
An Efficient Chicken Search Optimization Algorithm for the Optimal Design of Fuzzy Controllers





Abstract
1. Introduction
2. Chicken Search Optimization Algorithm
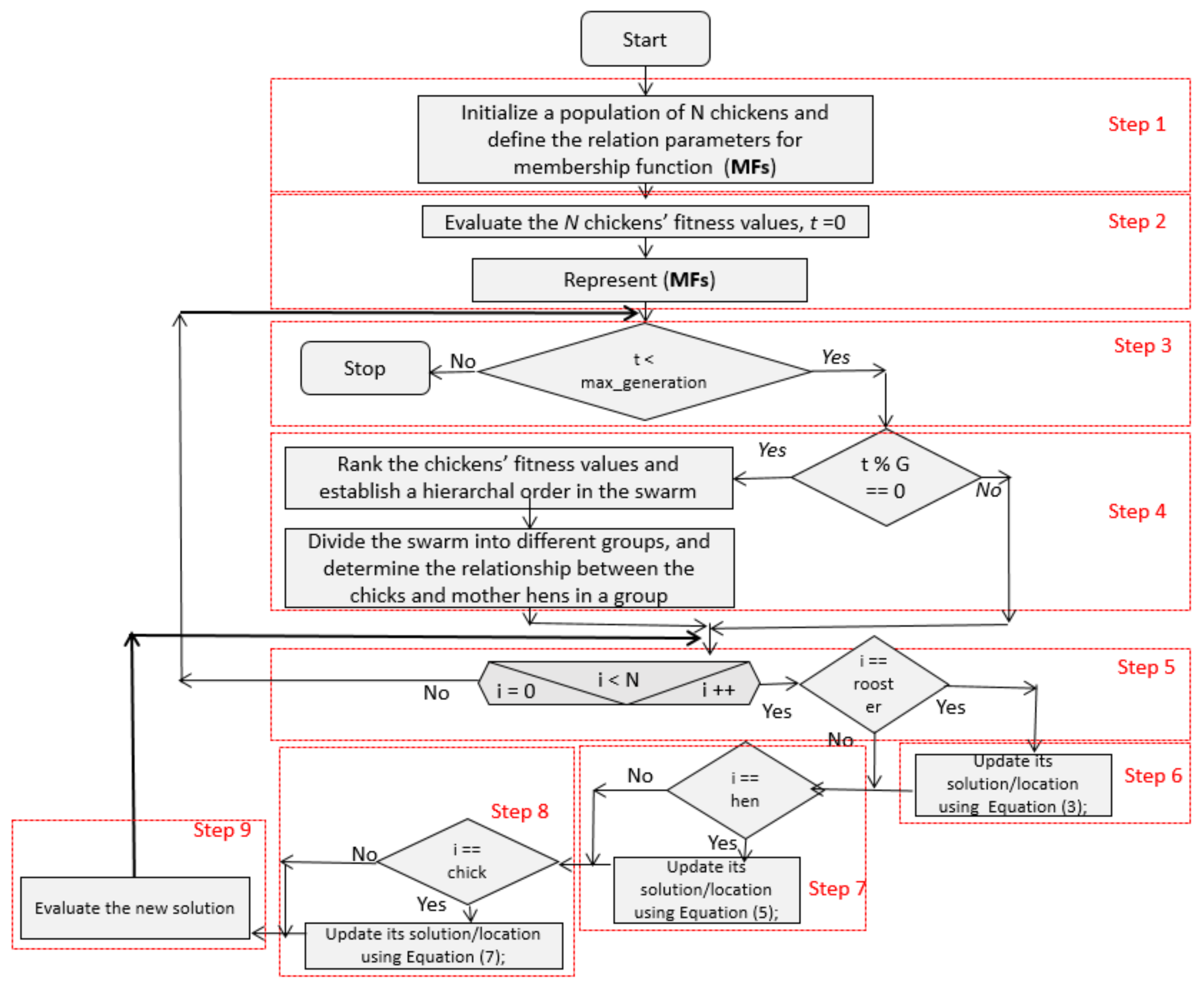
| Algorithm 1 General Steps of the CSO Algorithm |
| 1. Initialize a population of N chickens and define the relation parameters; |
| 2. Evaluate the N chickens’ fitness values, t=0; |
| 3. While (t < Max_Generation) |
| 4. If (t % G = = 0) |
| 5. Rank the chickens’ fitness values and establish a hierarchal order in the swarm; |
| 6. Divide the swarm into different groups, and determine the relationship between the chicks and mother hens in a group; |
| 7. End if; |
| 8. For i = 1; N |
| 9. If (i == rooster) |
| 10. Update its solution/location using Equation (3); |
| 11. End if; |
| 12. If (i == hen) |
| 13. Update its solution/location using Equation (5); |
| 14. End if; |
| 15. If (i == chick) |
| 16. Update its solution/location using Equation (7); |
| 17. End if; |
| 18. Evaluate the new solution; |
| 19. If the new solution is better its previous one; update it; |
| 20. End For; |
| 21. End While; |
3. Control Problems
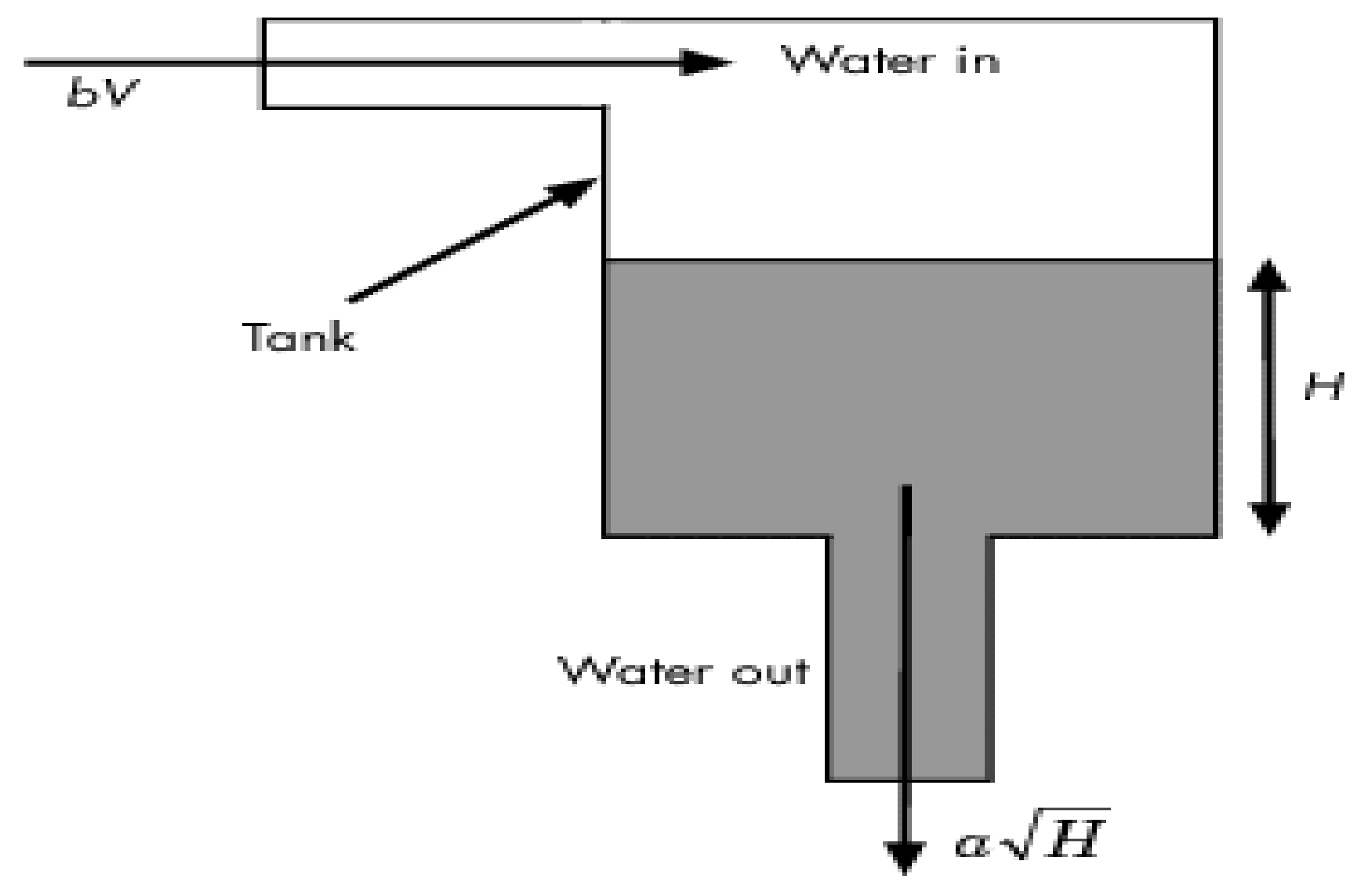
3.1. Water Tank Controller
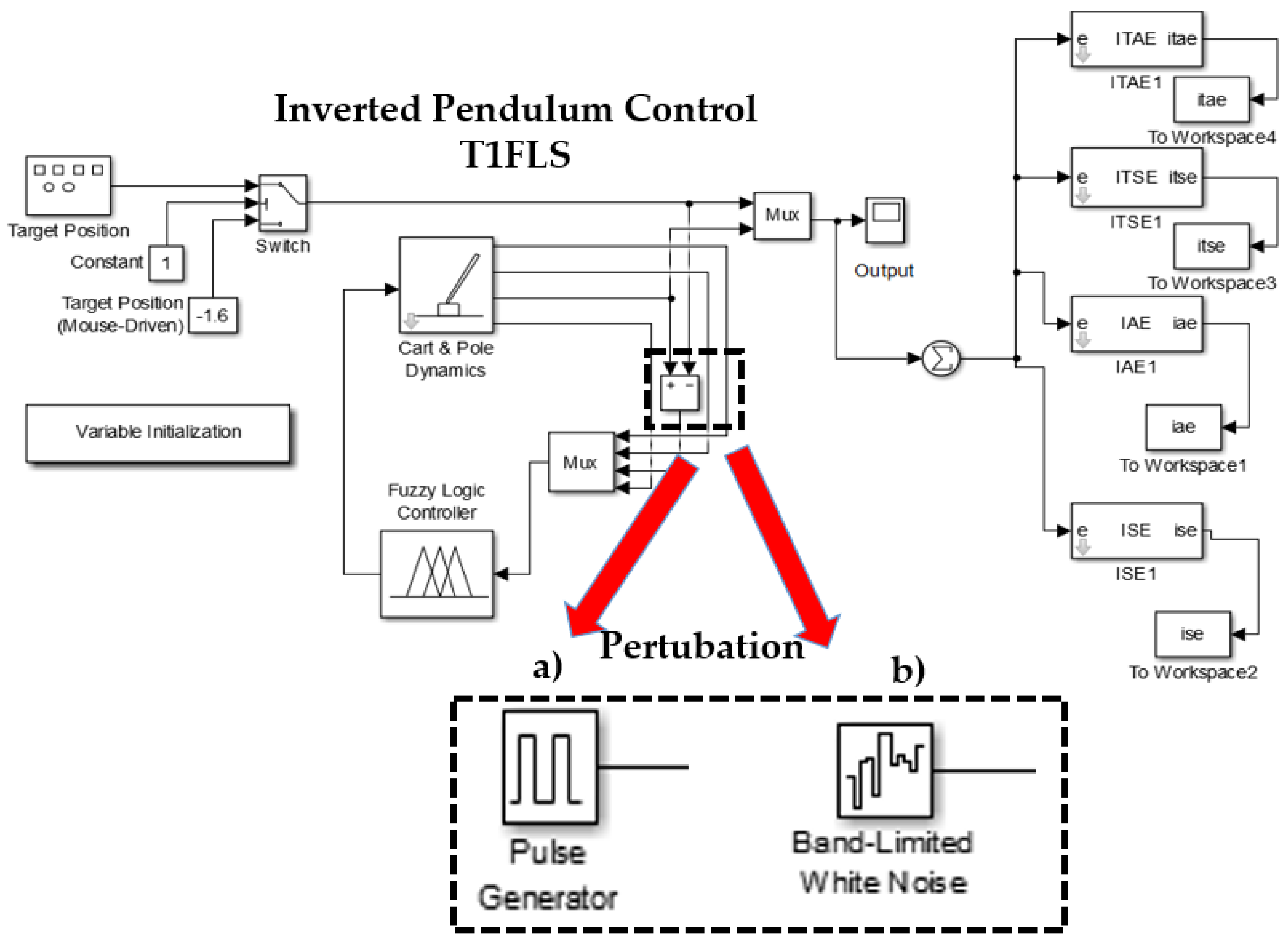
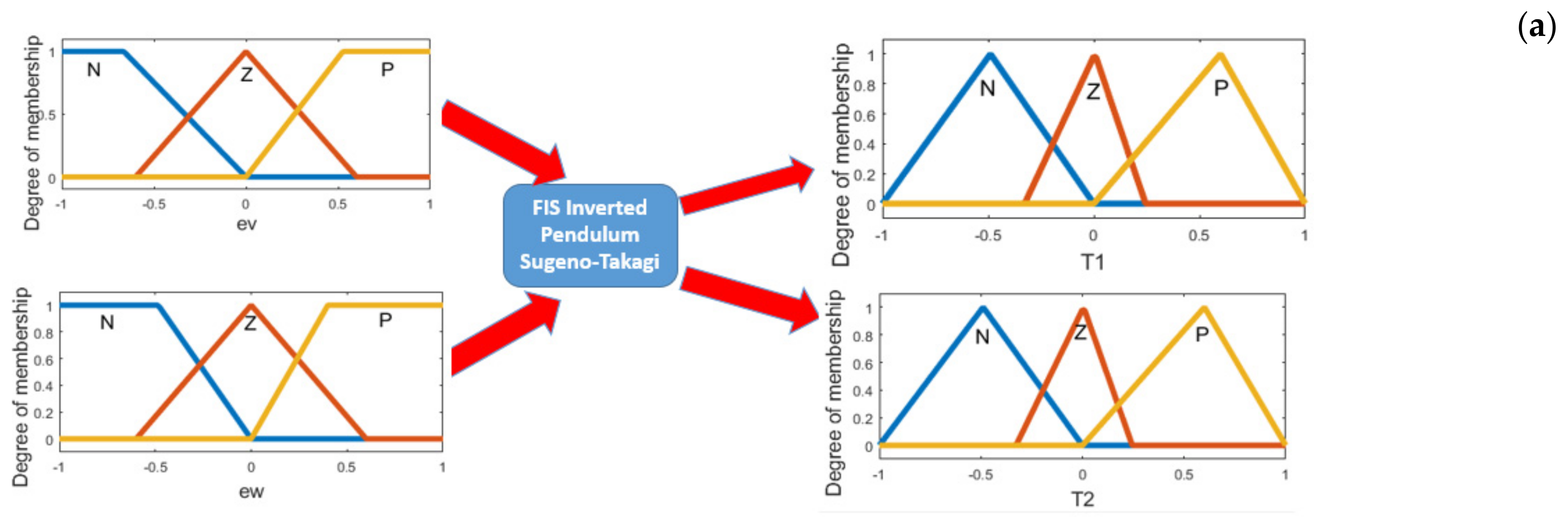
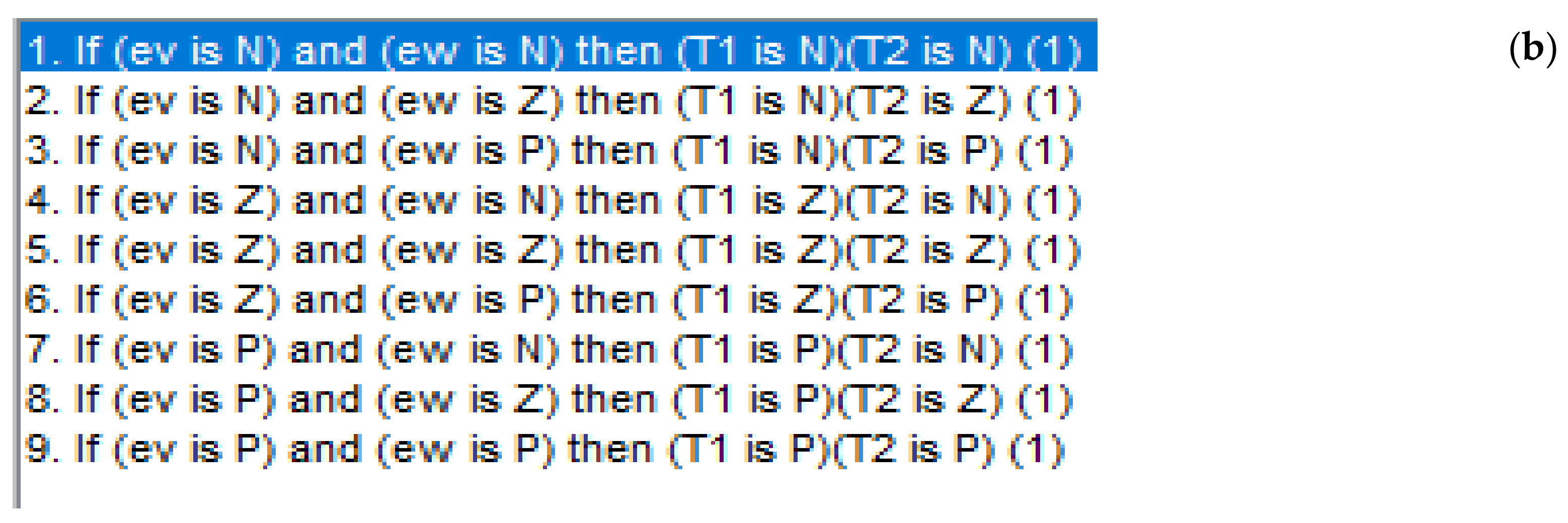
3.2. Inverted Pendulum Controller
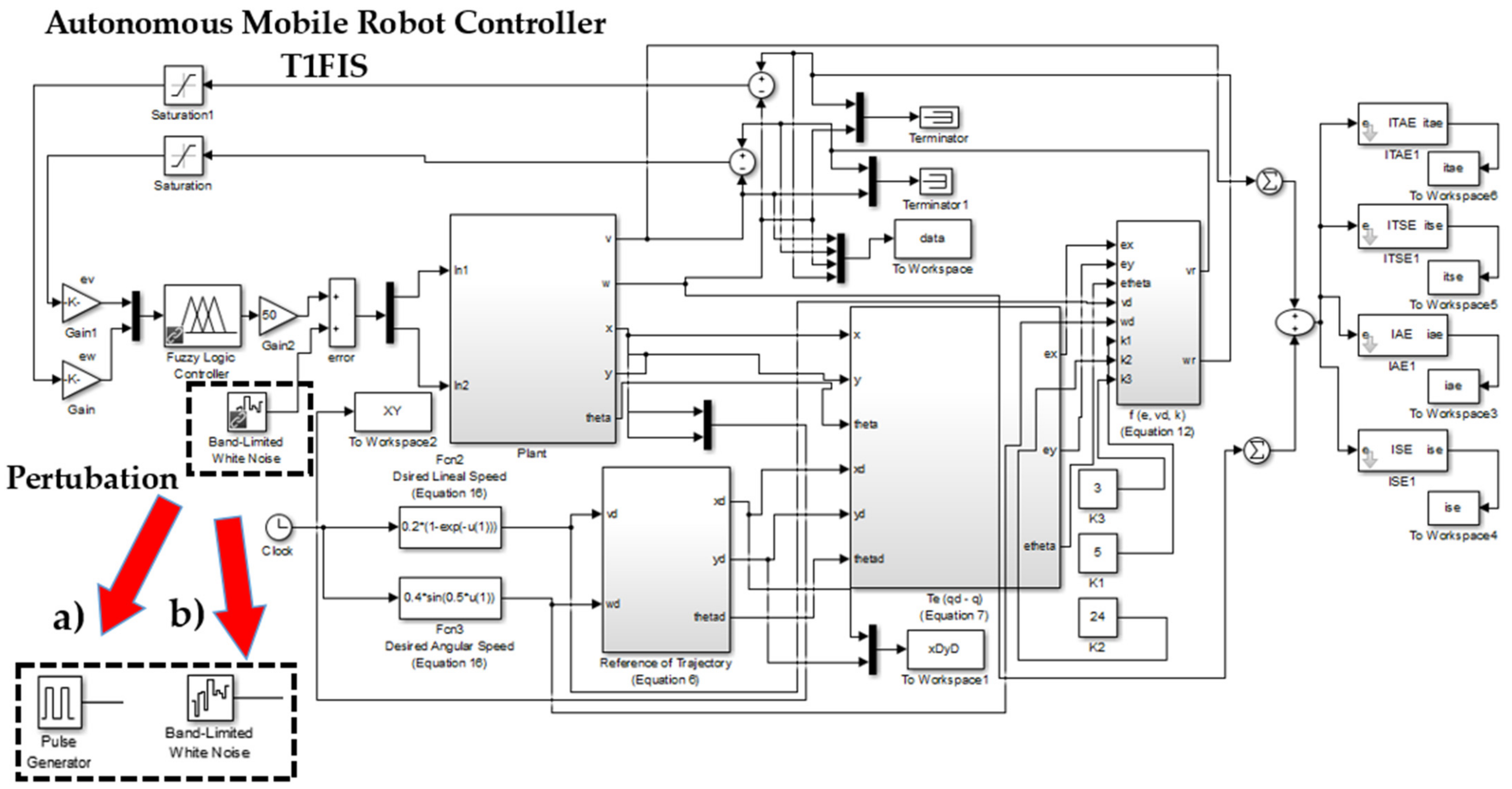
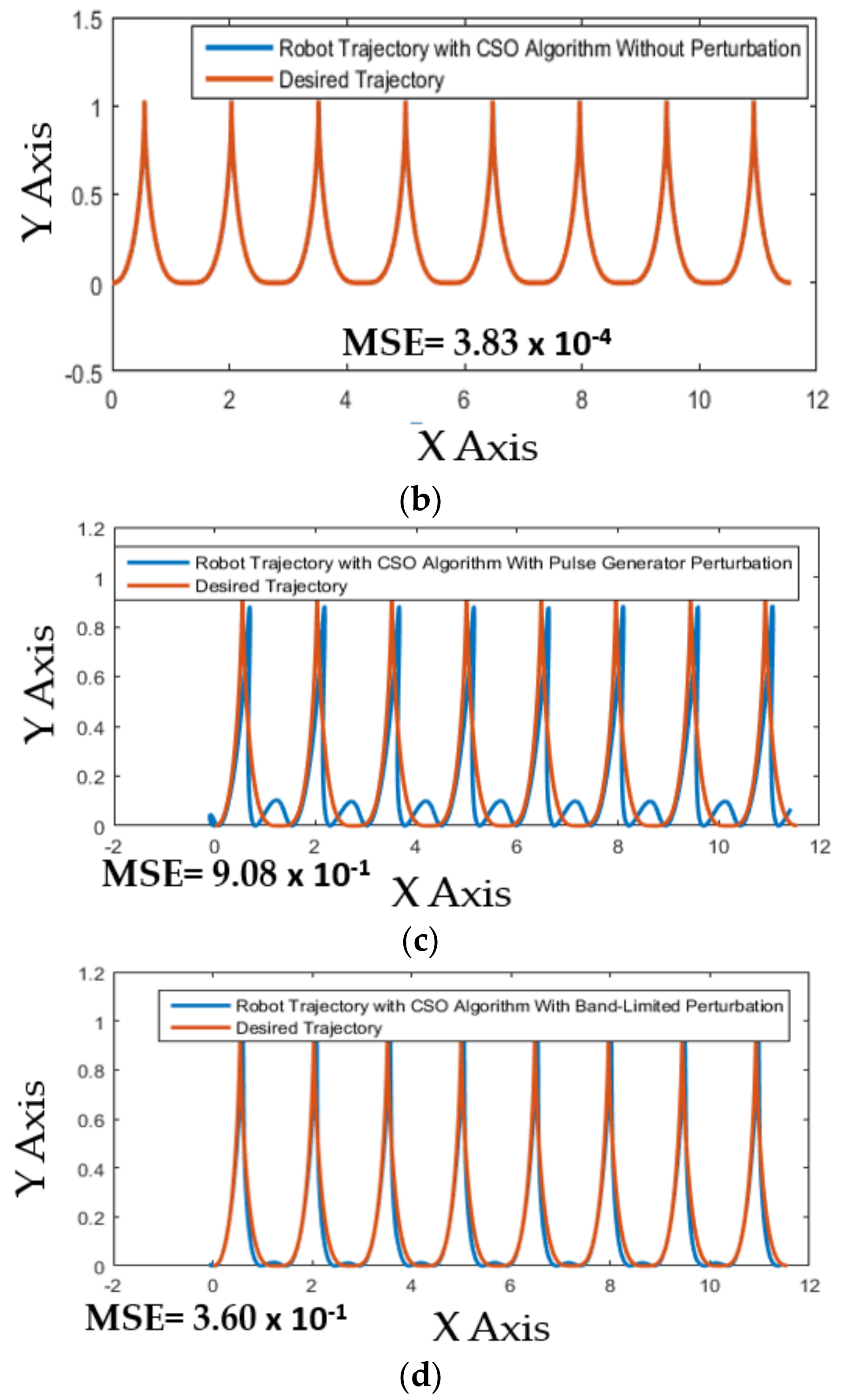
3.3. Autonomous Mobile Robot Controller
- is the vector of the configuration coordinates,
- is the vector of velocities,
- is the vector of torques applied to the wheels of the robot where and denote the torques of the right and left wheel,
- is the uniformly bounded disturbance vector,
- is the positive-definite inertia matrix,
- is the vector of centripetal and Coriolis forces, and
- is a diagonal positive-definite damping matrix.
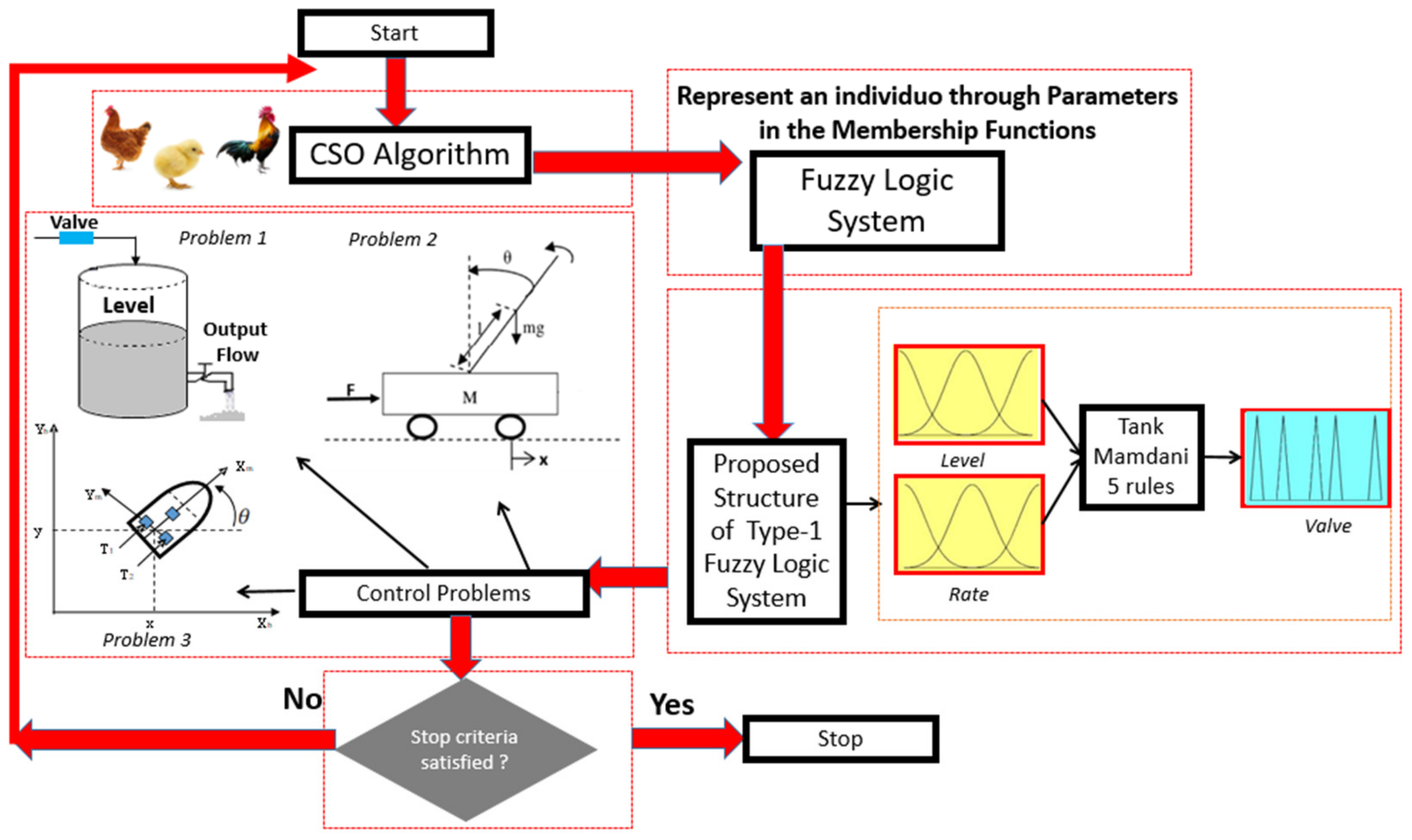
4. Proposed Structure of Type-1 Fuzzy Logic Systems for Control
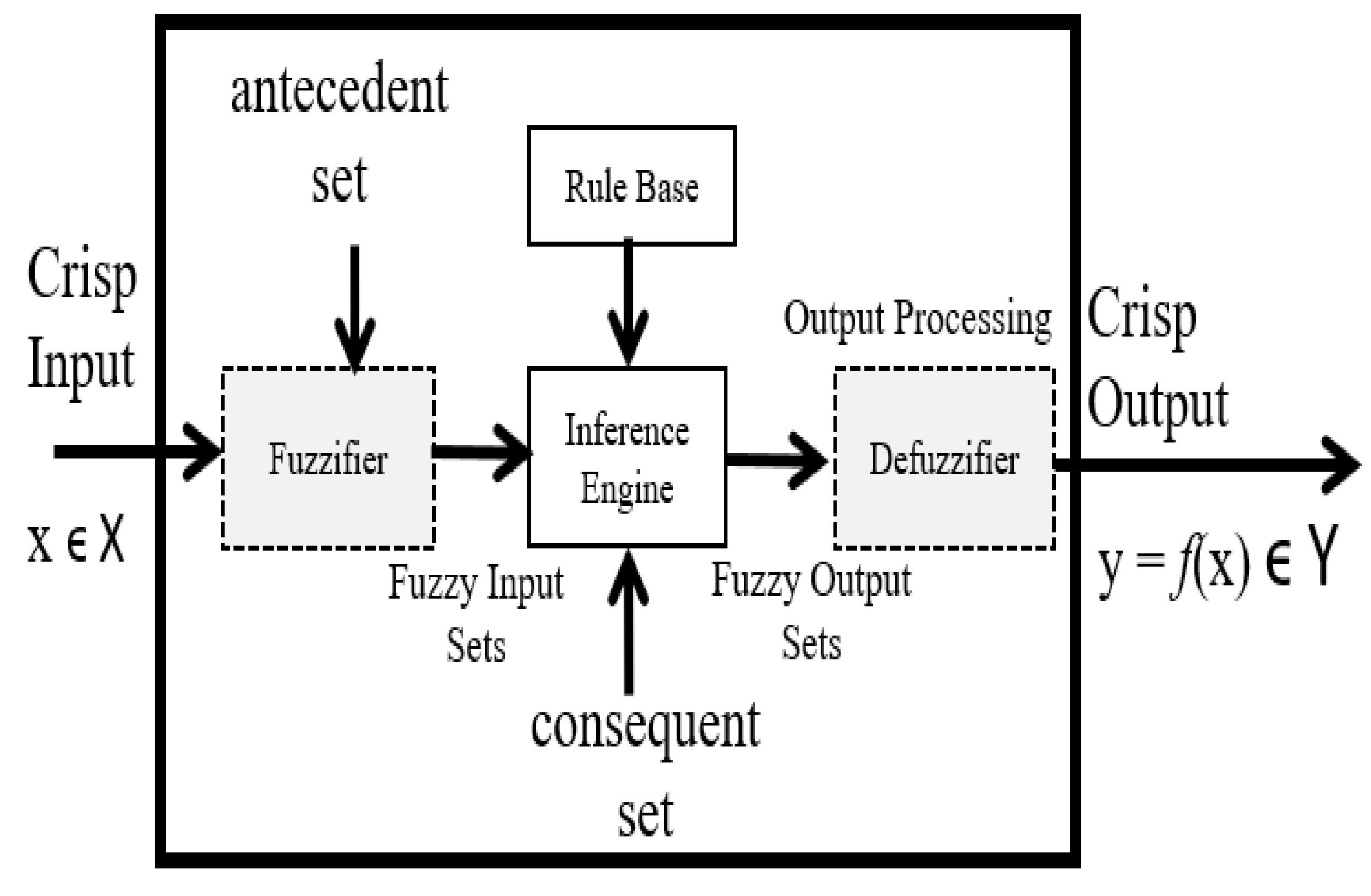
4.1. Fuzzy Logic System
4.2. Fuzzy Logic Controller
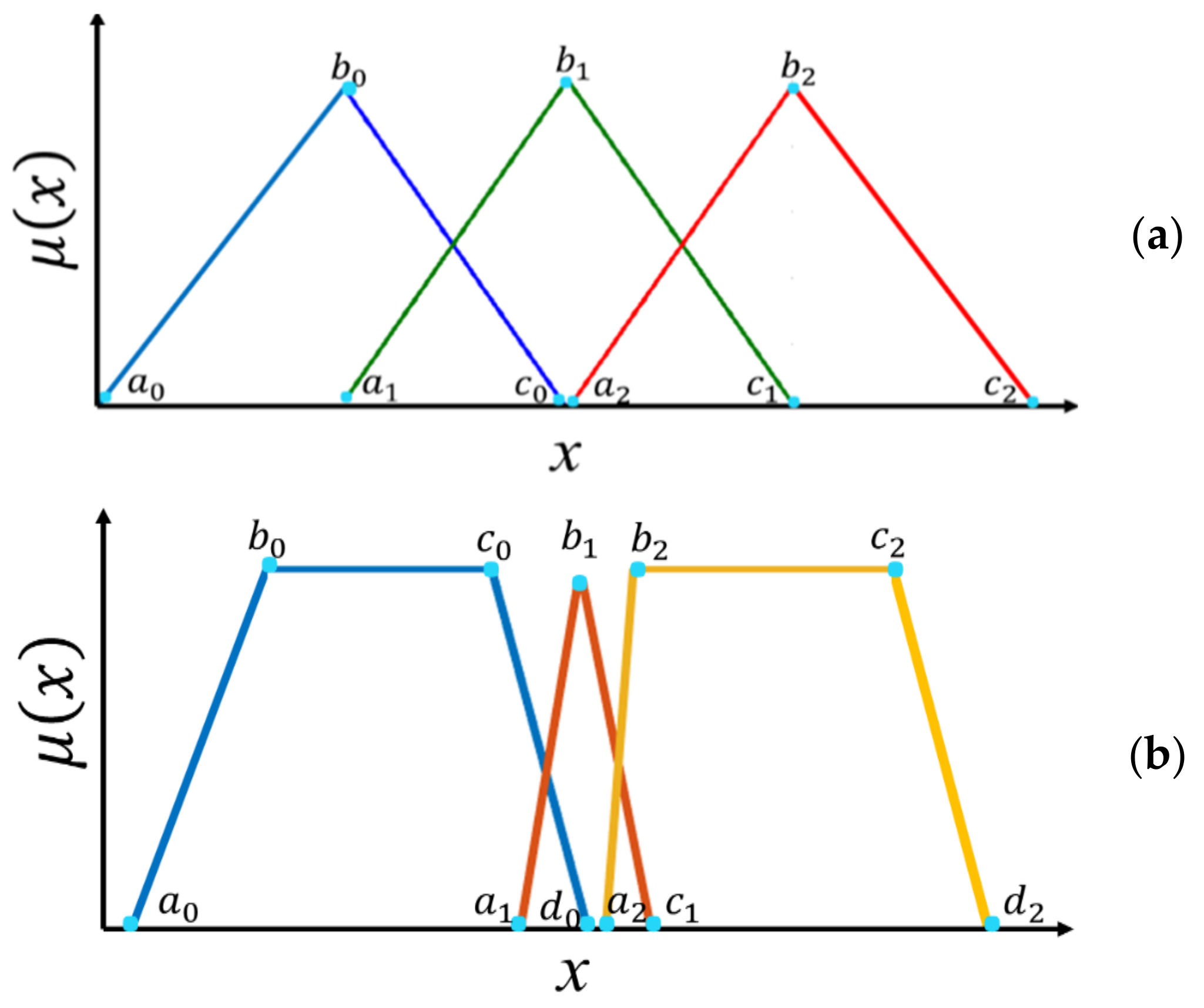
4.3. Proposed Structure of the Type-1 FLS
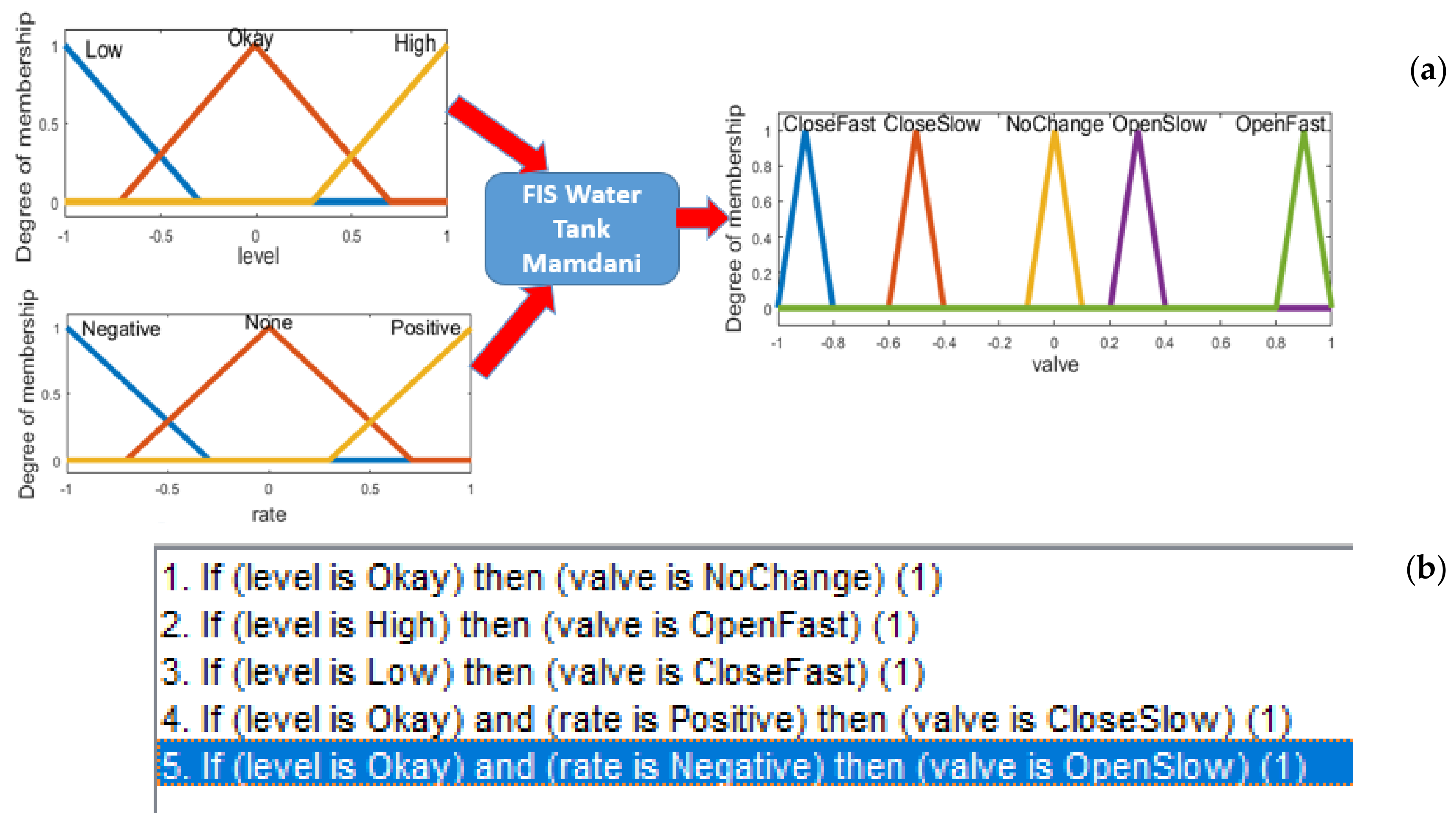
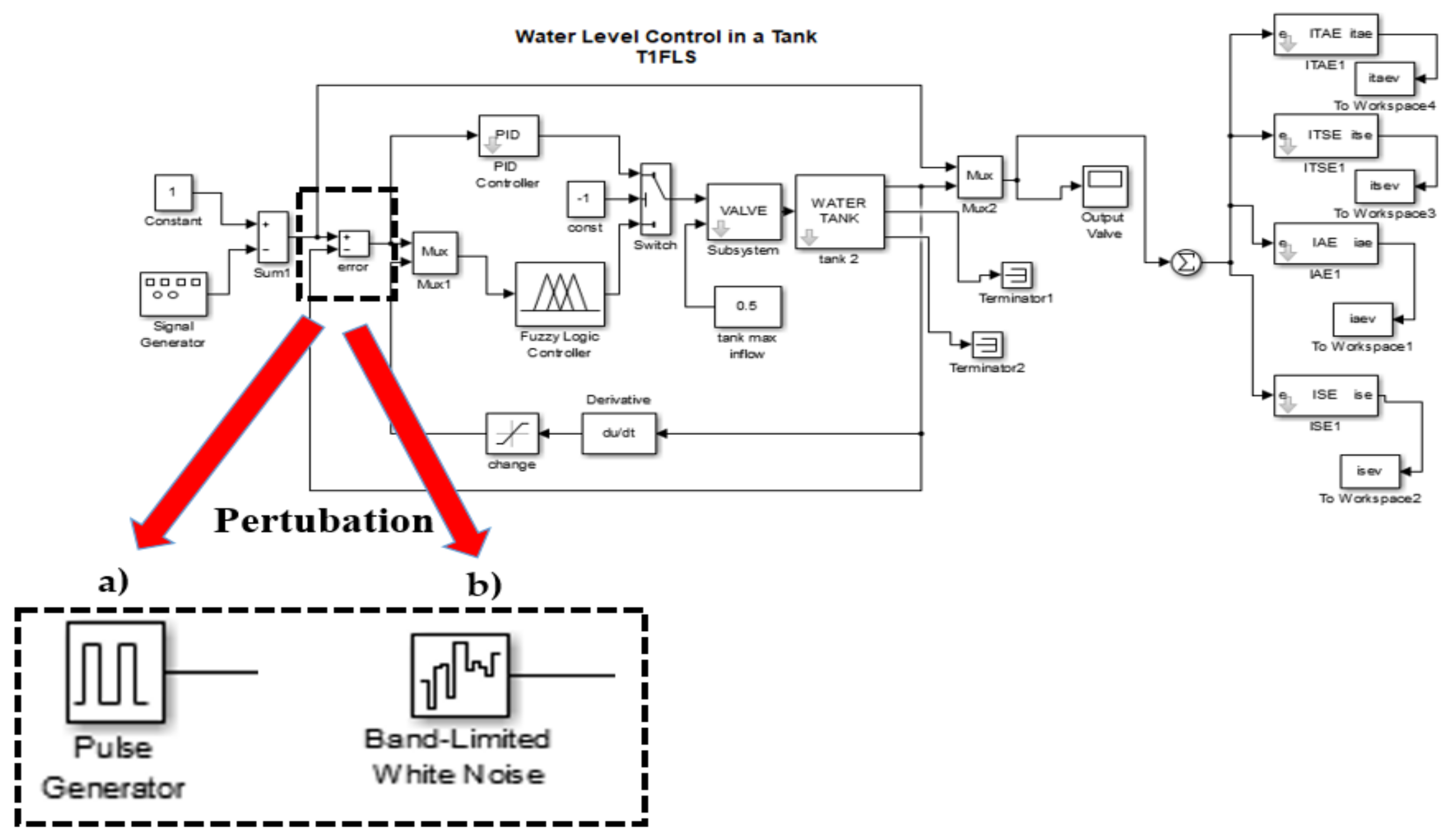
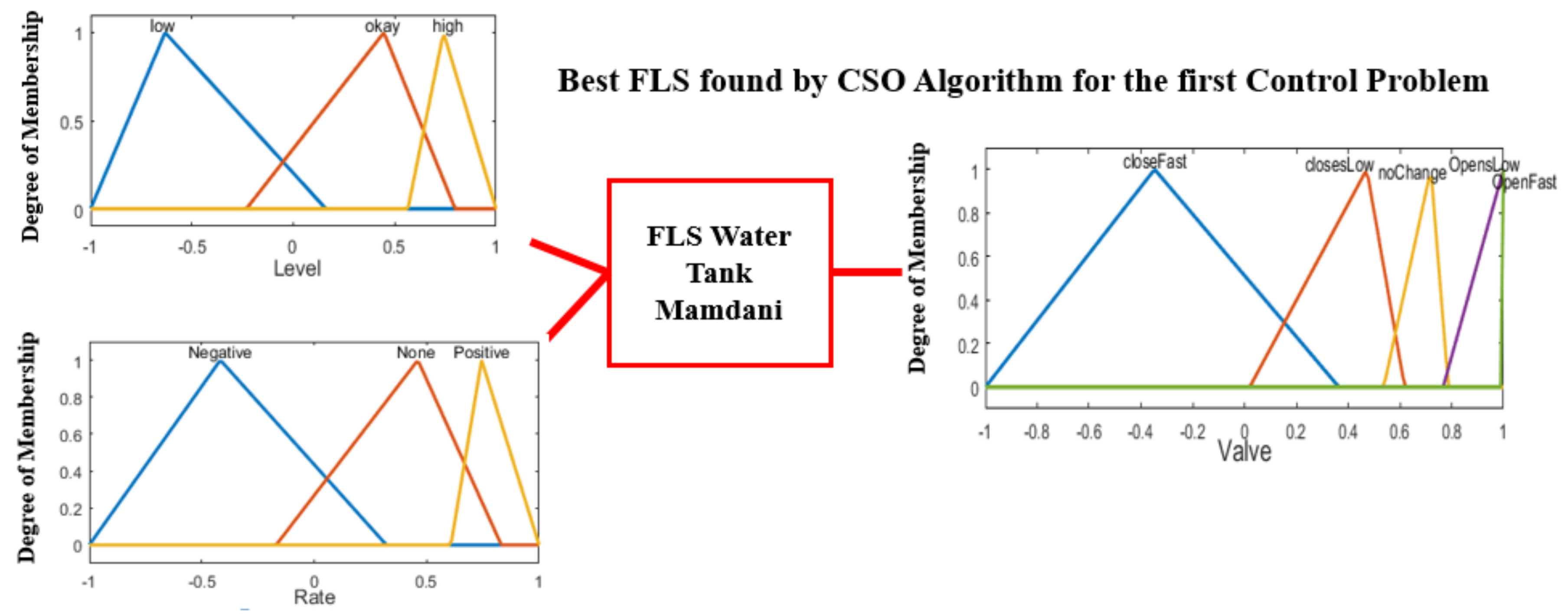
4.3.1. Water Tank Controller
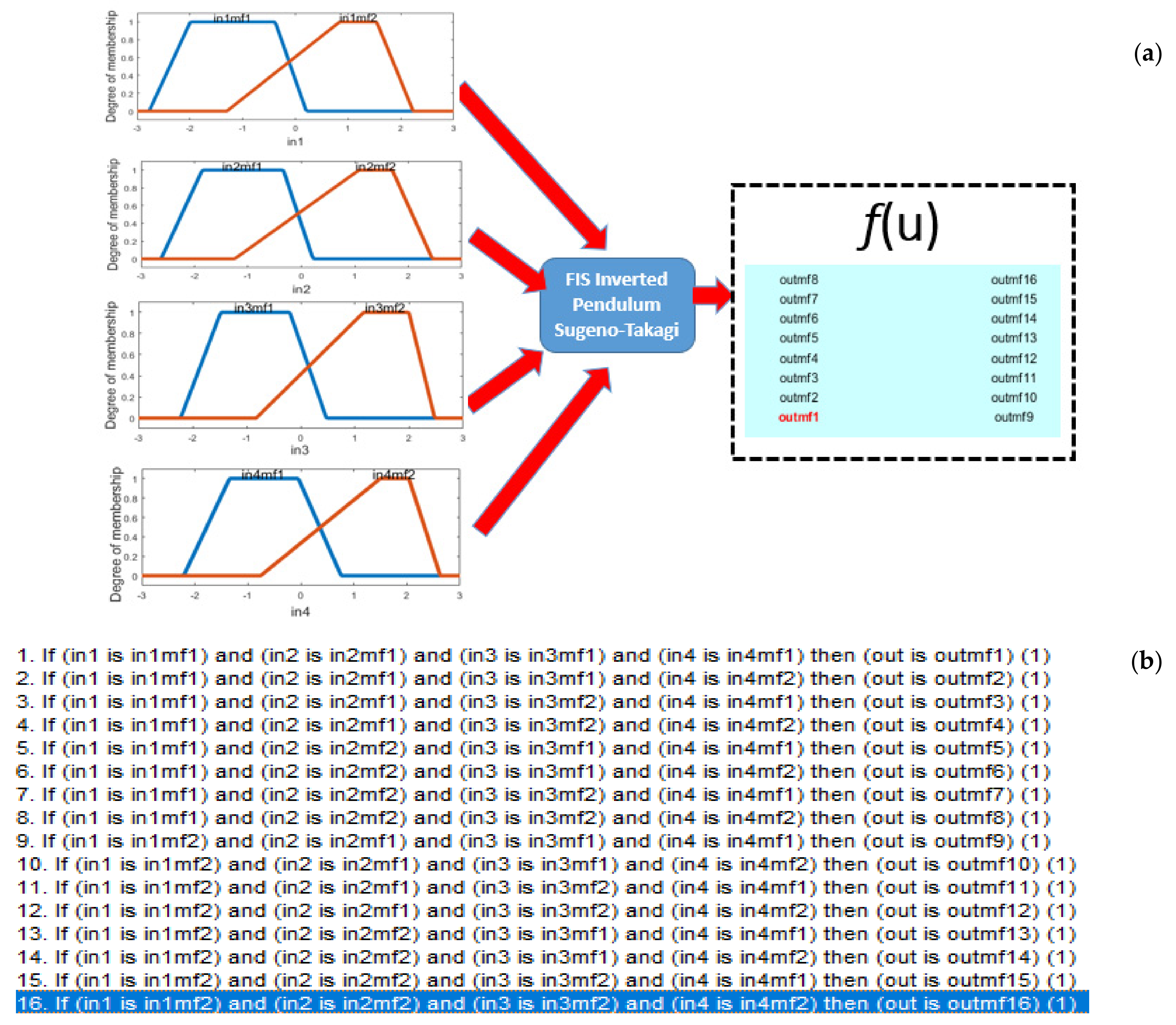
4.3.2. Inverted Pendulum Controller
4.3.3. Autonomous Mobile Robot Controller
5. Simulations Results
6. Comparative Analysis and Discussion of Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shayokh, M.A.; Shin, S.Y. Bio inspired distributed WSN localization based on chicken swarm optimization. Wirel. Personal Commun. 2017, 97, 5691–5706. [Google Scholar] [CrossRef]
