Abstract
Let k and n be two positive integers. Firefighting is a discrete dynamical process of preventing the spread of fire. Let G be a connected graph G with n vertices. Assuming a fire starts at one of the vertices of G, the firefighters choose k unburned vertices at each step, and then the fire spreads to all unprotected neighbors of the burning vertices. The process continues until the fire stops spreading. The goal is to protect as many vertices as possible. When a fire breaks out randomly at a vertex of G, its k-surviving rate, , is the expected number of saved vertices. A graph is IC-planar if it has a drawing in which each edge cross once and their endpoints are disjoint. In this paper, we prove that for every IC-planar graph G. This is proven by the discharging method and the locally symmetric of the graph.
1. Introduction
Firefighting is a discrete-time process that occurs on a connected graph that simulates the spread of fire, virus, or rumors across a network. Such a problem is named after Hartnell [1], who presented it at a combinatorial mathematics and computing conference in 1995. Specifically, given a connected graph G and a positive integer k, initially, assume that the fire breaks out at one of the vertices of G. At each stage, firefighters select a subset of at most k vertices that are not yet on fire for defense. At the same time, the fire spreads to all undefended neighbours. This process ends until the fire stops spreading. Furthermore, unburned vertices can be regarded as saved. The goal is to maximize the number of saved vertices.
The complexity of firefighting is NP-complete for bipartite graphs [2], cubic graphs [3], and even trees of maximum degree three [4]. There is a considerable amount of literature on the algorithms of firefighting and complexity. Further information on firefighting can be found in the latest survey article by Wang and Kong [5]. Moreover, firefighting modeling has many applications in computer science, biology, the spread of epidemics, etc. (see [6,7,8]).
To demonstrate the defensive capabilities of a graph or a network as a whole, Cai and Wang [9] introduced surviving rate of graphs in 2009. Let sn be the maximum number of vertices that the firefighter can save when a fire breaks out at vertex v. The k-surviving rate, denoted by , is the expectation of the vertices that can be saved when a fire breaks out randomly on one vertex of G with n vertices. That is:
In the probabilistic sense, for any , almost all graphs have , due to Wang et al. [10]. Let c be a positive constant less than one. It is natural to determine whether a given graph G has . For convenience, such graph G is called k-good.
Let l be a non-negative integer. A graph which can be embedded in the Euclidean plane with at most l crossings per edge is called an l-planar graph, and let be the family of l-planar graphs. Obviously, is the family of planar graphs. In particular, a 1-planar graph is IC-planar if it admits a 1-planar drawing such that no two crossed edges share an end-vertex. A 1-planar graph is NIC-planar if it admits a 1-planar drawing such that any two distinct pairs of crossing edges have at most one end-vertex in common. We use and to denote the classes of IC-planar graphs and NIC-planar graphs, respectively. From the definition, we have:
An example of a planar graph, an IC-planar graph, a NIC-planar graphs, and a 1-planar graph is shown in Figure 1. Observe that all of them are symmetric with respect to their vertices.
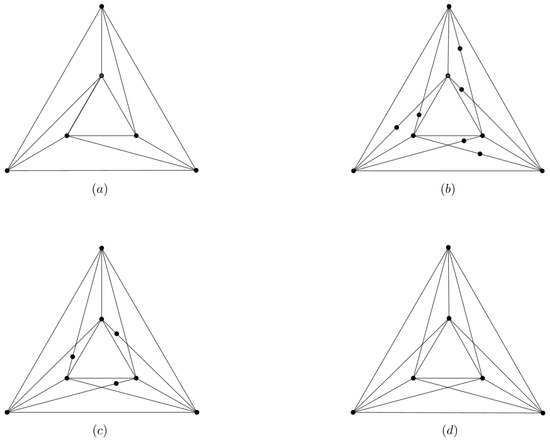
Figure 1.
(a) A planar graph. (b) An IC-planar graph. (c) A NIC-planar graph. (d) A 1-planar graph.
Note that the smaller the number of edges, the higher the probability of k-good. Most investigations of surviving rate concerning sparse graphs. Table 1 shows all known such results on the graph classes of k-good, up to our own knowledge.

Table 1.
The latest results of k-good families.
