Abstract
In this study, the state consensus problem is investigated for a class of nonlinear fractional-order multi-agent systems (FOMASs) by using a dynamics event-triggered sliding mode control approach. The main objective is to steer all agents to some bounded position based on their own information and the information of neighbor agent. Different from the existing results, both asymptotic consensus problem and Zeno-free behavior are ensured simultaneously. To reach this objective, a novel event-triggered sliding mode control approach is proposed, composed of distributed dynamic event-triggered schemes, event-triggered sliding mode controllers, and auxiliary switching functions. Moreover, to implement the distributed control scheme, the fractional-order adaptive law is also developed to tuning the coupling weight, which is addressed in distributed protocol. With the improved distributed control scheme, all signals in the fractional-order closed-loop systems are guaranteed to be consensus and bounded, and a novel approach is developed to avoid the Zeno behavior. Finally, the availability and the effectiveness of the above-mentioned approach are demonstrated by means of a numerical example.
1. Introduction
There is an extensive and promising range of applications for the problem of cooperative control in multi-agent systems (MASs), from coordinating a group of mobile robots to forming a group of unmanned aircraft. In particular, there are a large number of cooperative control results for MASs with various tasks, such as cooperative detection, cooperative assistance seeking, formation, and swarming, that have been extensively researched in recent years [1,2,3,4,5]. In [6], second-order nonlinear MASs have been studied, and the fault-tolerant agreement robust control algorithm has been used to address the leader-following agreement issue with uncertain dynamics and actuator failures, while the findings have been generalized to the special case of the above problem [7,8,9]. In [10,11], local and global performances for MASs based on a class of nonlinear dynamics have been addressed, respectively. Note that from the system point of view, the above results aim to be applicable in an integer-order multi-agent system. Therefore, the direct generalization of these results to fractional-order nonlinear systems is difficult due to the inherent challenges in the noninteger character of the derivative powers. In addition, unnecessary communication between agents causes a waste of resources.
In the field of research on uncertain nonlinear systems, everyone is aware of how frequently the adaptive control scheme is addressed for the system and proposed for the control algorithms [12]. A priori awareness of the input gain signs of agents as control directions of agents has been the primary presumption of adaptive/robust consensus procedures in the literature [13,14,15]. Distributed consensus techniques have been devised to address the MASs issue under the assumption that the uncertainty can be linearly quantified using an artificial neural network. Numerous positive outcomes have been produced thus far for the state or output consensus issues with various agent dynamics, including single integration, double integration, T-S fuzzy, discrete-time, fractional-order, descriptor, general linear, and nonlinear systems [16,17,18,19,20].
Fractional-order systems are better suited to simulate various real-world application systems than integer-order systems, including electromagnetic waves, dielectric polarization, and viscoelastic systems [21,22,23]. In agreement with the vast majority of mathematicians, integer-order systems are a special case of fractional-order systems, which is an obvious conclusion. In [24,25,26,27], the authors have been informed that the stability issue of fractional-order systems is exceedingly challenging and complex because the traditional stability theory cannot be transplanted and applied. Recent studies have concentrated on the coordination issue for fractional-order MASs (FOMASs) due to the broad application potential of such systems. The case of networked FOMASs has been generalized for the first-order consensus problem in [20]. For FOMASs with communication delays, [28] has explored the trouble caused by time delays by designing a novel consensus algorithm. In [29], the uncertainty dynamics have been investigated in the fractional-order consensus problem by designing novel co-controllers with output feedback. Reference [30] has addressed the synchronization challenge for an universal fractional-order dynamical network model. When leader-following fractional-order consensus problems with nonlinear dynamics were first proposed, most results were obtained by converting them to states or output consistency problems by establishing an error system between followers and the leader. Subsequently, in [31], a relative state error feedback-based control approach has been presented to overcome the constraints of such situations. To handle the leader-following agreement problem of nonlinear FOMASs, a novel adaptive control method was developed in [32]. Ref. [33] has explored the consensus problem for uncertain linear FOMASs, whereas [34] has addressed the associated confinement challenge.
To decrease disturbance and uncertainty, a robust control mechanism called sliding mode control (SMC) can be applied [35,36]. Over the last couple of decades, many outstanding results of SMC theory and even-triggered control have been reported [37,38,39]. Therein, by considering limited computation resources for the digital platform, distributed event-triggered sliding mode control problem for various systems has received widespread attention [40,41]. The event-triggered scheme is designed in [42], which does not require continuous communication among followers. In [43], the sufficient conditions are proposed for guaranteed cost consensus and a Lyapunov–Krasovskii functional is constructed for a Markov jumping multi-agent system. The integral-type sliding surface and distributed event-triggered sliding mode control approach are proposed such that the practical tracking consensus is reached. It should be noted that the integral-type sliding surface of each agent proposed in [40] depends on the continuous states of the leader. However, when the agent cannot receive the states of the leader, this type of controller may make the integral-type sliding surface unavailable. The event-triggered consensus tracking control issue in second-order MASs with nonlinear terms was examined in [44].
Since fractional-order systems can describe more complex practical application scenarios, and inspired by the mentioned results, the cooperative control issue of the FOMASs with Lipschitz nonlinear is studied by designing the event-triggered sliding mode control law. Furthermore, it is worth pointing out that most existing relevant results (see, e.g., the references mentioned above) are rarely concerned with the FOMASs, which is an important case in reality. The main challenge in this study is how to collaboratively control each agent described by fractional-order system to achieve consensus and to ensure a certain level of robustness. Based on the fractional-order adaptive law, the novel distributed event-triggered sliding mode control protocol is re-designed in this study.
