Abstract
In this paper, we propose an efficient viscosity type subgradient extragradient algorithm for solving pseudomonotone variational inequality on Hadamard manifolds which is of symmetrical characteristic. Under suitable conditions, we obtain the convergence of the iteration sequence generated by the proposed algorithm to a solution of a pseudomonotone variational inequality on Hadamard manifolds. We also employ our main result to solve a constrained convex minimization problem and present a numerical experiment to illustrate the asymptotic behavior of the algorithm. Our results develop and improve some recent results.
1. Introduction
Let be a non-empty closed and convex subset of a real Hilbert space with inner product and be an operator from to . The variational inequality problem (in short, VIP) is to find a point such that
VIP is an important problem of nonlinear analysis fields since many problems appear in these fields, such as the optimization problem, equilibrium and complementarity problem, and so on [1,2,3,4,5,6,7,8,9,10,11]. These may be translated into variational inequality problems. So, some researchers have focused on how to obtain the approximate solutions of the VIP (1) in the spaces with linear constructure and symmetrical characteristic, and have also proposed various iterative methods; see, for example, ref. [12,13,14,15,16,17,18] and the reference therein.
In the last decade, many problems occurring in the field of nonlinear analysis have been extended from the spaces with linear structure and symmetry to the symmetric Hadamard manifolds without linear structure. The main advantages of these extensions are that non- convex problems and constrained problems in spaces with linear structure and symmetry may be transformed into convex problems and unconstrained problems on Hadamard manifolds without linear structure, respectively. So, many nonlinear problems on symmetric Hadamard manifolds have been attracted and studied by some authors, see for example [19,20,21,22,23,24,25,26,27,28,29] and the reference therein.
The following VIP on Hadamard manifolds was first considered by Németh [30] in 2003:
The author studied the existence of the solution for VIP (2) and provided a necessary and sufficient condition for a solution of an optimization problem in terms of VIP (2) on Hadamard manifolds; here, is a non-empty, closed, and geodesic convex subset of Hadamard manifold is a vector field from to , i.e., for each , and is the inverse of exponential map. The solution set of the VIP (2) is denoted by .
VIP (2) is an extension of VIP (1). In fact, the vector field reduces to the operator from into and VIP (2) reduces to VIP (1) when .
In 2005, Ferreira et al. [31] proposed an extragradient-type algorithm to solve single-valued monotone variational inequality on Hadamard manifolds. In 2012, in order to weaken the monotone assumption, Tang et al. [32,33] introduced Korpelevich’s method and the projection-type method to solve a pseudomonotone VIP (2). Furthermore, for solving non-monotone VIP (2), Ye and He [34] proposed a double projection algorithm to solve a quasi-monotone variational inequality problem in . Recently, Ansaril and Babu [35] proposed an Armijos type extragradient algorithm method to solve VIP (2), which does not require the monotonicity of the objective vector field on Hadamard manifolds.
Motivated and inspired by the works of Shehu et al. [16], Thong et al. [18], Ansaril et al. [35], Chen et al. [36] and the research in this direction, we propose a viscosity type subgradient-like method to solve the pseudomonotone VIP (2) on Hadamard manifolds. Here, the vector field is a Lipschitz continuous pseudomonotone operator, but the Lipschitz constant need not be known in advance. Under suitable conditions, we prove that the sequence generated by the proposed algorithm converges to a solution of pseudomonotone VIP (2) on Hadamard manifolds. We also give an application of our main result to a constrained convex minimization problem and a numerical experiment to illustrate the effectiveness and the asymptotical behavior of the algorithm proposed. It is worth noting that our results can be viewed as a generalization of the corresponding results in [16].
2. Preliminaries
Let be a finite dimensional differentiable manifold and be a tangent space of at , be the tangent bundle of . An inner product on is said to be a Riemannian metric on . The norm induced by the inner product on is denoted by ; the subscript is omitted. A differentiable manifold with a Riemannian metric is called a Riemannian manifold. Let and be a piecewise smooth curve connecting with (i.e., and ). The length of the curve is defined by the Riemannian distance is the minimum length of all such curves connecting with . A Riemannian manifold equipped with Riemannian distance d is a metric space .
A Riemannian manifold is complete if for every , all geodesics starting from are defined for all . It has been shown in [37] that there exists only one minimal geodesic for any two points in and is complete metric space when is complete. A complete simply connected Riemannian manifold of nonpositive sectional curvature is called a Hadamard manifold.
