Additionally, the Fourier-based enhancements in BSAA are inspired by frequency-domain decomposition methods discussed in prior studies like Fedformer [
16], which demonstrated the effectiveness of integrating spectral analysis to model cyclical patterns in data. On the other hand, the SPSA mechanism leverages concepts from multi-scale decomposition and aggregation as outlined in classical time-series techniques, including wavelet analysis [
35], and recent innovations such as the auto-correlation approach in Autoformer [
12]. These references collectively underscore the importance of combining temporal and frequency-domain insights to address the challenges of predicting complex marine shaft trajectories. By synergizing these methodologies, BSAA and SPSA ensure robust handling of both short-term fluctuations and long-term dependencies, thereby advancing the state of the art in Transformer-based time-series forecasting.
3.1. Model Architecture
Accurately predicting ship main shaft centerline trajectories requires an effective approach to multivariate time-series forecasting, particularly in deciphering and leveraging critical signals to anticipate future trends. Each variable involved in the prediction process, such as lateral and longitudinal displacement, environmental conditions, and operational factors, plays a distinct role in shaping the trajectory forecast. A heatmap, shown in
Figure 2, highlights the correlation patterns between each variable and the target forecast. These correlations are dynamic, shifting over time due to the complex interactions between mechanical and environmental factors. Capturing these temporal shifts is essential for enhancing the model’s predictive performance. Moreover, identifying and analyzing the interdependencies between these variables is crucial for improving prediction accuracy. The dynamic interplay between multiple variables adds depth to the analysis, enabling the model to better account for both short-term variations and long-term trends in the data. By incorporating these interdependencies into the proposed model, we significantly enhance its ability to produce more accurate and reliable forecasts. As detailed in the architectural diagram of the model (
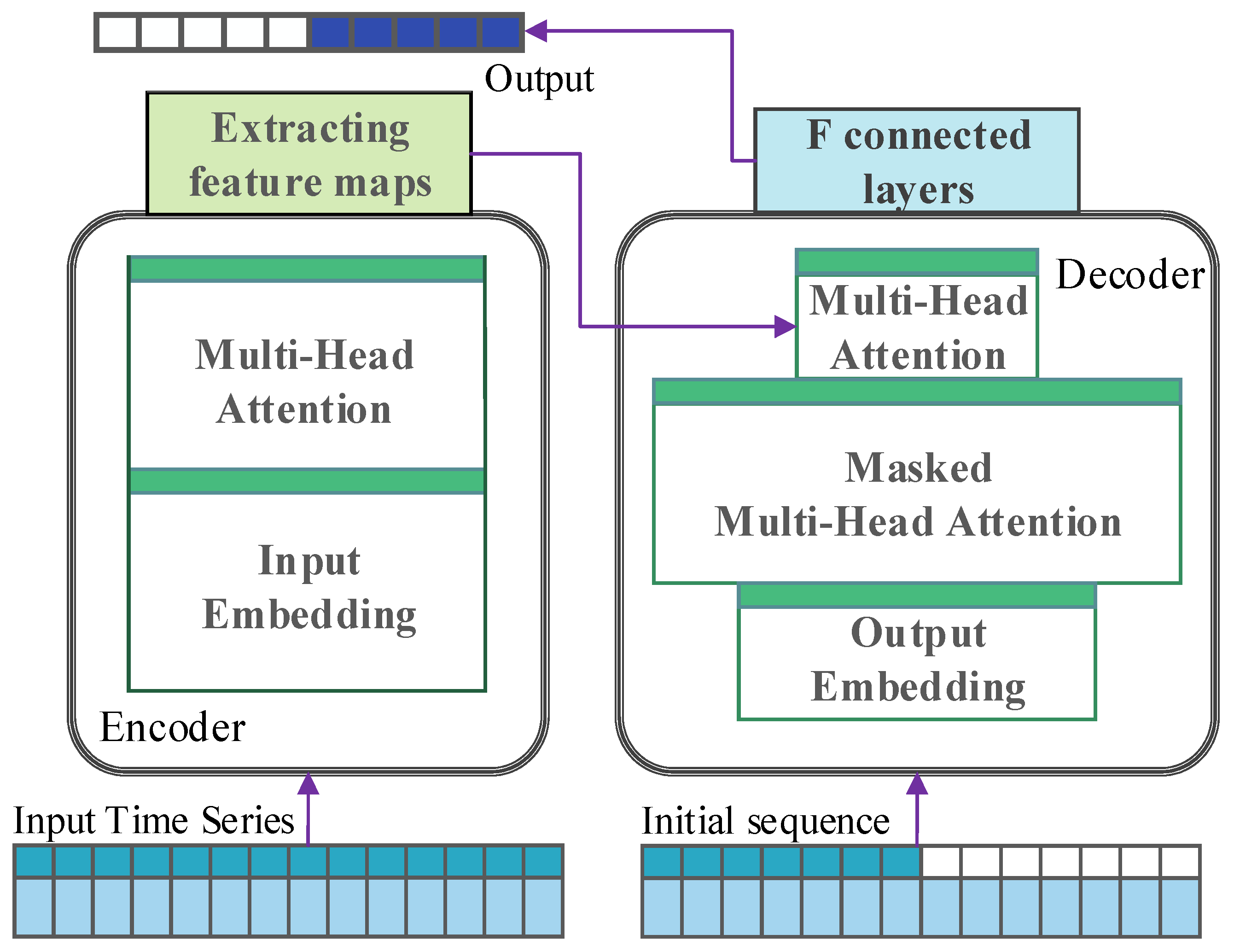
Figure 3), this study focuses on improving the model’s handling of complex temporal patterns, particularly those involving seasonal variations and trend-cyclical behaviors, to ensure robust long-term forecasting of the ship’s main shaft centerline trajectory. The key structural enhancements in this model are specifically designed to optimize its capacity for interpreting intricate temporal data in maritime applications.