In comparison with the existing works, a summary of the main contributions of this study is concluded as follows.
- (1)
- In contrast with earlier studies in [45], the system considered in this paper can be adapted to more complex scenarios. In addition, a fractional-order distributed coordinator framework with adaptive capacity are designed based on the event-triggered sliding mode control.
- (2)
- To overcome difficulties in distributed sliding control, different from [44], an auxiliary sliding mode function is constructed without sustaining communication among agents, which makes distributed event-triggered sliding mode control laws only receive signals at triggering instants, such that the use of communication resources is saved.
- (3)
- Compared with the previously reported approach in [31], the novel fractional-order adaptive law is proposed to ensure that the convergence speed of the agent and robustness. Moreover, the nonlinear fractional-order stability theory is applied to guarantee the achievement of the distributed consensus objective.
The remaining portion of this study is organized as follows. Section 2 covers the nomenclature, some preliminary details, and the structure of proposal. Section 3 develops the key findings. A simulation scenario is offered in Section 4 as an illustration and verification of our theoretical results. Section 5 is the conclusion.
Notations: In this study, symbols , , and are used to represent the positive real number, complex number, and positive integer, respectively. We use to represent the Euclidean norm for real vectors. For real matrices M and N, denotes the Kronecker product. We use to represent the N-dimensional . For vectors , define with . For the matrix , denotes the minimum characteristic value of matrix L. For a function , represents the -th order differintegration operator of function . Lastly, denotes the sign function.
2. Preliminaries
This section introduces basic essential graph theory and Caputo fractional derivative concepts. Following that, the problem statement and necessary lemmas are supplied.
2.1. Graph Theory
Throughout this paper, relevant concepts of graph theory will be introduced, which are defined in [8,46,47,48], including convexity, -strongly convexity, connected graph, and weight-balanced digraph. Specifically, (i.e., a triple ) is used to denote the weight-balanced digraph, where , , and L is the Laplacian of this digraph, which is defined as with and for . When is an undirected graph, L is a positive symmetric constant matrix. Whether L is an undirected graph or a weighted digraph, the Laplacian matrix has at least one eigenvalue of zero and a matching eigenvector of .
2.2. Gaputo Fractional Derivative
It should be noted that fractional-order derivatives come in many different varieties, and the specific varieties of derivatives have no effect on the stability results, such as the Grunward–Letnikov derivative, Riemann–Liouville derivative, and Caputo derivative. In this paper, the Caputo fractional operator will be used to describe the model of MASs and establish the consensus stability properties. The Caputo derivative definition of a continuous function is given as follows [49]:
with
being the Gamma function generalizing fractional for noninteger argument, where and .
Then, the Mittag–Leffler function is introduced to describe the solutions of the fractional-order system, which is defined as follows:
for any . In particular, when , (3) can be rewritten as
Lemma 1
([50]). If a continuous function satisfies:
with and ρ denoting a constant, then for any , one has:
Lemma 2
([51]). Consider the following system:
where denotes the system state vector, denotes the fractional order, and is a constant matrix. If there exists a positive definite matrix such that
holds, the system is asymptotically stable.
2.3. Problem Formulation
Consider a FOMAS containing N agents with each agent i modeled by:
for , where represents the state vector of agent i, and represents the control input signal of agent i, respectively; note that . denotes the nonlinear system dynamic function, and f is a continuous function.
In this study, the objective aims at designing distributed controller for the agents to solve the coordinate state consensus problem. In particular, under specific initial conditions, the state of the agent i keep bounded, and the state satisfies:
In our system setup, the controller for agents has access to the outputs of the agent and the output of the neighbor agents.
This paper is also interested in the distributed implementation of the controllers. In this study, a weighted digraph is considered to denote the information exchange topology among the agents.
The following assumptions are made for the nonlinear dynamic function of the system and the communication topology.
Assumption 1.
The nonlinear function f is Lipschitz, that is:
where and denotes a constant.
Assumption 2.
The digraph is quasi-strongly connected and weight-balanced.
3. Main Results
To achieve the objectives of this study, the controller design of this paper is divided into three parts. Firstly, a novel distributed dynamic event-triggered schemes framework for each agent is proposed. Secondly, a new auxiliary switching function for each agent is constructed to prevent sliding mode controllers from receiving communication information at each triggering instant. Finally, the consensus problem and Zeno-free behavior are ensured simultaneously.
3.1. Dynamic Event-Triggered Communication Scheme
In this subsection, a dynamic event-triggered communication scheme is designed to reduce the use of the communication among the agent. Consider the following triggered instant for agent i:
where is a positive constant, ;
and the dynamic variable being generated by:
with and being two positive constants. Note that the sequence is the triggering instant of the ith agent and for .
By (12), we have:
Therefore, by the comparison principle, we obtain:
where is the initial time. Therefore, , and it is derived that .
3.2. Sliding Surface Design
For any agent i, the sliding surface is design by:
for , where denotes constant and is designed by:
with being a positive constant and .
Moreover, for each agent i, only the state is sent to the dynamic event-triggered schemes law at the time . Based on this situation, an auxiliary switching function is constructed for each agent i only containing the signal at each triggering instant as follows:
Define and . The compact form of the sliding surface is written as:
The event-triggered sliding mode control law is design by:
for , where
with being a constant to be determined.
Remark 1.
In this subsection, an auxiliary function (19) for each agent is constructed. The function (19) causes that the controller only acquire the state . Thus, the function (19) that only contains the state is developed to design the distributed event-triggered sliding mode controller, which can save more communication resources.
Lemma 3.
Theorem 1.
Proof Theorem 1.
Case 1: Firstly, when holds, then the state trajectories of all agents remain inside the set . Based on Lemma 4, it follows that . Therefore:
for and .
