
Improvement of DS Evidence Theory for Multi-Sensor Conflicting Information


Abstract
:1. Introduction
2. Theoretical Foundations
2.1. Frame of Discernment
2.2. Basic Probability Assignment
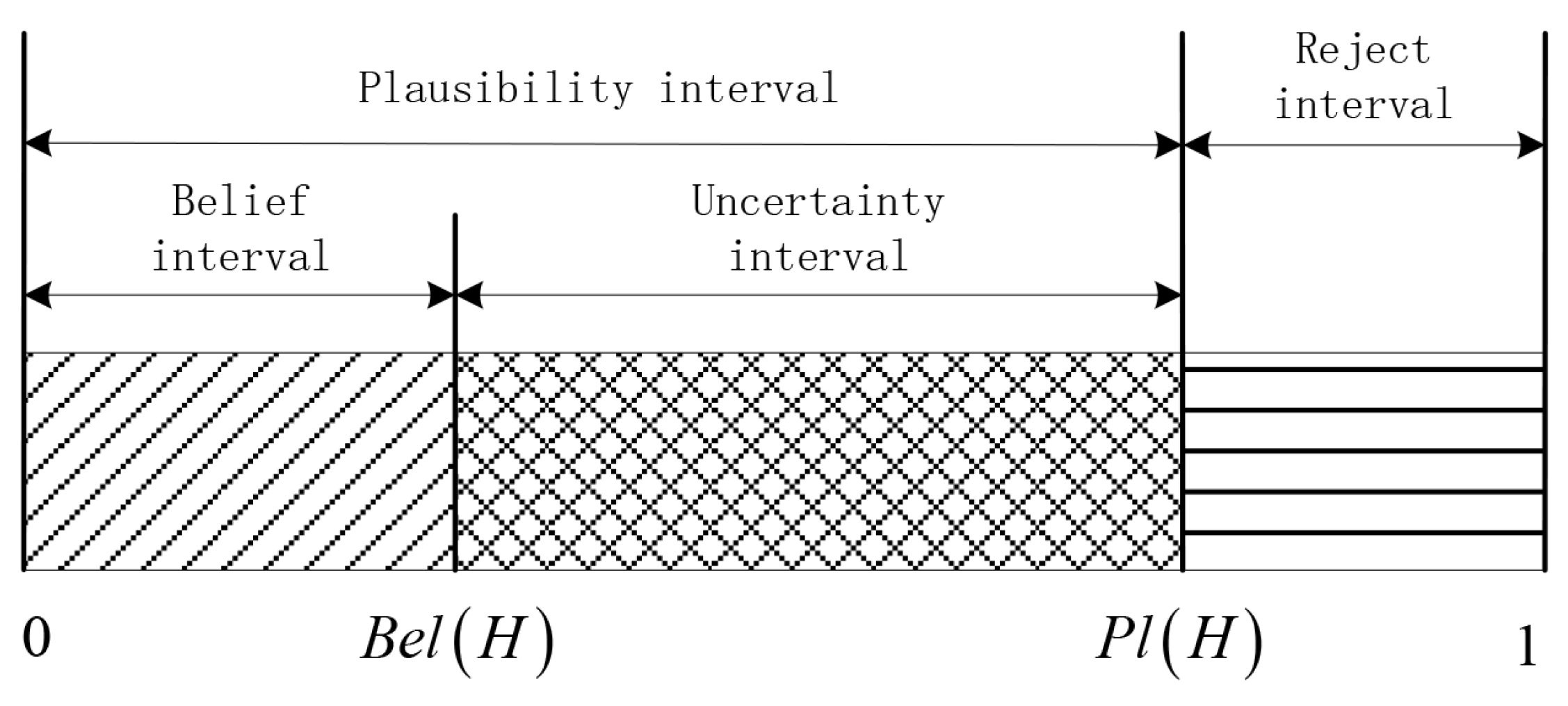
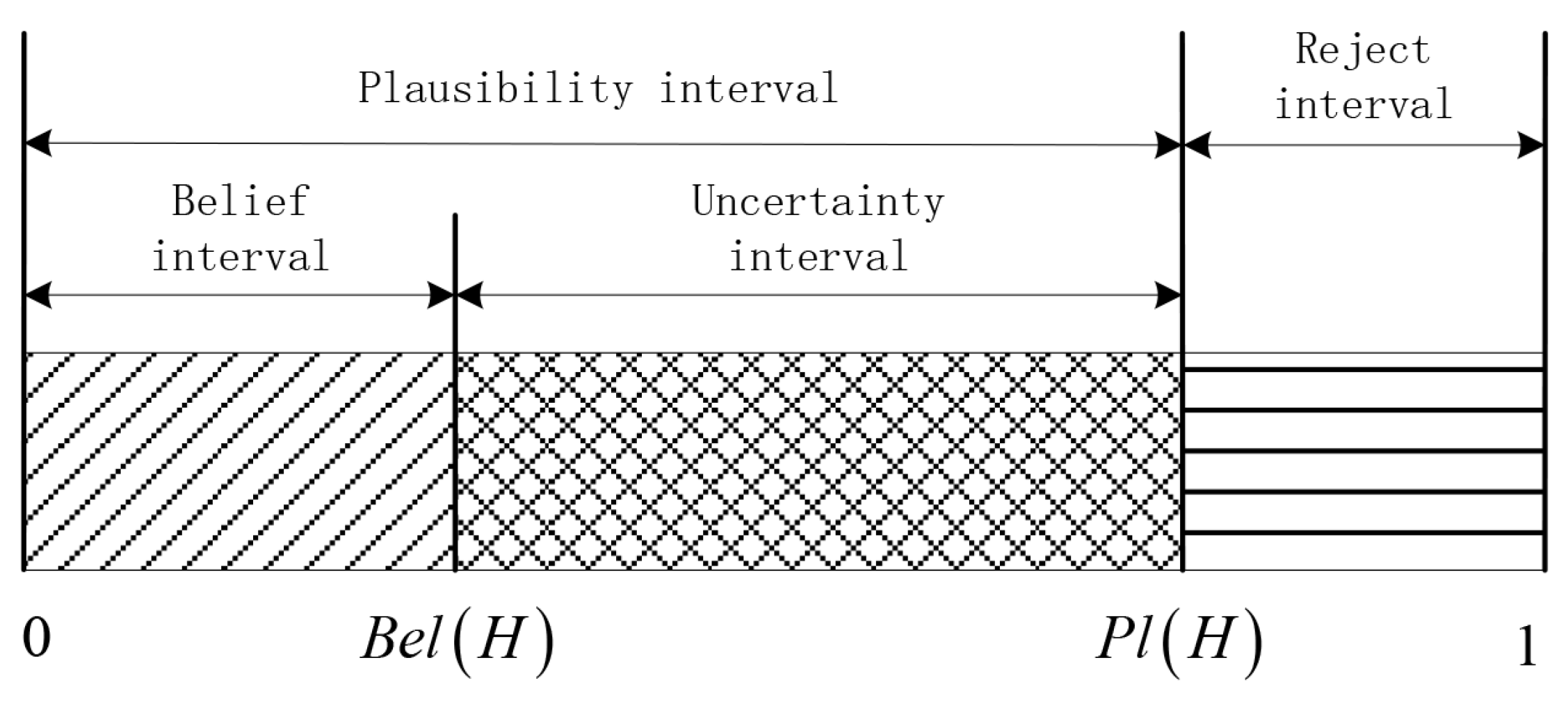
2.3. Uncertainty Description
2.4. DS Combination Rule
3. Fuse Paradoxes of DS Theory
- Conflict situations commonly occur in multi-sensor fusion systems. The way to fuse conflicting information is the key to realizing multi-sensor information fusion.
- All three conflict situations have one common point—the conflict degree K is high. The way to combine highly conflicting evidence is the key to solving conflict situations.
