An Improved Fast Affine Motion Estimation Based on Edge Detection Algorithm for VVC

Abstract
1. Introduction
2. Related Works
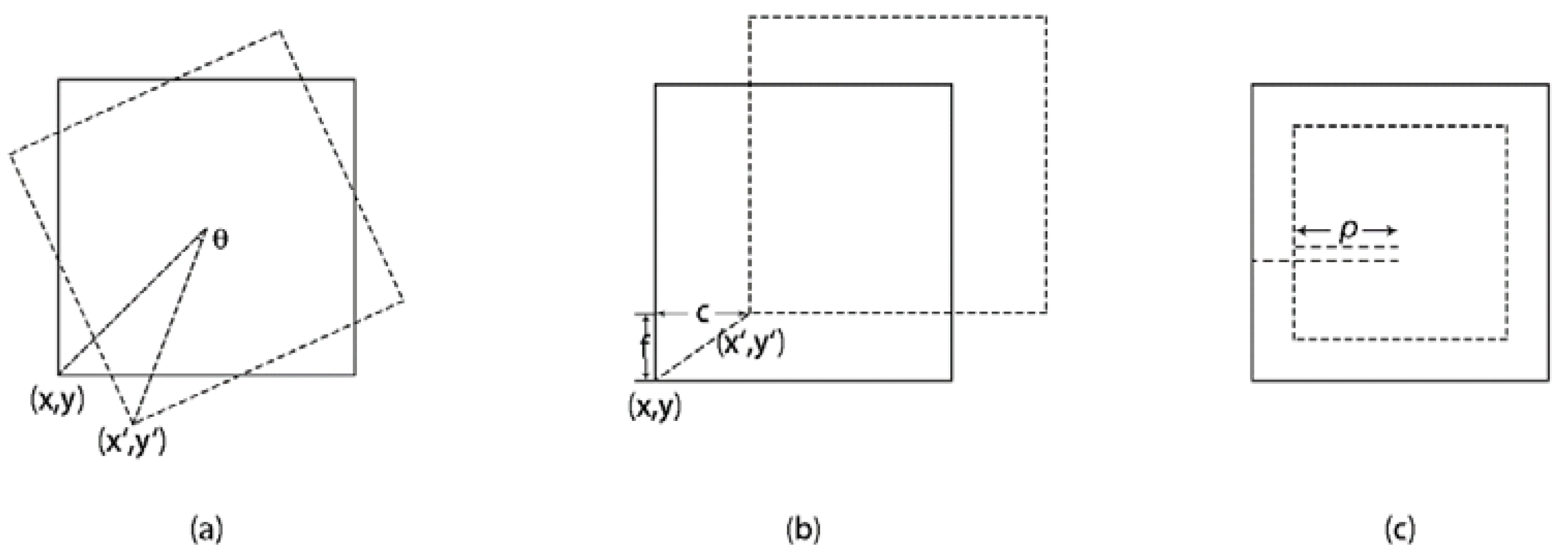