Since , if , , then ; if , , then . In summary, the state of agent will inside the set .
Case 2: In this case, the set will be proved to be a positively invariant set.
Consider the Lyapunov function candidate:
Then, the derivative of along the trajectories of the system (9) satisfies for :
where and . Thus, by Lemma 2 and [49], it shows that the state trajectories of all agents remain the set form of the initial time, that is, the set is a positively invariant set. □
Remark 2.
From Theorem 1, it is worth noting that the asymptotic consensus and Zeno-free behavior can be guaranteed simultaneously in the study. That is, the proposed method based on the distributed dynamic event-triggered scheme is proposed to ensure the exclusion of Zeno behavior in Theorem 1. According to definition in [52], the Zeno behavior is mathematically equivalent to . Thus, the corresponding conclusion is employed in the paper, and the Zeno behavior can be eliminated.
3.3. Design of Adaptive Distributed Controller
In order to improve the convergence rate, of the event-triggered sliding mode control law with adaptive coupling weights law is re-designed as follows:
for and , G and are the feedback protocol gains to be designed, and and are constants. denotes the coupling weight between agents i and j. In addition, .
Define the following error:
for and .
Therefore, the error dynamic of agent i and the adaptive law are as follows:
for and .
Define the following:
Therefore, from (31), we have:
for , which is a compact form of the FOMASs (31).
Lemma 4.
Consider the nonlinear dynamic function under Assumption 1. The following condition holds:
where is a positive constant.
Proof of Lemma 4.
Under Assumption 1, we have:
for any , where . □
3.4. Stability Analysis
In this part, the stability property of closed-loop FOMASs with a Lipschitz nonlinear value is established under the weight-balanced graph. Then, in a special case, the stability conditions of linear FOMASs are presented.
Theorem 2.
Consider the FOMASs (9) distributed dynamic event-triggered schemes (12) and event-triggered sliding mode control law (21). Under Assumptions 1 and 2, the objective (10) can be achieved for any initial conditions if there exists a positive constant such that:
holds. In addition, an infinite number of triggering will not occur in the closed-loop system over any interval with finite-length time.
Proof of Theorem 2.
From Assumption 1 and Lemma 4, by (31), we have:
for , where .
We chose the following candidate Lyapunov function:
for .
Apparently, there exists a integer such that:
for .
Based on (36), by fractional-order differential, it follows that:
for .
Note that if and only if , i.e., for . Then, we claim:
for any and .
To prove this claim, we assume that there are an time and , such that:
and for .
Similarly, we have:
for any . Therefore, it follows that:
for , where , then:
for .
By using the Caputo fractional derivative and (44), it follows that:
By using (42) and (45), we conclude that (41) holds for any . Based on Lemma 2, we have:
which implies that:
Therefore, it follows that for , which shows that the consensus of all state of agent can be achieved.
Next, we will prove that the distributed dynamic event-triggered schemes (12) for each agent does not exhibit Zeno behavior. Since , the following solution can be obtained:
where . By (15), we can obtain that:
Thus, the next event will not be triggered before , that is:
Therefore, for the interexecution interval length , , and thus, the Zeno-free behavior is obtained. □
Remark 3.
Theorem 3.
Consider the FOMASs (9) distributed dynamic event-triggered schemes (12), event-triggered sliding mode control law (21), and the adaptive distributed protocols (28) and (29). Under Assumptions 1 and 2, the objective (10) can be achieved for any initial conditions if the following hold:
In addition, an infinite number of triggering will not occur in the closed-loop system over any interval with finite-length time.
Proof of Theorem 3.
Consider a candidate Lyapunov function as follows:
for , where P is a positive matrix to be designed. The Caputo fractional derivative of V along the trajectory is as follows:
for . It is easy to check that:
By selecting the appropriate matrix P and such that (i.e., (52)), then (54) can be written as:
for .
Based on (51), we have:
for .
Remark 4.
Theorem 3 is an effective generalization and promotion of Theorem 2. Two results show that if better convergence performance is required, distributed control protocols with adaptive parameters can be applied; however, the parameter restrictions on the controller will become more strict. Later simulations will verify this conclusion.
4. Numerical Example
In this section, in order to verify the validity of the proposed dynamics event-triggered distributed sliding mode control approach, a numerical example is performed and two distributed algorithms are discussed: without adaptive law and with adaptive law.
In [45,53,54], the numerical simulations of fractional-order multi-intelligent body systems considered are mostly for first-order integrators, second-order integrators, linear systems, etc., whereas the results in this paper are able to handle general nonlinear FOMASs. To illustrate the effectiveness of designing distributed event-triggered controllers in this paper, FOMASs with general nonlinear terms, including trigonometric functions, polynomial nonlinear functions, etc., are considered. Thus, the nonlinear four agents of the fractional order will be considered with the fractional order , described by:
where , denotes the system state, and denotes the control input. The graph and adjacency matrix are shown in Figure 1. Consequently, Assumptions 1 and 2 are satisfied.
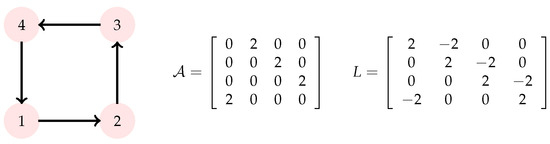
Figure 1.
The network interaction topology and the adjacency matrix.
Let , , , , and . Based on the system (58) and the network interaction topology, it follows that and . Therefore, . The parameters for and .
Consider . By the results of this study, there exists a positive constant such that the condition (36) holds. The condition (36) is guaranteed by Theorem 2. Then, states of all agents can be shown to converge to some bounded constant by the proposed the event-triggered sliding mode control law (21) and (28).