In this paper, we will show the following result, which implies that IC-planar graphs are 4-good.
Theorem 1.
Let G be an IC-planar graph. Then, .
2. Notation
An IC-plane graph, which is a drawing of a IC-planar graph in the Euclidean plane, such that each edge intersects another edge with as few crossings as possible. For an IC-plane graph G, for each pair edges that cross each other at a crossing point z, their end vertices are pairwise distinct. Let be the set of all crossing points and be the non-crossed edges in G. An associated plane graph of G is the plane graph with:
where is a crossing edge and z is the crossing point on . Thus, each of the crossing point becomes an actual vertex of degree four in . For convenience, we still refer to the crossing vertices in as new vertices, and the edges in that contain a crossing vertex are called crossing edges. Denote the set of faces of . Let and denote the sets of vertices in G with degree k, at most k and at least k, respectively. We say a vertex v is k-vertex -vertex or -vertex ) if or . The set of vertices which is adjacent to v in graph G is denoted by , and set .
A kite is a graph isomorphic to with an embedding such that all the vertices are on the boundary of the outer face, the four edges on the boundary are planar, and the remaining two edges cross each other (see Figure 2a). We say that a kite with crossing edges and is empty if it contains no other vertices; that is, the edges , , and are consecutive in the counterclockwise order around a (see Figure 2b,c).
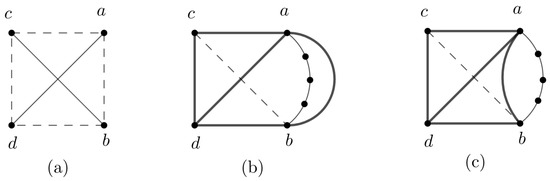
Figure 2.
(a) A kite. (b) The kite (bold lines) is not empty. (c) Rerouting edge ab to make the kite empty.
A vertex v is called good if sn. Otherwise, v is called bad. Let and be the set of good vertices and bad vertices, respectively. Moreover, let be the set of bad k-vertices, For a vertex , we use and to denote the number of bad k-vertices and crossing vertices that are adjacent to v in , respectively. Let
,
for ,
,
.
Let G be an IC-plane graph. G is maximal if no edge can be added without violating IC-planarity. An IC-planar graph G is maximal if every IC-planar embedding is maximal. If we restrict to IC-plane graphs, we say that an IC-plane graph G is planar-maximal if no edge can be added without creating at least an edge crossing on the newly added edge or making the graph not simple.
3. Structural Properties
In this section, we identify some structural properties that lead to good vertices in the plane-maximal IC-plane graph.
Lemma 1
([23]). Let be an IC-plane graph. There exists a plane-maximal IC-plane graph with such that the following conditions hold:
- (1)
- The four endpoints of each pair of crossing edges induce a kite.
- (2)
- Each kite is empty.
- (3)
- Let C be the set of crossing edges in . Let be a subset containing exactly one edge for each pair of crossing edges. Then, is plane and triangulated.
- (4)
- The outer face of is a 3-cycle of non-crossed edges.
Corollary 1.
Let be a plane-maximal IC-plane graph and . Then, the neighbors of v in are adjacent successively.
Proof.
The Lemma 1 states that the edge set of every plane-maximal IC-plane graph can be decomposed into a triangulation and a matching M. Let be a k-vertex with in clockwise order around v. If v is matched under M, without loss of generality, suppose that . Then, by Lemma 1(3), where . Since and are crossing edges, by Lemma 1(1). Otherwise, according to Lemma 1(3), we have , where . □
Fact 1
([9]). Let H be a subgraph of G with . Then, .
Given the fact above, plane-maximal IC-plane graphs have the lowest surviving rates among all IC-plane graphs. For convenience, we always assume that G is a plane-maximal IC-plane graph, and is an associated plane graph of G in the following argument. Furthermore, assume the neighbours of k-vertex v in G in clockwise order around v are .
Lemma 2.
Every -vertex is good.
Lemma 3.
Let v be a bad 5-vertex. Then, v is adjacent to five -vertices in G. Moreover, if v is incident to a crossing edge, then v is adjacent to at least two -vertices in G.
Proof.