Figure 3 illustrates the architecture of the proposed BSAA algorithm model, highlighting the critical components and their roles in data processing. The workflow can be described in the following steps:
- (1)
Input Embedding: The raw input time-series data (e.g., ship displacement signals) are first transformed into a high-dimensional feature space using an embedding layer. This step ensures the raw data are represented in a format suitable for downstream processing.
- (2)
Encoder Processing:
- (1)
Bidirectional Splitting–Agg Attention (BSAA): The encoder applies the BSAA mechanism to capture both past (backward attention) and future (forward attention) dependencies using a frequency-domain analysis.
- (2)
Split Sequence and Convolution: The time-series data are then split into smaller temporal units and processed using sequential convolution operations. This step enhances feature extraction by isolating finer temporal components.
- (3)
Feed-Forward Layer: Aggregates and refines the extracted features from the previous stages. These steps are repeated across multiple encoder blocks (N) to progressively improve the model’s ability to capture complex temporal patterns.
- (3)
Decoder Initialization: The output of the encoder is split into two distinct components:
- (1)
Seasonal Component: Captures periodic or cyclical patterns, such as vibrations or oscillations, in the ship’s shaft movement.
- (2)
Trend Component: Represents long-term variations, such as changes in shaft displacement due to mechanical wear or external factors.
From a practical perspective, we consider the following:
Seasonal Component: Represents recurring mechanical patterns in the ship’s shaft system, such as vibrations induced by propulsion systems or regular operational maneuvers. For instance, during steady cruising, the propulsion shaft experiences consistent periodic oscillations, which are captured as seasonal variations.
Trend Component: Reflects long-term structural changes or operational shifts, such as gradual displacement caused by wear and tear in the mechanical system, or environmental factors like sea state and weather conditions.
- (4)
Decoder Processing: The seasonal and trend components pass through separate BSAA mechanisms to further enhance their representations. Split Sequence and ADD Blocks are refined iteratively through multiple decoder layers (M), ensuring the precise modeling of both cyclical and long-term trends.
In the decoder, the seasonal component is passed through the BSAA mechanism to focus on high-frequency periodic patterns, effectively capturing the short-term cyclical variations critical for understanding mechanical vibrations. The trend component undergoes a smoothing and aggregation process through the BSAA mechanism to highlight long-term patterns and remove noise, ensuring the model captures gradual shifts caused by operational changes or environmental factors. By refining these two components separately and iteratively, the decoder achieves a precise balance between short-term responsiveness and long-term stability in its predictions.
- (5)
Prediction Output: The refined seasonal and trend components are combined to generate the final prediction, which accurately captures both short-term fluctuations and long-term dependencies in the time-series data.
This modular architecture ensures the model is highly effective in modeling complex temporal patterns, enabling robust predictions of the ship’s main shaft trajectory. Each step in the workflow is carefully designed to optimize both computational efficiency and predictive accuracy, making the model suitable for real-world applications.
