Abstract
The challenge of developing observers for classical integer-order systems that are both resilient and non-fragile has received a lot of attention in the literature. However, only a few articles have addressed the topic of developing observers for Fractional-Order (FO) systems that are both H-infinity and non-fragile. The current work handles the Caputo fractional-order systems as the first work, to our knowledge, which treats such problems. The authors provide a novel result for building non-fragile and robust observers for nonlinear Caputo fractional-order systems. For this, the performance method is utilized. Simulations for a numerical example confirm the efficacy of the suggested technique. The primary advantage of the current work is that it is the first to address the Caputo fractional-order system problem.
1. Introduction
A Fractional-Order System (FOS) is one among nonlinear systems that may be characterized utilizing a non-integer derivative [1]. Such systems are referred to as fractional dynamics. Derivatives and integrals of fractional-order systems are utilized to depict events that may be investigated in a variety of ways, for example, power-law long-range dependence, power-law nonlocality [2], or fractal features. Many areas, including biology, physics, viscoelasticity, electrochemistry, and chaotic systems, have employed fractional-order calculus to explore system dynamics [1]. In recent decades, advances in science, mathematics [3], and engineering have boosted the use of fractional calculus in many areas of control theory, such as stability [4], finite-time stability (FTS) [5], stabilization [6], observer design, and fault estimation [7].
In systems engineering, observers are the crucial component for generating system states, either totally (complete observers) or substantially (reduced-order observers). Researchers have utilized these structures for additional reasons besides predicting states, such as identifying defects [8] and solving control issues [8,9]. Typically, data from real-world applications have two types of distributions: symmetric and asymmetric. For instance, social networks and protein networks frequently exhibit symmetric relationships. In other words, there is a clear asymmetry between the probability distributions of accidents and typical scenarios in traffic statistics. Consequently, it is necessary to examine symmetry and asymmetry issues while analyzing incomplete huge data. By removing physical sensors and replacing them with software sensors, the inclusion of the observer in symmetric and asymmetric distributions may minimize the complexity of networks and improve the efficiency of certain calculations. In this situation, the usage of observers can be a useful tool for resolving several issues, for example [10,11].
On the other hand, a state observer is used to rebuild the states of a dynamic system and has numerous essential applications, including feedback control implementation, system supervision, gas-fired furnace systems, and fault detection. A notion for non-fragile control is presented as a solution to the dilemma of how to build a feedback control that is insensitive to errors in its gains. The relevance of this method relative to others lies in the fact that the error system has a higher margin of stability than the classical system, allowing the observer to achieve favorable performance. It should be noted that spectators come in a variety of shapes and sizes. Non-fragile observers are one of these categories, and they have a positive impact on performance. The estimation is non-fragile if the error does not diverge when the observer gain is affected by an external disturbing element. Alternatively, whenever the system under investigation includes a perturbation vector, the design of the observer is ineffective at quickly reconstructing the states, mandating the use of special techniques. The observer is one of these approaches.
and/or non-fragile approaches for classical systems have been a topic of considerable research for decades. The construction of such methods for delayed time—variant switching systems was the subject of [12]. Another work [13] focuses on developing an observer-based control which is non-fragile. On the other hand, the authors proposed in [14] a sliding mode discrete time-delay observer. Subsequently in [15], for linear systems with unknown inputs, certain experts developed an integrated observer. A further noteworthy article [16] offered a observer technique for linear parameter varying systems with uncertainties and validated their findings for a battery-powered wheeled vehicle.
It is worth noting that integer-order calculation is inadequate for examining a wide array of different systems whose behaviors are better described by fractional order. Fractional-order calculus, for example, has been effectively used to simulate electrochemical systems [17] and heat transfer systems [18]. In a related vein, in recent years, the application of fractional-order equations in stability theory has increased dramatically [19,20]. For fractional-order systems, dealing with non-fragility and/or observer development is a significant topic of inquiry compared to the integer-order situation. In fact, scholars have only published a few papers in this area. Furthermore, only a few publications have addressed the problem of constructing observers for fractional-order systems that are both and non-fragile [21,22].
This approach estimates the states of nonlinear fractional-order systems using the Caputo derivative. The results are surprising. It is possible to employ the non-fragile observer framework in an effort to allow a system-modeling approach adaptable to possible observer gain in an input disturbance-free and input disturbance-dependent scenario, included in a generalized theorem. An performance is supplied when the system description incorporates unknown input disturbances, and the observer is demonstrated to properly predict the states.
Based on the above discussions, the novelty and implications of this research can be listed as follows.
- As stated above, only a few papers have addressed the issue of designing and non-fragile observers for FO systems. The key benefit of the current study is that it is the first to address the problem of the Caputo fractional-order system.
- The suggested strategy exploits a variety of mathematical properties and unique situations. The authors feel that this increases the value and significance of the current work.