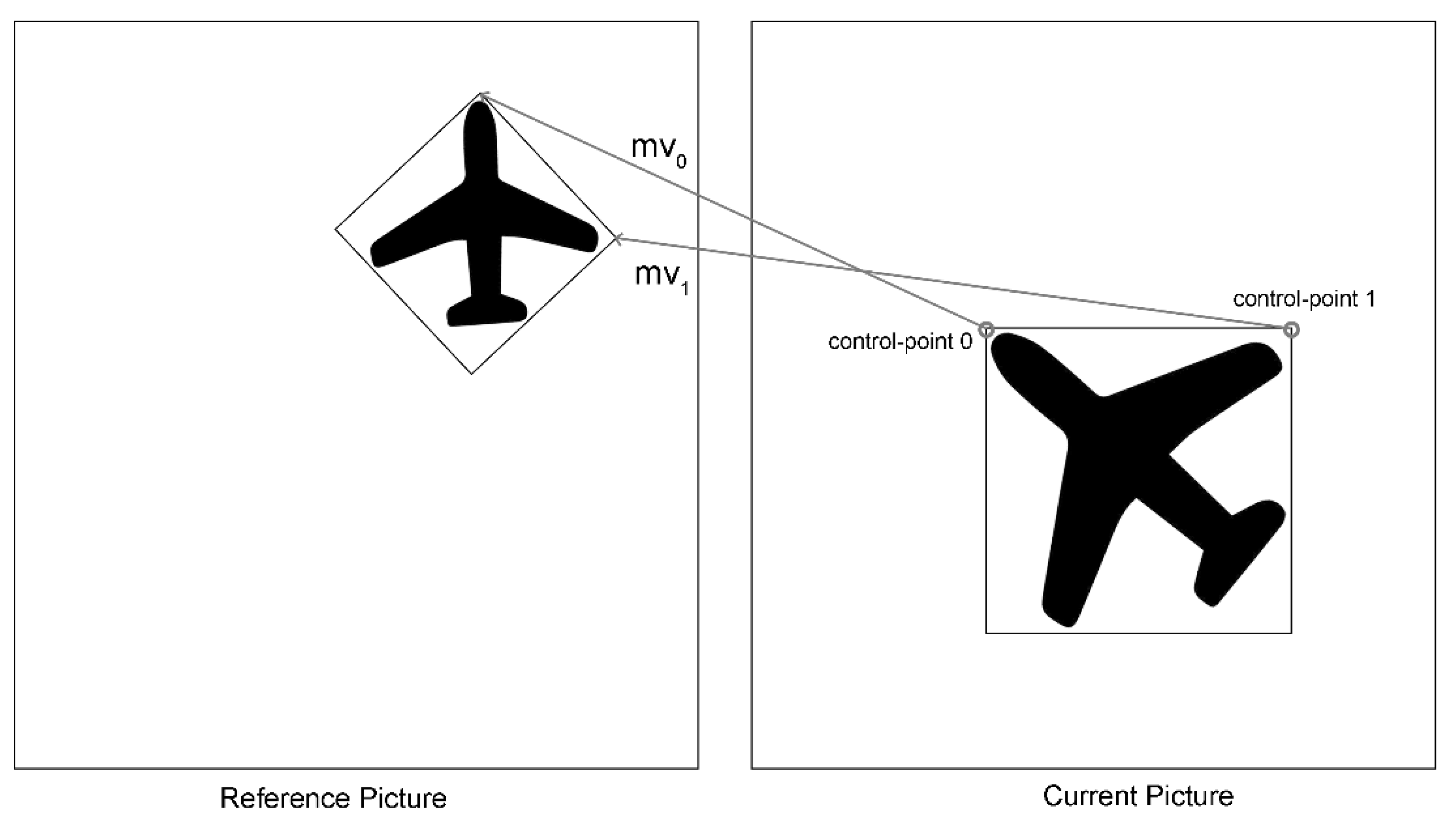
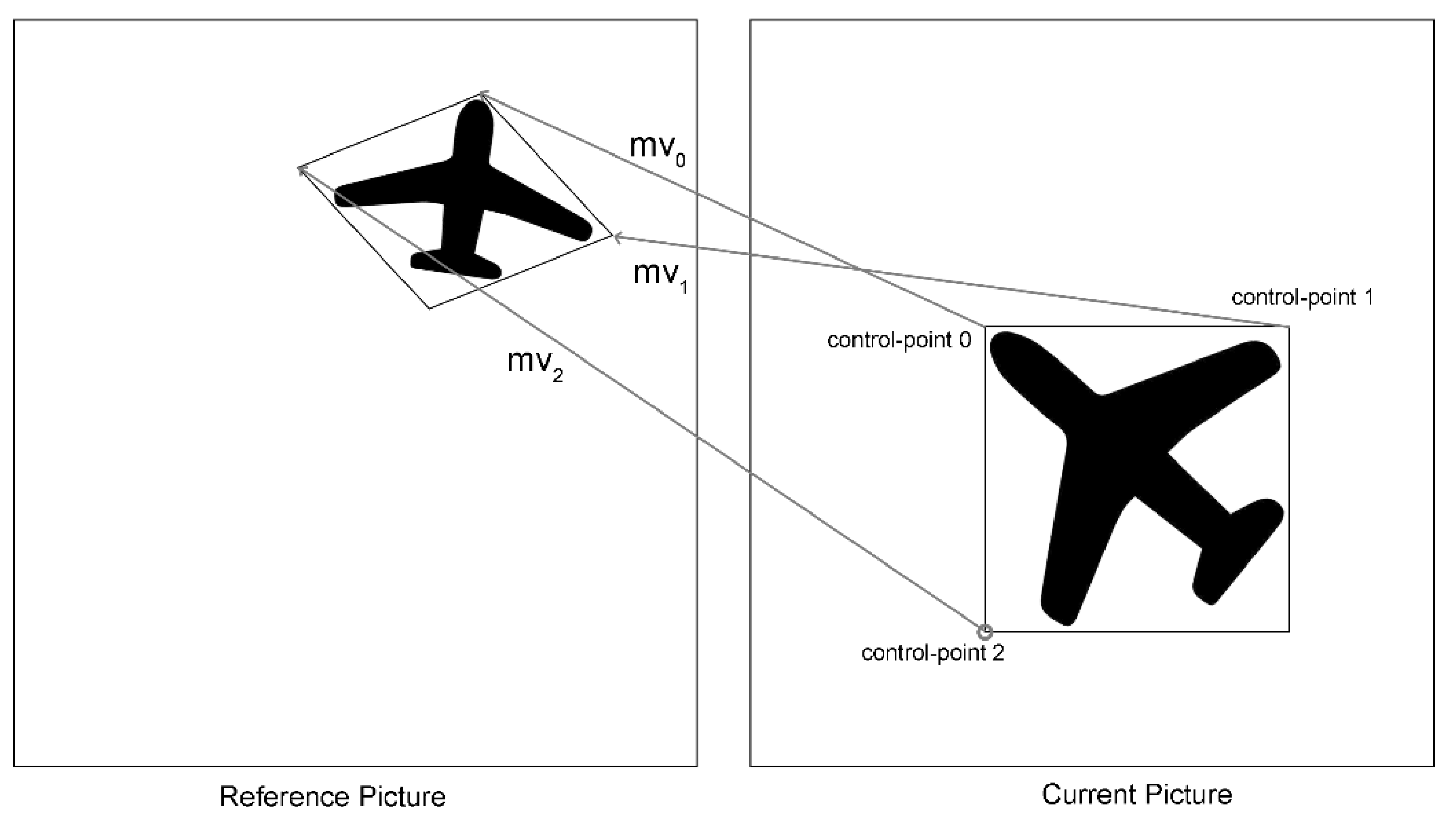
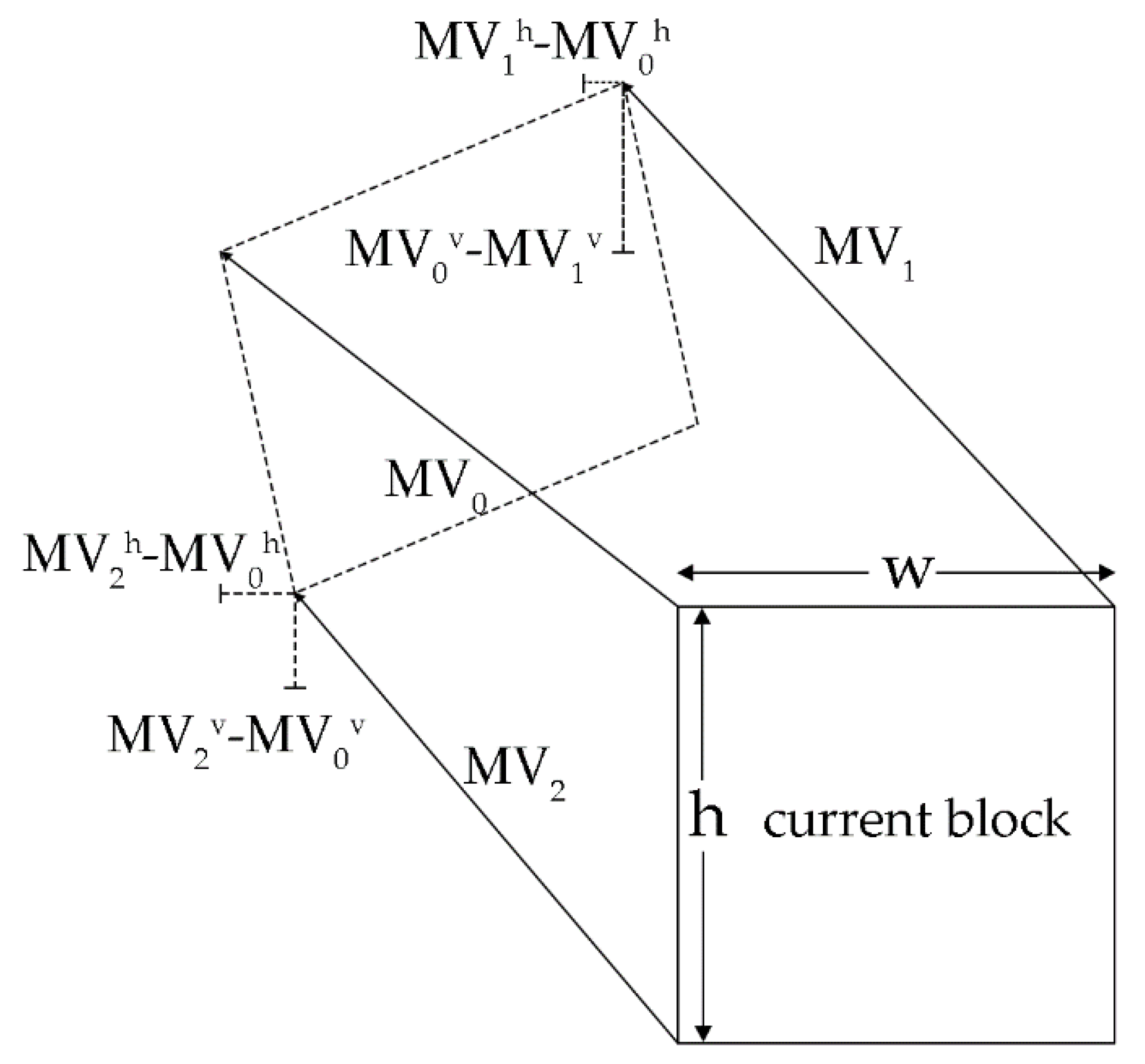