- Banerjee, S.; Chattopadhyay, S. Improved serially concatenated convolution turbo code (SCCTC) using chicken swarm optimization. In Proceedings of the 2015 IEEE Power, Communication and Information Technology Conference (PCITC), Bhubaneswar, India, 15–17 October 2015; pp. 268–273. [Google Scholar]
- Chen, Y.L.; He, P.L.; Zhang, Y.H. Combining penalty function with modified chicken swarm optimization for constrained optimization. In Proceedings of the First International Conference on Information Sciences, Machinery, Materials and Energy, Chongqing, China, 11–13 April 2015. [Google Scholar]
- Deb, S.; Tammi, K.; Gao, X.Z.; Kalita, K.; Mahanta, P. A Hybrid Multi-Objective Chicken Swarm Optimization and Teaching Learning Based Algorithm for Charging Station Placement Problem. IEEE Access 2020, 8, 92573–92590. [Google Scholar] [CrossRef]
- Deb, S.; Gao, X.Z.; Tammi, K.; Kalita, K.; Mahanta, P. A New Teaching–Learning-based Chicken Swarm Optimization Algorithm. Soft Comput. 2020, 24, 5313–5331. [Google Scholar] [CrossRef]
- Deb, S.; Gao, X.Z.; Tammi, K.; Kalita, K.; Mahanta, P. Recent studies on chicken swarm optimization algorithm: A review (2014–2018). Artif. Intell. Rev. 2019, 53, 1737–1765. [Google Scholar] [CrossRef]
- Hafez, A.I.; Zawbaa, H.M.; Emary, E.; Mahmoud, H.A.; Hassanien, A.E. An innovative approach for feature selection based on chicken swarm optimization. In Proceedings of the 2015 7th International Conference of Soft Computing and Pattern Recognition (SoCPaR), Fukuoka, Japan, 13–15 November 2015; pp. 19–24. [Google Scholar]
- Kurozawa, L.E.; Park, K.J.; Hubinger, M.D. Optimization of the enzymatic hydrolysis of chicken meat using response surface methodology. J. Food Sci. 2008, 73, C405–C412. [Google Scholar] [CrossRef]
- Lin, F.J.; Teng, L.T.; Chu, H. A robust recurrent wavelet neural network controller with improved particle swarm optimization for linear synchronous motor drive. IEEE Trans. Power Electron. 2008, 23, 3067–3078. [Google Scholar] [CrossRef]
- Qu, C.; Zhao, S.A.; Fu, Y.; He, W. Chicken swarm optimization based on elite opposition-based learning. Math. Probl. Eng. 2017. [Google Scholar] [CrossRef]
- Wang, B.; Li, W.; Chen, X.; Chen, H. Improved chicken swarm algorithms based on chaos theory and its application in wind power interval prediction. Math. Probl. Eng. 2019. [Google Scholar] [CrossRef]
- Wu, D.; Kong, F.; Gao, W.; Shen, Y.; Ji, Z. Improved chicken swarm optimization. In Proceedings of the 2015 IEEE international conference on cyber technology in automation, control, and intelligent systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 681–686. [Google Scholar]