4. Existing Modified Methods
4.1. Combination Rule Based on Local Conflict Degrees
4.2. Combination Method Based on Mahalanobis Evidence
5. The Improvement of DS Theory
5.1. Revised Evidence Based on the Lance Distance Function
5.2. Revised Evidence Based on Spectral Angle Cosine Function
5.3. Improved Conflict Redistribution Strategy
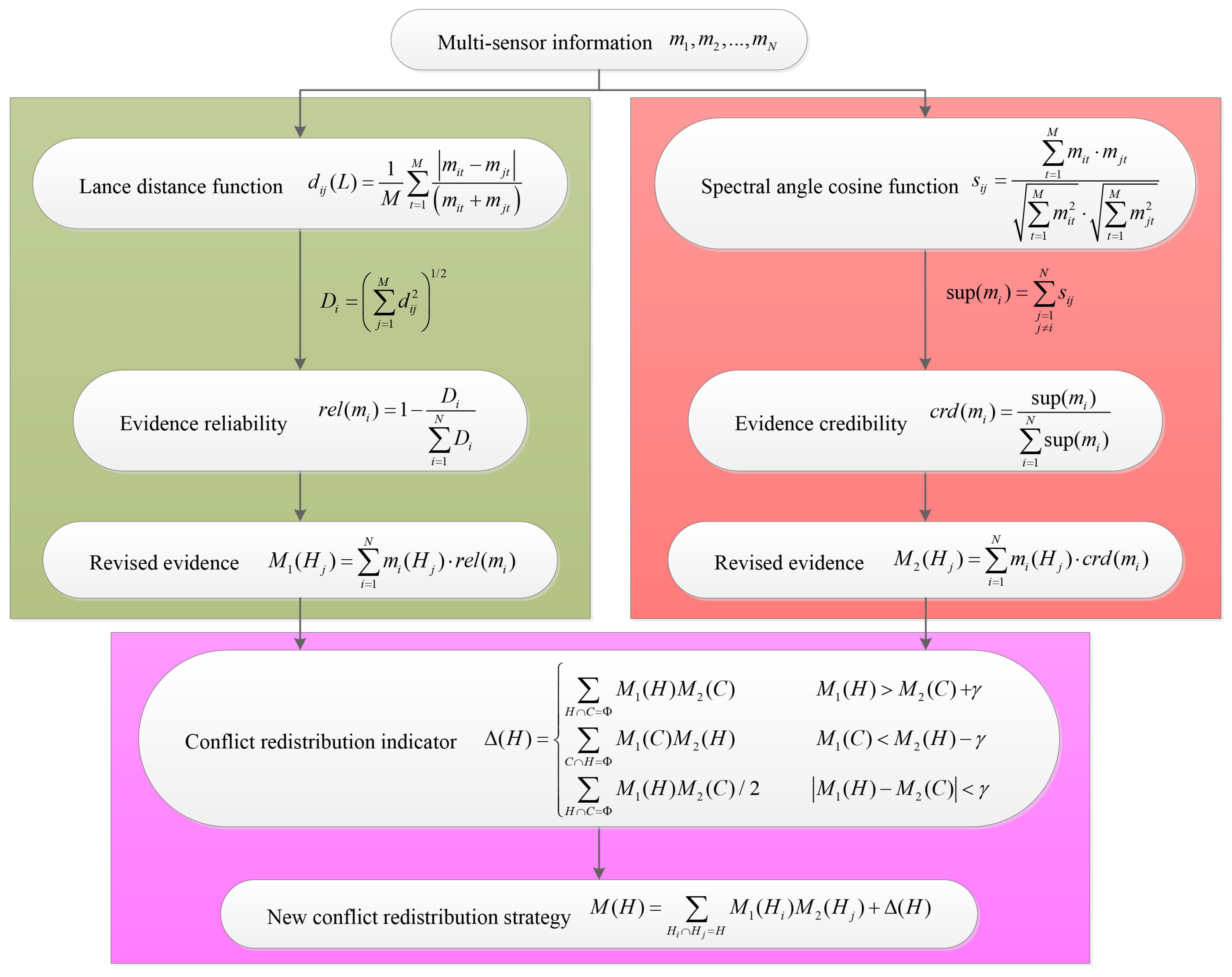
5.4. Flow Chart of the Proposed Algorithm
- Step 1:
- Revise original evidence by the introduction of the Lance distance function.
- Step 2:
- Revise original evidence by the introduction of the spectral angle cosine function.
