
The Local Convergence of a Three-Step Sixth-Order Iterative Approach with the Basin of Attraction


Abstract
1. Introduction
2. Proposed Iterative Method and Convergence Analysis
3. Local Convergence
Uniqueness
4. Numerical Example
- Operating system: Microsoft Windows 11;
- System manufacturer: HP;
- Processor: 11th generation intel(R) core i3;
- RAM: 8 GB;
- System type: 64-bit operating system.
- The number of iterations.
- The approximated root.
- The functional value corresponding to the zero.
- The absolute difference between the consecutive iterations
- The computational order of convergence (COC).
- The CPU time is the execution time for the computational operations by using the Mathematica 11.3
Application to Real-Life Problems
- v = the volume of the spherical tank.
- h = the depth of water in the tank.
- R = the radius of the tank.
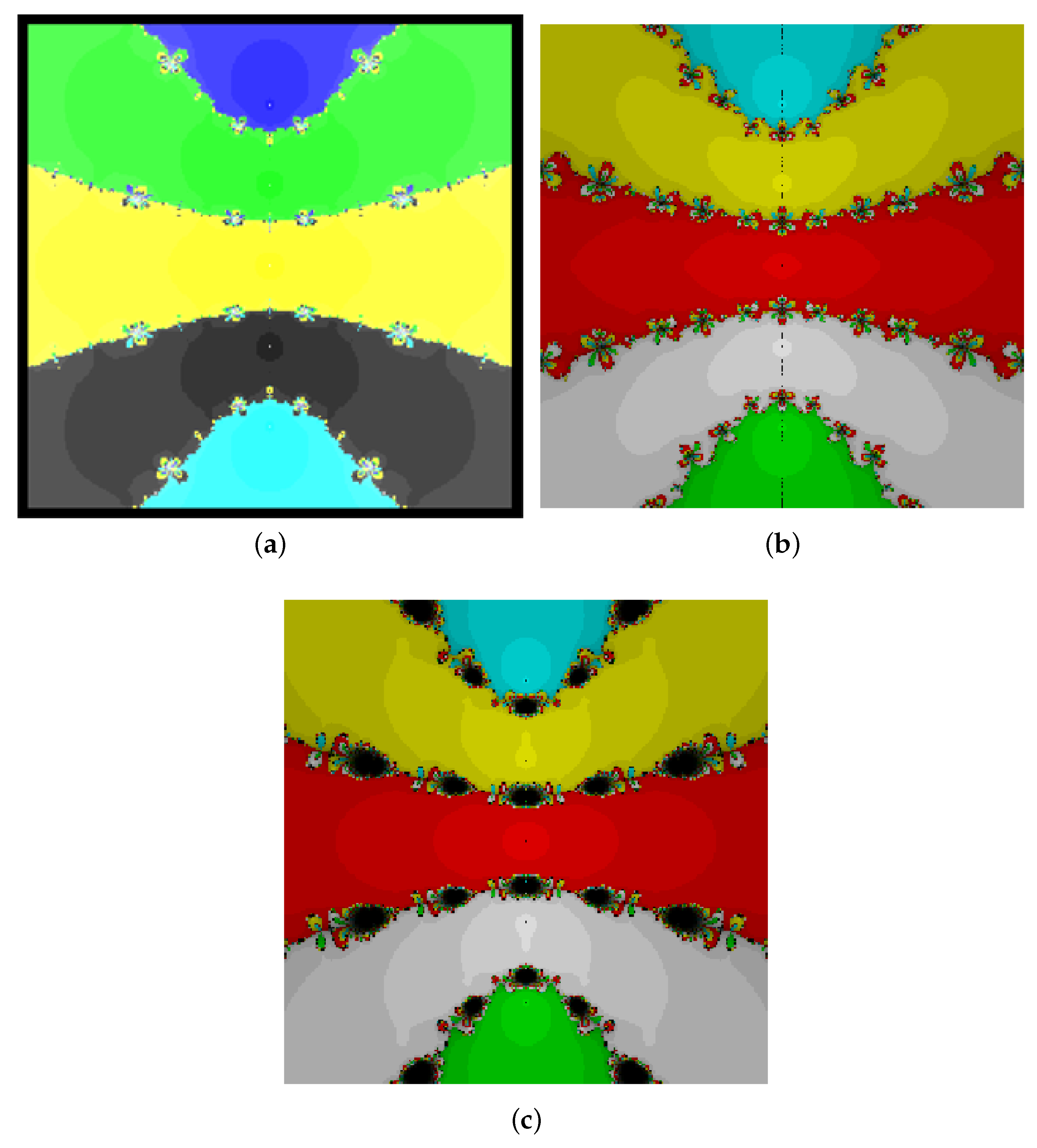
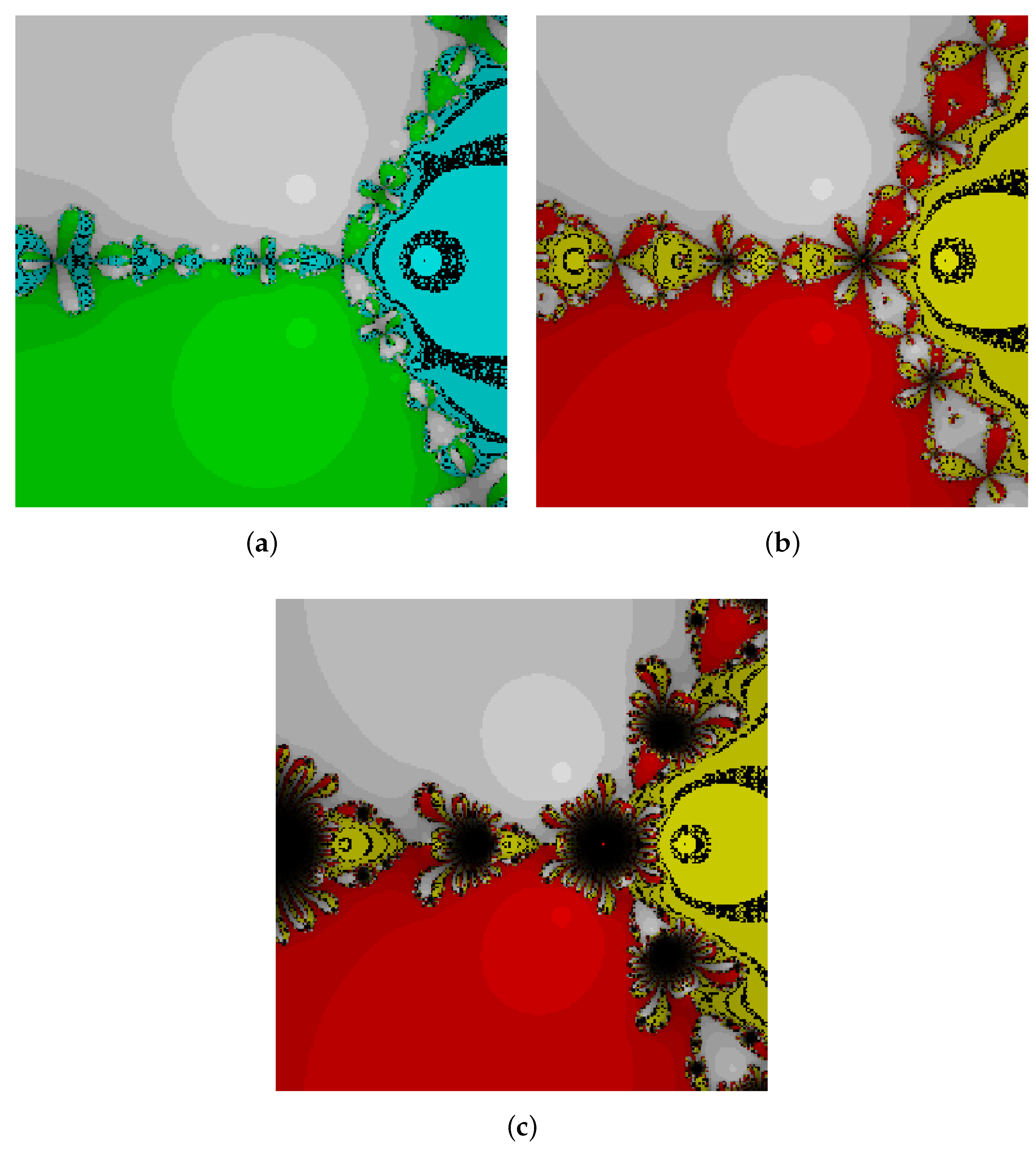
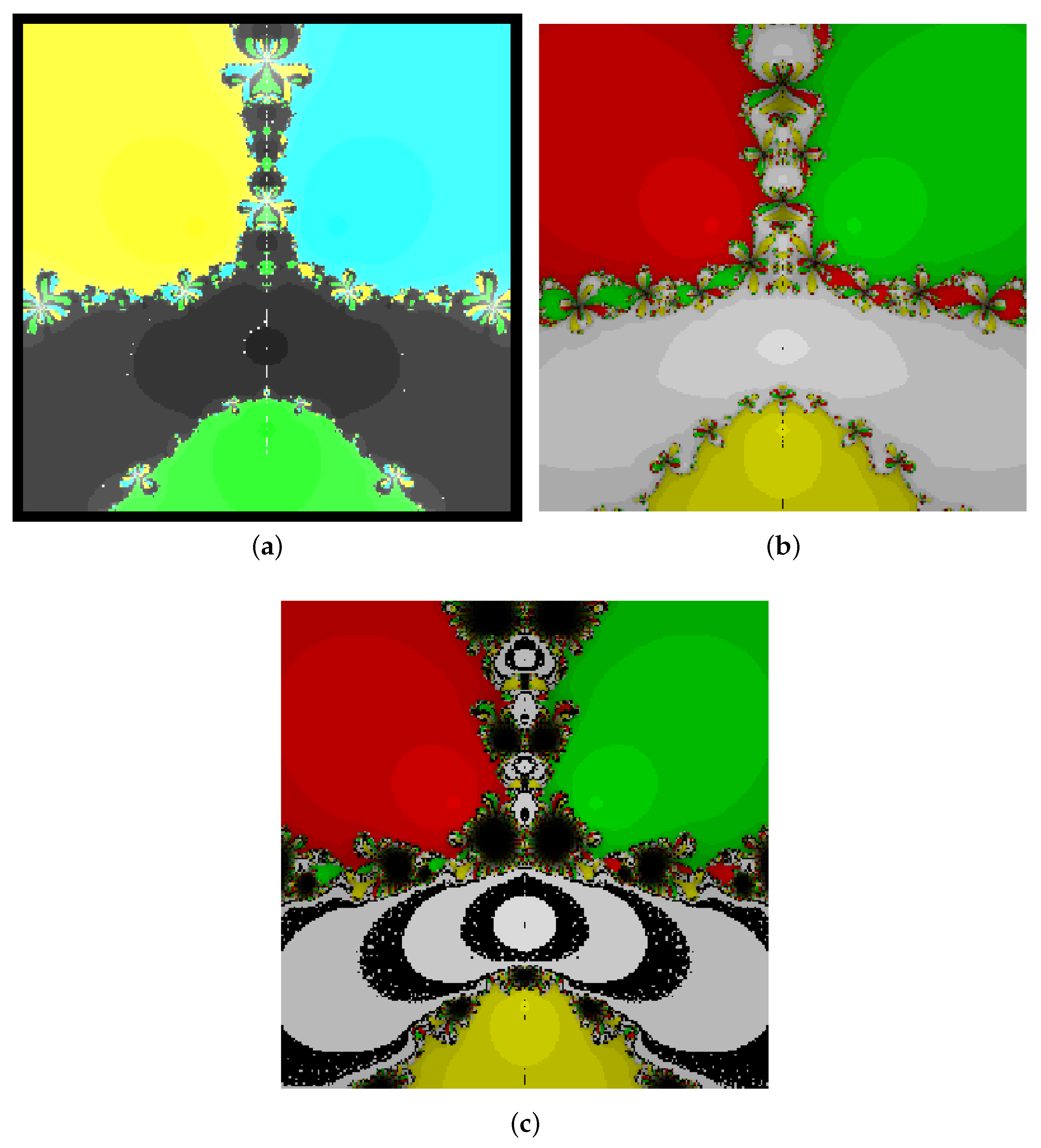
5. Basin of Attraction
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Solaiman, S.O.; Sihwail, R.; Shehadeh, H.; Hashim, I.; Alieyan, K. Hybrid Newton–Sperm Swarm Optimization Algorithm for Nonlinear Systems. Mathematics 2023, 11, 1473. [Google Scholar] [CrossRef]