- Wu, D.; Xu, S.; Kong, F. Convergence analysis and improvement of the chicken swarm optimization algorithm. IEEE Access 2016, 4, 9400–9412. [Google Scholar] [CrossRef]
- Wu, Z.; Yu, D.; Kang, X. Application of improved chicken swarm optimization for MPPT in photovoltaic system. Optim. Control Appl. Methods 2018, 39, 1029–1042. [Google Scholar] [CrossRef]
- Yaseen, H.T.; Mitras, B.A.; Khidhir, A.S.M. Hybrid Invasive Weed Optimization Algorithm with Chicken Swarm Optimization Algorithm to solve Global Optimization Problems. Int. J. Comput. Netw. Commun. Secur. 2018, 6, 173–181. [Google Scholar]
- Zarlis, M.; Yanto, I.T.R.; Hartama, D. A framework of training ANFIS using chicken swarm optimization for solving classification problems. In Proceedings of the 2016 International conference on informatics and computing (ICIC), Mataram, Indonesia, 28–30 October 2016; pp. 437–441. [Google Scholar]
- Liang, J.; Wang, L.; Ma, M.; Zhang, J. A fast SAR image segmentation method based on improved chicken swarm optimization algorithm. Multimed. Tools Appl. 2018, 77, 31787–31805. [Google Scholar] [CrossRef]
- Miramontes, I.; Melin, P.; Prado-Arechiga, G. Comparative Study of Bio-inspired Algorithms Applied in the Optimization of Fuzzy Systems. In Hybrid Intelligent Systems in Control, Pattern Recognition and Medicine; Springer: Cham, Switzerland, 2020; pp. 219–231. [Google Scholar]
- Tripathi, A.K.; Garg, P.; Tripathy, A.; Vats, N.; Gupta, D.; Khanna, A. Prediction of Cervical Cancer Using Chicken Swarm Optimization. In International Conference on Innovative Computing and Communications; Springer: Singapore, 2020; pp. 591–604. [Google Scholar]
- Lu, K.; Zhou, W.; Zeng, G.; Zheng, Y. Constrained population extremal optimization-based robust load frequency control of multi-area interconnected power system. Int. J. Electr. Power Energy Syst. 2019, 105, 249–271. [Google Scholar] [CrossRef]
- Zeng, G.Q.; Chen, J.; Dai, Y.X.; Li, L.M.; Zheng, C.W.; Chen, M.R. Design of fractional order PID controller for automatic regulator voltage system based on multi-objective extremal optimization. Neurocomputing 2015, 160, 173–184. [Google Scholar] [CrossRef]
- Huh, J.H.; Seo, Y.S. Understanding edge computing: Engineering evolution with artificial intelligence. IEEE Access 2019, 7, 164229–164245. [Google Scholar] [CrossRef]
- Kim, J.C.; Huh, J.H.; Ko, J.S. Improvement of MPPT control performance using fuzzy control and VGPI in the PV system for micro grid. Sustainability 2019, 11, 5891. [Google Scholar] [CrossRef]
- Amador-Angulo, L.; Castillo, O. Optimization of Fuzzy Trajectory Tracking in Autonomous Mobile Robots Based on Bio-inspired Algorithms. In Recent Advances of Hybrid Intelligent Systems Based on Soft Computing; Springer: Cham, Switzerland, 2021; pp. 249–271. [Google Scholar]