2.1. Affine Motion Model
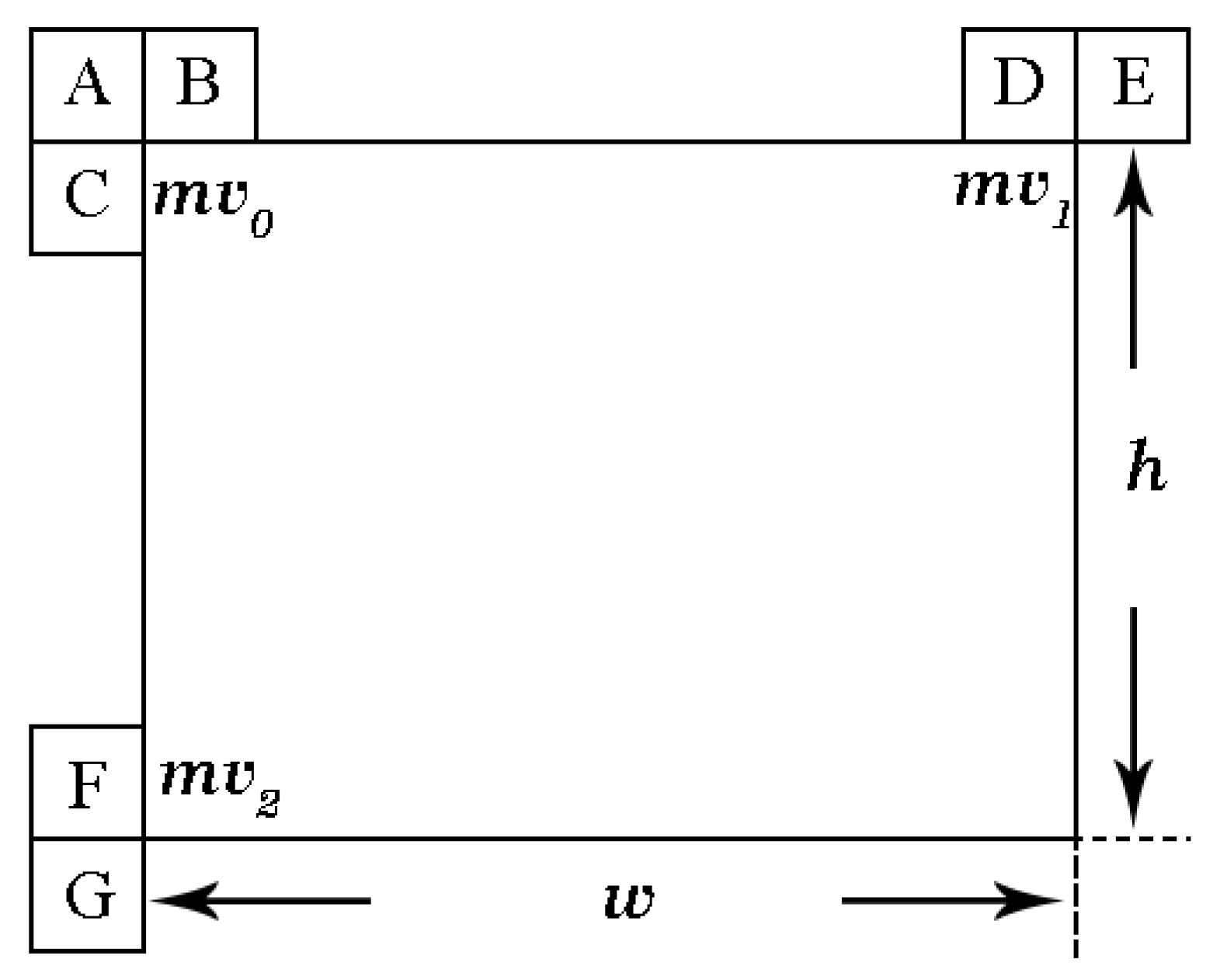
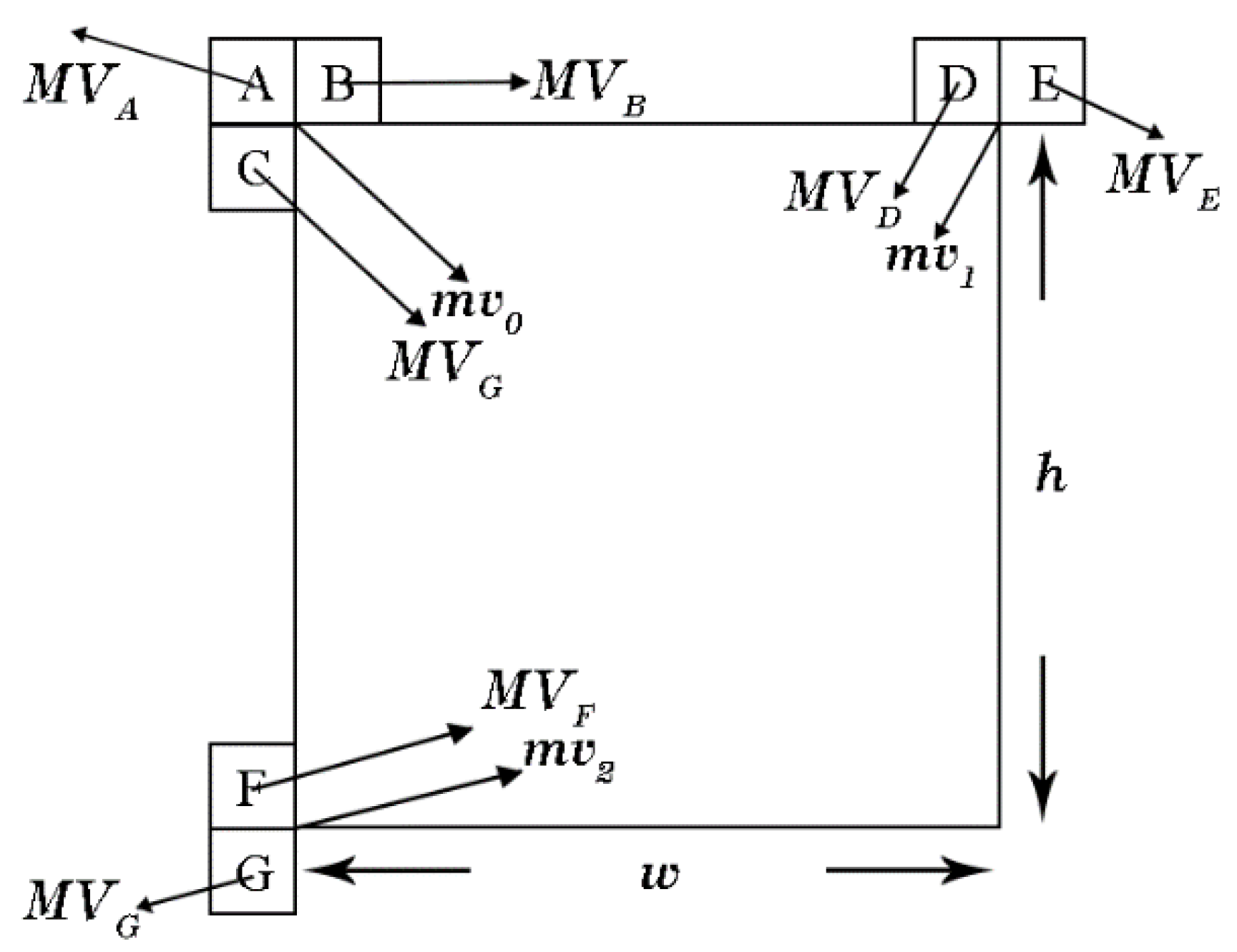
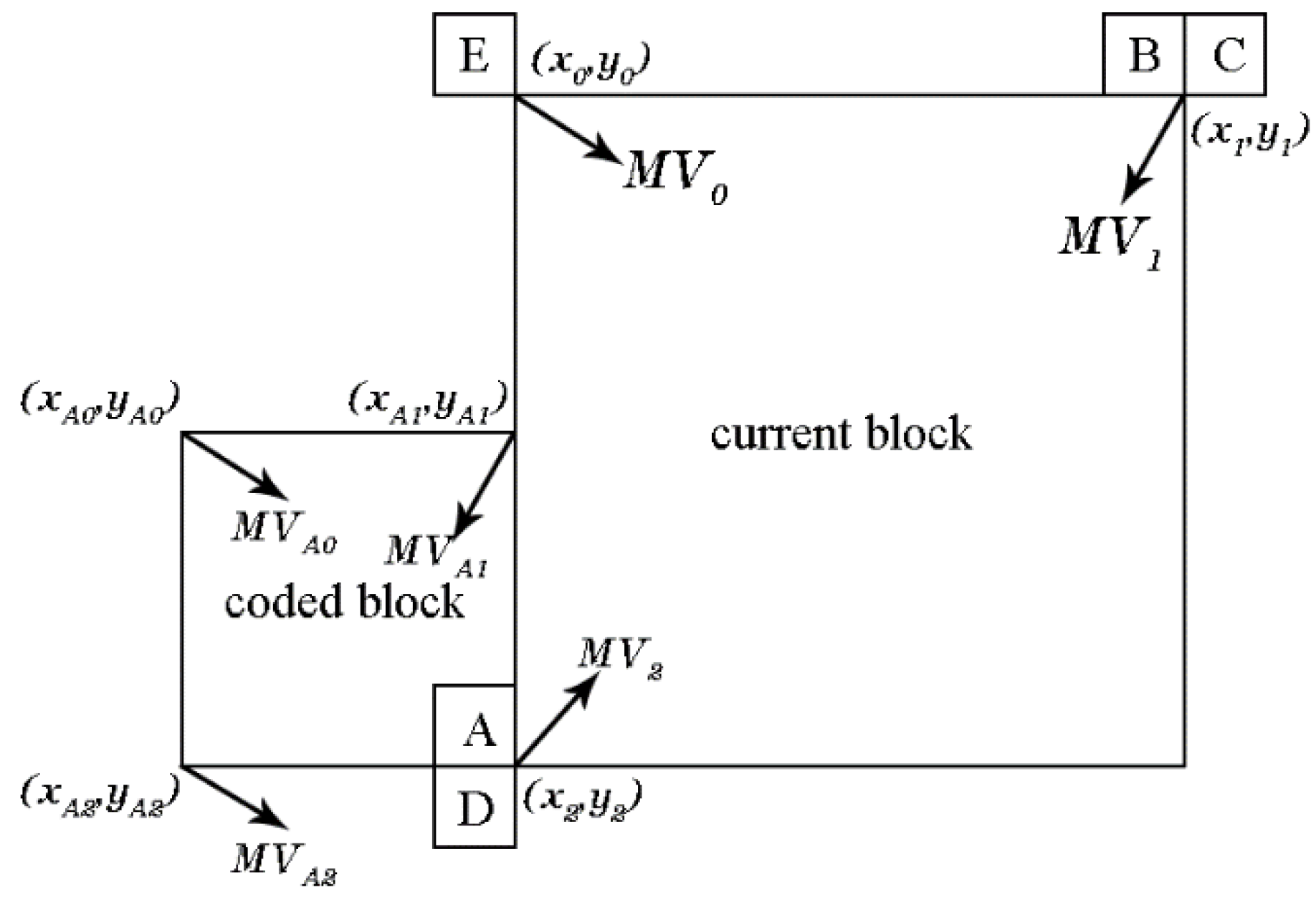
2.2. AMC
- The encoder solves the parameters of the current blocks according to , , and assumes the unchecked neighboring blocks use the same parameters a, b.