- Singh, S.; Gupta, D.K. Iterative methods of higher order for nonlinear equations. Vietnam. J. Math. 2016, 44, 387–398. [Google Scholar] [CrossRef]
- Grau, M.; Díaz-Barrero, J.L. An improvement of the Euler—Chebyshev iterative method. J. Math. Anal. Appl. 2006, 315, 1–7. [Google Scholar] [CrossRef]
- Babajee, D.K.R.; Dauhoo, M.Z.; Darvishi, M.T.; Karami, A.; Barati, A. Analysis of two Chebyshev-like third order methods free from second derivatives for solving systems of nonlinear equations. J. Comput. Appl. Math. 2010, 233, 2002–2012. [Google Scholar] [CrossRef]
- Darvishi, M.T.; Barati, A. A third-order Newton-type method to solve systems of nonlinear equations. Appl. Math. Comput. 2007, 187, 630–635. [Google Scholar] [CrossRef]
- Behl, R.; Maroju, P.; Motsa, S.S. A family of second derivative free fourth order continuation method for solving nonlinear equations. J. Comput. Appl. Math. 2017, 318, 38–46. [Google Scholar] [CrossRef]
- Maheshwari, A.K. A fourth order iterative method for solving nonlinear equations. Appl. Math. Comput. 2009, 211, 383–391. [Google Scholar] [CrossRef]
- Khirallah, M.Q.; Alkhomsan, A.M. A new fifth-order iterative method for solving non-linear equations using weight function technique and the basins of attraction. J. Math. Comput. Sci. 2023, 28, 281–293. [Google Scholar] [CrossRef]
