Advanced Algorithms and Common Solutions to Variational Inequalities




Abstract
1. Introduction
2. Definition and Necessary Lemmas
- (i)
- monotone if
- (ii)
- pseudomonotone if leads to
- (iii)
- inverse strongly monotone (ism) if there exists such that
- (iv)
- maximal monotone if it is monotone and its graphis not a proper subset of one of any other monotone mapping,
- (v)
- L-Lipschitz continuous if there exists a positive constant L such that
- (vi)
- nonexpansive ifHere, the set is referred to the set of all fixed points of a mapping ℷ.
3. Main Theorems
- (i)
- The projection computed explicitly as in Theorem 1 because is either half-spaces or the whole space ℸ.
- (ii)
- If ℷ is ism mapping, then ℷ is Lipschitz continuous. Thus, for our algorithms can use to solve the CSVIP for the ism mappings .
4. Numerical Experiments
- (1)
- For Van Hieu results in [23] Algorithm 3.1 (Alg. 1) we use
- (2)
- For our proposed algorithms (Alg. 2) we use and
5. Discussion
- (i)
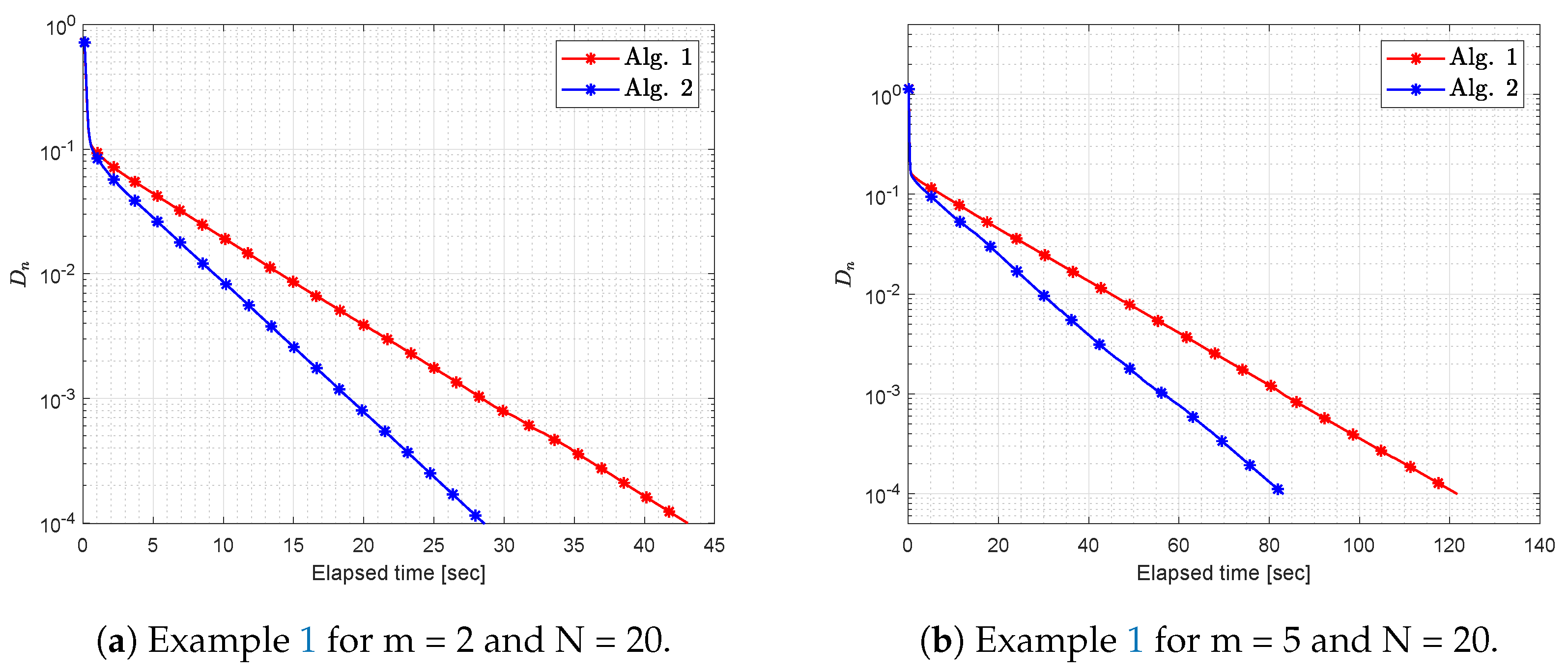
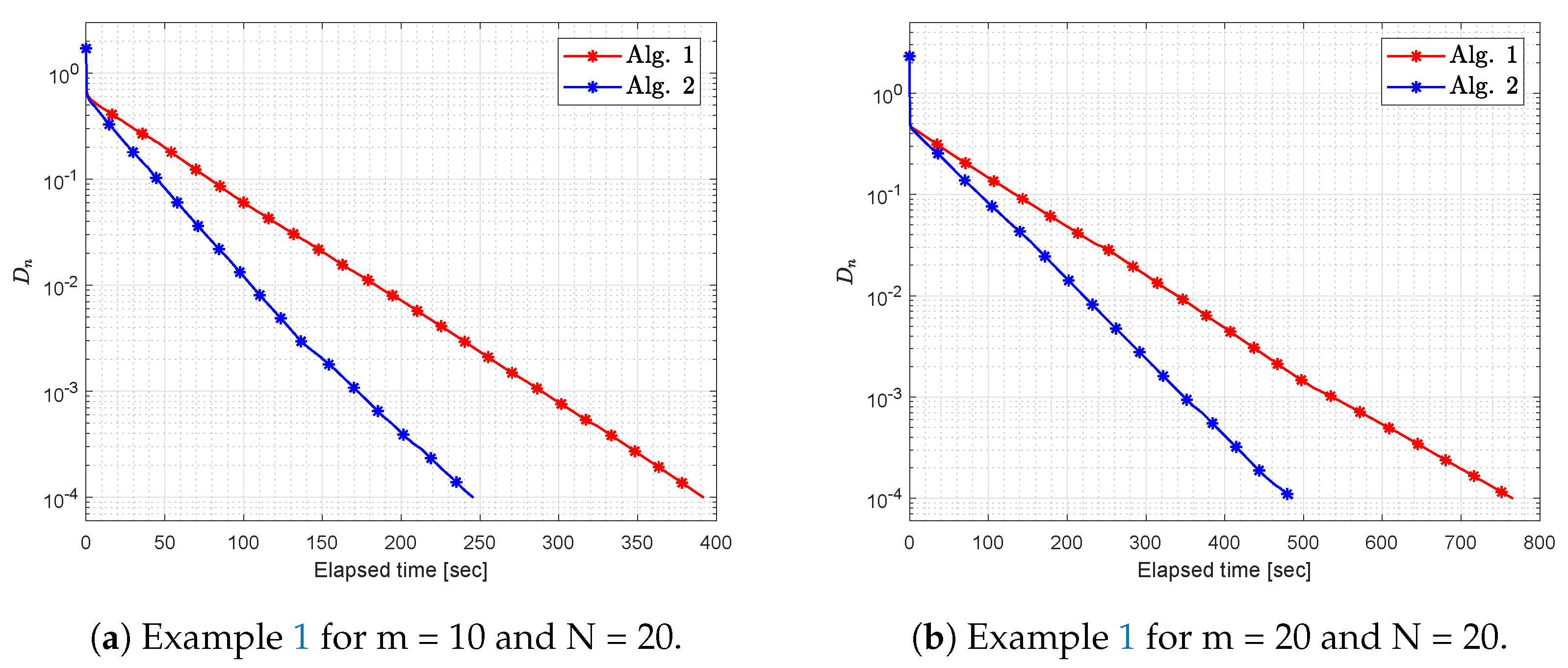
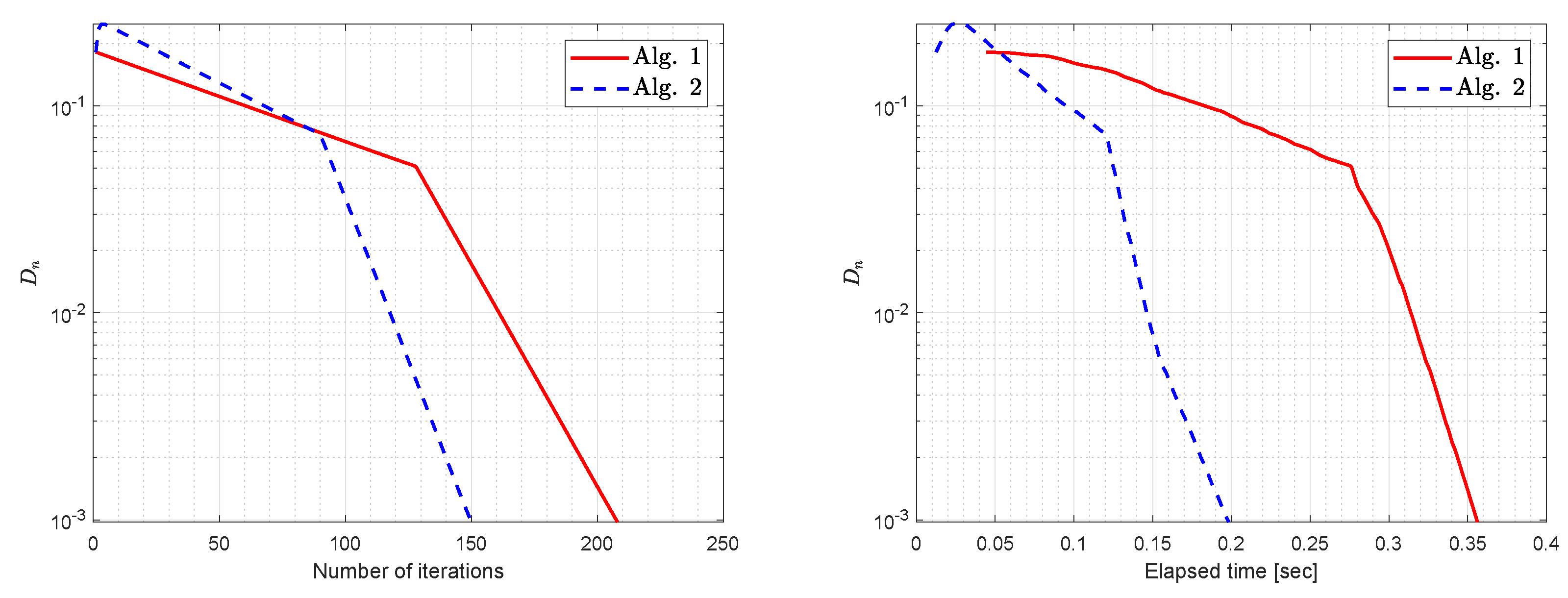
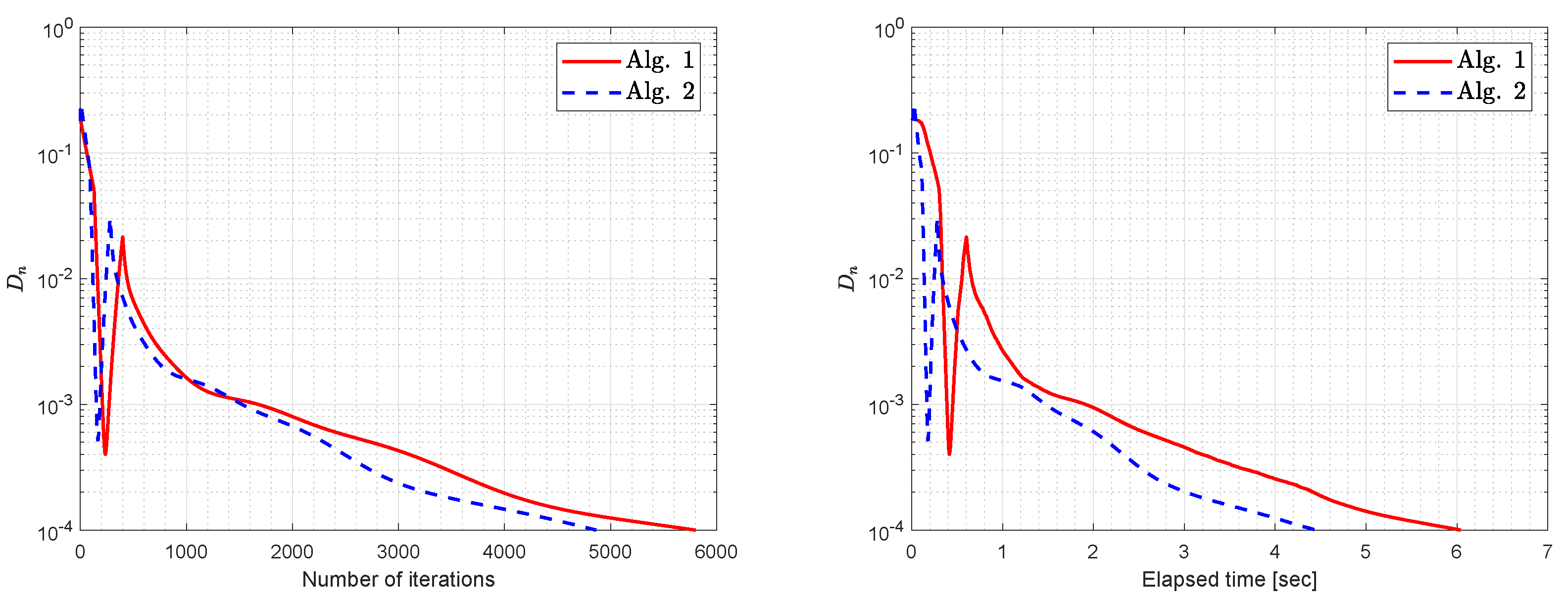
- Figure 1 and Figure 2 and Table 1 demonstrates the behavior of both algorithms as the size of the problem m varies. We can see that the performance of the algorithm depends on the size of the