Consider the following initial states of the system: for , . Using the above initial conditions and parameters of the system controller, Figure 2, Figure 3, Figure 4, Figure 5, Figure 6 and Figure 7 shows the results of the numerical simulation. Figure 2 and Figure 3 show that all states of the controlled fractional-order agents are bounded and converge to and 1, respectively, which implies that Theorem 1 holds. Moreover, as shown in Figure 4 and Figure 5, all control input signals of the fractional-order agents are bounded. Sliding mode surfaces for agent are presented in Figure 6. The event release instants and release intervals are given in Figure 7.
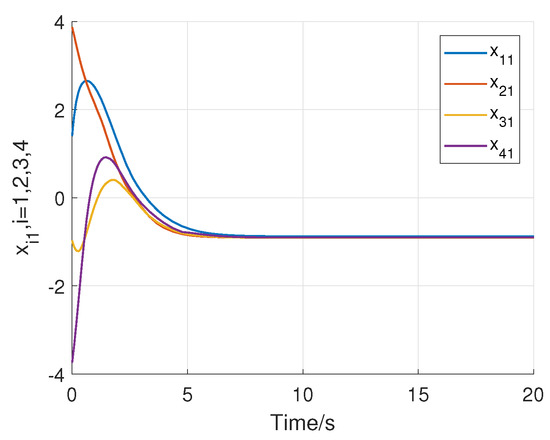
Figure 2.
Trajectories of the state of the controlled fractional-order agents.
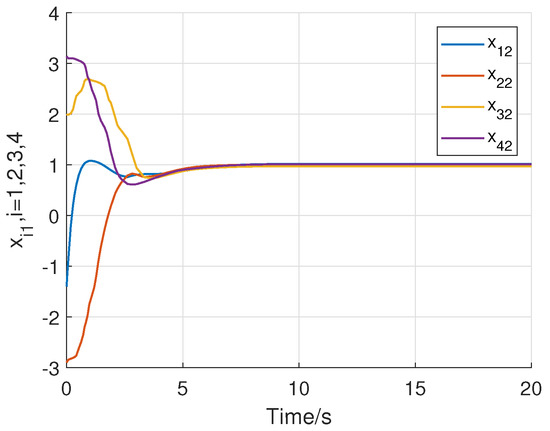
Figure 3.
Trajectories of the state of the controlled fractional-order agents.
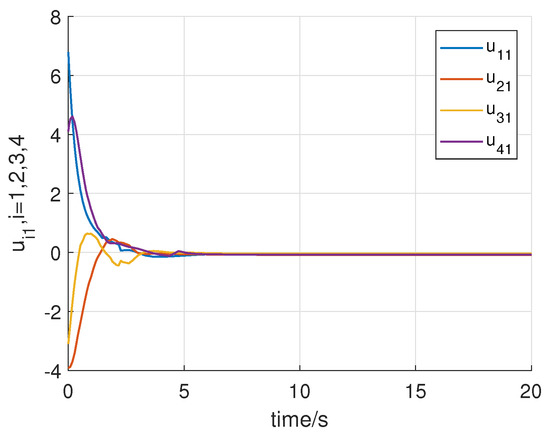
Figure 4.
Trajectories of the input signals .
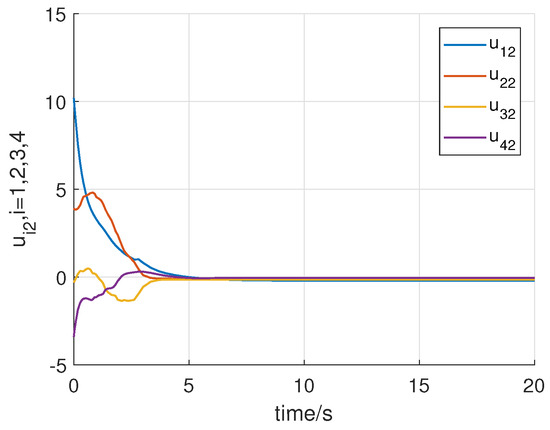
Figure 5.
Trajectories of the input signals .
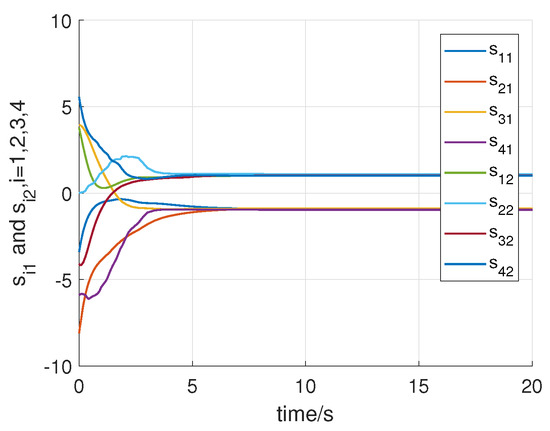
Figure 6.
Trajectories of the sliding surface .
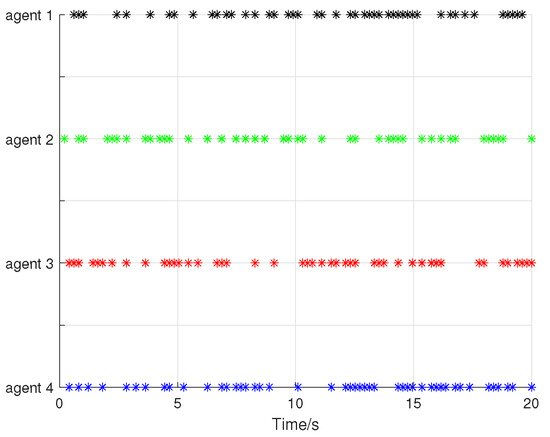
Figure 7.