By contradiction, assume v is adjacent to a -vertex, say . When a fire breaks out at v, we protect first. By Corollary 1, we have . Noting that both and have been protected in the first turn, we only need to protect all vertices in in the second turn. Thus, all the vertices in have been saved under our strategy. This implies that , that is, v is a good 5-vertex, is a contradiction.
Suppose v is incident to a crossing edge. Without loss of generality, suppose that is a crossing edge. By Corollary 1, we obtain that . If is a -vertex, then we first protect ; next, we protect all vertices in when a fire breaks out at v. It follows that , that is, v is a bad 5-vertex, which is impossible. Thus, is a -vertex. An analogous argument shows that is a -vertex. □
Lemma 4.
Let be a 3-cycle with are bad vertices, and let .
- (1)
- If v is a bad 6-vertex, then .
- (2)
- Moreover, if , then .
Proof.
Suppose, by way of contradiction, that . Assume that a fire breaks out at v. We first protect , then . It is easy to inspect that all vertices in have been saved under the above strategy. Hence, , that is, v is a good 6-vertex, is a contradiction.
Assume that . Suppose x is a -vertex. When a fire breaks out at v, we first protect , then , and finally the neighbors of x in G which are not protected. According to Corollary 1, it is not difficult to see that all the vertices in have been saved under our strategy. Thus, , which contradicts that v is a bad 6-vertex. □
By calculating the cardinality of , deduce the following corollary from Lemma 4.
Corollary 2.
Let be a 3-cycle with and . Then, the vertices in and are -vertices.
Corollary 3.
There are at most two bad 6-vertices in the four endpoints of each pair of crossing edges.
Proof.
Let and be crossing edges. By Lemma 1, derive that . We establish the corollary by contradiction. Suppose that there are at least three bad 6-vertices in , say and c. Hence, there is a 3-cycle , where are bad 6-vertices. Since , according to Lemma 4, c is a good 6-vertex, there is a contradiction. □
Lemma 5.
Every 8-vertex is adjacent to at most one bad 5-vertex in G.
Proof.
By contradiction. Let u be a 8-vertex which is adjacent to at least two bad 5-vertices in G, say v and w. Because bad 5-vertices are not adjacent by Lemma 3, . Suppose a fire breaks out at v, we first protect , then , and finally . Since by Corollary 1, all the vertices in have been saved under our strategy. Thus, , which contradicts v, is a bad 5-vertex. □
Lemma 6.
Every vertex in is adjacent to a vertex in .
Proof.
If , then v is adjacent to a -vertex by Lemma 3. Assume . If v is adjacent to a -vertex u, then u is a good vertex by Lemma 3. Suppose the neighbors of v are -vertices. If there are two adjacent bad 6-vertices in . Without loss of generality, say and are bad 6-vertices, it can readily be checked that . It follows that , where , by Lemma 4(2). Thus, we may assume v is adjacent to a 7-vertex, say . If , then there is a 3-cycle with by the definition of , since , by Corollary 2, , is a contradiction. Hence, .
Assume . Then, v is adjacent to a vertex x in with , by the definition of . Without loss of generality, we may suppose that crosses in G at the crossing x. Since , there is a 3-cycle , where . It is not hard to check that satisfies the condition of Lemma 4(2). Hence, , where . □
4. The Surviving Rate
In this section, we use the Discharging Method in two stages to prove the main result of Theorem 1.
Let G be a plane-maximal IC-plane graph, and be an associated plane graph of G. Assign a charge of to each vertex , and a charge of to each face . Using Euler’s Formula, it can be verified that the total charge assigned to vertices and faces is −8.
4.1. First Discharge
In the first stage, we define the following discharging rules (R1) to (R3).
- (R1)
- Every vertex in sends charge to incident 3-face.
- (R2)
- Suppose v is a crossing vertex and u is a neighbor of v in .
- (R2.1)
- If u is good, then u sends charge to v;
- (R2.2)
- If and , then u sends charge to v;
- (R2.3)
- If and , then u sends charge to v;
- (R2.4)
- If and , then u sends charge to v;
- (R2.5)
- If and , then u sends charge to v.
- (R3)
- Suppose v is a bad 5-vertex and u is a neighbor of v in .