- Kim, J.C.; Huh, J.H.; Ko, J.S. Optimization design and test bed of fuzzy control rule base for PV system MPPT in micro grid. Sustainability 2020, 12, 3763. [Google Scholar] [CrossRef]
- Li, Y.; Wu, Y.; Qu, X. Chicken swarm–based method for ascent trajectory optimization of hypersonic vehicles. J. Aerosp. Eng. 2017, 30, 04017043. [Google Scholar] [CrossRef]
- Amador-Angulo, L.; Castillo, O. Optimal Design of Fuzzy Logic Systems Through a Chicken Search Optimization Algorithm Applied to a Benchmark Problem. In Recent Advances of Hybrid Intelligent Systems Based on Soft Computing; Springer: Cham, Switzerland, 2021; pp. 229–247. [Google Scholar]
- Liang, X.; Kou, D.; Wen, L. An Improved Chicken Swarm Optimization Algorithm and its Application in Robot Path Planning. IEEE Access 2020, 8, 49543–49550. [Google Scholar] [CrossRef]
- Mu, Y.; Zhang, L.; Chen, X.; Gao, X. Optimal trajectory planning for robotic manipulators using chicken swarm optimization. In Proceedings of the 2016 8th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 27–28 August 2016; Volume 2, pp. 369–373. [Google Scholar]
- Wu, Y.; Yan, B.; Qu, X. Improved chicken swarm optimization method for reentry trajectory optimization. Math. Probl. Eng. 2018. [Google Scholar] [CrossRef]
- Amador-Angulo, L.; Mendoza, O.; Castro, J.R.; Rodríguez-Díaz, A.; Melin, P.; Castillo, O. Fuzzy sets in dynamic adaptation of parameters of a bee colony optimization for controlling the trajectory of an autonomous mobile robot. Sensors 2016, 16, 1458. [Google Scholar] [CrossRef] [PubMed]
- Caraveo, C.; Valdez, F.; Castillo, O. Optimization of fuzzy controller design using a new bee colony algorithm with fuzzy dynamic parameter adaptation. Appl. Soft Comput. 2016, 43, 131–142. [Google Scholar] [CrossRef]
- Baygi, S.M.H.; Karsaz, A.; Elahi, A. A hybrid optimal PID-fuzzy control design for seismic exited structural system against earthquake: A salp swarm algorithm. In Proceedings of the 2018 6th Iranian Joint Congress on Fuzzy and Intelligent Systems (CFIS), Kerman, Iran, 28 February–2 March 2018; pp. 220–225. [Google Scholar]
- Bhattacharjee, V.; Chatterjee, D.; Karabasoglu, O. Hybrid control strategy for a semi active suspension system using fuzzy logic and bio-inspired chaotic fruit fly algorithm. arXiv 2017, arXiv:1703.08878. [Google Scholar]
- Banjanovic-Mehmedovic, L.; Baluković, A. PSO Optimized Fuzzy Controller for Mobile Robot Path Tracking. In International Conference “New Technologies, Development and Applications”; Springer: Cham, Switzerland, 2020; pp. 413–421. [Google Scholar]
- Carvajal, O.R.; Castillo, O.; Soria, J. Optimization of membership function parameters for fuzzy controllers of an autonomous mobile robot using the flower pollination algorithm. J. Autom. Mob. Robot. Intell. Syst. 2018, 12, 44–49. [Google Scholar] [CrossRef]