The release instants and release interval.
Let . It is easy to verify that conditions (51) and (52) are satisfied, which implies that Theorem 3 holds. Therefore, The event-triggered sliding mode control laws (21) and (28) with the adaptive law (29) are applied to guarantee that states of all agents converge to some bounded constant.
Consider the following initial states of the system: for , . Using the above initial conditions and system controller parameters, the numerical simulation results are shown in Figure 8, Figure 9, Figure 10, Figure 11, Figure 12, Figure 13 and Figure 14. Figure 8 and Figure 9 show that all states of the controlled fractional-order agents are bounded and converge to and 1, respectively. Nevertheless, the event-triggered sliding mode control law with the adaptive law (29) converge faster than the without the adaptive law by comparing with the Case 1. Similarly, Figure 10, Figure 11 and Figure 12 show that all control inputs and the adaptive paremeter are bounded. Sliding mode surfaces for agent are presented in Figure 13. The event release instants and release intervals are given in Figure 14.
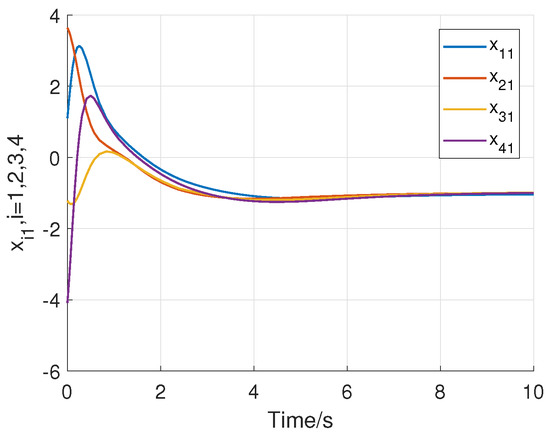
Figure 8.
Trajectories of the state of the controlled fractional-order agents with the adaptive law (29).
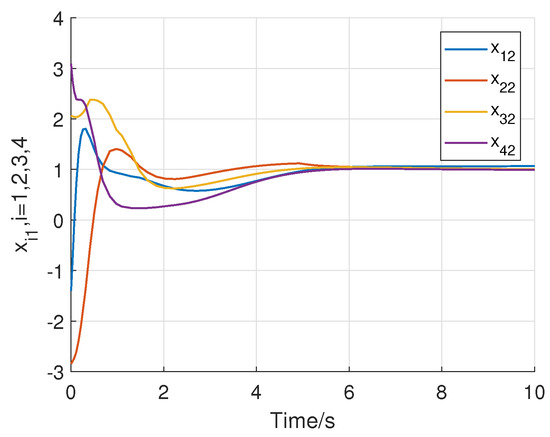
Figure 9.
Trajectories of the state of the controlled fractional-order agents with the adaptive law (29).
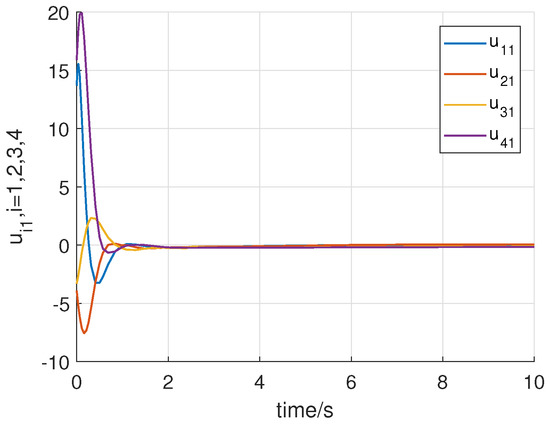
Figure 10.
Trajectories of the control input with the adaptive law (29).
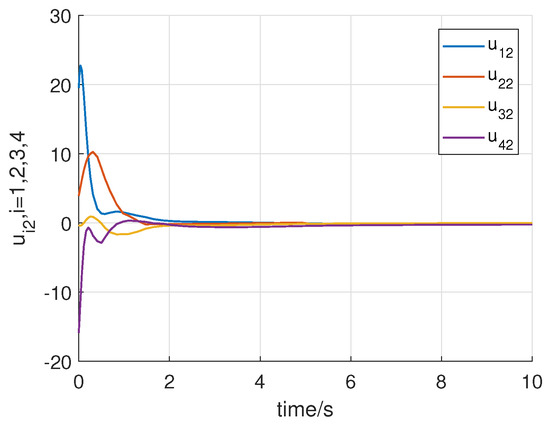
Figure 11.
Trajectories of the control input with the adaptive law (29).
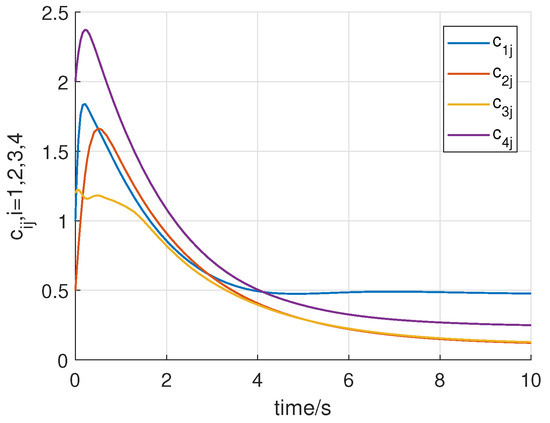
Figure 12.
Trajectories of the adaptive law (29).