In the model architecture, the input to the encoder consists of the sequence
, where
denotes the time steps and
represents the feature dimension. This sequence includes past time steps that encode historical data related to the ship’s displacement and other influencing factors. The input to the decoder, however, is split into two distinct components: the seasonal component
and the trend-cyclical component
. These two components are extracted from the latter half of the encoder input and initialized using placeholders that account for both recent data and future trends. This process ensures that the model maintains sensitivity to recent information while providing a stable baseline for long-term forecasting. The mathematical representation of this process is as follows: Let the encoder input be
. Then, the initialization process for the seasonal part
and the trend-cyclical part
of the decoder can be represented as
where
represent the seasonal and trend-cyclical parts of
, respectively;
represent placeholders filled with zeros and the mean of
, respectively; and
is the length of the placeholder. This design allows the model to be more responsive to recent data while also providing a more stable foundation for predicting future trends. By separating and processing the seasonal and trend-cyclical components in this manner, the architecture ensures that the model can efficiently handle the temporal variability inherent in ship main shaft trajectories.
Within the architecture, the encoder is tasked with modeling seasonal patterns in the data. The output of the encoder encapsulates past seasonal information, which is then utilized as cross-information to assist the decoder in refining prediction outcomes. This design is especially beneficial for capturing seasonal variations that frequently occur in time-series data related to ship movements, such as periodic fluctuations caused by mechanical vibrations or regular operational patterns. Summarizing the overall expression for the l-th layer of the encoder, let
be the output of the l-th layer, and
be the output of the (l-1)-th layer, as seen in the following formula:
This multi-layer design allows the model to progressively extract more complex temporal features as data move through each layer, improving the model’s ability to capture both short-term fluctuations and long-term trends in the ship main shaft’s trajectory. In the formula, EncLayer represents the operation of the encoder layer. For each layer of the encoder, its internal processing can be detailed as follows:
where Bidirectional-Splitting-Agg represents the BSAA mechanism, FFN refers to the Feed-Forward Neural Network, and Sequence Splitting corresponds to the Sequence Progressive Split–Agg operation. Specifically,
denotes the seasonal component of the l-th layer encoder after the i-th splitting block. The detailed implementation of the Bidirectional Splitting–Agg mechanism, which serves as a replacement for the traditional self-attention mechanism, will be described in the following section. This enhanced encoder architecture, which incorporates both frequency-domain Sequence Progressive Split–Agg operations and an advanced attention mechanism, empowers the model to more effectively capture and process seasonal variations in time-series data, specifically tailored to the dynamic behavior of ship shaft centerline displacement.
The decoder plays a critical role, comprising two key components: the accumulative structure for the trend-cyclical component and the enhanced BSAA mechanism designed for the seasonal component. Each decoder layer is constructed with both an improved internal BSA attention mechanism and the BSAA, facilitating communication between the encoder and decoder. This dual attention structure effectively refines predictions by leveraging historical seasonal data and extracting emerging trends and patterns from intermediate hidden variables. By focusing on cyclical dependencies, the decoder minimizes noise interference and hones in on crucial periodic trends. Structured in ’M’ layers, the decoder processes input from the encoder. For instance, considering a latent variable X1 received from the encoder, the operational dynamics of the l-th layer in the decoder can be articulated, focusing on the progressive refinement of trend predictions and the nuanced extraction of seasonal features. This layer-wise bidirectional approach allows the model to efficiently decompose and utilize complex time-series data, improving both prediction accuracy and the interpretability of forecasts. The process is mathematically expressed as
where
DecLayer represents the operation of the decoder layer. The internal processing of each decoder layer can be described as
where
is the trend-cyclical component accumulated by the
l-th layer decoder;
, respectively, represent the seasonal component and trend-cyclical component after the
i-th splitting block of the
l-th layer decoder; and
is the projector of the
i-th extracted trend
. The final prediction result is the sum of these two split components, which can be represented as
where
is the weight matrix used to project the deeply transformed seasonal component
onto the target dimension. These enhancements allow the decoder to more effectively process both trend-cyclical and seasonal information, significantly improving the model’s accuracy in long-term time-series forecasting, particularly for predicting ship main shaft centerline trajectories.
To handle the complexities inherent in long-term forecasting, especially in maritime applications, the model adopts a Sequence Progressive Split–Agg strategy. This block progressively distills stable long-term trends from intermediate hidden variables, allowing for a more precise analysis of the time series. By mitigating cyclical noise through a moving average approach, the model highlights persistent trends, leading to improved projection accuracy and reliability in forecasting future sequences. For any given input sequence with length L, this splitting and smoothing operation can be mathematically delineated as
where
and
represent the trend-cyclical and seasonal parts, respectively, separated from the original sequence
. This methodology enhances the predictive accuracy by isolating these components, thereby improving the model’s ability to capture and predict distinct patterns in the time series. A correlational pooling method is employed during the moving average process, and padding operations ensure that the sequence length remains unchanged. The bidirectional nature of the Splitting–Agg Attention mechanism introduces symmetry in the temporal processing of sequence data. By analyzing both past and future states, the model captures symmetrical patterns in the temporal structure, leading to more accurate and stable predictions, particularly for complex systems such as marine shafts that exhibit cyclic behavior over time.