- Step 3:
- Redistribute the conflict degree of two pieces of revised evidence by employing a new redistribution strategy.
6. Simulation Results and Analyses
6.1. Multi-Sensor Fusion with Consistent Information
- In the fusion results of the DS combination rule, although the support to the true target A is the biggest, the support to target B is always 0. Through the observation of Table 1, we can conclude that the “one ballot veto” paradox described in Section 3 leads to the unreasonable reasoning, and the paradox is caused by .
- References [15,16] represent the former kind of methods that are discussed in Section 1, while K-L distance [23] and Mahalanobis distance [24] represent the latter kind of methods that are discussed in Section 1. These four methods all give reasonable fusion results and recognize the true target A precisely.
6.2. Multi-Sensor Fusion with Conflicting Information
- The fusion result of the DS combination rule completely believes that B is the true target, which is contrary to intuition judgement. Obviously, the DS combination rule cannot achieve reliable fusion for conflicting information.
- With the combination of added evidence , the support degree of true target A in reference [16], K-L distance [23], and Mahalanobis distance [24] is growing. However, the growth is slow, which means that reference [16], K-L distance [23], and Mahalanobis distance [24] are not completely reliable combination methods under conflict situations.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fan, X.; Zuo, M.J. Fault diagnosis of machines based on D-S evidence theory. Part 1: D-S evidence theory and its improvement. Pattern Recognit. Lett. 2006, 27, 366–376. [Google Scholar] [CrossRef]
- Deng, Y. Deng entropy. Chaos Solitons Fractals 2016, 91, 549–553. [Google Scholar] [CrossRef]
- Deng, Y. A threat assessment model under uncertain environment. Math. Probl. Eng. 2015, 201, 1–12. [Google Scholar] [CrossRef]
- Parikh, C.R.; Pont, M.J.; Jones, N.B. Application of Dempster–Shafer theory in condition monitoring applications: A case study. Pattern Recognit. Lett. 2001, 22, 777–785. [Google Scholar] [CrossRef]
- Dymova, L.; Sevastjanov, L. An interpretation of intuitionistic fuzzy sets in terms of evidence theory: Decision making aspect. Knowl. Based Syst. 2010, 23, 772–782. [Google Scholar] [CrossRef]
- Kang, J.; Gu, Y.B.; Li, Y.B. Multi-sensor information fusion algorithm based on DS evidence theory. J. Chin. Inert. Technol. 2012, 20, 670–673. [Google Scholar]
- Fan, X.F.; Zuo, M.J. Fault diagnosis of machines based on D-S evidence theory. Part 2: Application of the improved D-S evidence theory in gearbox fault diagnosis. Pattern Recognit. Lett. 2006, 27, 377–385. [Google Scholar] [CrossRef]
- Basir, O.; Yuan, X. Engine fault diagnosis based on multi-sensor information fusion using Dempster–Shafer evidence theory. Inf. Fusion 2007, 8, 379–386. [Google Scholar] [CrossRef]
- Dong, G.; Kuang, G. Target Recognition via Information Aggregation Through Dempster–Shafer’s Evidence Theory. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1247–1251. [Google Scholar] [CrossRef]