- Then the encoder searches for the prediction units (PUs) that contain block A and obtain the information regarding , and .
- The and of the current block are calculated by using the MVs and relative position of the neighboring block.
- An additional step is needed to calculate in the 6-parameter affine motion model.
3. Proposed Algorithms
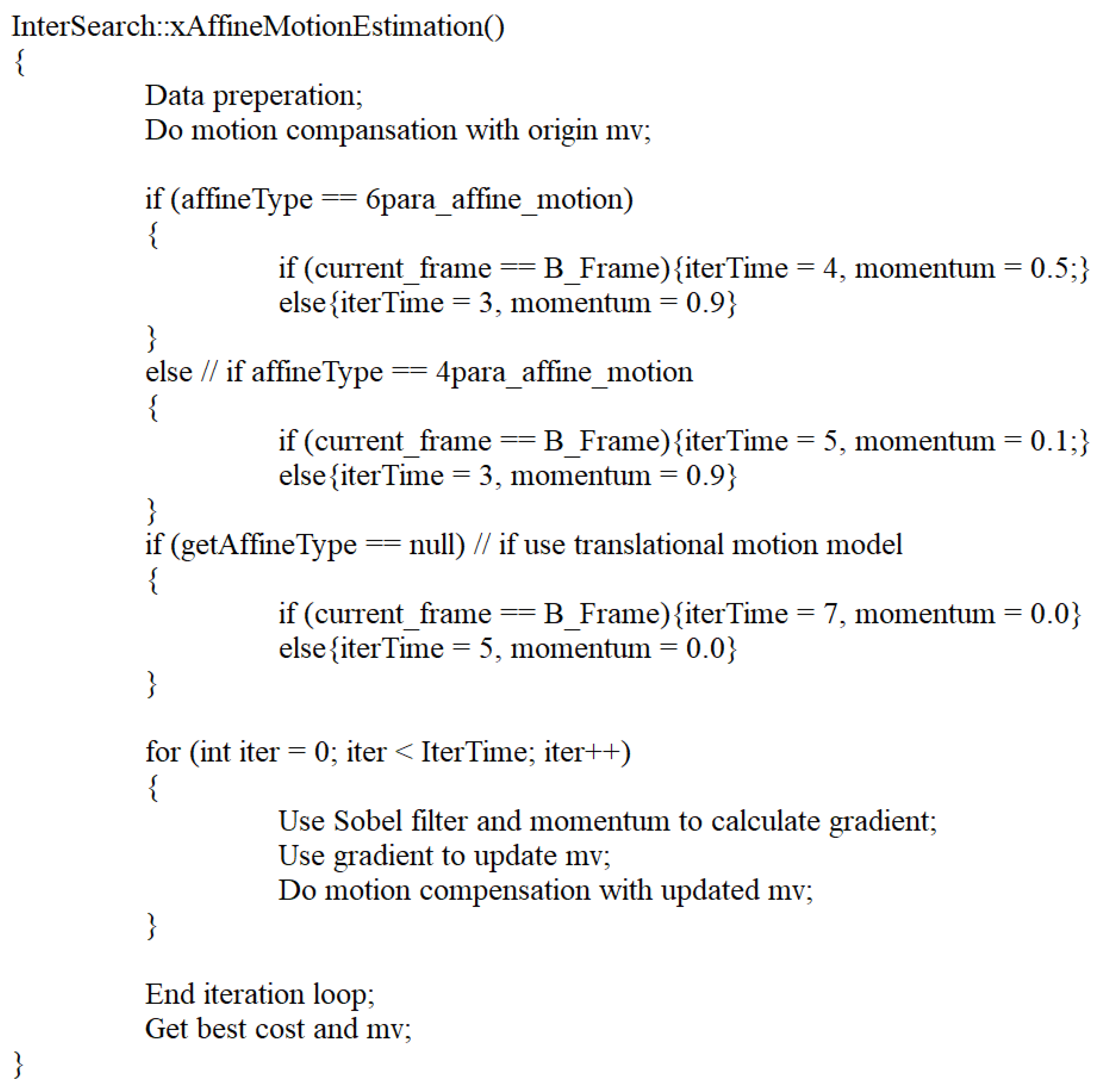
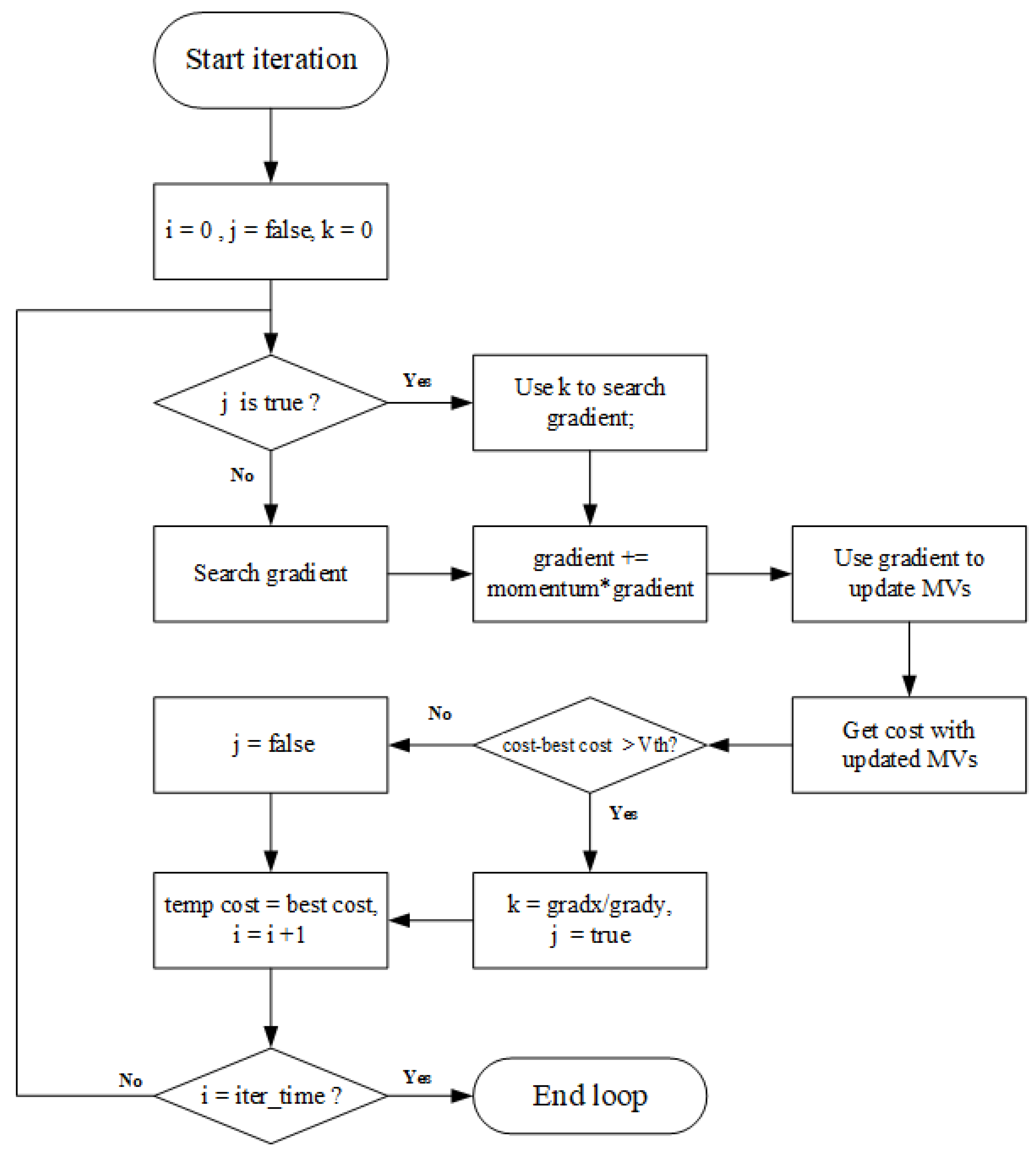
3.1. Fast Gradient Prediction
- Initialize iteration time i, sign j and coefficient k at the beginning of iteration.
- Check j and enable the fast gradient search when the sign is true, otherwise enable the conventional gradient search. The fast gradient search uses the coefficient k and the gradient in the horizontal or vertical direction to predict the gradient in another direction. In this case, only one array of gradient is called upon to solve the derivate.
- Add momentum to update the gradient and then use gradient to update the MVs and obtain cost with the updated MVs.
- Use the cost change of distortion as the sign for enabling fast gradient search. Set j to be true and update k with the gradient when:
- Update i and the temp cost with the best cost in the current iteration. The encoder ends the iteration loops when i reaches the maximum of iteration time.
3.2. AAMVP for 6-Parameters
4. Experimental Results
4.1. Simulation Setup
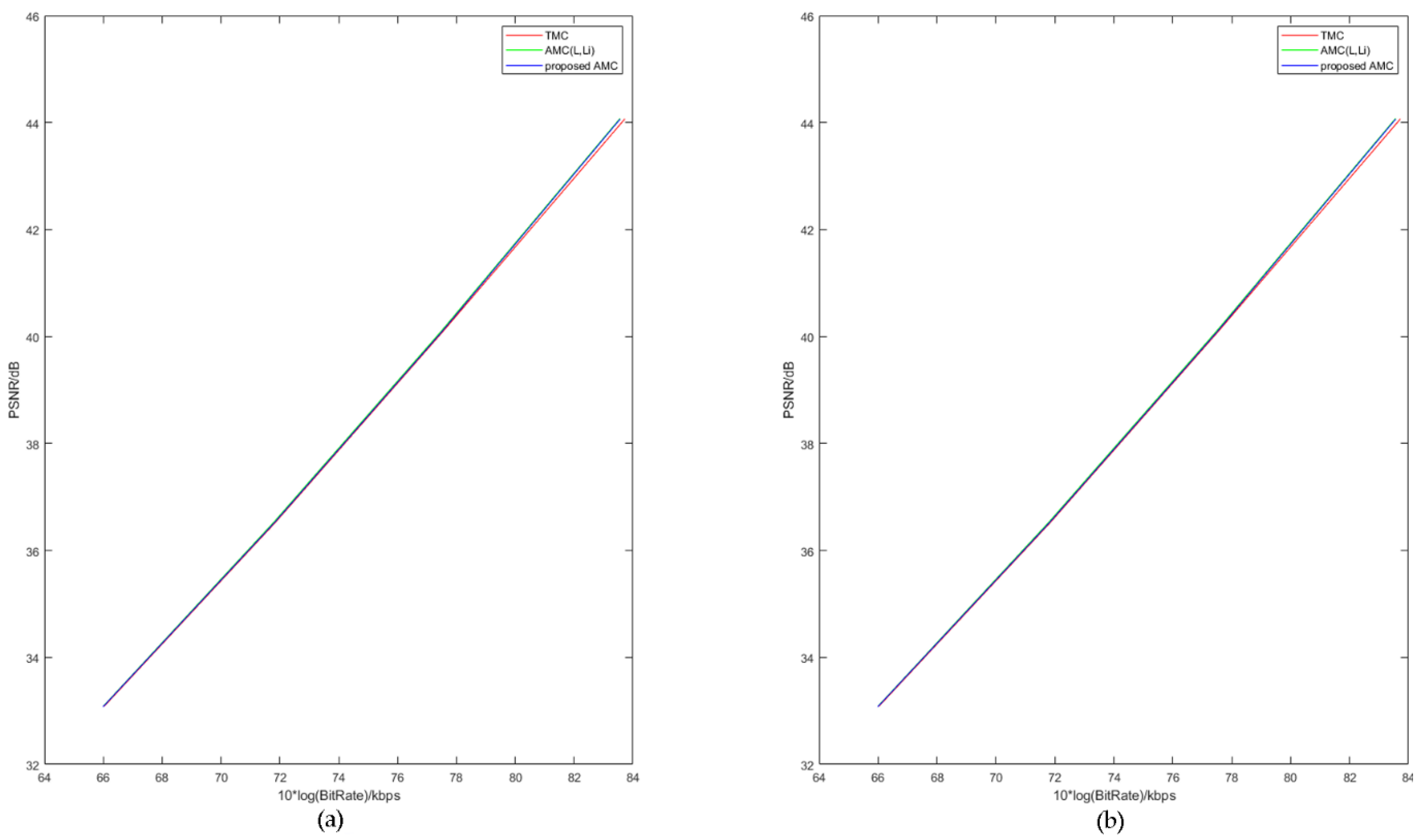
4.2. Performance and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wiegand, T.; Sullivan, G.J.; Bjøntegaard, G.; Luthra, A. Overview of the H.264/AVC video coding standard. IEEE Trans. Circuits Syst. Video Technol. 2003, 13, 560–576. [Google Scholar] [CrossRef]
- Sullivan, G.J.; Ohm, J.-R.; Wiegand, T.; Han, W.-J. Overview of the High Efficiency Video Coding (HEVC) Standard. Circuits Syst. Video Technol. 2012, 22, 1649–1668. [Google Scholar] [CrossRef]
- Ohm, J.-R.; Sullivan, G.J.; Schwarz, H.; Tan, T.K.; Wiegand, T. Comparison of the Coding Efficiency of Video Coding Standards—Including High Efficiency Video Coding (HEVC). IEEE Trans. Circuits Syst. Video Technol. 2012, 22, 1669–1684. [Google Scholar] [CrossRef]
- Bross, B. Versatile Video Coding (Draft 1); JVET-J1001; Joint Video Exploration Team (JVET): San Diego, CA, USA, 2018. [Google Scholar]
- Li, L.; Li, H.; Lv, Z.; Yang, H. An affine motion compensation framework for High Efficiency Video Coding. In Proceedings of the 2015 IEEE International Symposium on Circuits and Systems (ISCAS), Lisbon, Portugal, 24–27 May 2015; pp. 525–528. [Google Scholar]