3.2. Bidirectional Splitting–Agg Attention Layer
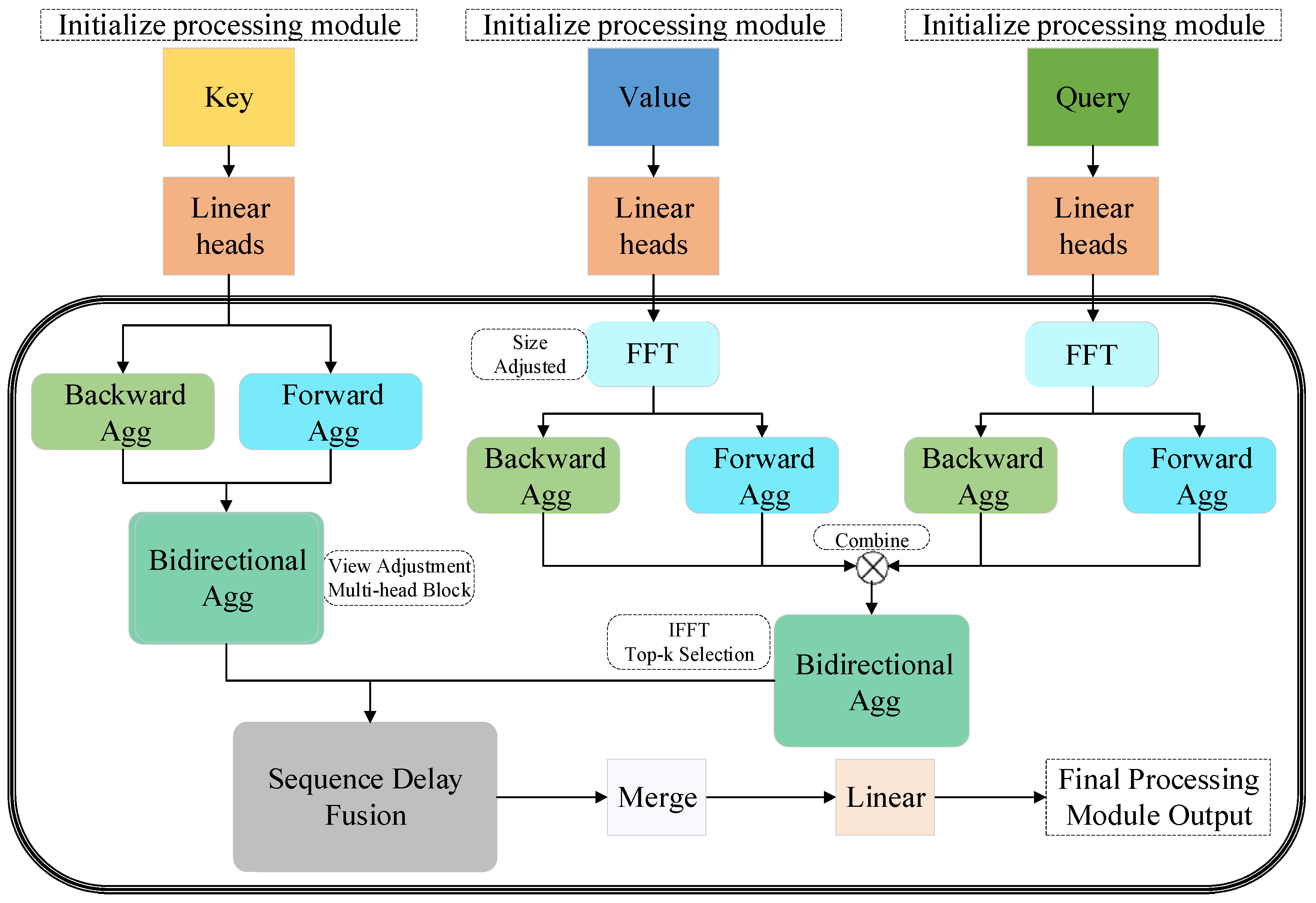
This study advances time-series data analysis by introducing a BSAA layer, as shown in
Figure 4. The BSAA layer enhances the model’s interpretative capability by processing both forward and backward temporal dependencies. This bidirectional mechanism is crucial for accurately predicting the trajectory of the ship’s main shaft, as it allows the model to capture complex cyclical and long-term dependencies inherent in the time-series data. By simultaneously calculating and aggregating attention across sub-sequences in both temporal directions, the model significantly improves its ability to understand and forecast the trajectory’s future behavior.
