
Pursuit and Evasion Linear Differential Game Problems with Generalized Integral Constraints




{kind=link}
Abstract
1. Introduction
2. Preliminaries
3. Statement of the Problem
- For any admissible control of the pursuers, , the system (6) has a unique solution at
- The inequalityholds.
- i.
- ii.
- iii.
4. Main Results
4.1. Conditions That Guarantee Completion of Pursuit
- i.
- ;
- ii.
- ;
- iii.
- , for all diagonal matrices .
4.2. Conditions That Guarantee Evasion
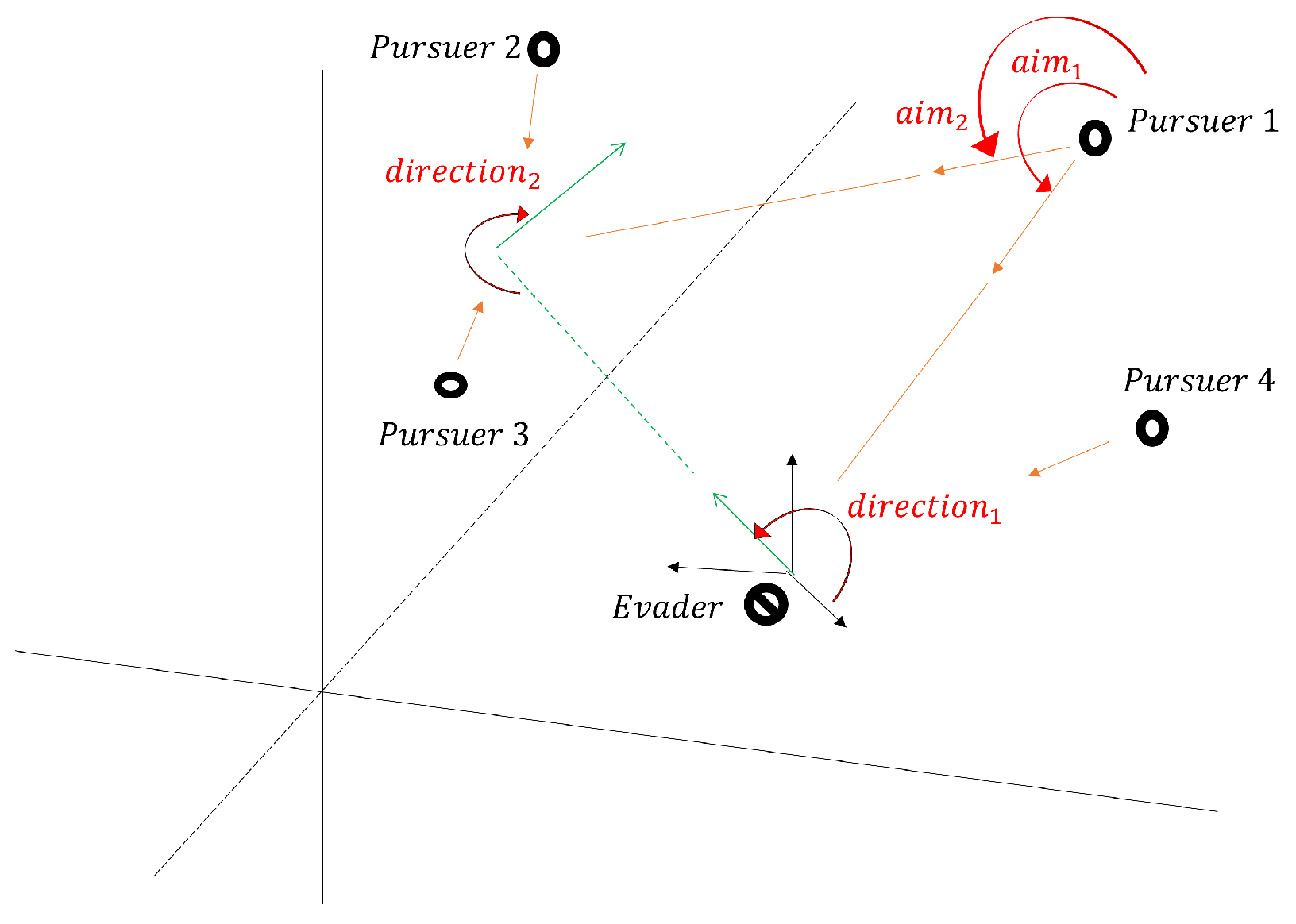
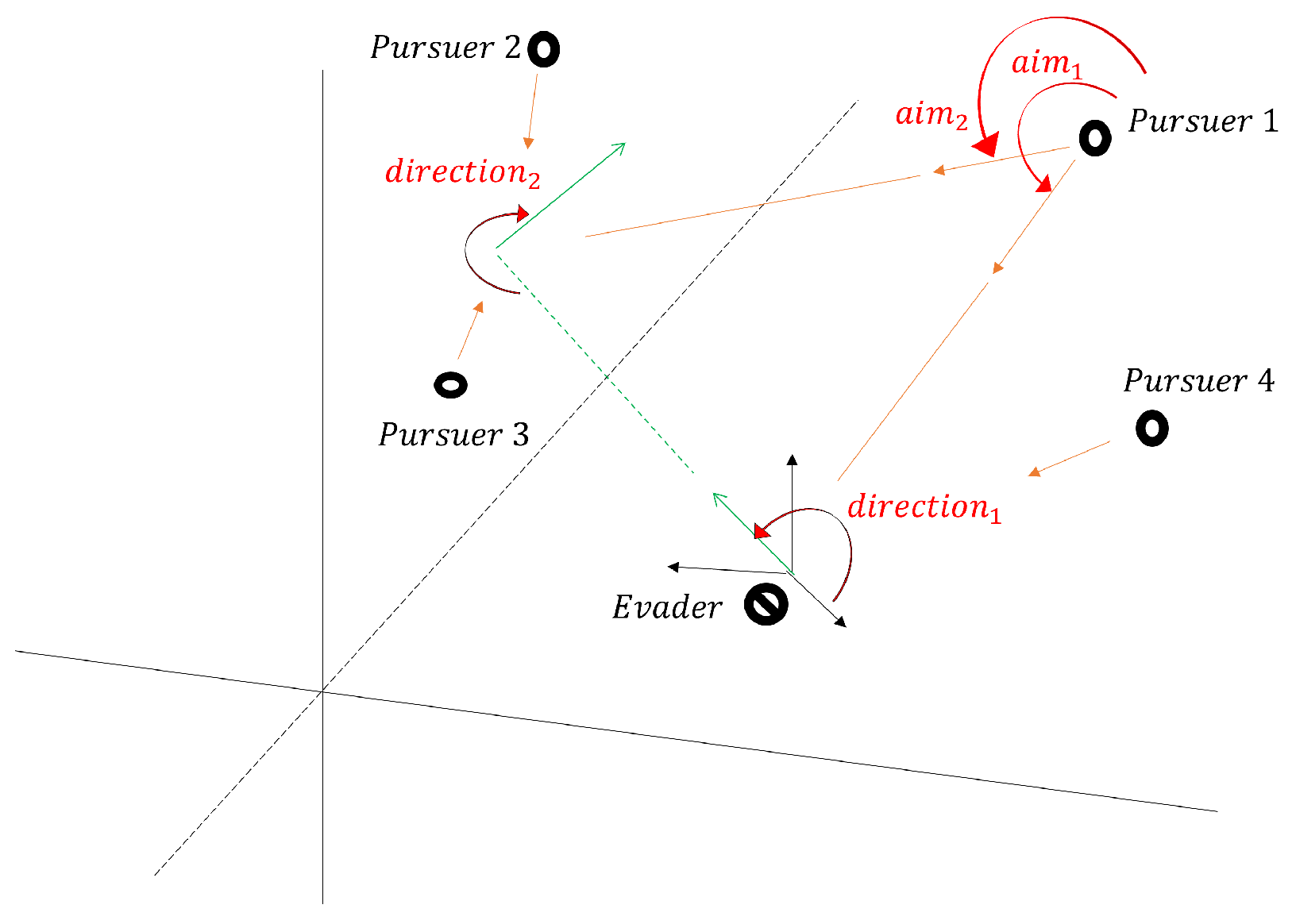
- Construction of evader’s strategyConsider the octant (that is, a coordinate axis that divides an n dimensional space into regions) in given bywhereLetbe the octant with negative coordinates. Since there are octants in the space , then there exists an octant that does not contain . Let be the octant that does not contain ; that is, is a vector in a region with at least one non-negative coordinate.Let the evader use the following strategy, , where the coordinatesfor all .According to the strategy (20), for each coordinate, the evader applies a control which allows keeping its distance on this coordinate from any of the pursuers moving in the direction of the coordinate. This is further illustrated in the space as in the Figure 1 below.Next, we show the admissibility of the strategy (20):That isHence, the strategy is admissible.