Suppose that is a complete Riemannian manifold; then, the exponential map at is defined by
where is the unique geodesic starting from with velocity v. It is well known that the mapping is diffeomorphism on for any . The exponential mapping owns the inverse . Furthermore, for any , the equalities hold. See [37].
The parallel transport on the tangent bundle along : with respect to Riemannian connection ∇ is defined as:
where is the unique vector field such that for all and . When is the minimal geodesic joining to , we write instead of . Moreover, . For further details, refer to [38]. Note that is an isometry from to . That is, the parallel transport preserves the inner product
Definition 1
([33,39]). Let be a set of all single-valued vector fields from into satisfying for each and be the domain of , which is defined by . A single-valued vector field is said to be
- (i)
- Monotone if
- (ii)
- Pseudomonotone if
- (iii)
- Lipschitz continuous if there exists a constant such that
Lemma 1
([40]). If is a geodesic triangle in a Hadamard manifold , then there exist such that
The triangle is called a comparison triangle of geodesic-triangle , which is unique up to the isometry of .
Lemma 2
([41]). Let be a geodesic triangle in a Hadamard manifold be a its comparison triangle.
- (i)
- Suppose that (resp., are the angles of (resp., at the vertices (resp., ; then, the following inequalities hold:
- (ii)
- Suppose that is a point on the geodesic connecting with and is its comparison point in the interval , if and ; then,
Lemma 3
([37]). Let be a geodesic triangle in a Hadamard manifold. For each , denotes the geodesic joining to , and set , and . Then,
- (i)
- ;
- (ii)
- ;
- (iii)
- .
As in [25], the above inequalities (i), (ii), (iii) can be rewritten in the form of the Riemann distance and the exponential map as follows:
and
Since
in (5), let ; we have
Lemma 4
([42]). Let be a finite dimensional Hadamard manifold.
- (i)
- If is a geodesic joining to , then,
- (ii)
- For any and , the following inequalities hold:
Lemma 5
([41]). Suppose that and satisfying , ; then, the following results hold.
- (i)
- , for any , respectively;
- (ii)
- If is a sequence in and , then ;
- (iii)
- If the sequences and satisfy , and , then
Let be a Hadamard manifold. A subset is said to be geodesic convex if for any two points and in , the geodesic joining to is contained in , which means that for all , where is a geodesic satisfing and .
Lemma 6
([43]). Let be a Riemannian manifold with constant curvature. For given and , the set
is geodesic convex.
A function is said to be geodesic convex if, for any geodesic joining , the function is convex, that is,
Let be a non-empty, closed, and geodesic convex subset of a Hadamard manifold . The metric projection onto , denoted by , is defined as
Lemma 7
([39]). Let be a non-empty, closed geodesic convex subset of a Hadamard manifold . Then, for any is a singleton, and the following inequality holds:
Lemma 8
([32]). Let be a non-empty, closed, and geodesic convex subset of a Hadamard manifold and be a single-valued vector field. For each , the following statements are equivalent:
- (i)
- is a solution of VIP (2);
- (ii)
- for all ;
- (iii)
- , where is defined by .
Lemma 9
([44]). Let be a sequence of nonnegative real numbers such that there exists a subsequence of such that for all . Then, there exists a nondecreasing sequence such that and the following properties are satisfied by all (sufficiently large) number : and . In fact, is the largest number n in the set such that .
Lemma 10
([45]). Let be a sequence of nonnegative real numbers satisfying the following inequality:
If (i) ; (ii) ; (iii) , then as .
3. Main Results
In this section, we need to make the following assumptions before we propose our algorithm:
(C1) is a non-empty closed geodesic convex subset of a finite dimensional Hadamard manifold ;
(C2) Mapping is a single valued vector field, that is, for each ;
(C3) Vector field is pseudomonotone and L-Lipschitz continuous on ;
(C4) The solution set of the VIP (2) is non-empty;
(C5) Mapping is a contraction mapping with constant .
Remark 1.
It is worth noting that conditions (C1)–(C5) are popular assumptions both in Hadamard manifold and in Hilbert space. These conditions are applicable to problems from practical scenarios such as the linear equations due to image restorations and the Kojima–Shindo nonlinear complementary problem. For further real-world applications, refer to the complementary problems discussed in [46,47,48].
Lemma 11.