At the core of the BSAA layer are three distinct computational stages. The first stage involves calculating forward attention, achieved by applying a FFT to the query (
Q) and value (
V) components of the input time-series data. The FFT effectively transforms the data from the time domain into the frequency domain, enabling the model to detect periodic behaviors and cyclical patterns more efficiently. This frequency-domain processing is particularly suited for identifying long-term trends and seasonal variations within the ship’s shaft movement data. The computation for forward attention can be expressed as
Here, and are specifically arranged query and value matrices, adapted for FFT operations. represents forward correlation. In the proposed model, the initial step transitions time-series data from the time domain into the frequency domain using FFT. Following this transformation, the FFT results of both components are combined and subsequently reverted using an inverse FFT to delineate forward correlations, thereby unveiling the cyclical dependencies characteristic of the time series.
Following the forward attention computation, the model proceeds to calculate backward attention. This is achieved by reversing the sequence of the query and value components before applying FFT. This stage is essential for capturing temporal dependencies that flow from future states back to the past, a critical factor in modeling complex interactions in ship shaft trajectory data. The backward attention calculations are represented as follows:
where
and
represent the results of reversing the query and key matrices along the time axis, aiming to capture temporal dependencies from the future to the past, and
is the forward–backward correlation. This process allows the model to discern backward temporal dependencies, effectively identifying future states that influence previous time steps, which is particularly important for long-term predictive accuracy in time-series forecasting.
Post these computations, the results derived from both forward and backward attention processes are synthesized. The fusion of these directional attentions is executed using a specific formula designed to amalgamate insights from both the past and the future of the series. The resultant aggregated output, denoted as R, is formulated as
where
and
are the weight coefficients for forward and backward attention, used to adjust the impact of attention in both directions on the final output. Through this BSAA mechanism, the model can more comprehensively capture the forward and backward dependencies in time series, thus providing a more accurate perspective for long-term time series prediction. By leveraging the BSAA mechanism, the model effectively captures the complex interactions between cyclical dependencies and long-term trends in ship shaft trajectory data. This approach enhances the model’s capacity for long-term forecasting by providing a more comprehensive understanding of the temporal structure, which is essential for accurate predictions of the ship’s main shaft centerline trajectory.
3.3. Exploration of Periodic Dependence and Aggregation Mechanism
Identifying these periodic dependencies is crucial for enhancing prediction accuracy, as ship operations often exhibit recurring patterns influenced by mechanical vibrations, operational conditions, and environmental factors. In
Figure 5, building on the foundations of models such as Autoformer, this research refines the process of identifying and utilizing these cyclical variations through an advanced delayed split–aggregate analysis.
At the core of this approach is the calculation of the BSAA function, denoted as
, which provides a robust mechanism for recognizing and leveraging cyclical dependencies. This function captures the similarity between a sequence
and itself over a lag
, identifying repeating patterns within the data that play a critical role in the trajectory prediction task. The correlation function is mathematically defined as
where
captures the similarity of the sequence
with its time series in an
-step delay. This BSAA function
is used as the basis for assessing the period length
N. From a set of candidate period lengths, the k most likely period lengths
are selected.
Using the insights gained from the periodic correlation function, this study further develops a method to balance forward and backward temporal dependencies through BSAA values across the selected period lengths. This mechanism allows the model to better discern and capture long-term cyclical dependencies that are often observed in ship shaft trajectory data, thus improving the accuracy of long-term forecasts. We enhanced the Time-Delayed Aggregation (TDA) mechanism, as illustrated in
Figure 5. The Sequence Progressive Split–Agg Mechanism capitalizes on the temporal dependencies of the series, aligning and connecting subsequences within each cycle more effectively than traditional pointwise aggregations found in self-attention mechanisms. It determines the alignment of similar subsequences by leveraging selected parameters
, ensuring coherence within the estimated periods. Prior to aggregation, the importance of each subsequence is ascertained via an optimized SoftMax function, which takes into account not only the BSAA function values but also additional cyclical influences.
For the case of a single attention head, in the original time series, with the query
Q, key
K, and value
V as preconditions, the time-delayed aggregation operation is defined as follows:
Here, represents the BSAA function for query and key . As indicated by the mathematical expression, the function argTop(k) selects the top k values of the aggregate function, where c is a hyperparameter. The time-delayed aggregation mechanism includes aggregating the time series X forward and backward based on these parameters with the For-Back-Agg operation. In this operation, elements moved beyond the first position are reintroduced at the end of the series, where and are from the encoder , adjusted to length , and is from the previous block of the decoder.