- Dezert, J. Autonomous navigation with uncertain reference points using the PDAF. In Multitarget-Multisensor Tracking; Bar-Shalom, Y., Ed.; Artech House: Norwood, MA, USA, 1991; Volume 2, pp. 271–324. [Google Scholar]
- Smarandache, F.; Dezert, J. An introduction to DSm theory of plausible, paradoxist, uncertain, and imprecise reasoning for information fusion. Octogon Math. Mag. 2007, 15, 681–722. [Google Scholar]
- Zadeh, L.A. Book Review: A Mathematical Theory of Evidence. Bull. Am. Math. Soc. 1984, 10, 235–247. [Google Scholar] [CrossRef]
- Smets, P. The combination of evidence in the transferable belief model. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 447–458. [Google Scholar] [CrossRef]
- Yager, R.R. On the aggregation of prioritized belief structures. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 26, 708–717. [Google Scholar] [CrossRef]
- Sun, Q.; Ye, X.Q.; Gu, W.K. A new combination rules of evidence theory. Chin. J. Electron. 2000, 28, 117–119. [Google Scholar]
- Li, B.C.; Huang, J.; Yin, H.J. Two efficient combination rules for conflicting belief functions. In Proceedings of the International Conference on Artificial Intelligence and Computational Intelligence, Shanghai, China, 7–8 November 2009; Volume 61, pp. 421–426. [Google Scholar]
- Zhang, B.; Lu, H.Z. Combination method of conflict evidence in multi-sensor automatic target recognition. Syst. Eng. Electron. 2006, 28, 857–860. [Google Scholar]
- Zhang, S.; Pan, Q.; Zhang, H. A New Kind of Combination Rule of Evidence Theory. Control Decis. 2000, 15, 540–544. [Google Scholar]
- Murphy, C.K. Combining belief functions when evidence conflicts. Decis. Support Syst. 2000, 29, 1–9. [Google Scholar] [CrossRef]
- Horiuchi, T. Decision rule for pattern classification by integrating interval feature values. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 440–448. [Google Scholar] [CrossRef]
- Deng, Y.; She, W.K.; Zhu, Z.F. Efficient combination approach of conflict evidence. J. Infrared Millim. Waves 2004, 23, 27–32. [Google Scholar]
- Guo, H.W.; Shi, W.K.; Liu, Q.K.; Deng, Y. A new combination rule of evidence. J. Shanghai Jiaotong Univ. 2007, 40, 1895–1900. [Google Scholar]
- Wei, Y.C. An improved D-S evidence combination method based on K-L distance. Telecommun. Eng. 2011, 27, 255–257. [Google Scholar]
- Lin, Y.; Wang, C.; Ma, C.; Dou, Z.; Ma, X. A new combination method for multisensor conflict information. J. Supercomput., 2016, 72, 2874–2890. [Google Scholar] [CrossRef]
- Hardle, W.; Simar, L. Applied Multivariate Statistical Analysis; Springer: New York, NY, USA, 2015; pp. 41–60. [Google Scholar]
- Banks, D.; Mcmorris, F.R.; Arabie, P.; Gaul, W. Classification, Clustering, and Data Mining Applications. In Proceedings of the Meeting of the International Federation of Classification Societies (IFCS), Chicago, IL, USA, 15–18 July 2004; Illinois Institute of Technology: Chicago, IL, USA, 2004. [Google Scholar]
- Dempster, A.P. Upper and lower probabilities induced by a multi-valued mapping. Ann. Math. Stat. 1967, 38, 325–329. [Google Scholar] [CrossRef]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976. [Google Scholar]
- Everitt, B.S.; Landau, S.; Leese, M.; Stahl, D. Cluster Analysis, 5th ed.; John Wiley and Sons, Ltd.: London, UK, 2011; pp. 43–70. [Google Scholar]


