Abstract
In this paper, we consider the split quaternion matrix equation , . The representation method has the characteristics of transforming a matrix with a special structure into a column vector with independent elements. By using the real representation of split quaternion matrices, representation method, the Kronecker product of matrices and the Moore-Penrose generalized inverse, we convert the split quaternion matrix equation into the real matrix equation, and derive the sufficient and necessary conditions and the general solution expressions for the (skew) bisymmetric solution of the original equation. Moreover, we provide numerical algorithms and illustrate the efficiency of our method by two numerical examples.
1. Introduction
In this paper, we adopt the following notations.
•/: The real number field/the set of split quaternions.
•/: The set of all real matrices/split quaternion matrices.
•/: The set of all real bisymmetric matrices/real skew bisymmetric matrices/split quaternion bisymmetric matrices/split quaternion skew bisymmetric matrices.
•: The unit matrix with order n.
•: The k-th column of .
•/ / /: The Moore–Penrose inverse/transpose/conjugate/conjugate transpose of A, where .
•: The Frobenius norm of a matrix or Euclidean norm of a vector.
•⋉/⊗: The semi-tensor product of matrices/Kronecker product of matrices.
In 1849, the British mathematician, Jame Cockle, introduced the split quaternion. As one of the emerging research topics, the split quaternion has important applications in the fields of classical mechanics, quantum mechanics and so on [1,2]. On the geometric theory, the rotation of a three-dimensional Minkowski space can be represented by a split quaternion [3,4]. A split quaternion is represented as in which and three imaginary units satisfy and As a generalization to complex numbers, the split quaternion do not satisfy the commutative law, which makes many problems associated with the split quaternion more complicated.
For any matrix , X can be uniquely expressed as , in which , let be the conjugate of X, be the conjugate transpose of X, and the -conjugate transpose of X, is as follows:
As a branch of matrix theory, the matrix equation plays an important role in neural network [5], control theory [6], color image processing [7], stability theory and so on. The matrix equation solving problem has important practical value and theoretical significance, which many scholars have been widely concerned by, and which has obtained many valuable results. Liu et al. [8] and Mehany et al. [9] established the solvability conditions and the formula of the general solution to a Sylvester-like and three symmetrical systems of coupled Sylvester-like quaternion matrix equations, respectively. Ling et al. [10] employed matrix LSQR algorithm to deal with quaterniontic least squares problem. For the Stein matrix equation , owing to their important applications in control theory, communication theory, neural network and image restoration, there has been an increased interest in solving them in recent years. In the real field, Zhou et al. [11] studied the iterative solution to the Stein matrix equation. In the complex field, Jiang et al. [12] derived the explicit solution of the complex matrix equation by means of the characteristic polynomial. By using the complex representation and real representation matrices of quaternion matrices, Yuan et al. [13] and Zhang et al. [14] derived the minimal norm least squares solution of the quaternion matrix equation (, which is the j-conjugate matrix of quaternion matrix X), respectively.
Now, we turn our attention to the split quaternion matrix equation. Some research extended the results of quaternion matrix equations to the split quaternion equations [15,16,17]. For example, Li et al. [15] investigated the -Hermitian solutions of the split quaternion matrix equation by using the real representation and complex representation of split quaternion matrices. Liu and Zhang [17] designed some new real representations of a split quaternion matrix to discuss the consistency of two kinds of split quaternion matrix equations and . In this paper, we study the bisymmetric and skew bisymmetric solutions of split quaternion matrix equation
where . If , namely, , Equation (1) is Stein equation.
The detailed problems are as follows.
Problem 1.
Let find out , such that
Problem 2.
Let , find out , such that
This paper is organized as follows. In Section 2, we recall and obtain some preliminary results that will be used in the paper. In Section 3, we introduce the representation and study its properties in the bisymmetric and skew bisymmetric split quaternion matrix. In Section 4, we derive the solution of Problems 1 and 2 by using a real representation and representation method. In Section 5, we provide numerical algorithms for solving Problems 1 and 2. Then, we present two numerical examples to illustrate the efficiency and accuracy of the proposed method. Finally, some conclusions are put in Section 6.
2. Preliminaries
In this section, the real representation of split quaternion, the swap matrix in semi-tensor product of matrix, the related theorems and basic knowledge of this paper are introduced. Different from the quaternion matrix, the norm of split quaternion is defined as follows.