To fully utilize the multi-head attention mechanism, a multi-head version is introduced to process hidden variables, which have
channels and are distributed across
h different heads. For the
in the i-th head, the range is
. This multi-head processing can be described as follows:
The above formulas use the FFT method for calculation. For the calculation of BSAA function values, given the time series
,
is calculated using FFT. Let
be the signal in the frequency domain; then, the calculation can be represented as
where
represents FFT, and
is its conjugate operation.
is in the frequency domain. Then,
can be calculated through an inverse FFT operation:
where
represents different time delays, and
L is the length of the sequence. The model can quickly and accurately process long-term time-series data, especially when dealing with data characterized by significant cyclicity and seasonality. Through this method, the model’s performance is not only enhanced, but also the demand for computational resources is reduced, making the model more suitable for large-scale time-series forecasting tasks.
Our approach allows the model to efficiently process long-term time-series data, even in cases where significant periodicity and seasonality are present. By leveraging FFT and inverse FFT, the model can quickly detect and utilize periodic structures in the data, enhancing both its accuracy and computational efficiency. The ability to capture and process these long-term cyclical patterns makes the model particularly well suited for large-scale forecasting tasks such as predicting ship main shaft centerline trajectories.
3.4. Model Analysis
Within the proposed model framework, this study introduces a novel BSAA mechanism specifically designed to enhance the model’s capacity to capture both forward and backward temporal dependencies. Unlike traditional self-attention models, which primarily focus on current and past data, the BSAA mechanism offers a comprehensive, bidirectional analysis of time-series data. This approach is critical in accurately predicting the trajectory of the ship’s main shaft centerline, as it captures dynamic shifts and recurring cyclical patterns that may occur in both past and future time steps.
The BSAA mechanism operates by utilizing FFT in a bidirectional manner, transforming the input data into the frequency domain. By doing so, the model can detect and capitalize on key cyclical patterns and reverse temporal dependencies that are often difficult to discern using standard time-domain techniques. FFT allows the BSAA mechanism to efficiently handle complex frequency components within the displacement data, revealing long-term trends, periodic behaviors, and latent cyclical patterns that are critical for predicting ship shaft trajectories over extended periods. For instance, consider a univariate time-series input sequence
, representing the lateral displacement of a ship’s main shaft. The BSAA mechanism first splits the sequence into two sub-sequences: a forward sequence
and a backward sequence
. The FFT is applied separately to each sequence, transforming them into the frequency domain as
. This transformation captures periodic components and frequency-domain dependencies. The next step involves computing forward and backward attention weights using these transformed sequences. For example, forward attention identifies dependencies in
, such as the relationship between shaft displacements at
and
, where k denotes a periodic delay. Similarly, backward attention weights capture dependencies in
, such as the influence of future displacements on previous states. After computing forward and backward correlations, the results are combined using a weighted aggregation function:
where
and
are learned parameters that balance the contributions of forward and backward attention. This aggregated result
represents the refined temporal dependencies that the model uses for downstream predictions. Through this process, the BSAA mechanism effectively identifies and integrates cyclical patterns, making it well suited for time-series data with pronounced periodicity, such as ship shaft trajectories.
The key strength of the BSAA mechanism lies in its ability to integrate insights from both forward and backward attention analyses. This bidirectional approach enables the model to develop a more complete understanding of the temporal structure within the data, leading to improved predictive precision. By leveraging forward attention, the model captures the historical influences on current shaft movements, while backward attention identifies potential future impacts on past behaviors, enabling more accurate and robust predictions.
Through the segmentation and aggregation of these temporal insights, the BSAA mechanism systematically identifies and capitalizes on periodic dependencies between subsequences. This segmentation process isolates important periodic features, allowing the model to focus on the most relevant temporal patterns. The segmentation of the input data into seasonal and trend-cyclical components has significant practical implications. The seasonal component helps identify consistent periodic behaviors, which are critical for monitoring routine mechanical vibrations and propulsion system operations. The trend-cyclical component, on the other hand, provides insights into long-term structural changes in the shaft system, such as those caused by wear and tear or environmental conditions. Together, these components provide a comprehensive understanding of the temporal dynamics, enabling the precise predictions of both recurring patterns and long-term shifts in the data. By incorporating these practical examples, we demonstrate how the BSAA and SPSA mechanisms operate in real-world scenarios, effectively capturing both short-term and long-term dependencies. This ensures that the proposed model is well equipped to address the challenges inherent in complex time-series forecasting tasks, such as predicting ship main shaft trajectories. The aggregation phase then combines these insights across different time periods, effectively aligning similar subsequences and improving the overall representation of the data. This method of segmenting and aggregating time-series data enables the model to handle long-term dependencies more effectively, providing a clearer view of how cyclic patterns influence future trajectories.