- García-Gutiérrez, G.; Arcos-Aviles, D.; Carrera, E.V.; Guinjoan, F.; Motoasca, E.; Ayala, P.; Ibarra, A. Fuzzy logic controller parameter optimization using metaheuristic cuckoo search algorithm for a magnetic levitation system. Appl. Sci. 2019, 9, 2458. [Google Scholar] [CrossRef]
- Hernández, E.; Castillo, O.; Soria, J. Design of Optimal Fuzzy Controllers for Autonomous Mobile Robots Using the Grey Wolf Algorithm. In International Fuzzy Systems Association World Congress; Springer: Cham, Switzerland, 2019; pp. 285–295. [Google Scholar]
- Huang, H.C. Fusion of modified bat algorithm soft computing and dynamic model hard computing to online self-adaptive fuzzy control of autonomous mobile robots. IEEE Trans. Ind. Inform. 2016, 12, 972–979. [Google Scholar] [CrossRef]
- Khooban, M.H.; Liaghat, A. A time-varying strategy for urban traffic network control: A fuzzy logic control based on an improved black hole algorithm. Int. J. Bio-Inspired Comput. 2017, 10, 33–42. [Google Scholar] [CrossRef]
- Lagunes, M.L.; Castillo, O.; Soria, J. Optimization of membership function parameters for fuzzy controllers of an autonomous mobile robot using the firefly algorithm. In Fuzzy Logic Augmentation of Neural and Optimization Algorithms: Theoretical Aspects and Real Applications; Springer: Cham, Switzerland, 2018; pp. 199–206. [Google Scholar]
- Ni, J.; Wu, L.; Fan, X.; Yang, S.X. Bioinspired intelligent algorithm and its applications for mobile robot control: A survey. Comput. Intell. Neurosci. 2016. [Google Scholar] [CrossRef]
- Villa, T.C.; Castillo, O. Adaptation of Parameters with Binary Cat Swarm Optimization Algorithm of Controller for a Mobile Autonomous Robot. In Hybrid Intelligent Systems in Control, Pattern Recognition and Medicine; Springer: Cham, Switzerland, 2020; pp. 35–46. [Google Scholar]
- Yen, C.T.; Cheng, M.F. A study of fuzzy control with ant colony algorithm used in mobile robot for shortest path planning and obstacle avoidance. Microsyst. Technol. 2018, 24, 125–135. [Google Scholar] [CrossRef]
- Chen, H.M.; Chen, Z.Y.; Su, J.P. Design of a sliding mode controller for a water tank liquid level control system. In Proceedings of the Second International Conference on Innovative Computing, Information and Control (ICICIC 2007), Kumamoto, Japan, 5–7 September 2007; p. 335. [Google Scholar]
- Hassanzadeh, I.; Mobayen, S. Controller design for rotary inverted pendulum system using evolutionary algorithms. Math. Probl. Eng. 2011. [Google Scholar] [CrossRef]
- Margaliot, M.; Langholz, G. Fuzzy control of a benchmark problem: A computing with words approach. IEEE Trans. Fuzzy Syst. 2004, 12, 230–235. [Google Scholar] [CrossRef]