The rest of the paper is generally divided into three categories. Preliminaries and fundamental principles of the FO calculus are provided in Section 2. The paper’s core challenge is then mathematically stated. The non-fragile state estimate technique is shown in Section 3. The disturbance-free as well as the disturbance-dependent cases are also discussed. Finally, in Section 4, a numerical simulation investigation is carried out to corroborate the findings.
2. Some Preliminaries and a Description of the Problem
2.1. Preliminaries
This section reviews numerous essential concepts and lemmas in fractional calculus. We begin with the following definition of the fractional integral of Riemann–Liouville.
Definition 1 ([1]).
Let us say that we have. A fractional integral of Riemann–Liouville of a function with order is described this way:
A generalizing factorial for non-integer parameters is represented by the Gamma function.
The Caputo fractional derivative is defined as follows:
Definition 2 ([1]).
For
an absolutely continuous function and , the Caputo fractional derivative is defined as:
The definition that follows describes a commonly used function in the solution of fractional-order problems. This function may be thought of as a broadening of the exponential function.
Definition 3 describes the Mittag-Leffler function.
Definition 3 ([1]).
The two-parameter Mittag-Leffler function is given as:
with,,. When, one has; in addition,.
In what follows, an important Lemma is used to demonstrate the stability of fractional-order systems.
Lemma 1 ([23]).
Let
be a constant symmetric and positive definite matrix and
. As a result, the following link exists:
The authors use a Caputo derivative order to solve a system of fractional differential equations when :
where , is a smooth nonlinear function such that we have the existence and uniqueness of the global solution, and is supposed to satisfy for every .
The following theorem is essential for the Mittag-Leffler global stability of Caputo fractional order systems.
Theorem 1 ([24]).
Assume that
is the equilibrium of system (1):
Assume that
is locally Lipschitz with respect to and a continuously differentiable function and such that:
where , , , and , , , and consist of arbitrarily positive numbers. Then, is globally Mittag-Leffler stable.
The below Lemma is used as a tool for the proof of the main results, named the Schur complement Lemma.
Lemma 2 ([25]).
Consider a set of constant matrices , and, of appropriate dimensions, where
andare symmetric, then:
2.2. Problem Statement
Consider the following nonlinear Caputo fractional-order system with :
where is an input disturbance vector, is the output vector, is the state vector. are two known constant matrices and is the nonlinearity in system (2). The input disturbance is considered such that the following condition (3) is satisfied:
Define the non-fragile Caputo fractional-order observer, given by (4):
where is the observer gain matrix, is the output vector estimation, is the state estimate vector, and the term denotes a supplementary perturbation on the gain of the observer. Let be the estimation error. The following formula therefore governs the error dynamics:
where . The authors define the performance metric for system (5), given a positive scalar, as:
where is a positive constant.
To proceed with the development of the main result, we define the performance criteria by the following definition.
Definition 4.
System (5) is Mittag-Leffler stable under anperformance, if it is Mittag-Leffler stable as long as, as well as fulfilling, when the initial condition equals to zero.
In the present paper, the following two conditions are taken as assumptions:
Assumption 1.
The function
is Lipschitz in , if
exists such that, :
Assumption 2.
The disturbancefulfills the following conditions:whereare known real constant matrices andis an unknown real time-varying matrix where, with I as the identity matrix.
3. Estimation of Non-Fragile States
Theorem 2 is developed to establish a required hypothesis for the state estimate error origin to be Mittag-Leffler stable.
Theorem 2.
Taking into consideration systems (2) and (4), in terms of circumstances (Assumption 1), (3), and (Assumption 2). Ifandand scalarsandin a such way that the LMI (8) is feasible, so the origins of the erroris globally Mittag-Leffler stable, withperformance.
whereand.
Proof.
We consider
Using Lemma 1, we have:
The following property, which is true for all scalars , can be used:
One has (C1) as a starting point:
For each positive scalar , it is true:
For each positive scalar , it is true:
- Case 1 ():
From (9) through (11), we get:
where .
Lemma (Lemma 2) may be used to show that is equivalent to:
where and .
Now condition (14) ensures that with . So, by applying Theorem 1, it may be demonstrated that is globally Mittag-Leffler stable.
- Case 2 ():
Taking (9), (10), (11), and (12) into account, the following upper bound may be obtained for :
As a result, we may write the following inequality:
where , with:
Let us now consider the situation:
So:
And when it has been integrated, it maintains that:
Now, based on the work of [23], and using the following property:
One gets:
Using the initial condition of zero, one obtains , and then:
Now, since for any , then from (19), we get: for any . Then, using (18), one can write, for any :
Letting , we obtain:
Hence, . As a result of applying Definition 4, it is possible to deduce that system (5) is Mittag-Leffler stable under a performance . Using Lemma 2, we can see that (17) Equation (8). The proof is now complete. □
Remark 1.