The Armijo-like search rule (9) is well defined and
Proof.
Since is L-Lipschitz continuous on , we obtain
Due to and , we have Therefore, (9) holds for all , so is well defined.
If , then this Lemma is proved; otherwise, if , we know by the search rule (9) that does not satisfy the inequality (9), that is
Consider that is L-Lipschitz continuous on , we have . The proof is completed. □
Theorem 1.
Assume that the assumptions hold. If satisfies and , then the sequence generated by Algorithm 1 converges to a solution of pseudomonotone VIP (2).
| Algorithm 1: Viscosity type subgradient extragradient algorithm on Hadamard manifolds |
|
Proof.
Step 1. Now, we show that the sequences , , and are bounded.
It follows from Lemma 5, Lemma 6, and the definition of that is closed and geodesic convex and . Furthermore, by the pseudomonotonicity of , we have .
Let , be a geodesic triangle, and be its comparison triangle. By Lemma 1, we obtain
By (ii) of Lemma 2 and Lemma 7, we obtain
where
This implies that
Substituting (15) into (13), from (6), we have
Since and , we have . By the pseudomonotonicity of vector field , from Definition 1, we obtain that . So,
From (16) and (17), we obtain
By the definition of , we know
It follows from Lemma 11, (6), (18), and (19) that
This implies that
So,
which means that is bounded. So, , are also bounded.
Step 2. Next, we prove that for any , the following inequality holds.
It follows from Lemma 4 and (20) that
This implies that
Step 3. Finally, we show that converges to some point , where .
Let , be a geodesic triangle and be its comparison triangle. From (10), we know that the comparison point of is . It follows from Lemma 1 that
which implies that
The rest of the proof will be divided into two cases.
Case 1. Suppose that there exists such that is nonincreasing. Then, is convergent. It follows from (24) that
Similarly, from (20), (21), and (27), we have
Hence,
From Lemma 4 and (10), we have
So,
It follows from (27), (29), (30), and (31) that
Since is bounded, there exists a subsequence of such that converges to some . From Lemma 5, we have
Now, we show that . In fact, by (27) we know that converges to .
Since , by Lemma 7, for all , we have
By Lemma 3, the inequality above becomes
By Lemma 11, we know that . It follows from Lemma 5 that
So, we have . Since , from (33), we obtain
It follows from (32) that
Since , , , and is bounded, it is obvious that , , and . Due to the inequality (26) holding for any , it follows from Lemma 10, (26), and (35) that , which implies that the sequence converges to .
Case 2. Assume that is not a monotonically decreasing sequence.
It follows from Lemma 9 that there exists a nondecreasing sequence of such that and the following inequalities hold for all :
From (24), we have
So, we have
Using the same arguments as in the proof of Case 1, we obtain
and
Since , there exists such that for all . By Equation (25) we obtain
Put , from (37) and (44); we have
Further,
which means that
Therefore,
Meanwhile, it follows from (43), (45) and (47) that . Hence,
Further, from (37) we obtain
Hence, converges to . The proof is completed. □
If , for any , and u is a fixed vector in , then Theorem 1 reduces to the following corollary.
Corollary 1.
Assume that the assumptions hold, and , , . Then, the sequence generated by Algorithm 1 with converges to a solution of VIP (2).
Remark 2.
- 1.
- The main results obtained in this paper extend the main results in [16] from monotone VIP (1) on Hilbert spaces to more general pseudomonotone VIP (2) on Hadamard manifolds.
- 2.
- In the algorithms proposed in [49,50], they are needed to compute two projections on the closed convex set at each iteration step, which may affect the efficiency of the algorithm. To avoid this shortcoming, we use an easy calculated projection to replace the second projection in the algorithms in [49,50].
- 3.
- In Algorithm 1, it works without prior knowledge of the Lipschitzian constant of the mapping involved.
- 4.
- The generalization was made from the Hilbert spaces with linear structure to the Hadamard manifolds with nonlinear structure. See [16,49,50].
4. Application to Constrained Convex Minimization Problem
The so-called constrained convex minimization problem is to find such that
where is a non-empty, closed, and geodesic convex subset of a Hadamard manifold and g is a real-valued function from to ; the solution set of the convex minimization problem (51) is denoted by , that is,
The gradient of a differentiable real-valued function at is defined by where is a Hadamard manifold; is the directional derivative of g at in the direction , which is defined as follows:
It is well known that is a continuous vector field on (see [37]).