- (R3.1)
- If , then u sends charge to v;
- (R3.2)
- If , then u sends charge to v.
Lemma 7.
Let denote the resultant weight function after the discharging procedure is performed on according to the rules (R1) to (R3). Then, we have the following:
- (1)
- If , then ;
- (2)
- If , then ;
- (3)
- For each vertex , we have the following:
- (3.1)
- If , then ;
- (3.2)
- If , then ;
- (3.3)
- If , then ;
- (3.4)
- If , then .
Proof.
Assume , by (R1) and (R2.1). If , then according to Lemma 1. It follows that by (R1). Let , without loss of generality, and assume that cross in G at the crossing x. If one of is a good vertex, it sends to x by (R2.1). This implies that . Otherwise, every vertex in is bad. If x is adjacent to a bad 5-vertex, say a, that is , then each vertex in is a -vertex by Lemma 3. It follows that by (R2.2). According to Corollary 3, there are at most two bad 6-vertices in . If , that is, , then . We have by (R2.3). Similarly, according to (R2.4) and (R2.5), if , then , if , then , respectively. Therefore, (1) and (2) hold.
Now, we begin with the proof of the statement (3). Let . If , then x is adjacent to five -vertices in by Lemma 3, which sends at least to x by (R3.1) and (R3.2). Hence, . If , then x is adjacent to at least two -vertices in G by Lemma 3. Therefore, by (R3.1) and (R3.2). Assume . Then, by (R1). Assume . Then x is adjacent to a vertex in , which gets from x by (R2.3). Hence, . Hence, (3.1) holds.
If , then by (R1), (R2.4) and (R2.5).
If , then by Lemma 5. Therefore, by (R1), (R2), and (R3.1).
If , then as bad 5-vertices are not adjacent. Consequently, . □
4.2. Second Discharge
We now need to perform a second stage of discharging. To do this, we define an additional discharging rule R′ as follows:
(R′) Every vertex in sends to every adjacent vertex in .
Let denote the resultant weigh function after the second discharging procedure is performed on according to the rule (R′).
Lemma 8.
- (1)
- If , then ;
- (2)
- If , then ;
- (3)
- If , then .
Proof.
If , then it is obvious that as .
Let . Then, . By Lemma 7, . If , then x is adjacent to a vertex in by Lemmas 3 and 6. Hence, by Lemma 7 (3.1) and (R′). If , then . If , then . If , then .
If , then by Lemma 7. □
4.3. The Main Result
By Lemma 8, let , we can derive the following.
Thus:
It is easy to see that when a fire breaks out at a vertex in , the firefighter can save at least four vertices. Thus:
Therefore:
It is interesting to improve the lower bound for the class of IC-planar graphs, as this is not the best possible. However, we are mostly concerned with the following question.
Question 1.
What is the smallest integer such that all IC-planar graphs are -good ?
Note that is a planar graph, which is also an IC-planar graph. It is easy to compute that ; therefore, . This fact and our Theorem 1 imply that . It is conjectured that planar graphs are 2-good in [17], and we conjecture that IC-planar graphs are also 2-good.
Author Contributions
Methodology, X.H. and J.K.; validation, X.H. and J.K.; formal analysis, J.H.; investigation, X.H.; writing—original draft preparation, J.H.; writing—review and editing, X.H. and J.K.; visualization, J.H.; supervision, J.K.; project administration, J.K.; funding acquisition, X.H. and J.K. All authors have read and agreed to the published version of the manuscript.
