Abstract
A detailed symmetry analysis is performed for a microscopic model used to describe traffic flow in two-lane motorways. The traffic flow theory employed in this model is a two-dimensional extension of the Aw-Rascle theory. The flow parameters, including vehicle density, and vertical and horizontal velocities, are described by a system of first-order partial differential equations belonging to the family of hydrodynamic systems. This fluid-dynamics model is expressed in terms of the Euler and Lagrange variables. The admitted Lie point symmetries and the one-dimensional optimal system are determined for both sets of variables. It is found that the admitted symmetries for the two sets of variables form different Lie algebras, leading to distinct one-dimensional optimal systems. Finally, the Lie symmetries are utilized to derive new similarity closed-form solutions.
1. Introduction
The theory of invariant transformations, known as symmetry analysis and established by Sophus Lie, offers a systematic approach to studying nonlinear differential equations [1,2,3]. In the context of a given differential equation, the existence of invariant transformations implies the presence of similarity variables. These variables allow the given differential equation to be expressed in a simpler equivalent form by either reducing the order of derivatives or the number of independent variables. The reduction in degrees of freedom is a fundamental step in the Lie symmetry analysis for partial differential equations, while in the case of ordinary differential equations, it involves reducing the order of the equation [4,5].
Once the equation is reduced, it may either become a differential equation with a known solution or be further investigated using the symmetry approach to potentially transform it into an algebraic form, if feasible.
The Lie symmetry analysis has been applied with success in the study of dynamical systems in physics and in all areas of applied mathematics. In [6], it was performed a complete classification of the admitted Lie symmetries for two-dimensional Newtonian; see also the recent studies [7,8], where the conservation laws are determined. An extension of the Lie symmetry analysis in higher-dimensional Newtonian systems is given in [9]. The Ermakov-Pinney system it is a Newtonian dynamical system that has the property to be invariant under the Lie algebra [10,11]. Hence, with the requirement of a higher-order dynamical system to admit as Lie symmetries the elements of the Lie algebra, the Ermakov-Pinney system has been generalized to higher-dimensions [12,13] and to non-flat geometries [14]. The Hénon-Heiles system is a dynamical system that has been proposed to describe the galactic dynamics. The system possesses only one Lie symmetry vector; however, in [15,16,17], extensions of the Hénon-Heiles system have been derived with additional Lie symmetries and non-trivial conservation laws. The third law of Kepler of Newtonian gravity is related to the existence of the scaling symmetry for the gravitational potential [18]. There are various studies in the literature where the Lie symmetries are used for the study of gravitational systems in general relativity and cosmology; see, for instance, [19,20,21,22] and the references therein.
The Lie symmetries for the one-dimensional shallow-water system were determined in [23]. The complete symmetry classification of shallow-water equations for a two-dimensional flow was performed in [24], while the same problem in a rotating frame with non-zero Coriolis component was investigated in [25], while a varying bottom topography was considered in [26]; see also [27,28,29]. The group properties for the hyperbolic equations of two-phase flow models of fluid dynamics were investigated in [30,31,32]. As far as MHD systems are concerned, the Lie symmetries were investigated in a series of studies [33,34,35]. Applications of the Lie symmetries in biology, financial mathematics, and others can be found in [36,37,38,39,40] and the references therein.
Recently in [41], the Lie symmetry method was applied for the study of the Aw-Rascle-Zhang model for traffic estimation. Specifically, the Aw-Rascle-Zhang model is a macroscopic models for the traffic description, which is consisted by two first-order hyperbolic partial differential equations, which describe the evolution of vehicles density and of the velocity components. With the use of the Lie symmetries, new similarity solutions for the Aw-Rascle-Zhang model were determined while invariant functions were constructed. In this study, we consider a two-dimensional (2D) Aw-Rascle model that describes the traffic in multi-lanes in a highway [42]. This specific 2D Aw-Rascle model is the simplest generalization of the macroscopic Aw-Rascle-Zhang model in higher dimensions. It consists of three first-order hyperbolic partial differential equations which describe the evolution of the vehicle density and of the two velocities in the plane. Other extensions of this model have been considered in [43,44,45].