Definition 1
([18]). Let , in which , the conjugate of q is defined as . The norm of a split quaternion q is defined as
For any , the Frobenius norm of the split quaternion matrix is defined as
Definition 2
([19]). Let , in which , the real representation matrix of the split quaternion matrix A is defined as
For real representation matrix , denote the first column block as , .
and have the following properties.
Proposition 1
([19]). Suppose and , then
- (i)
- (ii)
Proposition 2.
Suppose and , then
- (i)
- (ii)
- (iii)
The Kronecker product of the matrices is defined as follows.
Definition 3
([20]). Let , the Kronecker product of A and B is defined as
If in which C, D, E, F with appropriate size, then
Now we introduce the definition of the semi-tensor product of matrices.
Definition 4
([21]). Let is the least common multiple of n and p. Then, the semi-tensor product of A and B is defined as
When The semi-tensor product of matrices is a generalization of the conventional matrix product. The exchange of two vector factors in a semi-tensor product can be realized by means of a swap matrix.
Theorem 1
([22]). Let , then
in which is called swap matrix.
For matrix , the column stacking form (column straightening operator) of A is , the row stacking form (row straightening operator) of A is . The swap matrix and straightening operator have the following properties.
Proposition 3
([22]).
- (i)
- The swap matrix is invertible and
- (ii)
- Let , then
- (iii)
Next, we study some lemmas, which are needed later. Similar to [14], the first column block of the real representation matrix has the following properties.
Lemma 1.
Suppose , then
where and
Lemma 2.
Suppose , then
where
Proof of Lemmma 2.
For any .
.
According to Proposition 3, we have
in which Thus
Let , then we have (2). □
Lemma 3.
Suppose , then
in which
Similar to Lemma 2, it can be proved that Lemma 3 holds.
Definition 5
([23]). Let , if , the matrix A is called bisymmetric. If , the matrix A is called skew bisymmetric.
In solving real linear matrix equation, the following lemma is obtained by using the Moore–Penrose inverse.
Lemma 4
([20]). Suppose , the linear matrix equation has a solution if and only if
The general solution is
When rank(A)=n, the matrix equation has a unique solution. The unique solution is
3. Representation
representation was proposed by researcher Weihai Zhang. As a fixed extraction method for extracting independent elements from matrices with special structures, it can transform a matrix-valued equation into a standard vector-valued equation with independent coordinates. Therefore, in this section we apply it to split quaternion bisymmetric and skew bisymmetric matrices to simplify the operation. Firstly, we give the definition of representation.
Definition 6
([24]). Consider a p-dimensional matrix subspace . Let be a set of basis of , for any , there exist , , such that . For mapping the representation of can be expressed as follows:
in which is called an representation matrix of .
Remark 1.
(1) For , owing to the different selection of basis in , the matrix is also different. That is to say, the representation of is not unique.
(2) In Definition 6, is a column vector formed by all elements of X, is a column vector formed by different nonzero elements of X. If the basis of is fixed, and will be uniquely determined.
The following example will illustrate the method of representation.
Example 1.
Let , then . Selecting the basis of as
Obviously, . According to the symmetry of bisymmetric matrix, . It is easy to calculate
Definition 7.
(1) For , let . Extracting the independent elements in matrix A, when when denote as below:
(2) For , let . Extracting the independent elements in matrix A, when when denote as below:
The representations of real bisymmetric and skew bisymmetric matrices are as follows.
Lemma 5.
Let , then
when and
when and
Proof of Lemmma 5.
Lemma 6.
Let , then
when and
when and
We select the standard basis as
where , and the other elements are zero. Since the method is similar to that of Lemma 6, we omit the detailed proof.
Next, we study the representation of split quaternion bisymmetric and skew bisymmetric matrices.
Theorem 2.
Let , then
in which
Proof of Theorem 2.
, then we have According to Lemmas 5 and 6,
Obviously, the formula (9) can be obtained. □
Theorem 3.
Let , then
in which
4. The Solutions of Problems 1, 2
In this section, according to the real representation and representation method of split quaternion matrices, we convert the problems 1, 2 of the split quaternion matrix Equation (1) into corresponding problems of the real matrix equation. When , the solution of different types of equations are given as follows.
4.1. Equation with or
Theorem 4.
Proof of Theorem 4.
According to Propositions 1 and 2 we have
Therefore, the split quaternion matrix Equation (11)/(12) has a bisymmetric solution if and only if for any satisfies
According to Proposition 2, Lemmas 1–3 and Theorem 2, we have
Thus, for , if and only if
For real matrix equation
By the proposition of the Moore–Penrose generalized inverse, we get
For , we obtain
So, (13) holds. By Lemma 4, if (13) holds, the solution set of (11)/(12) over which satisfies (16) can be expressed as
□
4.2. Equation
In this subsection, we consider Equation (1) with , namely,
5. Numerical Algorithm and Experiments
In this section, by using of the results in Section 4, we propose the numerical algorithms.