- Akhmedova, S.; Semenkin, E.; Stanovov, V.; Vishnevskaya, S. Fuzzy logic controller design for tuning the cooperation of biology-inspired algorithms. In Proceedings of the International Conference on Swarm Intelligence, Fukuoka, Japan, 27 July–1 August 2017; pp. 269–276. [Google Scholar]
- Baker, A.A.; Ghadi, Y.Y. Autonomous system to control a mobile robot. Bull. Electr. Eng. Inform. 2020, 9, 1711–1717. [Google Scholar] [CrossRef]
- Lubin, T.; Mendes, E.; Marchand, C. Fuzzy controller in AC servo motor drive. In Proceedings of the 1995 Seventh International Conference on Electrical Machines and Drives, Durham, UK, 11–13 September 1995. [Google Scholar] [CrossRef]
- Rodriguez-Angeles, A.; Vazquez Chavez, L.F. Bio-inspired decentralized autonomous robot mobile navigation control for multi agent systems. Kybernetika 2018, 54, 135–154. [Google Scholar] [CrossRef]
- Meng, X.; Liu, Y.; Gao, X.; Zhang, H. A new bio-inspired algorithm: Chicken swarm optimization. In Proceedings of the International Conference in Swarm Intelligence, Hefei, China, 17–20 October 2014; pp. 86–94. [Google Scholar]
- Zadeh, L.A. The concept of a linguistic variable and its application to approximate reasoning. Part II Inf. Sci. 1975, 8, 301–357. [Google Scholar] [CrossRef]
- Zadeh, L.A. Toward a theory of fuzzy information granulation and its centrality in human reasoning and fuzzy logic. Fuzzy Sets Syst. 1997, 90, 111–127. [Google Scholar] [CrossRef]
- Mamdani, E.H. Application of fuzzy algorithms for control of simple dynamic plant. Proc. Inst. Electr. Eng. IET 1974, 121, 1585–1588. [Google Scholar] [CrossRef]
- Kumar, A.; Saini, B. A Sugeno-Mamdani Fuzzy System Based Soft Computing Approach Towards Sensor Node Localization with Optimization. In Proceedings of the International Conference on Next Generation Computing Technologies, Dehradun, India, 30–31 October 2017; pp. 40–55. [Google Scholar]
- Devi, M.S.; Soranamageswari, M. A hybrid technique of Mamdani and Sugeno based fuzzy interference system approach. In Proceedings of the 2016 International Conference on Data Mining and Advanced Computing (SAPIENCE), Ernakulam, India, 16–18 March 2016; pp. 340–342. [Google Scholar]
- Siettos, C.I.; Bafas, G.V. Semiglobal stabilization of nonlinear systems using fuzzy control and singular perturbation methods. Fuzzy Sets Syst. 2002, 129, 275–294. [Google Scholar] [CrossRef]
- Ontiveros-Robles, E.; Melin, P.; Castillo, O. Comparative analysis of noise robustness of type 2 fuzzy logic controllers. Kybernetika 2018, 54, 175–201. [Google Scholar] [CrossRef]