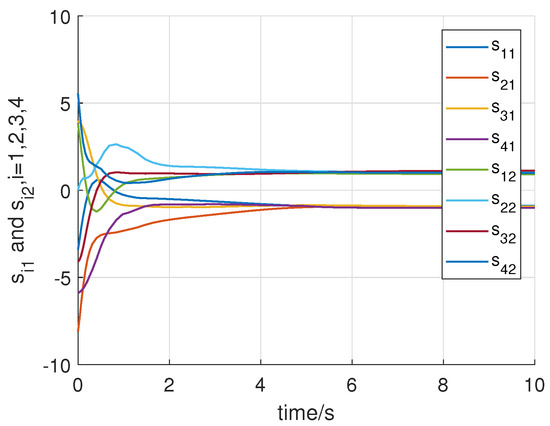
Figure 13.
Trajectories of the sliding surface .
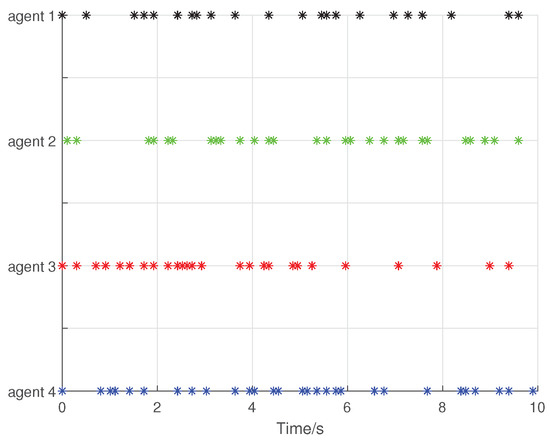
Figure 14.
The release instants and release interval.
5. Conclusions
In this study, the state consensus problem of the nonlinear FOMASs has been addressed by using the dynamic event-triggered sliding mode control method. To solve this problem, a novel framework of event-triggered sliding mode control has been proposed, composed of event-triggered sliding mode controllers and auxiliary switching functions. In addition, the asymptotic consensus property and Zeno-free behavior are guaranteed simultaneously. Then, the network occupation has been reduced and distributed event-triggered sliding mode controllers without real-time information of agent have been designed to confine the state trajectories of all agents to the sliding region. Meantime, an auxiliary distributed switching functions have removed the requirements of continuous states among agents, and the stability of closed-loop FOMASs has been established by the Lyapunov theory. Finally, the application of the proposed method to a numerical example has been developed.
In the future, the problem of dynamic self-triggered sliding mode control for more complex nonlinear systems. For example, in the case of dynamic self-triggered sliding mode control under switching structure situations, the asymptotic stability and Zero-free behavior aspects of such issues are difficult to demonstrate, because of the difficulty of the switching structure analysis.
Author Contributions
These authors contributed equally to this work. Conceptualization, Y.J. and H.L.; Data curation, G.L.; Formal analysis, Y.X., G.L., and H.L.; Funding acquisition, Y.J.; Investigation, G.L. and H.L.; Methodology, H.L.; Project administration, H.L.; Resources, G.L. and H.L.; Software, Y.J. and H.L.; Supervision, G.L.; Validation, Y.J. and H.L.; Visualization, Y.X.; Writing—original draft, Y.J. and Z.J.; Writing—review and editing, Y.X. and and Z.J. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the Science and Technology Research Project of Henan Province No. 212102210046, Training Plan for Young Key Teachers in Colleges and Universities of Henan Province, Project No. 2021GGJS180.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no confilct of interest.
References
- Sun, T.; Liu, H.; Yao, Y.; Li, T.; Cheng, Z. Distributed adaptive formation tracking control under fixed and switching topologies: Application on general linear multi-agent systems. Symmetry 2020, 16, 941. [Google Scholar] [CrossRef]
- Hong, Y.G.; Hu, J.; Gao, L. Tracking control for multi-agent consensus with an active leader and variable topology. Automatica 2006, 42, 1177–1182. [Google Scholar] [CrossRef]
- Wang, X.L.; Hong, Y.G.; Huang, J.; Jiang, Z.-P. A distributed control approach to robust output regulation of networked linear systems. IEEE Trans. Autom. Control. 2010, 55, 2891–2895. [Google Scholar] [CrossRef]
- Sharf, M.; Zelazo, D. Analysis and synthesis of MIMO multi-agent systems using network optimization. IEEE Trans. Autom. Control. 2019, 64, 4512–4524. [Google Scholar] [CrossRef]
- Jin, Z.H.; Wang, Z.X.; Zhang, X.F. Cooperative control problem of Takagi-Sugeno fuzzy multiagent systems via observer based distributed adaptive sliding mode control. J. Frankl. Inst. 2022, 359, 3405–3426. [Google Scholar] [CrossRef]
- Jin, X.Z.; Wang, S.F.; Qin, J.H.; Zheng, W.X.; Kang, Y. Adaptive fault-tolerant consensus for a class of uncertain nonlinear second-order multi-agent systems with circuit implementation. IEEE Trans. Circuits Syst. I Regul. Pap. 2018, 65, 2243–2255. [Google Scholar] [CrossRef]
- Lewis, F.L.; Cui, B.; Ma, T.; Song, Y.D.; Zhao, C.H. Heterogeneous multi-agent systems: Reduced-order synchronization and geometry. IEEE Trans. Autom. Control. 2016, 61, 1391–1396. [Google Scholar] [CrossRef]
- Jin, Z.H.; Qin, Z.Y.; Zhang, X.F.; Guan, C. A Leader-following consensus problem via a distributed observer and fuzzy input-to-output small-gain theorem. IEEE Trans. Control. Netw. Syst. 2022, 9, 62–74. [Google Scholar] [CrossRef]
- Rawad, A.; Sultan, A. A fast non-linear symmetry approach for guaranteed consensus in network of multi-agent systems. Symmetry 2020, 12, 1692. [Google Scholar]
- Mei, J.; Ren, W.; Li, B.; Ma, G.F. Distributed containment control for multiple unknown second-order nonlinear systems with application to networked Lagrangian systems. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 1885–1899. [Google Scholar] [CrossRef]