For the 2D Aw-Rascle model, we performed a detailed symmetry classification and we determine the one-dimensional optimal system. The Lie symmetries are applied to determine similarity transformations and find closed-form exact solutions. We investigate the Lie symmetries for the 2D Aw-Rascle model expressed in the Euler and in the Lagrange variables. The systems are equivalent; however, they are related based on a nonlocal transformation, which means that the point symmetries are not survived. Thus, with this study, we would also to investigate if there exists a preference frame for the symmetry analysis of the such hydrodynamics models. For the system expressed in the Euler variables, we found that the admitted Lie symmetries in the generic case form a seven-dimensional Lie algebra, while for special values of the free parameters, additional symmetries exist. On the other hand, for the equivalent system in the Lagrange variables, the dynamical system admits infinity Lie symmetries with a five dimensional finite subalgebra. Consequently, there are differences in the admitted Lie symmetries in the two frames.
For the one-dimensional Aw-Rascle, there are various known exact solutions which describe shock waves [46], solitary waves [47], and others [48,49]. As far as our knowledge extends, no nontrivial exact and analytic solutions for the 2D Aw-Rascle system have been discovered in the existing literature. Instead, researchers have relied on numerical techniques to solve the 2D Aw-Rascle equations. This characteristic of the research renders our study notably relevant and valuable for solving the traffic estimation problem. The paper’s structure is outlined as follows.
In Section 2, we present the 2D Aw-Rascle model. The basic properties and definitions of the Lie symmetry analysis are presented in Section 3. The main results of this work are presented in Section 4, where we give the complete symmetry analysis for the 2D Aw-Rascle in the Euler and in the Lagrange variables, respectively. New similarity closed-form solutions are presented. Finally, in Section 5, we draw our conclusions.
2. The 2D Aw-Rascle Model
Macroscopic traffic flow models have been proved to be in consistency with short-term forecast for traffic management since they can provide shock wave and collisions behaviours. The simplest macroscopic model for traffic estimation is the Lighthill-Whitham-Richards (LWR) model related to the density of the one-dimensional traffic with a flux function with the first-order partial differential equation [50,51,52]
The main assumption of the LWR model is that all vehicles have the same velocity, which however, is not true in real situations.
The 1D Aw-Rascle model [53] is a second-order model for the traffic estimation where the flux and
in which is a the pressure component for the traffic flow, considered to be , , and constant is the relaxation time which describes drivers’ driving behaviour adapting to equilibrium density-velocity relation over time. defines the equilibrium velocity-density relation, and it is a decreasing function.
A similar second-order traffic estimation model was proposed independently by Zhang [54]
The combination of the latter two second-order models leads to the so-called 1D Aw-Rascle-Zhang model.
A simple generalization of the 1D Aw-Rascle-Zhang model for traffic estimation in multi-lane highways was proposed in [42]. Multi-lane models introduce the coupling of the vehicles with lane-changing [55].
In the Euler variables, the 2D Aw-Rascle model for traffic flow is [42]
where , are the velocity components of the two different lanes and functions and are defined as
in which and are the traffic pressures. In the following, we consider and .
In the Lagrange variables, the 2D Aw-Rascle model reads [42]
where now
where now , and . Therefore, and in which ,
3. The Theory of Lie Symmetries
In this section, we briefly discuss the basic properties and definitions of Sophus Lie theory on the symmetries of differential equations.
Consider a map of a one-parameter point transformation which transforms points defined by the function , that is, and corresponding infinitesimal transformation with generator the vector field [56]
Variables are the independent variables of the dynamical system are the dependent variables where for the two-dimensional Aw-Rascle model , and .
We can define the generator of the infinitesimal transformation as follows:
or equivalently
The vector field is a Lie point symmetry for the system of differential equations:
if and only if
Equation (17) defines the Lie derivative of a function along the vector field X, that is, expression (17) is written in the equivalent form [5]:
where is now the nth-extension of in the jet-space defined as
with
in which .