- Liu, H.; Hao, K.; Lai, X. Fuzzy saturated output feedback tracking control for robot manipulators: A singular perturbation theory based approach. Int. J. Adv. Robot. Syst. 2011, 8, 35. [Google Scholar] [CrossRef]
- Sáez, J.A.; Galar, M.; Luengo, J.; Herrera, F. INFFC: An iterative class noise filter based on the fusion of classifiers with noise sensitivity control. Inf. Fusion 2016, 27, 19–32. [Google Scholar] [CrossRef]
- Wu, L.; Su, X.; Shi, P. Fuzzy Control Systems with Time-Delay and Stochastic Perturbation; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Li, T.H.S.; Lin, K.J. Composite fuzzy control of nonlinear singularly perturbed systems. IEEE Trans. Fuzzy Syst. 2007, 15, 176–187. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, W.H.; Lu, X. Robust fuzzy stabilization of nonlinear time-delay systems subject to impulsive perturbations. Commun. Nonlinear Sci. Numer. Simul. 2020, 80, 104953. [Google Scholar] [CrossRef]
- Amador-Angulo, L.; Castillo, O. A new fuzzy bee colony optimization with dynamic adaptation of parameters using interval type-2 fuzzy logic for tuning fuzzy controllers. Soft Comput. 2018, 22, 571–594. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Problem | Input | Output | Total Size of Vector | ||
|---|---|---|---|---|---|
| Total | Type of MFs | Total | Type of MFs | ||
| Water Tank Controller | 2 | 3—Triangular in each Input | 1 | 5–Triangular in each output | 33 |
| Inverted Pendulum Controller | 4 | 2—Trapezoidal in each Input | Sugeno-Takagi (Function) | 32 | |
| Autonomous Mobile Robot Controller | 2 | Trapezoidal—Triangular—Trapezoidal | 2 | 3—Triangular in each Output | 40 |
| Parameters | Values |
|---|---|
| N (Population) | 30 |
| RN | 0.15 * N |
| HN | 0.7 * N |
| MN | 0.15 * N |
| G | 10 |
| FL | [0.5, 0.9] |
| Generations | 40 |
| Parameters | Values |
|---|---|
| N (Population) | 20 |
| RN | 0.15 * N |
| HN | 0.7 * N |
| MN | 0.15 * N |
| G | 10 |
| FL | [0.5, 0.9] |
| Generations | 15 |
| Control Problem | Performance Index | Types of Experiment | ||
|---|---|---|---|---|
| Not AP | Type-1 Perturbation | Type-2 Perturbation | ||
| Water Tank Controller | ITAE | 2.77 × 10+5 | 2.94 × 10+5 | 3.05 × 10+5 |
| ITSE | 7.26 × 10+5 | 7.80 × 10+5 | 8.27 × 10+5 | |
| IAE | 1.08 × 10+3 | 1.15 × 10+3 | 1.23 × 10+3 | |
| ISE | 2.77 × 10+3 | 3.00 × 10+3 | 3.38 × 10+3 | |
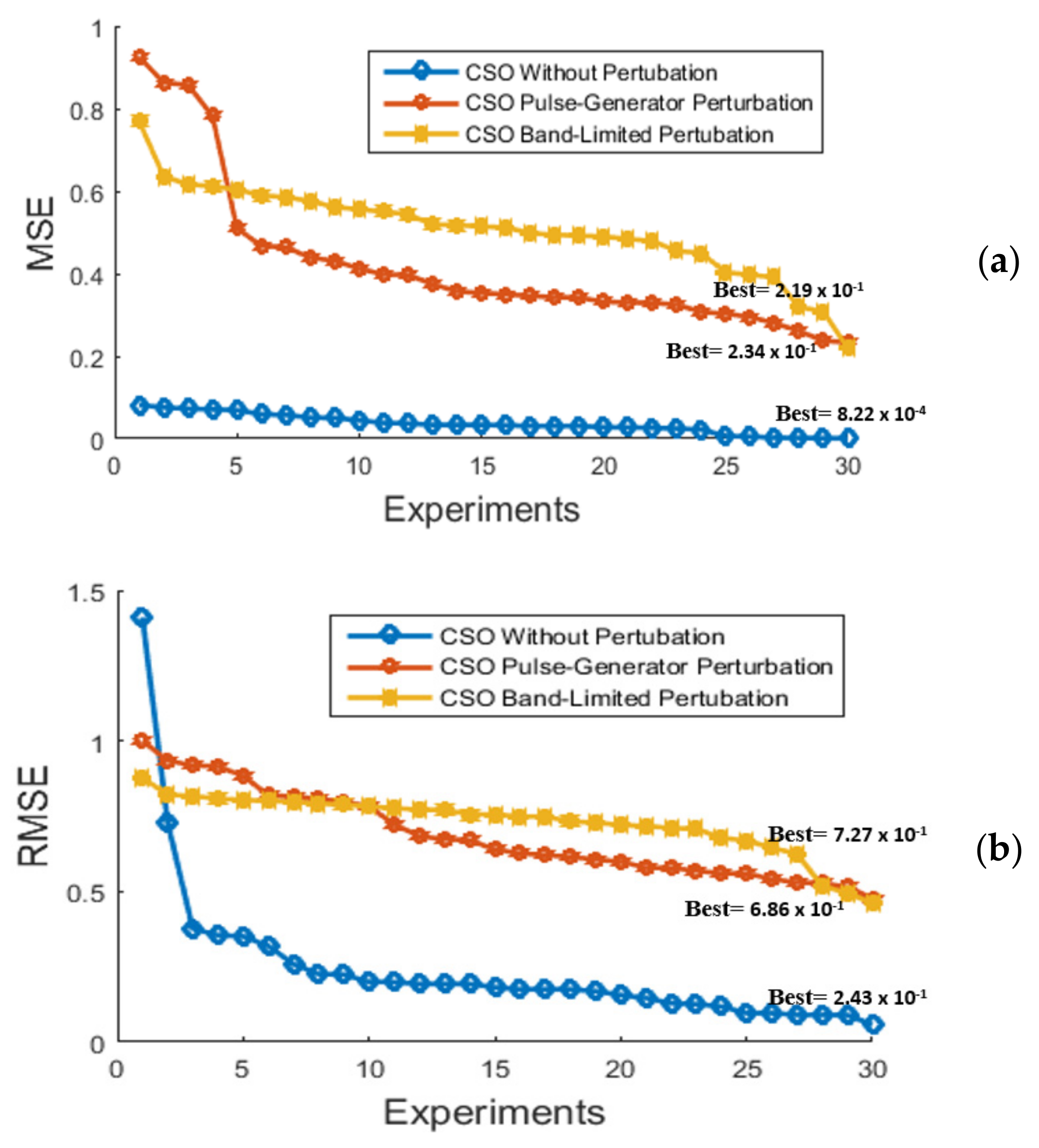
| RMSE | 2.43 × 10−1 | 6.86 × 10−1 | 7.27 × 10−1 | |
| Inverted Pendulum Controller | ITAE | 2.23 × 10+2 | 2.23 × 10+2 | 2.84 × 10+2 |
| ITSE | 5.59 × 10+2 | 5.58 × 10+2 | 6.07 × 10+2 | |
| IAE | 2.78 × 10+1 | 2.77 × 10+1 | 3.12 × 10+1 | |
| ISE | 6.93 × 10+1 | 6.94 × 10+1 | 7.02 × 10+1 | |
| RMSE | 1.48 × 100 | 1.48 × 100 | 8.76 × 10−1 | |
| Autonomous Mobile Robot Controller | ITAE | 3.37 × 10+2 | 3.41 × 10+2 | 3.41 × 10+2 |