The article [26] makes a similar development in the context of conformable fractional order systems.
4. Numerical Illustration
This section applies the suggested non-fragile state estimation method to the numerical system (2) using the following configuration:
The fractional-order derivative is taken as . Regarding (7), the situation is satisfactory at . The following is the structure of the disturbance on the gain of the observer as demonstrated by the condition (C2), with:
This simulation part looks at both of the instances discussed in the preceding section (disturbance-free and disturbance-dependent).
4.1. Case 1 ()
Solving Equation (14) provides:
On the other hand, the observer gain matrix is calculated:
. is used to excite the system to implement the simulation. The evolution of the state estimation errors , and is depicted in Figure 1.
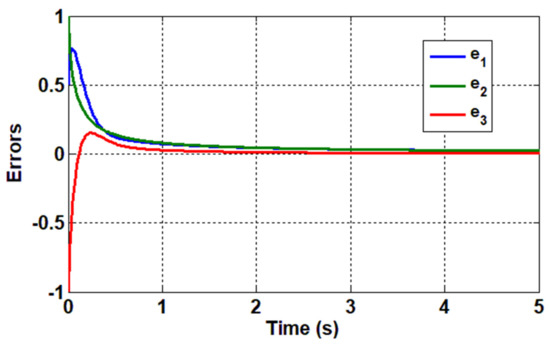
Figure 1.
State estimation errors in the disturbance-free case.
As shown in Figure 1, the suggested non-fragile observer’s effectiveness in the situation of no disturbances may be validated. and have a Mittag-Leffler stability that is clearly apparent.
4.2. Case 2 ()
In this part, the authors want to show Mittag-Leffler stability with an effectiveness when the system is subjected to a perturbation vector that fulfills specific requirements (3). To create the simulation, the authors identify the following perturbation:
, , , and
are obtained by solving Equation (8) using the MATLAB LMI control toolbox. The observer gain matrix may then be calculated:
is Mittag-Leffler stable with . For the simulation model to work, is applied to the system. , and are shown in Figure 2.
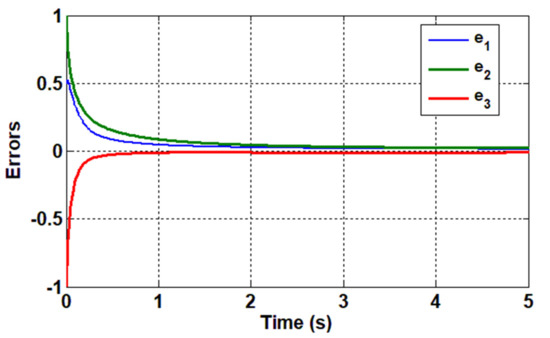
Figure 2.
State estimation errors in the presence of disturbance .
As shown in Figure 2, the non-fragile observer’s performance may be validated in the presence of a disturbance . On the contrary, the Mittag-Leffler stability of the error origins with performance may be clearly shown.
5. Conclusions
The authors of this work have built a non-fragile observer for non-linear fractional-order systems using the Caputo fractional-order derivative concept. A general theorem has been established. This theorem considers both the disturbance-free and disturbance situations. The theory was used to compensate for the influence of the input disturbance on the state estimation process; a performance was developed, and the global Mittag-Leffler stability of the error origin, with a performance , was proven. At the end of the paper, a simulation analysis for a numerical example is presented to corroborate the theoretical conclusions and illustrate the usefulness of the recommended system. The current work is unique in that it is the first to address the problem of the Caputo fractional-order system.