Example 2.
Consider the split quaternion matrix equation
in which . Let , A and B can be generated randomly in Matlab with
According to the characteristics of bisymmetric matrix, randomly generated . Compute Obviously, the split quaternion matrix Equation (27) has the unique solution . According to Algorithm 1.
| Algorithm 1: (Problem 1) |
|
We compute the numerical solution , denote . By calculation, we obtain the relation between n and the error , shown in Figure 1.
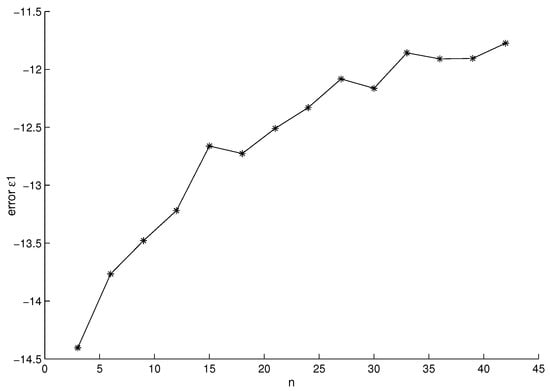
Figure 1.
The error for Problem 1.
Example 3.
Consider the split quaternion matrix equation
in which . Similar to Example 2, let , Randomly generate A and B in Matlab. According to the characteristics of skew bisymmetric matrix, randomly generated . Compute The split quaternion matrix Equation (28) has the unique solution . According to Algorithm 2.
| Algorithm 2: (Problem 2) |
|
We compute the numerical solution , denote . By calculation, we obtain the relation between n and the error , shown in Figure 2.
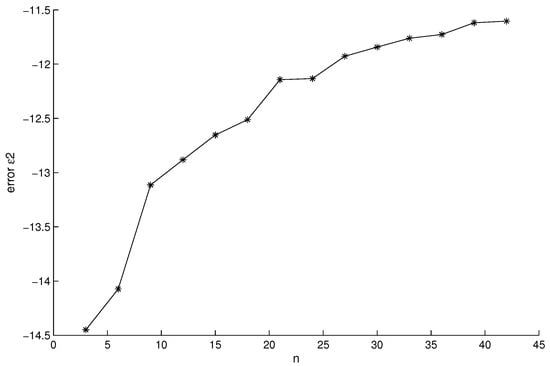
Figure 2.
The error for Problem 2.
6. Conclusions
In this paper, based on the real representation of the split quaternion matrix and representation method, we investigate the solutions of split quaternion matrix Equation (1) over and . Then, we established the equivalent solvability conditions and general expressions of the (skew) bisymmetric solution for the split quaternion matrix Equation (1). The algorithms only involve real operations and the solution expressions we proposed only involve real matrices. Therefore, this method is very convenient, and the final numerical examples also illustrate its efficiency and superiority.
Author Contributions
Conceptualization and methodology, S.Y. and Y.L.; software, S.Y. and A.W.; writing—original draft preparation, S.Y. and Y.L.; writing—review and editing, S.Y. and A.W.; supervision, J.Z.; project administration, Y.L. and J.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the grants from the National Natural Science Foundation of China (62176112) and the Natural Science Foundation of Shandong Province (ZR2020MA053).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors are very indebted to the editors and the reviewers for valuable comments and suggestions, and National Natural Science Foundation of China, Natural Science Foundation of Shandong Province under grant No: 62176112 and ZR2020MA053.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Brody, D.C.; Graefe, E.M. On complexified mechanics and coquaternions. J. Phys. A Math. Theor. 2011, 44, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Kula, L.; Yayli, Y. Split Quaternions and Rotations in Semi Euclidean Space. J. Korean Math. Soc. 2007, 44, 1313–1327. [Google Scholar] [CrossRef] [Green Version]
- O¨zgzdemir, M.; Ergin, A.A. Rotations with unit timelike quaternions in Minkowski 3-space. J Geom. Phys. 2006, 56, 322–336. [Google Scholar] [CrossRef]
- Ramis, C.; Yayli, Y. Dual Split Quaternions and Chasles’ Theorem in 3-Dimensional Minkowski Space . Adv. Appl. Clifford Al. 2013, 23, 951–964. [Google Scholar] [CrossRef]
- Zhang, Y.N.; Jiang, D.C.; Wang, J. A recurrent neural network for solving Sylvester equation with time-varying coefficients. IEEE Trans. Neural Netw. 2002, 13, 1053–1063. [Google Scholar] [CrossRef] [PubMed]