problem. More time and a significant number of iterations are required for large dimensional problems. In this case, we can see that the inertial effect strengthens the efficiency of the algorithm and improves the convergence rate.
- (ii)
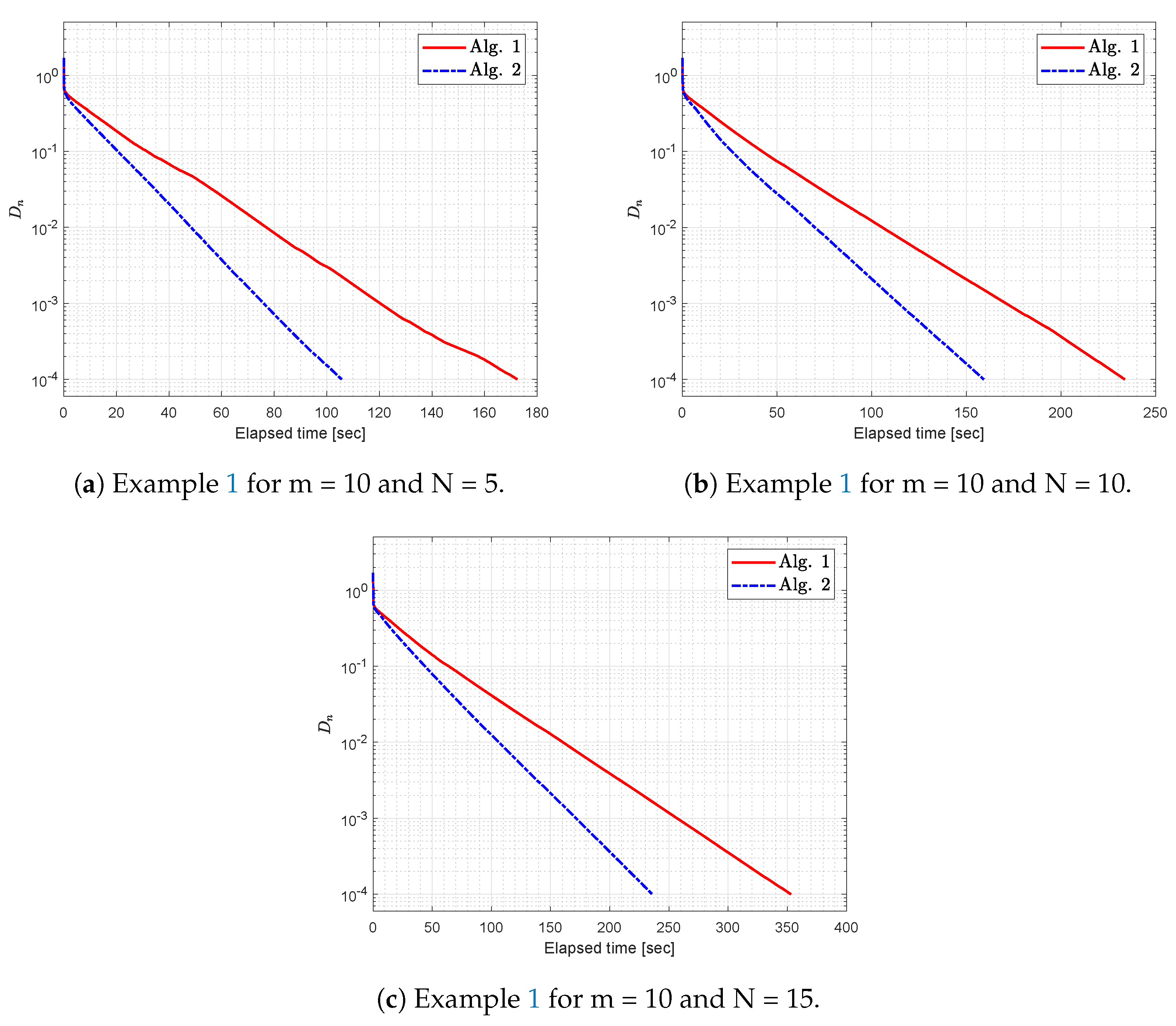
- Figure 3 and Table 2 display the behavior of both algorithms while the number of problems N varies. It could be said that the performance of algorithms also depends on