The admitted point transformations, which leave a given differential equation invariant, form a closed Lie group, while the corresponding generators form a Lie algebra under the operation of taking the Lie Bracket. Hence, if is a solution of the differential equation and is a Lie symmetry, then under the one-parameter point transformation with map , , function is also a solution of the differential equation . We shall say that Lie symmetries drag solution trajectories to solution trajectories.
The existence of a Lie symmetry for a given system of differential equations means that there exists a point transformation where the differential equation can be simplified. Let be a Lie symmetry; then, we can define a set of new variables
such that is written in the canonical form , where it holds
Consequently, in the canonical variables, the number of independent variables is reduced by one in the case of partial differential equations. The transformation which gives the canonical variables is called similarity transformation, and the resulting solutions are known as similarity solutions or invariant solutions.
One-Dimensional Optimal System
Not all the similarity transformations related to the Lie symmetries of a differential equation lead to independent similarity solutions, that is, because there exist a map, known as the Adjoint representation of the Lie algebra, which connects the similarity solutions. The classification of all the independent similarity transformation is essential for the complete Lie symmetry analysis of differential equations. The one-dimensional Lie algebras with independent similarity transformations form the one-dimensional optimal system [57].
Now, assume the th-dimensional Lie algebra with elements and structure constants , , i.e.,
The two generic Lie symmetry vectors
are equivalent if and only if
or
where are constant coefficients and is the Adjoint operator expressed as
The one-dimensional subalgebras of , which are not related through the Adjoint representation, form the one-dimensional optimal system. The determination of the one-dimensional system is essential in order to perform a complete classification of all the possible similarity transformations and solutions.
The independent constants coefficients are invariant functions of the Adjoint operator . Specifically, if is a function of , the invariants are given by the linear system of partial differential equations:
The latter system is essential for the derivation of the one-dimensional system.
4. Lie Symmetries in the Euler Variables
In this section, we proceed with the application of the Lie symmetry condition (18) for the derivation of the one-parameter point transformations where the 2D Aw-Rascle model expressed in the Euler variables is invariant.
4.1. Lie Symmetries for Arbitrary Parameters and
For arbitrary values of the free parameters and , the admitted Lie symmetries for the 2D Aw-Rascle system (6)–(8) are
The admitted Lie symmetries form a seven-dimensional Lie algebra, namely with nonzero commutators:
In Table 1, we summarize the commutators for the seven-dimensional Lie algebra . In the Morozov-Mubarakzyanov Classification Scheme [58,59,60,61], the Lie algebra is expressed as Furthermore, in Table 2, we present the Adjoint representation for the Lie algebra .

Table 1.
Commutator table for the admitted Lie point symmetries for the 2D Aw-Rascle system in Euler variables.
Table 2.
Adjoint representation for the admitted Lie point symmetries of for the 2D Aw-Rascle system in Euler variables.
Lie Symmetries for
In the special case where , there exist additional Lie symmetries admitted by the 2D Aw-Rascle system (6)–(8). In particular, the admitted Lie symmetries form a ten-dimensional Lie algebra, namely , with subalgebra studied before and the additional Lie symmetries
For the Lie algebra , the additional nonzero commutators are
4.2. One-Dimensional Optimal System
The first step for the derivation of the one-dimensional optimal system which corresponds to the Lie algebra is the calculation of the invariants for the Adjoint representation.
Therefore, from expression (28) and Table 1, we end with the following linear system of partial differential equations:
The solution to the latter system is from where it follows that the invariants of the Adjoint representation are and .
Assume now case and the generic symmetry vector are
then, the vector field
for specific values of the parameters , , , and read
which is the equivalent symmetry vector to the generic vector field X.
When and the Lie algebra , the invariants of the Adjoint representation for the are given by the following system:
We calculate from where we infer that and are the invariants.