Funding
The first author was partially supported by NSFC (Nos. 11801512, 11971437, 11901525). The third author was partially supported by the China Postdoctoral Science Foundation (2020M681927), and Fundamental Research Funds for the Provincial Universities of Zhejiang (2021YW08).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hartnell, B. Firefighter! An application of domination. In Presentation at the 25th Manitoba Conference on Combinatorial Mathematics and Computing; University of Manitoba: Winnipeg, MB, Canada, 1995. [Google Scholar]
- MacGillivray, G.; Wang, P. On the firefighter problem. J. Combin. Math. Combin. Comput. 2003, 47, 83–96. [Google Scholar]
- King, A.; MacGillivray, G. The firefighter problem for cubic graphs. Discret. Math. 2010, 310, 614–621. [Google Scholar] [CrossRef][Green Version]
- Finbow, S.; King, A.; MacGillivray, G.; Rizzi, R. The firefighter problem for graphs of maximum degree three. Discret. Math. 2007, 307, 2094–2105. [Google Scholar] [CrossRef]
- Wang, W.; Kong, J. Suriving rate of graphs and Firefighter problem. Front. Math. China 2022, 17, 227–254. [Google Scholar] [CrossRef]
- Newman, M.E.; Jensen, I.; Ziff, R.M. Percolation and epidemics in a two-dimensional small world. Phys. Rev. E 2002, 65, 021904. [Google Scholar] [CrossRef] [PubMed]
- Pastor-Satorras, R.; Vespignani, A. Epidemic spreading in scale-free networks. Phys. Rev. Lett. 2001, 86, 3200–3203. [Google Scholar] [CrossRef] [PubMed]
- Potapov, A.B.; Lewis, M.A. Allee effect and control of lake system invasion. Bull. Math. Biol. 2008, 70, 1371–1397. [Google Scholar] [CrossRef][Green Version]
- Cai, L.; Wang, W. The surviving rate of a graph for the firefighter problem. SIAM J. Discret. Math. 2009, 23, 1814–1826. [Google Scholar]
- Wang, W.; Finbow, S.; Wang, P. The surviving rate of an infected network. Theoret. Comput. Sci. 2010, 411, 3651–3660. [Google Scholar] [CrossRef][Green Version]
- Prałat, P. Graphs with average degree smaller than 30/11 burn slowly. Graphs Combin. 2014, 30, 455–470. [Google Scholar] [CrossRef]
- Prałat, P. Sparse graphs are not flammable. SIAM J. Discret. Math. 2013, 27, 2157–2166. [Google Scholar] [CrossRef][Green Version]
- Gordinowicz, P. The 2-surviving rate of planar graphs with average degree lower than 9/2. J. Graph Theory 2018, 89, 341–349. [Google Scholar] [CrossRef]
- Wang, W.; Finbow, S.; Kong, J. The 2-surviving rate of planar graphs without 6-cycles. Theoret. Comput. Sci. 2014, 518, 22–31. [Google Scholar] [CrossRef]
- Wang, W.; Wu, T.; Hu, X.; Wang, Y. Planar graphs without chordal 5-cycles are 2-good. J. Comb. Optim. 2018, 35, 980–996. [Google Scholar] [CrossRef]
- Wang, W.; Finbow, S.; Wang, P. A lower bound of the surviving rate of a planar graph with girth at least seven. J. Comb. Optim. 2014, 27, 621–642. [Google Scholar] [CrossRef]
- Esperet, L.; Heuvel, J.; Maffray, F.; Sipma, F. Fire containment in planar graphs. J. Graph Theory 2013, 73, 267–279. [Google Scholar] [CrossRef]
- Kong, J.; Wang, W.; Zhu, X. The surviving rate of planar graphs. Theoret. Comput. Sci. 2012, 416, 65–70. [Google Scholar] [CrossRef][Green Version]
- Kong, J.; Zhang, L.; Wang, W. Structural properties and the surviving rate of planar graphs. Discret. Math. Algorithms Appl. 2014, 6, 1450052. [Google Scholar] [CrossRef]
- Gordinowicz, P. Planar graph is on fire. Theoret. Comput. Sci. 2015, 593, 160–164. [Google Scholar] [CrossRef][Green Version]
- Kong, J.; Hu, X.; Guo, W.; Wang, W. The Surviving Rate of NIC-Planar Graphs. Acta Math. Appl. Sin. (Chin. Ser.) 2022. accepted for publication. [Google Scholar]
- Kong, J.; Zhang, L.; Wang, W. A note on the surviving rate of 1-planar graphs. Discrete Math. 2017, 340, 1074–1079. [Google Scholar] [CrossRef]
- Brandenburg, F.J.; Didimo, W.; Evans, W.S.; Kindermann, P.; Liotta, G.; Montecchiani, F. Recognizing and drawing IC-planar graphs. Theoret. Comput. Sci. 2016, 636, 1–16. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).