the number of problems involved. In this scenario, we can see that roughly the same number of iterations are required, but the execution time depends entirely on the number of problems N.
- (iii)
- (iv)
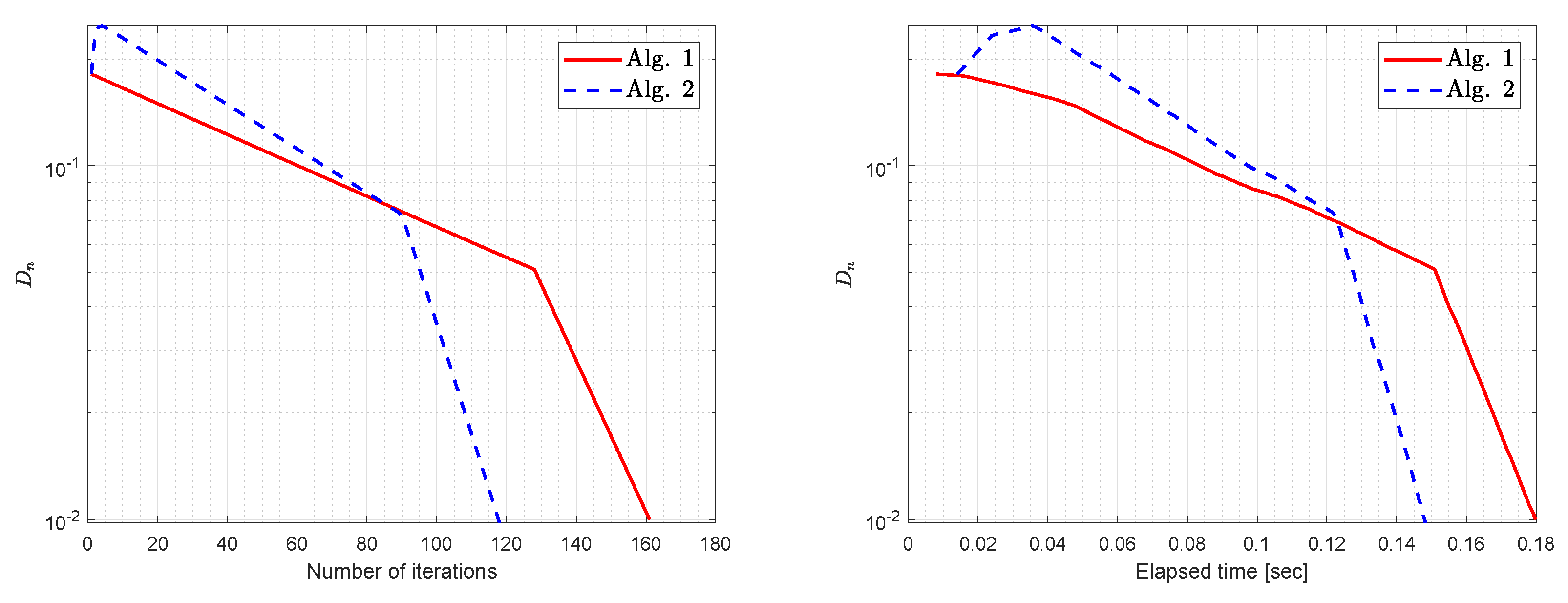
- Based on the progress of the numerical results, we find that our methods are effective and successful in finding solutions for VIP and our algorithms converges faster than the algorithms of Hieu [19].