- Barnett, S. Matrices in Control Theory with Applications to Linear Programming; Van Nostrand Reinhold: New York, NY, USA, 1971. [Google Scholar]
- Bouhamidi, A.; Jbilou, K. Sylvester Tikhonov-regularization methods in image restoration. J. Comput. Appl. Math. 2007, 206, 86–98. [Google Scholar] [CrossRef]
- Liu, L.S.; Wang, Q.W.; Chen, J.F.; Xie, Y.Z. An Exact Solution to a Quaternion Matrix Equation with an Application. Symmetry 2022, 14, 375. [Google Scholar] [CrossRef]
- Mehany, M.S.; Wang, Q.W. Three Symmetrical Systems of Coupled Sylvester-like Quaternion Matrix Equations. Symmetry 2022, 14, 550. [Google Scholar] [CrossRef]
- Ling, S.T.; Jia, Z.G.; Lu, X.; Yang, B. Matrix LSQR algorithm for structured solutions to quaternionic least squares problem. Comput. Math. Appl. 2019, 77, 830–845. [Google Scholar] [CrossRef]
- Zhou, B.; Lam, J.; Duan, G.R. On Smith-type iterative algorithms for the Stein matrix equation. Appl. Math. Lett. 2009, 22, 1038–1044. [Google Scholar] [CrossRef] [Green Version]
- Jiang, T.S.; Wei, M.S. On a solution of the quaternion matrix equation X − AB = C and its application. Acta Math. Sin. 2005, 21, 483–490. [Google Scholar] [CrossRef]
- Yuan, S.F.; Liao, A.P. Least squares solution of the quaternion matrix equation X − AB = C with the least norm. Linear Multilinear Algebr. 2011, 59, 985–998. [Google Scholar] [CrossRef]
- Zhang, F.X.; Wei, M.S.; Li, Y.; Zhao, J.L. An efficient method for least squares problem of the quaternion matrix equation X − AB=C. Linear Multilinear Algebr. 2020, 1–13. [Google Scholar] [CrossRef]
- Li, M.Z.; Yuan, S.F.; Jiang, H. Direct methods on η-Hermitian solutions of the split quaternion matrix equation (AXB, CXD) = (E, F). Math. Meth. Appl. Sci. 2021, 1–20. [Google Scholar] [CrossRef]
- Zhang, Z.Z.; Jiang, Z.W.; Jiang, T.S. Algebraic methods for least squares problem in split quaternionic mechanics. Appl. Math. Comput. 2015, 269, 618–625. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y. Consistency of split quaternion matrix equations AX*-XB=CY+D and X-AX*B=CY+D. Adv. Appl. Clifford Algebr. 2019, 29, 1–20. [Google Scholar] [CrossRef]
- Erdogˇdu, M.; O¨Zdemir, M. On Eigenvalues of Split Quaternion Matrices. Adv. Appl. Clifford Algebr. 2013, 23, 615–623. [Google Scholar] [CrossRef]
- Kong, X.Q. Real respresentation and eigenvalues of a split quaternion matrix. J. Inner Mongolia Normal Univ. 2019, 48, 112–116. [Google Scholar]
- Dai, H. Matrix Theory; Science Press: Beijing, China, 2001; pp. 233–245. [Google Scholar]
- Cheng, D.Z.; Xia, Y.Q.; Ma, H.B.; Yan, L.P.; Zhang, H.J. Matrix Algebra, Control and Game, 2nd ed.; Beijing Institute of Technology Press: Beijing, China, 2018; pp. 22–27. [Google Scholar]
- Cheng, D.Z.; Qi, H.S. Lecture Notes in Semi-Tensor Product of Matrices, Basic Theory and Multilinear Operation; Science Press: Beijing, China, 2020; pp. 23–29. [Google Scholar]
- Wang, Q.W.; Sun, J.H.; Li, S.Z. Consistency for bi(skew)symmetric solutions to systems of generalized Sylvester equations over a finite central algebra. Linear Algebra Appl. 2002, 353, 169–182. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.H.; Chen, B.S. H-Representation and Applications to Generalized Lyapunov Equations and Linear Stochastic Systems. IEEE Trans. Autom. Control 2012, 57, 3009–3022. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).