Author Contributions
Conceptualization, O.K. and O.N.; methodology, A.B.M.; software, Y.B.; validation, A.A., A.R. and O.N.; formal analysis, Y.B.; investigation, A.B.M.; resources, A.R.; data curation, A.A.; writing—original draft preparation, O.K.; writing—review and editing, O.N.; visualization, Y.B.; supervision, O.K.; project administration, A.B.M.; funding acquisition, O.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research has been funded by the Scientific Research Deanship at the University of Ha’il—Saudi Arabia through project number RG-21 159.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V. Fractional Order Systems and Controls: Fundamentals and Applications; Springer: Berlin, Germany, 2010; ISBN 9781849963350. [Google Scholar]
- Cattani, C.; Srivastava, H.M.; Yang, X.J. Fractional Dynamics; Walterde Gruyter, K.G., Ed.; De Gruyter Open Poland: Warsaw, Poland, 2015; ISBN 9783110472097. [Google Scholar]
- Makhlouf, A.B.; Kharrat, M.; Hammami, M.A.; Baleanu, D. Henry–Gronwall type q-fractional integral inequalities. Math. Methods Appl. Sci. 2021, 44, 2033–2039. [Google Scholar] [CrossRef]
- Mohammad, T.; Mohammad, H.A. Stability analysis of time-delay incommensurate fractional-order systems. Commun. Nonlinear Sci. Numer. Simul. 2022, 109, 106270. [Google Scholar]
- Dhanalakshmi, P.; Senpagam, S.; Mohanapriya, R. Finite-time fuzzy reliable controller design for fractional-order tumor system under chemotherapy. Fuzzy Sets Syst. 2022, 432, 168–181. [Google Scholar] [CrossRef]
- Majid, G. Robust stabilization criteria of a general form of fractional-order controllers for interval fractional-order plants with complex uncertain parameters. ISA Trans. 2022, in press. [Google Scholar] [CrossRef]
- Wang, F.; Liu, X. Pseudo-State Estimation for Fractional Order Neural Networks. Neural Process. Lett. 2022, 54, 251–264. [Google Scholar] [CrossRef]
- Wang, H.; Liu, P.X.; Shi, P. Observer-based fuzzy adaptive output-feedback control of stochastic nonlinear multiple time-delay systems. IEEE Trans. Cybern. 2017, 47, 2568–2578. [Google Scholar] [CrossRef]
- Salah, R.B.; Omor, K.; Hsan, H. A nonlinear Takagi-Sugeno fuzzy logic control for single machine power system. Int. J. Adv. Manuf. Technol. 2017, 90, 575–590. [Google Scholar] [CrossRef]
- Mostafa, M.A.K. Nonlinear biological population model; computational and numerical investigations. Chaos Solitons Fractals 2022, 162, 112388. [Google Scholar]
- Khater, M.M.A. Recent electronic communications; optical quasi–monochromatic soliton waves in fiber medium of the perturbed Fokas–Lenells equation. Opt. Quantum Electron. 2022, 54, 586. [Google Scholar] [CrossRef]
- Wang, R.; Xing, J.; Wang, P.; Yang, Q. Non-Fragile Observer Design for Nonlinear Switched Time Delay Systems Using Delta Operator. In Proceedings of the IEEE 2012 UKACC International Conference on Control, Cardiff, UK, 3–5 September 2012; pp. 387–393. [Google Scholar]
- Xiao, H.A.N.; Song, W.O. Non-fragile Observer Design and Stabilization Control for Singular Systems. J. Nanjing Univ. Sci. Technol. 2012, 36, 606–611. [Google Scholar]
- Hu, J.; Wang, Z.; Niu, Y.; Stergioulas, L.K. H∞ sliding mode observer design for a class of nonlinear discrete time-delay systems: A delay-fractioning approach. Int. J. Robust Nonlinear Control 2012, 22, 1806–1826. [Google Scholar] [CrossRef]
- Gao, N.; Darouach, M.; Voos, H.; Alma, M. New unified H∞ dynamic observer design for linear systems with unknown inputs. Automatica 2016, 65, 43–52. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, G.; Wang, J. H∞ Observer Design for LPV Systems With Uncertain Measurements on Scheduling Variables: Application to an Electric Ground Vehicle. IEEE/ASME Trans. Mechatron. 2016, 21, 1659–1670. [Google Scholar] [CrossRef]
- Martynyuk, V.; Ortigueira, M. Fractional model of an electrochemical capacitor. Signal Process. 2015, 107, 355–360. [Google Scholar] [CrossRef]
- Atangana, A.; Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. arXiv 2016, arXiv:1602.03408. [Google Scholar] [CrossRef]
- Fatemeh, D.; Hamed, M. An ADRC-based backstepping control design for a class of fractional-order systems. ISA Trans. 2022, 121, 140–146. [Google Scholar]
- Saliha, M.; Mohammed, C.; Michael, V. Basin, Bounded real lemma for singular linear continuous-time fractional-order systems. Automatica 2022, 135, 109962. [Google Scholar] [CrossRef]
- Boroujeni, E.A.; Momeni, H.R. An iterative method to design optimal non-fragile H∞ observer for Lipschitz nonlinear fractional-order systems. Nonlinear Dyn. 2015, 80, 1801–1810. [Google Scholar] [CrossRef]
- Huong, D.C.; Thuan, M.V. Mixed H∞ $ H_ {\infty} $ and Passive Control for Fractional-Order Nonlinear Systems Via LMI Approach. Acta Appl. Math. 2020, 170, 37–52. [Google Scholar] [CrossRef]
- Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Gallegos, J.A.; Castro-Linares, R. Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun. Nonlinear Sci. Numer. Simulat. 2015, 22, 650–659. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.Q.; Podlubny, I. Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Zhang, F. The Schur Complement and Its Applications; Springer Science & Business Media: Berlin, Germany, 2006. [Google Scholar]
- Naifar, O.; Jmal, A.; Ben Makhlouf, A. Non-fragile H∞ observer for Lipschitz conformable fractional-order systems. Asian J. Control 2021. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).