- Abdul-Hassan, N.Y.; Ali, A.H.; Park, C. A new fifth-order iterative method free from second derivative for solving nonlinear equations. J. Appl. Math. Comput. 2022, 68, 2877–2886. [Google Scholar] [CrossRef]
- Cordero, A.; Ezquerro, J.A.; Hernández-Verón, M.A.; Torregrosa, J.R. On the local convergence of a fifth-order iterative method in Banach spaces. Appl. Math. Comput. 2015, 251, 396–403. [Google Scholar] [CrossRef]
- Argyros, I.K.; Khattri, S.K. Local convergence for a family of third order methods in Banach spaces. Punjab Univ. J. Math. 2020, 46, 52–63. [Google Scholar]
- Solaiman, S.O.; Hashim, I. Efficacy of optimal methods for nonlinear equations with chemical engineering applications. Math. Probl. Eng. 2019, 2019, 1728965. [Google Scholar]
- Argyros, I.K.; George, S. Ball convergence of a sixth order iterative method with one parameter for solving equations under weak conditions. Calcolo 2016, 53, 585–595. [Google Scholar] [CrossRef]
- Sharma, D.; Parhi, S.K. On the local convergence of higher order methods in Banach spaces. Fixed Point Theory 2021, 22, 855–870. [Google Scholar] [CrossRef]
- Chapra, S.C. Applied Numerical Methods; McGraw-Hill: Columbus, OH, USA, 2012. [Google Scholar]