- Zhang, K.; Chen, Y.; Zhang, L.; Chien, W.; Karczewicz, M. An Improved Framework of Affine Motion Compensation in Video Coding. IEEE Trans. Image Process. 2019, 28, 1456–1469. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.-W.; Chien, W.J.; Chuang, H.C. Description of SDR, HDR and 360° Video Coding Technology Proposal by Qualcomm and Technicolor—Low and High Complexity Versions; Document JVET–J0021; Joint Video Exploration Team (JVET): San Diego, CA, USA, 2018. [Google Scholar]
- Seferidis, V.E.; Ghanbari, M. General approach to block-matching motion estimation. Opt. Eng. 1993, 32, 1464–1474. [Google Scholar] [CrossRef]
- Huang, H.; Woods, J.W.; Zhao, Y.; Bai, H. Control-point representation and differential coding affine-motion compensation. IEEE Trans. Circuits Syst. Video Technol. 2013, 23, 1651–1660. [Google Scholar] [CrossRef]
- Li, L.; Li, H.; Liu, D.; Li, Z.; Yang, H.; Lin, S.; Chen, H.; Wu, F. An Efficient Four-Parameter Affine Motion Model for Video Coding. IEEE Trans. Circuits Syst. Video Technol. 2018, 28, 1934–1948. [Google Scholar] [CrossRef]
- Li, B.; Xu, J.; Li, H. Parsing robustness in high efficiency video coding—Analysis and improvement. In Proceedings of the IEEE Visual Communications and Image Processing (VCIP), Tainan, Taiwan, 6–9 November 2011; pp. 1–4. [Google Scholar]
- Zhu, W.; Ding, W.; Xu, J.; Shi, Y.; Yin, B. Hash-Based Block Matching for Screen Content Coding. IEEE Trans Multimed. 2015, 17, 935–944. [Google Scholar] [CrossRef]
- Tsai, T.; Su, S.; Lee, T. Fast mode decision method based on edge feature for HEVC inter-prediction. IET Image Process. 2018, 12, 644–651. [Google Scholar] [CrossRef]
- Shi, W.; Jiang, X.; Song, T.; Shimamoto, T. Edge information based fast selection algorithm for intra prediction of HEVC. In Proceedings of the 2014 IEEE Asia Pacific Conference on Circuits and Systems (APCCAS), Ishigaki, Okinawa, Japan, 17–20 November 2014; pp. 17–20. [Google Scholar]
- Wieckowski, A.; Ma, J.; Schwarz, H.; Marpe, D.; Wiegand, T. Fast Partitioning Decision Strategies for The Upcoming Versatile Video Coding (VVC) Standard. In Proceedings of the 2019 IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–25 September 2019; pp. 4130–4134. [Google Scholar]
- VTM-7.0. Available online: https://vcgit.hhi.fraunhofer.de/jvet/VVCSoftware_VTM/-/tree/VTM-7.0. (accessed on 15 December 2019).
- Suehring, K.; Li, X. JVET Common Test. Conditions and Software Reference Configurations; Document JVET-G1010; Joint Video Experts Team: San Diego, CA, USA, 2017. [Google Scholar]
- Bjøntegaard, G. Calculation of Average PSNR Differences between RD Curves; Document ITU-T SG.16 Q.6, VCEG-M33; Video Coding Experts Group (VCEG): Austin, TX, USA., 2001. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Processor | Inter(R) Core (TM) i5-8400 CPU @ 2.80GHz |