- EvasionHere, we show that evasion is possible for any given initial position of the players =, , . That is, holds for all , .Letbe the set of octants with at least one non-negative coordinate. That is, if, for instance, , then : for all and .Now consider the point , where and i is chosen in such a way that has coordinates . It is easy to see thatWe now show that evasion is guaranteed if the evader’s strategy (20) is employed. To this end, we substitute (20) in (18) and use the inequality (21) as follows:That is, , which implies , for all . Since the point is arbitrary, then it follows from Definition 6 that evasion is possible for the evader in the games (6) and (7). This completes the proof of Theorem 2.The smallest possible distance the evader can maintain from any of the m pursuers is estimated in the section below.
- Estimation of the distance of the evader from the pursuersWe already have for all and for all . Let denote the initial distance of the evader from the pursuer; thenNote that for all and for all .Since for all j, then we haveThis impliesfor all .Setfor all ; then we have , . That is, the smallest distance the evader can maintain from the pursuer is the value .
5. Illustrative Examples
5.1. Example (Pursuit Problem)
5.2. Example (Evasion Problem)
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Weintraub, I.E.; Pachter, M.; Garcia, E. An introduction to pursuit-evasion differential games. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 1049–1066. [Google Scholar]
- Pshenichnyi, B.N.; Onopchuk, Y.N. Linear differential games with integral constraints. Dokl. Akad. Nauk SSSR 1968, 1, 13–22. [Google Scholar]
- Rakhmanov, A.; Ibragimov, G.I.; Ferrara, M. Linear pursuit differential game under phase constraint on the state of evader. Discret. Dyn. Nat. Soc. 2016, 2016, 1289456. [Google Scholar] [CrossRef]
- Ibragimov, G.; Ferrara, M.; Ruziboev, M.; Pansera, B.A. Linear evasion differential game of one evader and several pursuers with integral constraints. Int. J. Game Theory 2021, 50, 729–750. [Google Scholar] [CrossRef]
- Samatov, B.T. The strategy of parallel pursuit for differential game of the first order with Gronwall-Bellman constraints. J. Eng. Sci. Technol. 2020, 2, 15–20. [Google Scholar]
- Rilwan, J.; Kumam, P.; Ibragimov, G.; Badakaya, A.J.; Ahmed, I. A differential game problem of many pursuers and one evader in the Hilbert Space l2. Differ. Equations Dyn. Syst. 2023, 31, 925–943. [Google Scholar] [CrossRef]
- Chikrii, A.A.; Aleksandr, A.B. On linear differential games with integral constraints. Trudy Inst. Mat. Mekhaniki UrO RAN 2009, 4, 290–301. [Google Scholar] [CrossRef]
- Azimov, A.Y. Linear differential pursuit game with integral constraints on the control. Differ. Uravn. 1975, 11, 1723–1731. [Google Scholar]
- Ibragimov, G.; Azamov, A.A.; Khakestari, M. Solution of a linear pursuit-evasion game with integral constraints. Anziam J. 2010, 52, E59–E75. [Google Scholar] [CrossRef]
- Ahmed, I.; Kumam, W.; Ibragimov, G.; Rilwan, J. Pursuit differential game problem with multiple players on a closed convex set with more general integral constraints. Thai J. Math. 2020, 18, 551–561. [Google Scholar]