{kind=link}
{kind=link}
| Sensors | Targets | ||
|---|---|---|---|
| 0.90 | 0 | 0.10 | |
| 0.88 | 0.01 | 0.11 | |
| 0.50 | 0.20 | 0.30 | |
| 0.98 | 0.01 | 0.01 | |
| 0.90 | 0.05 | 0.05 | |
| Methods | Targets | ||||
|---|---|---|---|---|---|
| DS combination | A | 0.9863 | 0.9917 | 0.9999 | 1 |
| B | 0 | 0 | 0 | 0 | |
| C | 0.0137 | 0.0083 | 0.0001 | 0 | |
| 0 | 0 | 0 | 0 | ||
| Reference [15] | A | 0.9360 | 0.6978 | 0.7454 | 0.7492 |
| B | 0.0008 | 0.0278 | 0.0241 | 0.0260 | |
| C | 0.0280 | 0.0708 | 0.0570 | 0.0547 | |
| 0.0352 | 0.2036 | 0.1735 | 0.1701 | ||
| Reference [16] | A | 0.9673 | 0.8525 | 0.8868 | 0.8480 |
| B | 0.0010 | 0.0421 | 0.0337 | 0.0337 | |
| C | 0.0317 | 0.1054 | 0.0795 | 0.0795 | |
| 0 | 0 | 0 | 0 | ||
| K-L distance [23] | A | 0.9673 | 0.5365 | 0.5236 | 0.5799 |
| B | 0.0010 | 0.0246 | 0.0165 | 0.0216 | |
| C | 0.0317 | 0.0825 | 0.0606 | 0.0561 | |
| 0 | 0.3564 | 0.3993 | 0.3423 | ||
| Mahalanobis distance [24] | A | 0.9605 | 0.6738 | 0.6671 | 0.7128 |
| B | 0.0011 | 0.0206 | 0.0177 | 0.0236 | |
| C | 0.0340 | 0.0883 | 0.0700 | 0.0658 | |
| 0.0044 | 0.2173 | 0.2452 | 0.1978 | ||
| Proposed | A | 0.9878 | 0.9446 | 0.9668 | 0.9729 |
| B | 0.0006 | 0.0159 | 0.0097 | 0.0086 | |
| C | 0.0116 | 0.0395 | 0.0235 | 0.0185 | |
| 0 | 0 | 0 | 0 |
| Sensors | Targets | ||
|---|---|---|---|
| 0.90 | 0 | 0.10 | |
| 0 | 0.01 | 0.99 | |
| 0.50 | 0.20 | 0.30 | |
| 0.98 | 0.01 | 0.01 | |
| 0.90 | 0.05 | 0.05 | |
| Methods | Targets | ||||
|---|---|---|---|---|---|
| DS combination | A | 0 | 0 | 0 | 0 |
| B | 0 | 0 | 0 | 0 | |
| C | 1 | 1 | 1 | 1 | |
| 0 | 0 | 0 | 0 | ||
| Reference [15] | A | 0.1647 | 0.2232 | 0.3192 | 0.3781 |
| B | 0.0019 | 0.0335 | 0.0295 | 0.0311 | |
| C | 0.2984 | 0.2513 | 0.1881 | 0.1671 | |
| 0.5350 | 0.4920 | 0.4632 | 0.4237 | ||
| Reference [16] | A | 0.4055 | 0.4528 | 0.5948 | 0.5951 |
| B | 0.0045 | 0.0679 | 0.0550 | 0.0550 | |
| C | 0.5900 | 0.4793 | 0.3502 | 0.3499 | |
| 0 | 0 | 0 | 0 | ||
| K-L distance [23] | A | 0.4055 | 0.3502 | 0.4446 | 0.5249 |
| B | 0.0045 | 0.0677 | 0.0523 | 0.0503 | |
| C | 0.5900 | 0.2850 | 0.1754 | 0.1366 | |
| 0 | 0.2971 | 0.3277 | 0.2822 | ||
| Mahalanobis distance [24] | A | 0.4317 | 0.4276 | 0.5359 | 0.6077 |
| B | 0.0020 | 0.0535 | 0.0427 | 0.0442 | |
| C | 0.2841 | 0.2555 | 0.1884 | 0.1606 | |
| 0.2822 | 0.2634 | 0.2330 | 0.1875 | ||
| Proposed | A | 0.5171 | 0.6036 | 0.8753 | 0.9206 |
| B | 0 | 0.0068 | 0.0105 | 0.0081 | |
| C | 0.4829 | 0.3896 | 0.1142 | 0.0713 | |
| 0 | 0 | 0 | 0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, F.; Chen, J.; Li, Y. Improvement of DS Evidence Theory for Multi-Sensor Conflicting Information. Symmetry 2017, 9, 69. https://doi.org/10.3390/sym9050069
Ye F, Chen J, Li Y. Improvement of DS Evidence Theory for Multi-Sensor Conflicting Information. Symmetry. 2017; 9(5):69. https://doi.org/10.3390/sym9050069
Chicago/Turabian StyleYe, Fang, Jie Chen, and Yibing Li. 2017. "Improvement of DS Evidence Theory for Multi-Sensor Conflicting Information" Symmetry 9, no. 5: 69. https://doi.org/10.3390/sym9050069
APA StyleYe, F., Chen, J., & Li, Y. (2017). Improvement of DS Evidence Theory for Multi-Sensor Conflicting Information. Symmetry, 9(5), 69. https://doi.org/10.3390/sym9050069