BSAA equips the model with a holistic understanding of sequence data by considering both preceding (forward attention) and subsequent (backward attention) elements. As depicted in
Figure 4, this approach significantly augments the model’s contextual comprehension, thereby improving both the accuracy and efficiency of predictions. In the realm of time series analysis, it translates to an enhanced capability to discern and forecast patterns, including trends and seasonal variations. By assimilating forward and backward temporal relations, bidirectional attention substantially improves the model’s proficiency in recognizing cyclicality and trends, proving particularly beneficial in long-term forecasting and intricate seasonal pattern analysis.
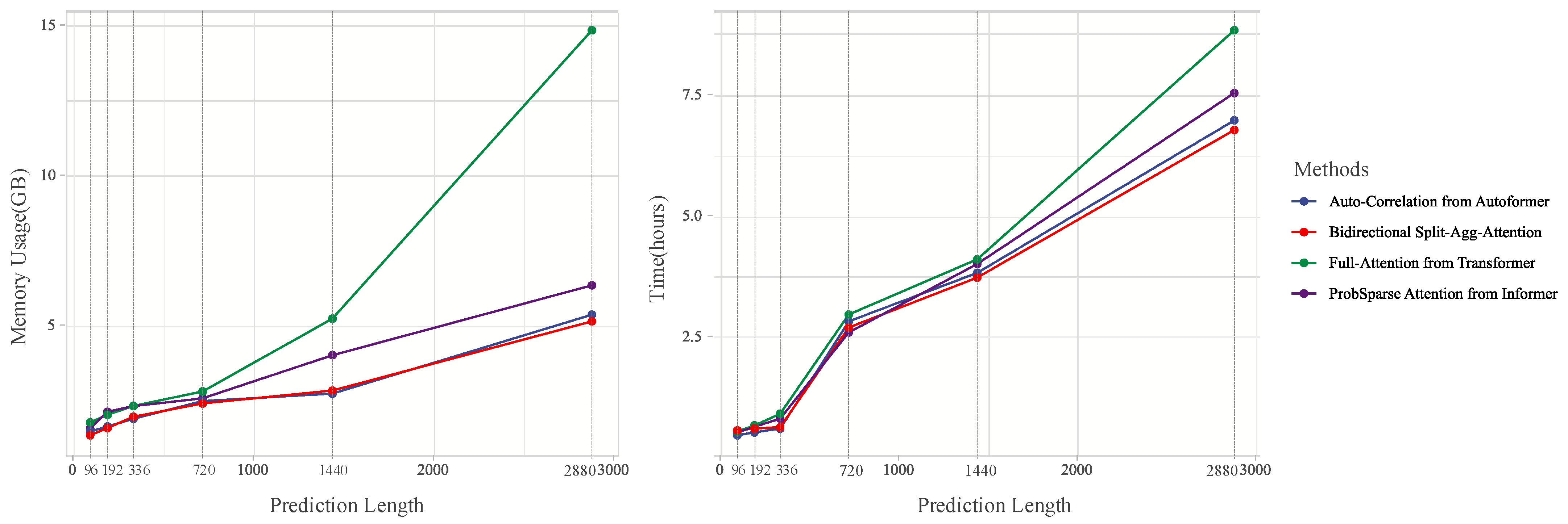
The BSAA and the SPSA module in this study notably reduce memory demands and enhance computational efficiency throughout the experimental process. Without compromising computational speed, they simultaneously refine the model’s ability to predict and delineate prominent growth trends and seasonal peaks.
Figure 6 presents a comparative analysis of memory usage and processing time across different models, including Autoformer, Informer, Transformer, and our proposed model, during the training phase. The results clearly highlight the computational efficiency of our approach:
- (1)
Memory Usage: For prediction lengths up to 720 steps, our model consumes 2.8 GB of memory, significantly lower than Transformer (4.2 GB) and comparable to Autoformer (2.7 GB) and Informer (2.9 GB). For longer prediction lengths (up to 3000 steps), our model maintains memory usage under 6 GB, while Transformer rises dramatically to 15 GB.
- (2)
Processing Time: In terms of training time, our model demonstrates consistent improvements. For shorter prediction horizons (96 and 192 steps), the training time per epoch is 0.5 h, similar to Autoformer and Informer, and faster than Transformer. For longer prediction lengths (720 to 3000 steps), our model completes training within 5 h, compared to Transformer, which exceeds 7.5 h.