- Lu, M.; Huang, J. Cooperative global robust output regulation for a class of nonlinear multi-agent systems with a nonlinear leader. IEEE Trans. Autom. Control. 2016, 61, 3557–3562. [Google Scholar] [CrossRef]
- Liu, J.; Liu, D.Y.; Boutat, D.; Zhang, X.F.; Wu, Z.H. Innovative non-asymptotic and robust estimation method using auxiliary modulating dynamical systems. Automatica 2023, 152, 110953. [Google Scholar] [CrossRef]
- Zhang, H.; Lewis, F.L. Adaptive cooperative tracking control of higher-order nonlinear systems with unknown dynamics. Automatica 2012, 48, 1432–1439. [Google Scholar] [CrossRef]
- Su, H.S.; Chen, G.R.; Wang, X.F.; Lin, Z.L. Adaptive second-order consensus of networked mobile agents with nonlinear dynamics. Automatica 2011, 47, 368–375. [Google Scholar] [CrossRef]
- Jin, Z.H.; Wang, Z.X. Input-to-state stability of the nonlinear singular systems via small-gain theorem. Appl. Math. Comput. 2021, 402, 126171. [Google Scholar] [CrossRef]
- Jin, Z.H.; Wang, Z.X.; Li, J.W. Input-to-state stability of the nonlinear fuzzy systems via small-gain theorem and decentralized sliding-mode control. IEEE Trans. Fuzzy Syst. 2022, 30, 2993–3008. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, Z.H.; Zhang, Q.L. Impulse elimination of the Takagi–Sugeno fuzzy singular system via sliding-mode control. IEEE Trans. Fuzzy Syst. 2022, 30, 1164–1174. [Google Scholar] [CrossRef]
- Zhang, J.-X.; Yang, G.-H. Robust adaptive fault-tolerant control for a class of unknown nonlinear systems. IEEE Trans. Ind. Electron. 2017, 64, 585–594. [Google Scholar] [CrossRef]
- Lu, Y.; Liao, F.; Deng, J.; Pattinson, C. Cooperative optimal preview tracking for linear descriptor multi-agent systems. J. Frankl. Inst. 2019, 356, 908–934. [Google Scholar] [CrossRef]
- Cao, Y.; Li, Y.; Ren, W.; Chen, Y. Distributed coordination of networked fractional-order systems. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2009, 40, 362–370. [Google Scholar]
- Akram, T.; Abbas, M.; Ali, A.; Iqbal, A.; Baleanu, D. A numerical approach of a time fractional reaction–diffusion model with a non-singular kernel. Symmetry 2020, 12, 1653. [Google Scholar] [CrossRef]
- Zhang, X.F. Relationship between integer order systems and fractional order systems and its two applications. IEEE-CAA J. Autom. Sin. 2018, 5, 539–643. [Google Scholar] [CrossRef]
- Yan, H.; Zhang, J.X.; Zhang, X.F. Injected infrared and visible image fusion via L1 decomposition model and guided filtering. IEEE Trans. Comput. Imaging 2022, 8, 162–173. [Google Scholar] [CrossRef]
- Trigeassou, J.; Maamri, N.; Sabatier, J.; Oustaloup, A. A Lyapunov approach to the stability of fractional differential equations. Signal Process. 2011, 91, 437–445. [Google Scholar] [CrossRef]
- Li, C.P.; Zhang, F.R. A survey on the stability of fractional differential equations. Eur. Phys. J. Spec. Top. 2011, 193, 27–47. [Google Scholar] [CrossRef]
- Gallegos, J.; Duarte-Mermoud, M. On the Lyapunov theory for fractional order systems. Appl. Math. Comput. 2016, 287, 161–170. [Google Scholar] [CrossRef]
- Zhang, X.F.; Boutat, D.; Liu, D.Y. Applications of fractional operator in image processing and stability of control systems. Fractal Fract 2023, 7, 359. [Google Scholar] [CrossRef]
- Shen, J.W.; Cao, J.D.; Lu, J.Q. Consensus of fractional-order systems with non-uniform input and communication delays. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2012, 226, 271–283. [Google Scholar] [CrossRef]
- Yin, X.X.; Hu, S.L. Consensus of fractional-order uncertain multi-agent systems based on output feedback. Asian J. Control. 2013, 15, 1538–1542. [Google Scholar] [CrossRef]
- Wang, J.W.; Xiong, X.H. A general fractional-order dynamical network: Synchronization behavior and state tuning. Chaos 2012, 22, 362–370. [Google Scholar] [CrossRef]
- Yu, Z.Y.; Jiang, H.J.; Hu, C. Leader-following consensus of fractional-order multi-agent systems under fixed topology. Neurocomputing 2015, 149, 613–620. [Google Scholar] [CrossRef]
- Yu, Z.Y.; Jiang, H.J.; Hu, C.; Yu, J. Leader-following consensus of fractional-order multi-agent systems via adaptive pinning control. Int. J. Control. 2015, 88, 1746–1756. [Google Scholar] [CrossRef]
- Chen, J.; Guan, Z.H.; Li, T.; Zhang, D.X.; Ge, M.F.; Zheng, D.F. Multiconsensus of fractional-order uncertain multi-agent systems. Neurocomputing 2015, 149, 698–705. [Google Scholar] [CrossRef]