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hartman, P.; Stampacchia, G. On some non-linear elliptic differential-functional equations. Acta Math. 1966, 115, 271–310. [Google Scholar] [CrossRef]
- Aubin, J.P.; Ekeland, I. Applied Nonlinear Analysis; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Baiocchi, C.; Capelo, A. Variational and Quasivariational Inequalities. In Applications to Free Boundary Problems; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Glowinski, R.; Lions, J.L.; Trémolières, R. Numerical Analysis of Variational Inequalities; North-Holland: Amsterdam, The Netherlands, 1981. [Google Scholar]
- Konnov, I.V. Modification of the extragradient method for solving variational inequalities and certain optimization problems. USSR Comput. Math. Math. Phys. 1989, 27, 120–127. [Google Scholar]
- Kinderlehrer, D.; Stampacchia, G. An Introduction to Variational Inequalities and Their Applications; Academic Press: New York, NY, USA, 1980. [Google Scholar]
- Konnov, I.V. Combined Relaxation Methods for Variational Inequalities; Springer: Berlin, Germany, 2001. [Google Scholar]
- Marcotte, P. Applications of Khobotov’s algorithm to variational and network equlibrium problems. Inf. Syst. Oper. Res. 1991, 29, 258–270. [Google Scholar]
- Facchinei, F.; Pang, J.S. Finite-Dimensional Variational Inequalities and Complementarity Problems; Springer Series in Operations Research; Springer: New York, NY, USA, 2003; Volume II. [Google Scholar]
- Korpelevich, G.M. The extragradient method for finding saddle points and other problems. Ekon. Mat. Metod. 1976, 12, 747–756. [Google Scholar]
- Censor, Y.; Gibali, A.; Reich, S. The subgradient extragradient method for solving variational inequalities in Hilbert space. J. Optim. Theory Appl. 2011, 148, 318–335. [Google Scholar] [CrossRef] [PubMed]
- Censor, Y.; Gibali, A.; Reich, S. Strong convergence of subgradient extragradient methods for the variational inequality problem in Hilbert space. Optim. Methods Softw. 2011, 26, 827–845. [Google Scholar] [CrossRef]
- Censor, Y.; Chen, W.; Combettes, P.L.; Davidi, R.; Herman, G.T. On the effectiveness of projection methods for convex feasibility problems with linear inequality constraints. Comput. Optim. Appl. 2011. [Google Scholar] [CrossRef]
- Hieu, D.V.; Anh, P.K.; Muu, L.D. Modified hybrid projection methods for finding common solutions to variational inequality problems. Comput. Optim. Appl. 2017, 66, 75–96. [Google Scholar] [CrossRef]
- Hieu, D.V. Parallel hybrid methods for generalized equilibrium problems and asymptotically strictly pseudocontractive mappings. J. Appl. Math. Comput. 2016. [Google Scholar] [CrossRef]
- Yamada, I. The hybrid steepest descent method for the variational inequality problem over the intersection of fixed point sets of nonexpansive mappings. In Inherently Parallel Algorithms in Feasibility and Optimization and Their Applications; Butnariu, D., Censor, Y., Reich, S., Eds.; Elsevier: Amsterdam, The Netherlands, 2001; pp. 473–504. [Google Scholar]