- Ibragimov, G.; Akhmedov, A.; Izzati, P.N.; Manaf, N.A. Pursuit differential game described by infinite first order 2-systems of differential equations. Malaysian J. Math. Sci. 2017, 11, 181–190. [Google Scholar]
- Azimov, A.Y. A linear differential evasion game with integral constraints on the controls. USSR Comput. Math. Math. Phys. 1974, 14, 56–65. [Google Scholar] [CrossRef]
- Ibragimov, G.; Rikhsiev, B.B. On some sufficient conditions for optimality of the pursuit time in the differential game with multiple pursuers. Autom. Remote Control. 2006, 67, 529–537. [Google Scholar] [CrossRef]
- Ibragimov, G.; Khakestari, M.; Kuchkarov, A.S. Solution of a linear pursuit-evasion differential game with closed and convex terminal set. ITB J. Sci. 2012, 44, 1–12. [Google Scholar] [CrossRef]
- Ibragimov, G.; Rahmanov, A.; Alias, I. Construction of Strategies of Pursuers in a Differential Game of Many Players with State and Integral Constraints. In International Conference on Mathematical Sciences and Statistics 2013: Selected Papers; Springer: Singapore, 2014; pp. 37–43. [Google Scholar]
- Ibragimov, G.; Hasim, R.M. Pursuit and evasion differential games in Hilbert space. Int. Game Theory Rev. 2010, 12, 239–251. [Google Scholar] [CrossRef]
- Badakaya, A.J.; Muhammad, B. A Pursuit Differential Game Problem on a Closed Convex Subset of a Hilbert Space. J. Niger. Soc. Phys. Sci. 2020, 2, 115–119. [Google Scholar] [CrossRef]
- Badakaya, A.; Halliru, A.S.; Jamilu, A.; Ibrahim, K.A. A differential game of pursuit-evasion with constrained players’ energy. Data Anal. Appl. Math. 2022, 3, 42–51. [Google Scholar]
- Adamu, J.; Muangchoo, K.; Badakaya, A.J.; Rilwan, J. On pursuit-evasion differential game problem in a Hilbert space. AIMS Math. 2020, 5, 7467–7479. [Google Scholar] [CrossRef]
- Azimov, A.Y.; Ibragimov, G.; Ibaydullaev, T.; Alias, I.A. Optimal Number of Pursuers in Differential Games on the 1-Skeleton of an Orthoplex. Symmetry 2021, 13, 2170. [Google Scholar] [CrossRef]
- Ruziboev, M.; Ibragimov, G.; Mamayusupov, K.; Khaitmetov, A.; Pansera, B.A. On a Linear Differential Game in the Hilbert Space ℓ2. Mathematics 2023, 11, 4987. [Google Scholar] [CrossRef]
- Folland, G. Real Analysis: Modern Techniques and Applications; John and Wiley Sons: Hoboken, NJ, USA, 1984. [Google Scholar]
- Ibragimov, G.; Kuchkarov, A.S. Fixed Duration Pursuit-Evasion Differential Game with Integral Constraints. J. Phys. Conf. Ser. 2013, 435, 012017. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Umar, B.M.; Rilwan, J.; Aphane, M.; Muangchoo, K. Pursuit and Evasion Linear Differential Game Problems with Generalized Integral Constraints. Symmetry 2024, 16, 513. https://doi.org/10.3390/sym16050513
Umar BM, Rilwan J, Aphane M, Muangchoo K. Pursuit and Evasion Linear Differential Game Problems with Generalized Integral Constraints. Symmetry. 2024; 16(5):513. https://doi.org/10.3390/sym16050513
Chicago/Turabian StyleUmar, Bashir Mai, Jewaidu Rilwan, Maggie Aphane, and Kanikar Muangchoo. 2024. "Pursuit and Evasion Linear Differential Game Problems with Generalized Integral Constraints" Symmetry 16, no. 5: 513. https://doi.org/10.3390/sym16050513
APA StyleUmar, B. M., Rilwan, J., Aphane, M., & Muangchoo, K. (2024). Pursuit and Evasion Linear Differential Game Problems with Generalized Integral Constraints. Symmetry, 16(5), 513. https://doi.org/10.3390/sym16050513