Therefore, the generic symmetry vector field X can be written in the equivalent form:
Similarly, for , the unique invariant of the Adjoint representation is , which means that the generic vector field X can be written as the symmetry vector:
Finally, for and , the invariants of the Adjoint representation are and , from where it follows that the generic symmetry vector can be written in the equivalent form:
In a similar way, we conclude that if , and , the generic symmetry vector field is
while for , and , it follows
Finally for , , and we have the invariants and with generic vector field:
4.3. Similarity Solutions
In order to demonstrate the novelty of the Lie symmetries, we continue with the application of the Lie invariants in order to reduce the system of partial differential equations and to determine closed-form similarity solutions. Since the dynamical system has three independent variables, we have to make use of two Lie symmetries so that the reduced equations are ordinary differential equations.
Consider the two symmetry vectors then, the resulting similarity transformation is
where the 2D Aw-Rascle system (6)–(8) now becomes
where the closed-form solution reads
Therefore, at , for , .
Similarly, the application of the vector fields provides the similarity transformation
and reduced system
Hence, the closed-form solution is
Consequently, at , for , .
Furthermore, if we consider the vector fields for , , we determine the close-form solution
in which
On the other hand, application of the Lie symmetry vectors for , , gives the closed-form solution:
with a limit at , .
5. Lie Symmetries in the Lagrange Variables
We proceed with the derivation of the Lie symmetries for the 2D Aw-Rascle model in the Lagrange variables, that is, for the system (10) and (11). In the Lagrange variables, the independent variables are and the dependent variables are .
The Lie symmetry condition (18) gives that the admitted Lie symmetries of the system (10) and (11) form an infinity Lie algebra, , consisting of the vector fields:
In the following, we focus on the five-dimensional Lie algebra: .
The nonzero commutators for the Lie algebra are
Therefore, we conclude that is expressed as the Lie algebra with commutators given in Table 3, while the corresponding Adjoint representation is given in Table 4.
Table 3.
Commutator table for the admitted Lie point symmetries for the 2D Aw-Rascle system in Lagrange variables.
Table 4.
Adjoint representation for the admitted Lie point symmetries of for the 2D Aw-Rascle system in Lagrange variables.
In the special case where and when or , additional vector fields which describe infinity symmetries for the system (10) and (11) exist. Since in this study, we are interested in the finite symmetries, we focus on the generic case.
We observe that the 2D Aw-Rascle model in the Lagrange variables admits five finite Lie symmetries while the equivalent system in the Euler variables admits seven Lie symmetries. Hence, someone will ask what happened with the symmetries which have been lost. We remark that the transformation between the Euler and the Lagrange variables is a nonlocal transformation; as a result, some of the Lie symmetries for the one system reduce to nonlocal symmetries for the other system. Note that we have focused in the determination of the point symmetries and not in any other kind of symmetry vectors.
5.1. One-Dimensional Optimal System
In order to determine the one-dimensional optimal system, we apply the same procedure as before. Thus, we determine the invariants of the Adjoint representations by solving the following system of linear partial differential equations:
That is, , which means that the invariants of the Adjoint representations are the coefficients and .
We consider the generic vector field
which means that after the application of the Adjoint representation
for specific values of the free parameters , , the equivalent form of the generic symmetry vector Y is
We conclude that the one-dimensional optimal system for the five-dimensional Lie algebra consists of the Lie algebras
5.2. Similarity Transformations
From the two symmetry vectors , we find the similarity transformation:
with solution
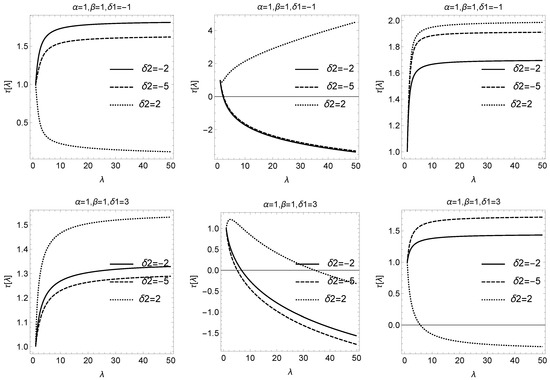
Similarly, the application of the vector fields gives the similarity transformation
with solution
In Figure 1, we present the numerical simulation of the latter three-dimensional system for different values of the free parameters. We observe that there exist an attractor where the variables , U, and become constant.