- Yao, Y.; Liou, Y.C. Weak and strong convergence of Krasnoselski-Mann iteration for hierarchical fixed point problems. Inverse Probl. 2008. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Borwein, J.M. On projection algorithms for solving convex feasibility problems. SIAM Rev. 1996, 38, 367–426. [Google Scholar] [CrossRef]
- Stark, H. Image Recovery Theory and Applications; Academic: Orlando, FL, USA, 1987. [Google Scholar]
- Censor, Y.; Gibali, A.; Reich, S.; Sabach, S. Common solutions to variational inequalities. Set Val. Var. Anal. 2012, 20, 229–247. [Google Scholar] [CrossRef]
- Anh, P.K.; Hieu, D.V. Parallel and sequential hybrid methods for a finite family of asymptotically quasi ϕ-nonexpansive mappings. J. Appl. Math. Comput. 2015, 48, 241–263. [Google Scholar] [CrossRef]
- Anh, P.K.; Hieu, D.V. Parallel hybrid methods for variational inequalities, equilibrium problems and common fixed point problems. Vietnam J. Math. 2015. [Google Scholar] [CrossRef]
- Hieu, D.V. Parallel and cyclic hybrid subgradient extragradient methods for variational inequalities. Afr. Mat. 2016. [Google Scholar] [CrossRef]
- Alber, Y.; Ryazantseva, I. Nonlinear Ill-Posed Problems of Monotone Type; Spinger: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Takahashi, W. Nonlinear Functional Analysis; Yokohama Publishers: Yokohama, Japan, 2000. [Google Scholar]
- Martinez-Yanes, C.; Xu, H.K. Strong convergence of the CQ method for fixed point iteration processes. Nonlinear Anal. 2006, 64, 2400–2411. [Google Scholar] [CrossRef]
- Rockafellar, R.T. On the maximality of sums of nonlinear monotone operators. Trans. Am. Math. Soc. 1970, 149, 75–88. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | m | Algorithm 1 | Algorithm 2 | ||
|---|---|---|---|---|---|
| Number of Iter. | CPU (s) | Number of Iter. | CPU (s) | ||
| 20 | 2 | 269 | 43.01771 | 185 | 28.6043 |
| 20 | 5 | 788 | 121.0213 | 529 | 83.1379 |
| 20 | 10 | 2493 | 391.9032 | 1066 | 245.6833 |
| 20 | 20 | 7780 | 765.5070 | 3038 | 485.9237 |
| N | m | Algorithm 1 | Algorithm 2 | ||
|---|---|---|---|---|---|
| Number of Iter. | CPU (s) | Number of Iter. | CPU (s) | ||
| 5 | 10 | 3101 | 172.4298 | 2267 | 105.7254 |
| 10 | 10 | 3009 | 233.6499 | 2340 | 159.1928 |
| 15 | 10 | 3254 | 353.0176 | 2109 | 235.8372 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hammad, H.A.; ur Rehman, H.; De la Sen, M. Advanced Algorithms and Common Solutions to Variational Inequalities. Symmetry 2020, 12, 1198. https://doi.org/10.3390/sym12071198
Hammad HA, ur Rehman H, De la Sen M. Advanced Algorithms and Common Solutions to Variational Inequalities. Symmetry. 2020; 12(7):1198. https://doi.org/10.3390/sym12071198
Chicago/Turabian StyleHammad, Hasanen A., Habib ur Rehman, and Manuel De la Sen. 2020. "Advanced Algorithms and Common Solutions to Variational Inequalities" Symmetry 12, no. 7: 1198. https://doi.org/10.3390/sym12071198
APA StyleHammad, H. A., ur Rehman, H., & De la Sen, M. (2020). Advanced Algorithms and Common Solutions to Variational Inequalities. Symmetry, 12(7), 1198. https://doi.org/10.3390/sym12071198