- Shih, A.J.; Monteiro, M.C.; Dattila, F.; Pavesi, D.; Philips, M.; da Silva, A.H.; Vos, R.E.; Ojha, K.; Park, S.; van der Heijden, O.; et al. Water electrolysis. Nat. Rev. Methods Prim. 2022, 2, 84. [Google Scholar] [CrossRef]
- Wiersma, A.G. The Complex Dynamics of Newton’s Method. Doctoral Dissertation, Faculty of Science and Engineering, University of Southampton, Southampton, UK, 2016. [Google Scholar]
- Solaiman, O.S.; Karim, S.A.A.; Hashim, I. Dynamical Comparison of Several Third-Order Iterative Methods for Nonlinear Equations. Comput. Mater. Contin. 2021, 67, 1951–1962. [Google Scholar] [CrossRef]
- Sutherland, S. Finding Roots of Complex Polynomials with Newton’s Method. Doctoral Dissertation, Boston University, Boston, MA, USA, 1989. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | n | COC | CPU Time | |||
|---|---|---|---|---|---|---|
| PM | 1 | 2.0269 | ||||
| 2 | 2.02691 | 0 | 6 | 0.234 | ||
| IS | 1 | 1.8949 | 0.129025 | |||
| 2 | 2.02392 | 6 | 0.239 | |||
| 3 | 2.02691 | |||||
| DS | 1 | 2.02681 | 0.0000943061 | |||
| 2 | 2.02691 | 6 | 0.236 |
| Method | n | COC | CPU Time | |||
|---|---|---|---|---|---|---|
| PM | 1 | 0.0283696 | ||||
| 2 | 0.0282494 | 0 | 6 | 0.140 | ||
| IS | 1 | 0.023441 | 0.0047532 | |||
| 2 | 0.0281942 | 6 | 0.14 | |||
| 3 | 0.0282494 | |||||
| DS | 1 | −0.547513 | 0.41036 | |||
| 2 | −0.137153 | 6 | 0.236 | |||