Last but not least, reduction with respect to the vector fields for gives the similarity transformation:
with reduced equations
The latter dynamical system can be investigated further numerically, but such an analysis is not within the scope of this work.
6. Conclusions
In this piece, we extended our investigation of the application of the Lie symmetries in traffic estimation models. Specifically, we performed a detailed investigation of the group invariant properties for a macroscopic traffic estimation model with multi-lane vehicle transition. The model of our consideration, which is a simple extension of the Aw-Rascle theory in the two-dimensional case, consists of three hyperbolic first-order partial differential equations, similar to that of the shallow-water equations.
We expressed the 2D Aw-Rascle system in two different frames, by using the Euler variables and the Lagrange variables. For each frame, we determined the Lie symmetries and we investigated the group properties of the admitted Lie symmetries. Furthermore, we constructed a one-dimensional optimal system and we made use of the Lie symmetries in order to construct closed-form similarity solutions.
For the Euler variables, we found that the resulting system admits seven Lie symmetries which form the Lie algebra. The one-dimensional optima system consists of twenty three one-dimensional Lie algebras. On the other hand, in the Lagrange variables, the dynamical system admits an infinite number of symmetries with a five-dimensional finite subalgebra. The finite elements form the Lie algebra where the one-dimensional optimal system is constructed via nine one-dimensional Lie algebras.
We remark that while the two systems are equivalent, the Lie symmetry analysis provides different results. Thus, it is of special interest to investigate the symmetries of hydrodynamic systems in the two different frames.
From the results of this study, it is clear that the Lie symmetry analysis can be used to construct important invariants for the traffic estimation. In future work, we plan to extend our analysis by introducing multiple types of vehicles and also apply other methods for the derivation of new solutions; see, for instance, the approach applied in [62,63,64] and the references therein.
Funding
This research received no external funding.
Data Availability Statement
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
Acknowledgments
The author thank the support from Vicerrectoría de Investigación y Desarrollo Tecnológico (Vridt) at Universidad Católica del Norte through Núcleo de Investigación Geometría Diferencial y Aplicaciones, Resolución Vridt No-096/2022.
Conflicts of Interest
The author declares no conflict of interest.
References
- Lie, S. Theorie der Transformationsgrupprn: Volume I; Chelsea: New York, NY, USA, 1970. [Google Scholar]
- Lie, S. Theorie der Transformationsgrupprn: Volume II; Chelsea: New York, NY, USA, 1970. [Google Scholar]
- Lie, S. Theorie der Transformationsgrupprn: Volume III; Chelsea: New York, NY, USA, 1970. [Google Scholar]
- Ibragimov, N.H. CRC Handbook of Lie Group Analysis of Differential Equations, Volume I: Symmetries, Exact Solutions, and Conservation Laws; CRS Press LLC: Boca Raton, FL, USA, 2000. [Google Scholar]
- Ovsiannikov, L.V. Group Analysis of Differential Equations; Academic Press: Boston, MA, USA, 1982. [Google Scholar]