Lemma 12
([30]). Let be a non-empty, closed, and geodesic convex subset of a Hadamard manifold and g be a differentiable convex function from to . Then, , if and only if solves the VIP with .
When the vector field in Algorithm 1, the sequence generated by Algorithm 1 converges to a solution of the minimization problem (51). So, we obtain the following result.
Theorem 2.
Assume that the assumptions hold, where is the gradient of a convex differentiable function g from into R. If , , , and is pseudomonotone and L-Lipschitz continuous, then the sequence generated by Algorithm 1 converges to a point .
Next, we will give a simple practical optimization case.
Electronics Supply Chain Inventory Optimization
An electronics retailer anticipates the launch of a new smartphone. Based on market analysis and pre-order data, the anticipated retail demand for the first month is 10,000 units. The current inventory level in the warehouse is 5000 units. The warehouse has a maximum capacity of 20,000 units. Given these parameters, the retailer aims to determine the optimal inventory level to stock up for the product launch.
Based on this problem, Algorithm 1 reduces to the following.
Based on the Algorithm 2, the new inventory level should be units. We choose the residual error . If the residual error is met, we stop the iteration. Otherwise, we continue with the next step.
| Algorithm 2: Iterative Inventory Optimization Algorithm |
|
In a word, the inventory levels at each iteration step are shown in Table 1. So, we can see that the residual error becomes smaller and smaller when the number of iterations increases, which indicates that the iteration scheme is convergent.

Table 1.
Result of iterations.
5. A Numerical Example
In this part, we provide a numerical example to illustrate the effectiveness and the convergence behavior of Algorithm 1. All codes were written with MATLAB 2020b computed on a Personal Computer (PC) Core i7.
Let and the set of positive real numbers and the Riemannian manifold, and let be the tangent space at , then
(i) the Riemannian metric is defined by
(ii) (see [51]) The Riemann distance is defined by
Furthermore, the unique geodesic with is defined by . Thus
(iii) The inverse exponential map is defined by
Example 1.
Let be a geodesic convex subset of and be a single-valued vector field defined by
Then, it is easy to see that is pseudomonotone. Indeed, let and assume , from (53), (56) and (57); we easily see that
which implies that . Since
So, is pseudomonotone. Now, we prove that . Assume that and , then
which implies that the solution of VIP (2) is 1.
Here, we choose , , , and take two randomly initial points . To show the effectiveness of Algorithm 1, we compare Algorithm 1 with the algorithm introduced in [36], which we named Algo*. In example 1, as = 0.5, the numbers of iteration of Algorithm 1 and Algo* are 23 and 28, respectively. As =8, the numbers of iteration of Algorithm 1 and Algo* are 297 and 350, respectively. We summarize the numerical experimental data in the Figure 1a–d, where Figure 1a,b illustrates the asymptotic behaviors of Algorithm 1 and Algo*. It can be seen that Algorithm 1 converges faster and owns better asymptotic behavior than Algo*. On the other hand, from Figure 1c,d, we may find that the residual error of Algorithm 1 is less than the residual error of Algo*.
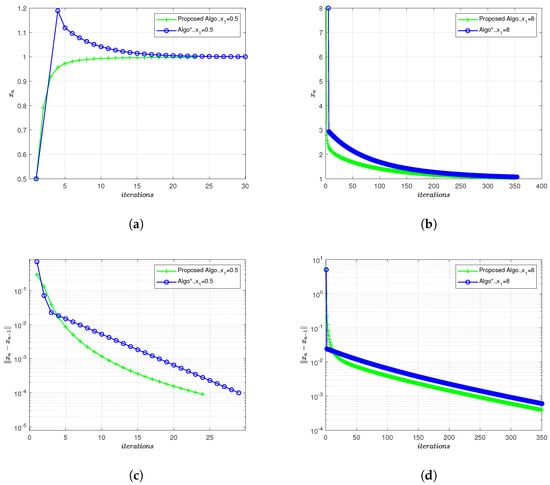
Figure 1.
Comparison of Algorithms for Example 1. (a) The number of iterations; (b) The number of iterations; (c) Comparison of the residual error with ; (d) Comparison of the residual error with .