|---|---|
| Core number | 6 |
| memory | 16.0GB |
| cache | 9MB |
| Operating system | Windows 10 × 64 |
| IDE | Microsoft Visual Studio 16 2019 |
| Class | Sequences | Encoded Frames | AMC (L. Li et al.) | AMC with Momentum | ||
|---|---|---|---|---|---|---|
| BDBR (%) | ΔT (%) | BDBR (%) | ΔT (%) | |||
| A | Traffic | 60 | −15.83 | 21.31% | −15.85 | 21.36% |
| PeopleOnStreet | 60 | −16.23 | 22.09% | −16.24 | 22.11% | |
| B | ParkScene | 120 | −17.04 | 17.83% | −17.08 | 17.89% |
| BQTerrace | 120 | −16.2 | 19.57% | −16.23 | 19.74% | |
| BasketballDrive | 100 | −23.32 | 18.61% | −23.35 | 18.70% | |
| Cactus | 100 | −31.13 | 19.81% | −31.16 | 19.84% | |
| kimono | 120 | −18.89 | 20.08% | −18.9 | 20.09% | |
| C | BQMall | 240 | −15.71 | 21.55% | −15.71 | 21.59% |
| PartyScene | 200 | −20.01 | 22.63% | −20.04 | 22.65% | |
| RaceHorses | 120 | −19.73 | 25.65% | −19.74 | 25.66% | |
| BasketballDrill | 200 | −21.17 | 20.17% | −21.2 | 20.18% | |
| D | BQSquare | 240 | −22.99 | 18.78% | −23.02 | 18.79% |
| BlowingBubbles | 200 | −15.21 | 18.18% | −15.23 | 18.21% | |
| BasketballPass | 200 | −21.8 | 21.61% | −21.82 | 21.64% | |
| E | Johnny | 120 | −20.75 | 39.62% | −20.75 | 39.63% |
| KiristenAndSara | 120 | −18.74 | 23.50% | −18.77 | 23.54% | |
| FourPeople | 120 | −20.24 | 24.01% | −20.25 | 24.02% | |
| F | ChinaSpeed | 150 | −70.52 | 14.28% | −70.54 | 14.30% |
| SlideShow | 200 | −41.31 | 19.66% | −41.35 | 19.67% | |
| SlideEditing | 150 | −19.13 | 14.55% | −19.15 | 14.58% | |
| BasketballDrillText | 200 | −19.98 | 21.08% | −20.01 | 21.11% | |
| average | −23.14 | 21.17 | −23.16 | 21.20% | ||
| Class | Sequences | Encoded Frames | AMC (L. Li et al.) | AMC with AAMVP | ||
|---|---|---|---|---|---|---|
| BDBR (%) | ΔT (%) | BDBR (%) | ΔT (%) | |||
| A | Traffic | 60 | −15.83 | 21.31% | −15.83 | 21.09% |
| PeopleOnStreet | 60 | −16.23 | 22.09% | −16.23 | 21.78% | |
| B | ParkScene | 120 | −17.04 | 17.83% | −17.04 | 17.42% |
| BQTerrace | 120 | −16.2 | 19.57% | −16.2 | 19.14% | |
| BasketballDrive | 100 | −23.32 | 18.61% | −23.32 | 17.02% | |
| Cactus | 100 | −31.13 | 19.81% | −31.13 | 19.17% | |
| kimono | 120 | −18.89 | 20.08% | −18.89 | 19.44% | |
| C | BQMall | 240 | −15.71 | 21.55% | −15.71 | 21.04% |
| PartyScene | 200 | −20.01 | 22.63% | −20.01 | 22.20% | |
| RaceHorses | 120 | −19.73 | 25.65% | −19.73 | 24.76% | |
| BasketballDrill | 200 | −21.17 | 20.17% | −21.17 | 19.34% | |
| D | BQSquare | 240 | −22.99 | 18.78% | −22.99 | 18.49% |
| BlowingBubbles | 200 | −15.21 | 18.18% | −15.21 | 17.74% | |
| BasketballPass | 200 | −21.8 | 21.61% | −21.8 | 21.30% | |
| E | Johnny | 120 | −20.75 | 39.62% | −20.75 | 38.05% |
