. [Google Scholar] [CrossRef]
- Wei, H.M.; Zhong, X.C.; Huang, Q.A. Uniqueness and approximation of solution for fractional Bagley–Torvik equations with variable coefficients. Int. J. Comput. Math. 2017, 94, 1542–1561. [Google Scholar] [CrossRef]
- Zhong, X.; Liu, X.; Liao, S. On a generalized Bagley–Torvik equation with a fractional integral boundary condition. Int. J. Appl. Comput. 2017, 3, 727–746. [Google Scholar] [CrossRef]
- Irmak, H. Some computational results for functions belonging to a family consisting of Cauchy-Euler type differential equation. Fract. Differ. Calc. 2012, 2, 109–117. [Google Scholar] [CrossRef]
- Mazur, D.; Marek, K. Analysis and Simulation of Electrical and Computer Systems; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Kilbas, A.A.; Rivero, M.; Trujillo, J.J. Euler-Type Fractional Differential Equations. In Proceedings of the 5th International ISAAC Congress, Catania, Italy, 25–30 July 2005. [Google Scholar]
- Debnath, L.; Bhatta, D. Integral Transforms and Their Applications; Chapman and Hall/CRC: New York, NY, USA, 2016. [Google Scholar]
- Zhukovskaya, N.V.; Kilbas, A.A. Solving homogeneous fractional differential equations of Euler type. Differ. Equ. 2011, 47, 1714–1725. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Zhukovskaya, N.V. Euler-type non-homogeneous differential equations with three Liouville fractional derivatives. Fract. Calc. Appl. Anal. 2009, 12, 206–234. [Google Scholar]
- Erdélyi, A.; Magnus, W.; Oberhettinger, F.; Tricomi, F.G. Table Errata: Higher Transcendental Functions, Volume I, II; McGraw-Hill: New York, NY, USA, 1953. [Google Scholar]
- Zhukovskaya, N.V. Solutions of Euler-type homogeneous differential equations with finite number of fractional derivatives. Integral Transform. Spec. Funct. 2012, 23, 161–175. [Google Scholar] [CrossRef]
- Simmons, G.F. Differential Equations with Applications and Historical Notes; CRC Press: New York, NY, USA, 2016. [Google Scholar]
- Granas, A.; Guenther, R.B.; Lee, J.W. Nonlinear boundary value problems for ordinary differential equations. Diss. Math. (Rozpr. Mat.) 1985, 244, 128. [Google Scholar]
- O’Regan, D. Existence of positive solutions to some singular and nonsingular second order boundary value problems. J. Differ. Equ. 1990, 84, 228–251. [Google Scholar] [CrossRef]
- Young, N.F.; Tisdell, C.C. The existence of solutions to second-order singular boundary value problems. Nonlinear Anal. 2012, 75, 4798–4806. [Google Scholar] [CrossRef]
- Tisdell, C.C. Basic existence and a priori bound results for solutions to systems of boundary value problems for fractional differential equations. Electron. J. Differ. Equ. 2016, 2016, 1–9. [Google Scholar]
- Young, N.F. Existence results, inequalities and a priori bounds to fractional boundary value problems. Fract. Differ. Calc. 2021, 11, 175–191. [Google Scholar]
- Turqa, S.M.; Nuruddeen, R.I.; Nawaz, R. Recent advances in employing the Laplace homotopy analysis method to nonlinear fractional models for evolution equations and heat-typed problems. Int. J. Thermofluids 2024, 22, 100681. [Google Scholar] [CrossRef]
- Brunner, H. Collocation Methods for Volterra Integral and Related Functional Differential Equations; Cambridge University Press: London, UK, 2004; pp. 1–17. [Google Scholar]
- Al-Mdallal, Q.M.; Syam, M.I.; Anwar, M.N. A collocation-shooting method for solving fractional boundary value problems. Appl. Math. Comput. 2010, 15, 3814–3822. [Google Scholar] [CrossRef]
- Conte, D.; D’Ambrosio, R.; D’Arienzo, M.P.; Paternoster, B. Semi-implicit multivalue almost collocation methods. In Proceedings of the International Conference of Numerical Analysis and Applied Mathematics (ICNAAM), Rhodes, Greece, 17–23 September 2020. [Google Scholar]
- Zhang, X.; Du, H. An improved collocation method for solving a fractional integro-differential equation. Comput. Appl. Math. 2021, 40, 1–14. [Google Scholar] [CrossRef]
- Baleanu, D.; Shiri, B. Collocation methods for fractional differential equations involving non-singular kernel. Chaos Solitons Fractals 2018, 116, 136–145. [Google Scholar] [CrossRef]
- Eslahchi, M.; Dehghan, M.; Parvizi, M. Application of the collocation method for solving nonlinear fractional integro-differential equations. J. Comput. Appl. Math. 2014, 257, 105–128. [Google Scholar] [CrossRef]
- Rahimkhani, P.; Ordokhani, Y.; Lima, P.M. An improved composite collocation method for distributed-order fractional differential equations based on fractional Chelyshkov wavelets. Appl. Numer. Math. 2019, 145, 1–27. [Google Scholar] [CrossRef]
- Al-Mdallal, Q.M.; Omer, A.S. Fractional-order Legendre-collocation method for solving fractional initial value problems. Appl. Math. Comput. 2018, 321, 74–84. [Google Scholar] [CrossRef]
- Mirzaee, F.; Samadyar, N. On the numerical solution of fractional stochastic integro-differential equations via meshless discrete collocation method based on radial basis functions. Eng. Anal. Bound. Elem. 2019, 100, 246–255. [Google Scholar] [CrossRef]
- Mahmudov, I.N.; Buranay, S.C.; Chin, M.J. On a collocation method for the fractional Cauchy-Euler problem. In Proceedings of the International Conference of Numerical Analysis and Applied Mathematics 2023 (ICNAAM 2023), Crete, Greece, 11–16 September 2023. [Google Scholar]
- Rawashdeh, E.A. Numerical solution of semidifferential equations by collocation method. Appl. Math. Comput. 2006, 174, 869–876. [Google Scholar] [CrossRef]
- Buranay, S.C.; Chin, M.J.; Mahmudov, N.I. A collocation-shooting method for solving fractional boundary value problems for generalized Bagley Torvik equation. In Proceedings of the International Conference on Analysis and Applied Mathematics, Antalya, Turkey, 31 October–6 November 2022. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006; pp. 1–523. [Google Scholar]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables; US Government Printing Office: Washington, DC, USA, 1968.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).