6. Conclusions
In this paper, we proposed an efficient viscosity type subgradient extragradient algorithm to solve pseudomonotone variational inequality on Hadamard manifolds which is of symmetrical characteristic. Notably, the vector field is characterized as a Lipschitz continuous pseudomonotone operator, with the advantage that its Lipschitz constant need not be predetermined. Under appropriate conditions, we prove that the sequence generated by the Algorithm 1 converges to a solution of the pseudomonotone VIP on Hadamard manifolds. Furthermore, we utilize our main result to solve a constrained convex minimization problem and give a practical example for an inventory optimization problem in an electronic supply chain. In addition, we also provide a numerical experiment to demonstrate the asymptotic behavior of the algorithm. It is noteworthy that our results presented in this paper extend the main results of [16] from monotone VIP on Hilbert spaces to the more general pseudomonotone VIP on Hadamard manifolds. In our Algorithm 1, although it is necessary to compute two projections at each iteration step, one of the projections is easily computed since it is a projection on a half-plane, which replaces the second projection in the algorithms in [49,50]. In summary, our new results in this paper are original. It is worth mentioning that part of our future research will focus on achieving the convergence results for the modifications of our proposed algorithms with low computational cost and fast convergence speed.
Author Contributions
Conceptualization, Z.M. and L.W.; methodology, Z.M. and L.W.; software, Z.M.; writing—original draft preparation, Z.M. and L.W.; writing—review and editing, Z.M. and L.W.; funding acquisition, Z.M. and L.W. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by the National Natural Science Foundation of China grant number 12161088, and the Science Foundation of Education Department of Yunnan Province grant number 2022Y490.
Data Availability Statement
The data sets used and/or analysed during the current study are available from the corresponding author on reasonable request.
Acknowledgments
The authors would like to thank the editors and the anonymous referee for his/her comments which helped us improve this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Aubin, J.P.; Ekeland, I. Applied Nonlinear Analysis; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Baiocchi, C.; Capelo, A. Variational and Quasivariational Inequalities: Applications to free Boundary Problems; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Kinderlehrer, D.; Stampacchia, G. An Introduction to Variational Inequalities and Their Applications; Academic Press: New York, NY, USA, 1980. [Google Scholar]
- Hartman, P.; Stampacchia, G. On some non-linear elliptic diferential-functional equations. Acta Math. 1966, 115, 271–310. [Google Scholar] [CrossRef]
- Hieu, D.V. Parallel extragradient-proximal methods for split equilibrium problems. Math. Model. Anal. 2016, 21, 478–501. [Google Scholar] [CrossRef]
- Gibali, A.; Reich, S.; Zalas, R. Outer approximation methods for solving variational inequalities in Hilbert space. Optimization 2017, 66, 417–437. [Google Scholar] [CrossRef]
- Ullah, R.; Mdallal, Q.A.; Khan, T.; Ullah, R.; AlAlwan, B.; Faiz, F.; Zhu, Q.X. The dynamics of novel corona virus disease via stochastic epidemiological model with vaccination. Sci. Rep. 2023, 13, 3805. [Google Scholar] [CrossRef] [PubMed]
- Cholamjiak, W.; Suparatulatorn, R. Strong convergence of a modified extragradient algorithm to solve pseudomonotone equilibrium and application to classification of diabetes mellitus. Chaos Solitons Fractals 2023, 168, 113108. [Google Scholar] [CrossRef]
- Suantai, S.; Yajai, W.; Peeyada, P.; Cholamjiak, W.; Chachvarat, P. A modified inertial viscosity extragradient type method for equilibrium problems application to classification of diabetes mellitus:Machine learning methods. AIMS Math. 2022, 8, 1102–1126. [Google Scholar] [CrossRef]