| ITSE | 1.38 × 10+2 | 1.42 × 10+2 | 1.41 × 10+2 | |
| IAE | 1.44 × 10+1 | 1.46 × 10+1 | 1.46 × 10+1 | |
| ISE | 6.07 × 100 | 6.28 × 100 | 6.21 × 100 | |
| RMSE | 2.06 × 10−1 | 2.14 × 10−1 | 2.03 × 10−1 | |
| Control Problem | Performance Index | Types of Experiment | ||
|---|---|---|---|---|
| Not AP | Type-1 Perturbation | Type-2 Perturbation | ||
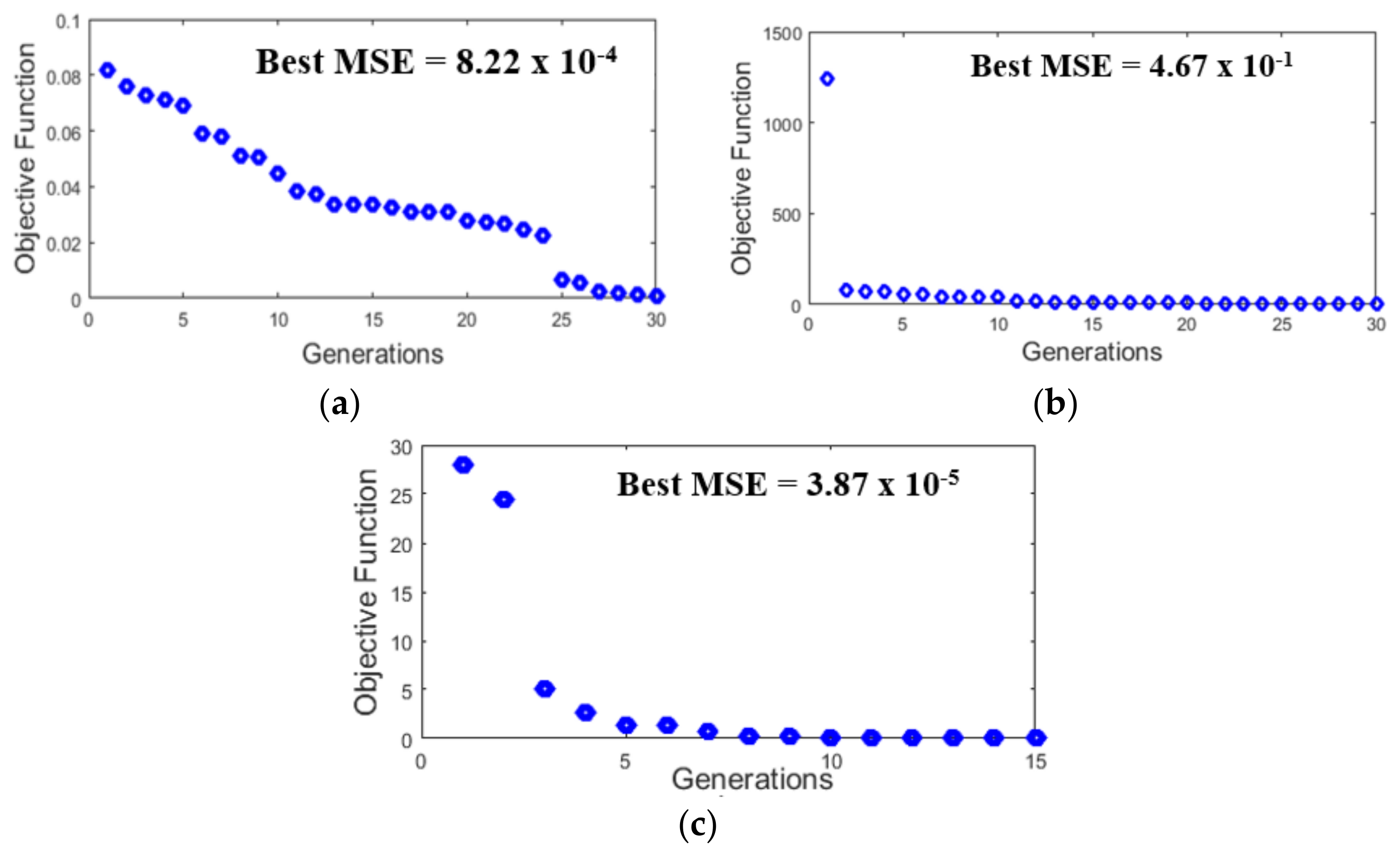
| Water Tank Controller | BEST | 8.22 × 10−4 | 2.34 × 10−1 | 2.19 × 10−1 |
| WORST | 8.17 × 10−2 | 9.25 × 10−1 | 7.69 × 10−1 | |
| AVERAGE | 3.61 × 10−2 | 4.21 × 10−1 | 5.05 × 10−1 | |
| STANDARD DEVIATION (σ) | 2.35 × 10−2 | 1.86 × 10−1 | 1.09 × 10−1 | |
| Inverted Pendulum Controller | BEST | 4.67 × 10−1 | 4.80 × 10−1 | 5.79 × 10−1 |
| WORST | 5.98 × 100 | 5.69 × 100 | 1.77 × 100 | |
| AVERAGE | 2.29 × 100 | 2.35 × 100 | 8.59 × 10−1 | |
| STANDARD DEVIATION (σ) | 1.84 × 100 | 1.79 × 100 | 3.66 × 10−1 | |
| Autonomous Mobile Robot Controller | BEST | 3.87 × 10−5 | 7.56 × 10−3 | 3.81 × 10−4 |
| WORST | 1.44 × 100 | 2.16 × 100 | 3.48 × 10−1 | |
| AVERAGE | 1.35 × 10−1 | 1.79 × 10−1 | 6.99 × 10−2 | |
| STANDARD DEVIATION (σ) | 2.63 × 10−1 | 4.18 × 10−1 | 8.63 × 10−2 | |
| Method | Control Problem | Minimum | Maximum | Average RMSE | Population | Iterations (BCO)—Generations (CSO) |
|---|---|---|---|---|---|---|
| Proposed CSO Algorithm | Water Tank Controller | 8.22 × 10−4 | 8.17 × 10−2 | 2.43 × 10−1 | 30 | 40 |
| BCO Algorithm [65] | Water Tank Controller | 5.50 × 10−2 | 1.47 × 10−1 | 5.60 × 10−1 | 50 | 30 |
| Proposed CSO Algorithm | Autonomous Mobile Robot Controller | 3.87 × 10−5 | 1.44 × 100 | 2.06 × 10−1 | 20 | 15 |
| BCO Algorithm [65] | Autonomous Mobile Robot Controller | 2.00 × 10−3 | 1.40 × 10+1 | 2.26 × 10+1 | 50 | 30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amador-Angulo, L.; Castillo, O.; Peraza, C.; Ochoa, P. An Efficient Chicken Search Optimization Algorithm for the Optimal Design of Fuzzy Controllers. Axioms 2021, 10, 30. https://doi.org/10.3390/axioms10010030
Amador-Angulo L, Castillo O, Peraza C, Ochoa P. An Efficient Chicken Search Optimization Algorithm for the Optimal Design of Fuzzy Controllers. Axioms. 2021; 10(1):30. https://doi.org/10.3390/axioms10010030
Chicago/Turabian StyleAmador-Angulo, Leticia, Oscar Castillo, Cinthia Peraza, and Patricia Ochoa. 2021. "An Efficient Chicken Search Optimization Algorithm for the Optimal Design of Fuzzy Controllers" Axioms 10, no. 1: 30. https://doi.org/10.3390/axioms10010030
APA StyleAmador-Angulo, L., Castillo, O., Peraza, C., & Ochoa, P. (2021). An Efficient Chicken Search Optimization Algorithm for the Optimal Design of Fuzzy Controllers. Axioms, 10(1), 30. https://doi.org/10.3390/axioms10010030