| 3 | −0.0416658 |
| Method | ||||
|---|---|---|---|---|
| PM | ||||
| IS | ||||
| DS |
| Method | ||||
|---|---|---|---|---|
| PM | ||||
| IS | ||||
| DS |
| Method | ||||
|---|---|---|---|---|
| PM | ||||
| IS | ||||
| DS |
| Method | ||||
|---|---|---|---|---|
| PM | ||||
| IS | ||||
| DS |
| Method | ||||
|---|---|---|---|---|
| PM | ||||
| IS | ||||
| DS |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Devi, K.; Maroju, P.; Martínez, E.; Behl, R. The Local Convergence of a Three-Step Sixth-Order Iterative Approach with the Basin of Attraction. Symmetry 2024, 16, 742. https://doi.org/10.3390/sym16060742
Devi K, Maroju P, Martínez E, Behl R. The Local Convergence of a Three-Step Sixth-Order Iterative Approach with the Basin of Attraction. Symmetry. 2024; 16(6):742. https://doi.org/10.3390/sym16060742
Chicago/Turabian StyleDevi, Kasmita, Prashanth Maroju, Eulalia Martínez, and Ramandeep Behl. 2024. "The Local Convergence of a Three-Step Sixth-Order Iterative Approach with the Basin of Attraction" Symmetry 16, no. 6: 742. https://doi.org/10.3390/sym16060742
APA StyleDevi, K., Maroju, P., Martínez, E., & Behl, R. (2024). The Local Convergence of a Three-Step Sixth-Order Iterative Approach with the Basin of Attraction. Symmetry, 16(6), 742. https://doi.org/10.3390/sym16060742