- Sen, T. Lie symmetries and integrability. Phys. Lett. A 1987, 122, 327. [Google Scholar] [CrossRef]
- Tsamparlis, M.; Paliathanasis, A. Two-dimensional dynamical systems which admit Lie and Noether symmetries. J. Phys. A Math. Theor. 2011, 44, 175202. [Google Scholar] [CrossRef]
- Mitsopoulos, A.; Tsamparlis, M.; Paliathanasis, A. Integrable and Superintegrable Potentials of 2d Autonomous Conservative Dynamical Systems. Symmetry 2020, 12, 1655. [Google Scholar] [CrossRef]
- Tsamparlis, M.; Paliathanasis, A.; Karpathopoulos, L. Autonomous three-dimensional Newtonian systems which admit Lie and Noether point symmetries. J. Phys. A Math. Theor. 2012, 45, 275201. [Google Scholar] [CrossRef][Green Version]
- Haas, F.; Goedert, J. Dynamical symmetries and the Ermakov invariant. Phys. Lett. A 2001, 279, 181. [Google Scholar] [CrossRef][Green Version]
- Leach, P.G.L.; Andriopoulos, K. The Ermakov equation: A commentary. Appl. Anal. Discrete Math. 2008, 2, 146. [Google Scholar] [CrossRef]
- Moyo, S.; Leach, P.G.L. A note on the construction of the Ermakov–Lewis invariant. J. Phys. A Math. Gen. 2002, 35, 5333. [Google Scholar] [CrossRef]
- Mitsopoulos, A.; Tsamparlis, M. The generalized Ermakov conservative system. Eur. Phys. J. Plus 2021, 136, 1. [Google Scholar] [CrossRef]
- Tsamparlis, M.; Paliathanasis, A. Generalizing the autonomous Kepler–Ermakov system in a Riemannian space. J. Phys. A Math. Theor. 2012, 45, 275202. [Google Scholar] [CrossRef]
- Abraham-Shrauner, B. Lie group symmetries and invariants of the Hénon–Heiles equations. J. Math. Phys. 1990, 31, 1627. [Google Scholar] [CrossRef]
- Leach, P.G.L. A direct approach to finding exact invariants for one-dimensional time-dependent classical Hamiltonians. J. Math. Phys. 1981, 22, 679. [Google Scholar] [CrossRef]
- Fordy, A.P. Stochastic resonance in a bistable system. Phys. Lett. A 1983, 97, 21. [Google Scholar] [CrossRef]
- Prince, G.; Eliezer, C.J. Symmetries of the time-dependent N-dimensional oscillator. J. Phys. A Math. Gen. 1981, 14, 587. [Google Scholar] [CrossRef]
- Khalique, C.M.; Ntsime, P. Exact solutions of the Lane–Emden-type equation. New Astron. 2008, 13, 476. [Google Scholar] [CrossRef]
- Kweyama, M.C.; Govinder, K.S.; Maharaj, S.D. Noether and Lie symmetries for charged perfect fluids. Class. Quantum Grav. 2011, 28, 105005. [Google Scholar] [CrossRef]
- Christodoulakis, T.; Dimakis, N.; Terzis, P.A. Lie point and variational symmetries in minisuperspace Einstein gravity. J. Phys. A Math. Gen. 2014, 47, 095202. [Google Scholar] [CrossRef]
- Tsamparlis, M.; Paliathanasis, A. Symmetries of Differential Equations in Cosmology. Symmetry 2018, 10, 233. [Google Scholar] [CrossRef]
- Velan, M.S.; Lakshmanan, M. Lie symmetries and invariant solutions of the shallow-water equation. Int. J. Non-Linear Mech. 1996, 31, 339. [Google Scholar] [CrossRef]
- Chesnokov, A.A. Symmetries and exact solutions of the shallow water equations for a two-dimensional shear flow. J. Appl. Mech. Technol. Phys. 2008, 49, 737. [Google Scholar] [CrossRef]
- Paliathanasis, A. Shallow-water equations with complete Coriolis force: Group properties and similarity solutions. Math. Meth. Appl. Sci. 2021, 44, 6037. [Google Scholar] [CrossRef]
- Bihlo, A.; Poltavets, N.; Popovych, R.O. Lie symmetries of two-dimensional shallow water equations with variable bottom topography. Chaos 2020, 30, 073132. [Google Scholar] [CrossRef]