- Chen, J.; Guan, Z.H.; Yang, C.; Li, T.; He, D.X.; Ge, M.F.; Zhang, X.H. Distributed containment control of fractional-order uncertain multi-agent systems. J. Frankl. Inst. 2016, 353, 1672–1688. [Google Scholar] [CrossRef]
- Ackermann, J.; Utkin, V. Sliding mode control design based on Ackermann’s formula. IEEE Trans. Autom. Control. 1998, 43, 234–237. [Google Scholar] [CrossRef]
- Niu, Y.; Ho, D.W.C.; Lam, J. Robust integral sliding mode control for uncertain stochastic systems with time-varying delay. Automatica 2005, 41, 873–880. [Google Scholar] [CrossRef]
- Jin, Z.H.; Li, J.W.; Wang, Z.X. Input-to-state stability and sliding mode control of the nonlinear singularly perturbed systems via trajectory-based small-gain theorem. Nonlinear Anal. Hybrid Syst. 2022, 44, 101175. [Google Scholar] [CrossRef]
- Kavikumar, R.; Kwon, O.-M.; Lee, S.-H.; Lee, S.; Sakthivel, R. Event-triggered input–output finite-time stabilization for IT2 fuzzy systems under deception attacks. IEEE Trans. Fuzzy Syst. 2023, 31, 1139–1151. [Google Scholar] [CrossRef]
- Kavikumar, R.; Kwon, O.-M.; Lee, S.-H. Input-output finite-time IT2 fuzzy dynamic sliding mode control for fractional-order nonlinear systems. Nonlinear Dyn. 2022, 108, 3745–3760. [Google Scholar] [CrossRef]
- Nair, R.R.; Behera, L.; Kumar, S. Event-triggered finite-time integral sliding mode controller for consensus-based formation of multirobot systems with disturbances. IEEE Trans. Control. Syst. Technol. 2019, 27, 39–47. [Google Scholar] [CrossRef]
- Wu, X.; Mu, X. New design on distributed event-based sliding mode controller for disturbed second-order multi-agent systems. IEEE Trans. Autom. Control. 2022, 67, 2590–2596. [Google Scholar] [CrossRef]
- Jeong, J.; Lim, Y.; Parivallal, A. An asymmetric Lyapunov-Krasovskii functional approach for event-triggered consensus of multi-agent systems with deception attacks. Appl. Math. Comput. 2023, 439, 127584. [Google Scholar] [CrossRef]
- Parivallal, A.; Sakthivel, R.; Wang, C. Guaranteed cost leaderless consensus for uncertain Markov jumping multi-agent systems. J. Exp. Theor. Artif. Intell. 2023, 35, 257–273. [Google Scholar] [CrossRef]
- Yao, D.; Li, H.; Lu, R.; Shi, Y. Distributed sliding-mode tracking control of second-order nonlinear multiagent systems: An event-triggered approach. IEEE Trans. Cybern. 2020, 50, 3892–3902. [Google Scholar] [CrossRef]
- Li, Z.T.; Gao, L.X.; Chen, W.H.; Xu, Y. Distributed adaptive cooperative tracking of uncertain nonlinear fractional-order multi-agent systems. IEEE/CAA J. Autom. Sin. 2020, 7, 292–300. [Google Scholar] [CrossRef]
- Liu, T.F.; Qin, Z.Y.; Hong, Y.G.; Jiang, Z.-P. Distributed optimization of nonlinear multi-agent systems: A small-gain approach. IEEE Trans. Autom. Control. 2022, 67, 676–691. [Google Scholar] [CrossRef]
- Jin, Z.H.; Sun, X.J.; Qin, Z.Y.; Ahn, C.K. Fuzzy small-gain approach for the distributed optimization of T-S fuzzy cyber–physical systems. IEEE Trans. Cybern. 2022. Early Access. [Google Scholar] [CrossRef] [PubMed]
- Jin, Z.H.; Ahn, C.K.; Li, J.W. Momentum-based distributed continuous-time nonconvex optimization of nonlinear multi-agent systems via timescale separation. IEEE Trans. Netw. Sci. Eng. 2022, 10, 980–989. [Google Scholar] [CrossRef]
- Li, R.C.; Zhang, X.F. Adaptive sliding mode observer design for a class of T–S fuzzy descriptor fractional order systems. IEEE Trans. Fuzzy Syst. 2019, 28, 1951–1960. [Google Scholar] [CrossRef]
- Yang, X.J.; Li, C.D.; Song, Q.K.; Chen, J.Y.; Huang, J.J. Input-to-state stability of the nonlinear fuzzy systems via small-gain theorem and decentralized sliding-mode control. IEEE Trans. Cybern. 2018, 105, 88–103. [Google Scholar]
- Song, Q.; Liu, F.; Cao, J.D.; Yu, W.W. Pinning-controllability analysis of complex networks: An M-matrix approach. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 2692–2701. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, J. A Zeno-free event-triggered control strategy for asymptotic stabilization of switched affine systems. IEEE Trans. Autom. Control 2022, 67, 5509–5516. [Google Scholar] [CrossRef]
- Ye, Y.; Su, H.; Chen, J.; Peng, Y. Consensus in Fractional-Order Multi-Agent Systems With Intermittence Sampled Data Over Directed Networks. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 365–369. [Google Scholar] [CrossRef]
- Yang, H.; Wang, F.; Han, F. Containment Control of Fractional Order Multi-Agent Systems With Time Delays. IEEE/CAA J. Autom. Sin. 2018, 5, 727–732. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).