| KiristenAndSara | 120 | −18.74 | 23.50% | −18.74 | 23.11% | |
| FourPeople | 120 | −20.24 | 24.01% | −20.24 | 23.25% | |
| F | ChinaSpeed | 150 | −70.52 | 14.28% | −70.52 | 13.14% |
| SlideShow | 200 | −41.31 | 19.66% | −41.31 | 19.28% | |
| SlideEditing | 150 | −19.13 | 14.55% | −19.13 | 14.12% | |
| BasketballDrillText | 200 | −19.98 | 21.08% | −19.98 | 20.11% | |
| average | −23.14 | 21.17 | −23.14 | 20.52% | ||
| Class | Sequences | Encoded Frames | AMC (L. Li et al.) | Proposed AMC | ||
|---|---|---|---|---|---|---|
| BDBR (%) | ΔT (%) | BDBR (%) | ΔT (%) | |||
| A | Traffic | 60 | −15.83 | 21.31% | −15.71 | 14.29% |
| PeopleOnStreet | 60 | −16.23 | 22.09% | −16.09 | 14.79% | |
| B | ParkScene | 120 | −17.04 | 17.83% | −16.95 | 11.43% |
| BQTerrace | 120 | −16.20 | 19.57% | −16.15 | 12.57% | |
| BasketballDrive | 100 | −23.32 | 18.61% | −23.14 | 14.17% | |
| Cactus | 100 | −31.13 | 19.81% | −30.89 | 13.69% | |
| kimono | 120 | −18.89 | 20.08% | −18.74 | 13.60% | |
| C | BQMall | 240 | −15.71 | 21.55% | −15.57 | 15.68% |
| PartyScene | 200 | −20.01 | 22.63% | −19.86 | 15.94% | |
| RaceHorses | 120 | −19.73 | 25.65% | −19.58 | 16.87% | |
| BasketballDrill | 200 | −21.17 | 20.17% | −20.88 | 15.95% | |
| D | BQSquare | 240 | −22.99 | 18.78% | −22.63 | 13.24% |
| BlowingBubbles | 200 | −15.21 | 18.18% | −15.19 | 14.01% | |
| BasketballPass | 200 | −21.80 | 21.61% | −21.27 | 14.82% | |
| E | Johnny | 120 | −20.75 | 39.62% | −20.59 | 21.42% |
| KiristenAndSara | 120 | −18.74 | 23.50% | −18.61 | 17.07% | |
| FourPeople | 120 | −20.24 | 24.01% | −20.05 | 14.88% | |
| F | ChinaSpeed | 150 | −70.52 | 14.28% | −69.71 | 11.59% |
| SlideShow | 200 | −41.31 | 19.66% | −40.89 | 13.17% | |
| SlideEditing | 150 | −19.13 | 14.55% | −19.09 | 10.70% | |
| BasketballDrillText | 200 | −19.98 | 21.08% | −19.89 | 14.98% | |
| average | −23.14 | 21.17 | −22.93 | 14.52 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, W.; He, W.; Cui, Y. An Improved Fast Affine Motion Estimation Based on Edge Detection Algorithm for VVC. Symmetry 2020, 12, 1143. https://doi.org/10.3390/sym12071143
Ren W, He W, Cui Y. An Improved Fast Affine Motion Estimation Based on Edge Detection Algorithm for VVC. Symmetry. 2020; 12(7):1143. https://doi.org/10.3390/sym12071143
Chicago/Turabian StyleRen, Weizheng, Wei He, and Yansong Cui. 2020. "An Improved Fast Affine Motion Estimation Based on Edge Detection Algorithm for VVC" Symmetry 12, no. 7: 1143. https://doi.org/10.3390/sym12071143
APA StyleRen, W., He, W., & Cui, Y. (2020). An Improved Fast Affine Motion Estimation Based on Edge Detection Algorithm for VVC. Symmetry, 12(7), 1143. https://doi.org/10.3390/sym12071143