- Pandey, M. Lie Symmetries and Exact Solutions of Shallow Water Equations with Variable Bottom. Int. J. Nonlinear Sci. Numer. Simul. 2015, 16, 93. [Google Scholar] [CrossRef]
- Stapathy, P.; Sekhar, T.R. Optimal system, invariant solutions and evolution of weak discontinuity for isentropic drift flux model. Eur. Phys. J. Plus 2022, 137, 1183. [Google Scholar] [CrossRef]
- Huo, C.; Li, L. Lie Symmetry Analysis, Particular Solutions and Conservation Laws of a New Extended (3+1)-Dimensional Shallow Water Wave Equation. Symmetry 2022, 14, 1855. [Google Scholar] [CrossRef]
- Bira, B.; Sekhar, T.R. Exact solutions to drift-flux multiphase flow models through Lie group symmetry analysis. Appl. Math. Mech.-Engl. Ed. 2015, 36, 1105. [Google Scholar] [CrossRef]
- Bira, B.; Sekhar, T.R.; Zeidan, D. Application of Lie groups to compressible model of two-phase flows. Comput. Math. Appl. 2016, 71, 46. [Google Scholar]
- Banda, M.K.; Herty, M.; Ngnotghouye, J.-M.T. Toward a mathematical analysis for drift-flux multiphase flow models in networks. SIAM J. Sci. Comput. 2010, 31, 4633. [Google Scholar] [CrossRef]
- Moawad, S.M. Variational principles for ideal MHD of steady incompressible flows via Lie-point symmetries with application to the magnetic structures of bipolar sunspots. Eur. Phys. J. Plus 2020, 135, 585. [Google Scholar] [CrossRef]
- Webb, G.M.; Zank, G.P.; Kaghashvili, E.K.; Ratkiewicz, R.E. Magnetohydrodynamic waves in non-uniform flows II: Stress-energy tensors, conservation laws and Lie symmetries. J. Plasma Phys. 2005, 71, 811. [Google Scholar] [CrossRef]
- Webb, G.M.; Zank, G.P. Fluid relabelling symmetries, Lie point symmetries and the Lagrangian map in magnetohydrodynamics and gas dynamics. J. Phys. A Math. Theor. 2006, 40, 545. [Google Scholar] [CrossRef]
- Torrisi, M.; Tracina, R. Lie symmetries and solutions of reaction diffusion systems arising in biomathematics. Symmetry 2021, 13, 1530. [Google Scholar] [CrossRef]
- Zhang, Z.-Y.; Li, G.-F. Lie symmetry analysis and exact solutions of the time-fractional biological population model. Phys. A Stat. Mech. Appl. 2020, 540, 123134. [Google Scholar] [CrossRef]
- Gazizov, R.K.; Ibragimov, N.H. Lie symmetry analysis of differential equations in finance. Nonlinear Dyn. 1998, 17, 387. [Google Scholar] [CrossRef]
- del Pilar Marquez, A.; Garrido, T.M.; Recio, E.; de la Rosa, R. Lie symmetries and exact solutions for a fourth-order nonlinear diffusion equation. Math. Math. Appl. Sci. 2022, 45, 10614. [Google Scholar] [CrossRef]
- Rehman, K.U.; Malik, M.Y. On Lie symmetry mechanics for Navier–Stokes equations unified with non-Newtonian fluid model: A classical directory. Phys. A Stat. Mech. Appl. 2019, 535, 122469. [Google Scholar] [CrossRef]
- Paliathanasis, A.; Leach, P.G.L. Lie Symmetry Analysis of the Aw–Rascle–Zhang Model for Traffic State Estimation. Mathematics 2023, 11, 81. [Google Scholar] [CrossRef]
- Herty, M.; Moutari, S.; Visconti, G. Macroscopic Modeling of Multilane Motorways Using a Two-Dimensional Second-Order Model of Traffic Flow. SIAM J. Appl. Math. 2018, 78, 2252. [Google Scholar] [CrossRef]
- Xin, X.; Guo, L. Characteristic Decomposition of the Two-Dimensional ARZ Traffic Flow System. Bull. Malays. Math. Soc. 2023, 46, 69. [Google Scholar] [CrossRef]
- Piu, M.; Puppo, G. Stability analysis of microscopic models for traffic flow with lane changing. NHM 2022, 17, 495. [Google Scholar] [CrossRef]