- Suparatulatorna, R.; Cholamjiakb, W.; Jun-on, N. A modified subgradient extragradient method for equilibrium problems to predictprospective mathematics teachers’digital proficiency level. Res. Nonlinear Anal. 2023, 6, 1–18. [Google Scholar]
- Cholamjiak, W.; Dutta, H.; Yambangwai, D. Image restorations using an inertial parallel hybrid algorithm with Armijo linesearch-for nonmonotone equilibrium problems. Chaos Solitons Fractals 2021, 153, 111462. [Google Scholar] [CrossRef]
- Chang, X.K.; Liu, S.Y.; Zhao, P.J.; Song, D.J. A generalization of linearized alternating direction method of multipliers for solving two-block separable convex programming. J. Comput. Appl. Math. 2019, 357, 251–272. [Google Scholar] [CrossRef]
- Facchinei, F.; Pang, J.S. Finite-Dimensional Variational Inequalities and Complementarity Problems; Springer Series in Operations Research; Springer: New York, NY, USA, 2003; Volume II. [Google Scholar]
- Kinderlehrer, D.; Stampacchia, G. An Introduction to Variational Inequalities and Their Applications; Classics in applied mathematics; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 2000; Volume 31. [Google Scholar]
- Ahmad, R.; Ali, I.; Hussain, S.; Latif, A.; Wen, C.F. Generalized Implicit Set-Valued Variational Inclusion Problem with Operation. Mathematics 2019, 7, 421. [Google Scholar] [CrossRef]
- Shehu, Y.; Iyiola, O.S. Strong convergence result for monotone variational inequalities. Numer. Algor. 2017, 76, 259–282. [Google Scholar] [CrossRef]
- Shehu, Y.; Iyiola, O.S. Projection methods with alternating inertial steps for variational inequalities: Weak and linear convergence. Appl. Numer. Math. 2020, 157, 315–337. [Google Scholar] [CrossRef]
- Thong, D.V.; Hieu, D.V. Weak and strong convergence theorems for variational inequality problems. Numer. Algor. 2018, 78, 1045–1060. [Google Scholar] [CrossRef]
- Tian, M.; Xu, G. Improved inertial projection and contraction method for solving pseudomonotone variational inequality problems. J. Inequal. Appl. 2021, 2021, 107. [Google Scholar] [CrossRef]
- Farid, M.; Ali, R.; Cholamjiak, W. An inertial iterative algorithm to find common solution of a split generalized equilibrium and a variational inequality problem in hilbert spaces. J. Math. 2021, 2021, 3653807. [Google Scholar] [CrossRef]
- Ponkamon, K.; Watcharaporn, C.; Damrongsak, Y. An inertial parallel CQ subgradient extragradient method for variational inequalities application to signal-image recovery. Res. Nonlinear Anal. 2021, 4, 217–234. [Google Scholar]
- Suantaia, S.; Peeyadab, P.; Cholamjiakb, W.; Duttac, H. Image deblurring using a projective inertial parallel subgradient extragradient-line algorithm of variational inequality problems. Filomat 2022, 36, 423–437. [Google Scholar] [CrossRef]
- Olona, M.A.; Narain, O.K. Iterative method for solving finite families of variational inequality and Fixed Point Problems of certain multi-valued mappings. Nonlinear Funct. Anal. Appl. 2022, 27, 149–167. [Google Scholar]
- Abass, H.A.; Narain, O.K.; Onifade, O.M. Inertial extrapolation method for solving systems of monotone variational inclusion and fixed point problems using Bregman distance approach. Nonlinear Funct. Anal. Appl. 2023, 28, 497–520. [Google Scholar]
- Li, C.; López, G.; Martín-Márquez, V. Monotone vector fields and the proximal point algorithm on Hadamard manifolds. J. Lond. Math. Soc. 2009, 79, 663–683. [Google Scholar] [CrossRef]
- Ansari, Q.H.; Babu, F.; Li, X. Variational inclusion problems in Hadamard manifolds. J. Nonlinear Convex Anal. 2018, 19, 219–237. [Google Scholar]
- Al-Homidan, S.; Ansari, Q.H.; Babu, F. Halpern and Mann-type algorithms for fixed points and inclusion problems on Hadamard manifolds. Numer. Funct. Anal. Optim. 2019, 40, 621–653. [Google Scholar] [CrossRef]
- Chang, S.S.; Tang, J.F.; Wen, C.F. A new algorithm for monotone inclusion problems and fixed points on Hadamard manifolds with applications. Acta Math. Sci. 2021, 41, 1250–1262. [Google Scholar] [CrossRef]