The identified time delay sizes indicate probable period lengths, aiding the model in employing the BSAA function for subsequences from corresponding or proximal stages. For the final time step, the BSAA adeptly employs analogous sequences, mitigating the shortcomings observed in self-attention models. This indicates that the model is capable of more completely and accurately capturing relevant information. Comparative assessments of operational memory and time during the training phase reveal that the BSAA-equipped Transformer-based model outshines its counterparts in both memory efficiency and long-term sequence handling, affirming its superior performance.
Table 2 presents a comparison of the time and space complexities of the models explored in this study, including the proposed Transformer-based model. Unlike the standard Transformer with
time and
space complexity, our model achieves
time complexity and
space complexity. This improvement is due to the BSAA mechanism, which reduces computational load by processing sequences bidirectionally and leveraging Fourier transforms to capture periodic dependencies efficiently. While models such as Autoformer and Informer also achieve
time complexity, they face specific limitations in handling complex and dynamic time-series data. Autoformer, for instance, relies on auto-correlation mechanisms that work well for stationary or quasi-stationary data but struggle with non-stationary patterns often observed in real-world datasets like ship shaft displacement. Similarly, Informer employs sparse attention to reduce computational overhead but sacrifices accuracy when dealing with sequences that exhibit intricate temporal dependencies or strong periodic components. In contrast, traditional models like LSTM and ARIMA, though effective for short-term or stationary datasets, are inherently constrained by scalability and their inability to model long-term, non-linear dynamics. For example, LSTM’s
time complexity makes it computationally prohibitive for large-scale datasets, while ARIMA’s reliance on stationary assumptions limits its applicability to real-world scenarios with varying operational conditions. The proposed Transformer-based model overcomes these limitations by combining the BSAA and SPSA mechanisms, which are specifically designed to capture both bidirectional dependencies and complex periodic behaviors. This unique architecture ensures robustness and efficiency, making it better suited for real-world applications where long-term forecasting accuracy and computational scalability are critical.
Compared to other Transformer variants like Autoformer and Informer, which offer O(LlogL) time complexity, the proposed model provides superior performance in scenarios with non-stationary and long-range dependencies. Traditional models like LSTM and ARIMA face challenges in handling such data effectively, either due to scalability issues or limitations with non-linear dynamics. The SPSA module in our model further optimizes memory usage by splitting and aggregating sequences progressively, ensuring the model remains both computationally efficient and accurate, particularly for long-term trajectory prediction in maritime applications.
The BSAA mechanism’s ability to sparsely represent and aggregate temporal data is a key contributor to the model’s superior accuracy and operational efficiency in long-term sequence forecasting. By integrating forward and backward temporal dependencies, and efficiently processing cyclical patterns, the BSAA mechanism empowers the model to provide highly accurate predictions of the ship’s main shaft centerline trajectory, even in challenging maritime environments characterized by complex temporal dynamics.
3.5. Implementation Framework for Model Construction and Training
To ensure the reproducibility of our model, we provide a comprehensive explanation of the primary components and configurations. The proposed Transformer-based model is designed to predict time-series data by leveraging our custom BSAA mechanism and SPSA module. These modules enable the model to capture both short-term fluctuations and long-term dependencies within the data, providing accurate predictions across multiple forecasting horizons.
The model begins with an embedding layer that converts the input time series into a high-dimensional space, capturing temporal features without relying on positional encoding. This design choice enables the model to process time-series data flexibly, focusing on content rather than position. The embedded data is then processed by the SPSA module, which performs seasonal and trend decomposition. This module decomposes the input sequence into seasonal and trend components through a custom moving average approach, helping the model isolate regular cyclic patterns from underlying trends. Implementing the SPSA module requires specifying parameters like the moving average window, which can be adjusted based on the dataset’s periodicity and trend characteristics. Within the encoder, the model uses the BSAA mechanism instead of the traditional self-attention mechanism. BSAA is designed specifically for time-series data, as it applies attention in both forward and backward directions, capturing temporal dependencies across multiple time scales. This bidirectional structure allows the model to understand dependencies from both past and future states, making it especially effective for complex time series with cyclical patterns. In the code, the BSAA module replaces conventional self-attention layers, with parameters tuned to optimize performance.
In the decoder, the model reconstructs the forecasted time series by combining outputs from the BSAA-encoded seasonal and trend components. The decoder utilizes cross-attention to align the seasonal and trend components, ensuring that short-term variations and long-term patterns are accurately represented in the final forecast. Additionally, the decoder incorporates the SPSA results, effectively merging short-term fluctuations with long-term trends to improve accuracy across different forecast horizons. During training, we employ the Adam optimizer with a learning rate scheduler, aiming for optimal convergence without overfitting.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}