- Yu, H.; Kvstic, M. Two-Lane Traffic Control. In Traffic Congestion Control by PDE Backstepping; Systems & Control: Foundations & Applications; Birkhäuser: Cham, Switzerland, 2022. [Google Scholar]
- Goatin, P. The Aw–Rascle vehicular traffic flow model with phase transitions. Math. Comp. Mod. 2006, 44, 287. [Google Scholar] [CrossRef]
- Wu, C.-X.; Zhang, P.; Wong, S.C.; Qao, D.-L.; Dai, S.-Q. Solitary wave solution to Aw- Rascle viscous model of traffic flow. Appl. Math. Mech. 2013, 34, 523. [Google Scholar] [CrossRef][Green Version]
- Yin, G.; Chen, J. Existence and Stability of Riemann Solution to the Aw-Rascle Model with Friction. Indian J. Pure Appl. Math. 2018, 49, 671. [Google Scholar] [CrossRef]
- Greenberg, J.M. Extensions and Amplifications of a Traffic Model of Aw and Rascle. SIAM J. Appl. Math. 2001, 62, 729. [Google Scholar] [CrossRef]
- Lighthill, M.J.; Whitham, G.B. On kinematic waves II. A theory of traffic flow on long crowded roads. Proc. R. Soc. A 1955, 229, 317. [Google Scholar]
- Richards, P.I. Shock waves on the highway. Oper. Res. 1956, 4, 42. [Google Scholar] [CrossRef]
- Daganzo, C.F. The cell transmission model: A dynamic representation of highway traffic consistent with the hydrodynamic theory. Transp. Res. B 1994, 28, 269. [Google Scholar] [CrossRef]
- Aw, A.; Rascle, M. Derivation of continuum traffic flow models from microscopic follow-the-leader models. SIAM J. Appl. Math. 2000, 60, 916. [Google Scholar] [CrossRef]
- Zhang, H.M. A non-equilibrium traffic model devoid of gas-like behavior. Transp. Res. B 2002, 36, 275. [Google Scholar] [CrossRef]
- Xing, J.; Wu, W.; Cheng, Q.; Liu, R. Traffic state estimation of urban road networks by multi-source data fusion: Review and new insights. Phys. A Stat. Mech. Appl. 2022, 595, 127079. [Google Scholar] [CrossRef]
- Stephani, H. Differential Equations: Their Solutions Using Symmetry; Cambridge University Press: New York, NY, USA, 1989. [Google Scholar]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Springer: New York, NY, USA, 1993. [Google Scholar]
- Morozov, V.V. Classification of nilpotent Lie algebras of sixth order. Izvestia Vysshikh Uchebn Zavendeniĭ Matematika 1958, 5, 161. [Google Scholar]
- Mubarakzyanov, G.M. On solvable Lie algebras. Izvestia Vysshikh Uchebn Zavendeniĭ Matematika 1963, 32, 114. [Google Scholar]
- Mubarakzyanov, G.M. Classification of real structures of Lie algebras of fifth order. Izvestia Vysshikh Uchebn Zavendeniĭ Matematika 1963, 34, 99. [Google Scholar]
- Mubarakzyanov, G.M. Classification of solvable Lie algebras of sixth order with a non-nilpotent basis element. Izvestia Vysshikh Uchebn Zavendeniĭ Matematika 1963, 35, 104. [Google Scholar]
- Zhang, X.; Li, X.P. New explicit solutions for the (1+ 1)-dimensional mikhailov-novikov-wang equation via two analytical methods. Optik 2021, 236, 166968. [Google Scholar]
- Khater, M.M.A. Advancements in Computational Techniques for Precise Solitary Wave Solutions in the (1+ 1)-Dimensional Mikhailov-Novikov-Wang Equation. Int. J. Theor. Phys. 2023, 62, 152. [Google Scholar] [CrossRef]
- Hoseini, K.; Hincal, E.; Mirekhtiary, F.; Sadri, K.; Obi, O.A.; Denker, A.; Mirzazadeh, M. A fourth-order nonlinear Schrödinger equation involving power law and weak nonlocality: Its solitary waves and modulational instability analysis. Optik 2023, 284, 170927. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).