- Liu, M.; Chang, S.S.; Zhu, J.H.; Tang, J.F.; Liu, X.D.; Xiao, Y.; Zhao, L.C. An iterative algorithm for finding a common solution of equilibrium problem, quasi-variational inclusion problem and fixed point on Hadamard manifolds. J. Nonlinear Convex Anal. 2021, 22, 69–86. [Google Scholar]
- Németh, S.Z. Variational inequalities on Hadamard manifolds. Nonlinear Anal. 2003, 52, 1491–1498. [Google Scholar] [CrossRef]
- Ferreira, O.P.; Pérez, L.R.L.; Németh, S.Z. Singularities of monotone vector fields and an extragradient-type algorithm. J. Glob. Optim. 2005, 31, 133–151. [Google Scholar] [CrossRef]
- Tang, G.J.; Huang, N.J. Korpelevich’s method for variational inequality problems on Hadamard manifolds. J. Glob. Optim. 2012, 54, 493–509. [Google Scholar] [CrossRef]
- Tang, G.J.; Wang, X.; Liu, H.W. A projection-type methodfor variational inequalities on Hadamard manifolds and verification of solution existence. Optimization 2015, 64, 1081–1096. [Google Scholar] [CrossRef]
- Ye, M.; He, Y. A double projection method for solving variational inequalities without monotonicity. Comput. Optim. Appl. 2015, 60, 141–150. [Google Scholar] [CrossRef]
- Ansaril, Q.H.; Babu, F. Extragradient-type Algorithm for Non-monotone Variational Inequalities on Hadamard Manifolds. Indian J. Ind. Appl. Math. 2020, 11, 118–137. [Google Scholar] [CrossRef]
- Chen, J.F.; Liu, S.Y.; Chang, X.K. Modified Tseng’s extragradient methods for variational inequality on Hadamard manifolds. Appl. Anal. 2021, 100, 2627–2640. [Google Scholar] [CrossRef]
- Sakai, T. Riemannian Geometry, Translations of Mathematical Monographs; American Mathematical Society: Providence, RI, USA, 1996. [Google Scholar]
- Carmo, M.P.D. Riemannian Geometry; Birkhauser: Boston, MA, USA; Basel, Switzerland; Berlin, Germany, 1992. [Google Scholar]
- Wang, J.H.; López, G.; Martín-Márquez, V.; Li, C. Monotone and accretive vector fields on Riemannian manifolds. J. Optim. Theory Appl. 2010, 146, 691–708. [Google Scholar] [CrossRef]
- Reich, S. Strong convergence theorems for resolvents of accretive operators in Banach spaces. J. Math. Anal. Appl. 1980, 75, 287–292. [Google Scholar] [CrossRef]
- Li, C.; Lopez, G.; Martín-Márquez, V. Iterative algorithms for nonexpansive mappings on Hadamard manifolds. Taiwan J. Math. 2010, 14, 541–559. [Google Scholar]
- Chang, S.S.; Yao, J.C.; Yang, L.; Wen, C.F.; Wu, D.P. Convergence Analysis for Variational Inclusion Problems Equilibrium Problems and Fixed Point in Hadamard Manifolds. Numer. Funct. Anal. Optim. 2021, 42, 567–582. [Google Scholar] [CrossRef]
- Ferreira, O.P.; Oliveira, P.R. Proximal point algorithm on Riemannian manifolds. Optimization 2002, 51, 257–270. [Google Scholar] [CrossRef]
- Maingé, P.E. A hybrid extragradient-viscosity method for monotone operators and fixed point problems. SIAM J. Control Optim. 2008, 47, 1499–1515. [Google Scholar] [CrossRef]
- Xu, H.K. Iterative algorithm for nonlinear operators. J. Lond. Math. Soc. 2002, 66, 1–17. [Google Scholar] [CrossRef]
- Harker, P.T.; Pang, J.-S. A damped-newton method for the linear complementarity problem. Lect. Appl. Math. 1990, 66, 265–284. [Google Scholar]
- Kanzow, C. Some equation-based methods for the nonlinear complemantarity problem. Optim. Methods Softw. 1994, 3, 327–340. [Google Scholar] [CrossRef]
- Pang, J.-S.; Gabriel, S.A. NE/SQP: A robust algorithm for the nonlinear complementarity problem. Math. Program. 1993, 60, 295–337. [Google Scholar] [CrossRef]
- Korpelevich, G.M. The extragradient method for finding saddle points and other problems. Ekonom. Mat. Metody. 1976, 12, 747–756. [Google Scholar]
- Tseng, P. A modified forward-backward splitting method for maximal monotone mappings. SIAM J. Control Optim. 2000, 38, 431–446. [Google Scholar] [CrossRef]
- Bento, G.C.; Ferreira, O.P.; Oliveira, P.R. Proximal point method for a special class of nonconvex functions on Hadamard manifolds. Optimization 2012, 64, 289–319. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).