On Two-Derivative Runge–Kutta Type Methods for Solving u‴ = f(x,u(x)) with Application to Thin Film Flow Problem



Abstract
1. Introduction
2. The Formulation of TDRKT Methods
3. Construction of TDRKT Methods
- (i)
- The graph
 expressed as , with one meagre vertex (root of the rooted tree); the graph
expressed as , with one meagre vertex (root of the rooted tree); the graph expessed as ; the graph
expessed as ; the graph denoted as ; and lastly,
denoted as ; and lastly, denoted as ;
denoted as ; - (ii)
- If are different from , then the graph can be obtained as the roots of connecting downward to white circle vertex, combining the roots of into this black triangle vertex, followed by joining the roots downward to white rectangle vertex and subsequently to the roots into a new black circle vertex (root of ). It is expressed asin which
 is root of the rooted tree t.
is root of the rooted tree t.





- (i)
- The meagre vertex is the root of every rooted tree.
- (ii)
- The offspring of meagre vertex must consist of only one white circle vertex.
- (ii)
- The offspring of white circle vertex must consist of only one black triangle vertex.
- (iv)
- The offspring of black triangle vertex must consist of only one white rectangle vertex.
- (i)
- (ii)
- for ,For every , the order ρ represents the amount of vertices t. The set comprised of all rooted trees with order k is expressed as .
- (i)
- ;
- (ii)
- for ,
- (i)
- ;
- (ii)
- for with , and distinct,in which is the product of for .
- (i)
- ;
- (ii)
- for
- (i)
- ;
- (ii)
- for whereby distinct, distinct and distinct,where is the product of
3.1. Analytical Solution and Exact Derivative on B-Series
3.2. Numerical Solution and Numerical Derivative on B-Series
- The order conditions for u:
- Fourth order:
- Fifth order:
- Sixth order:
- The order conditions for :
- Third order:
- Fourth order:
- Fifth order:
- Sixth order:
- The order conditions for :
- Second order:
- Third order:
- Fourth order:
- Fifth order:
- Sixth order:
3.3. Two-Stage TDRKT Method of Order Four
3.4. Three-Stage TDRKT Method of Order Five
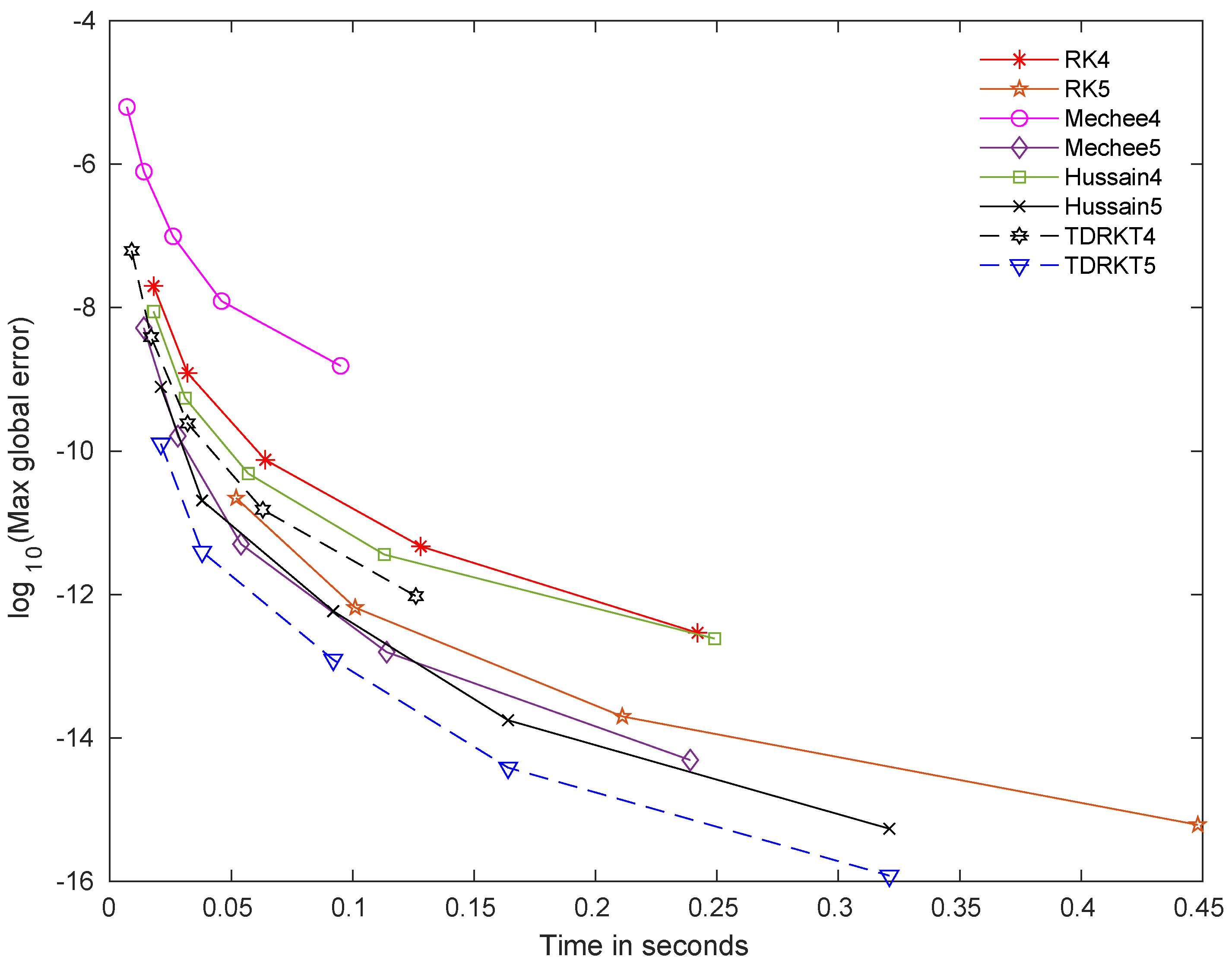
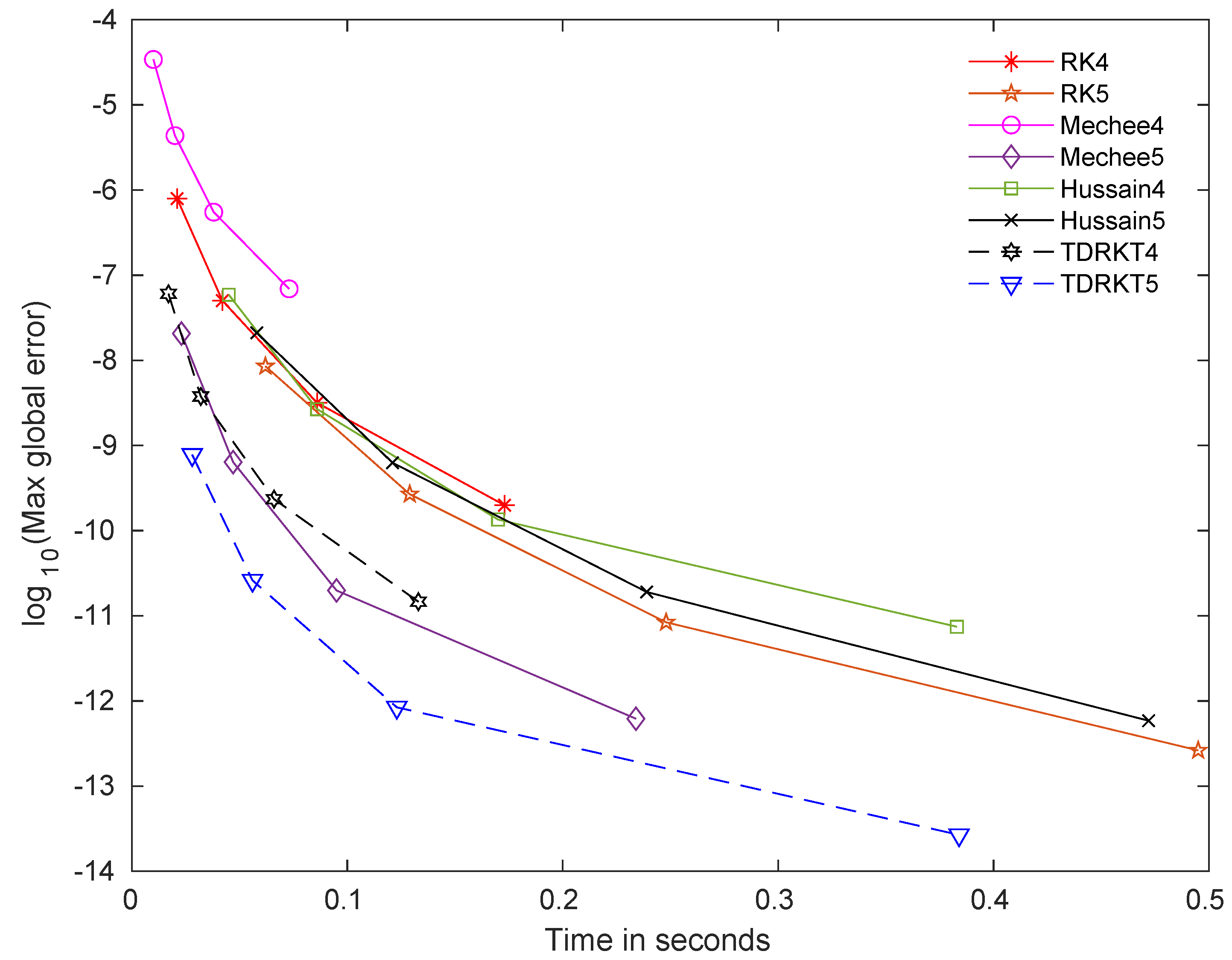
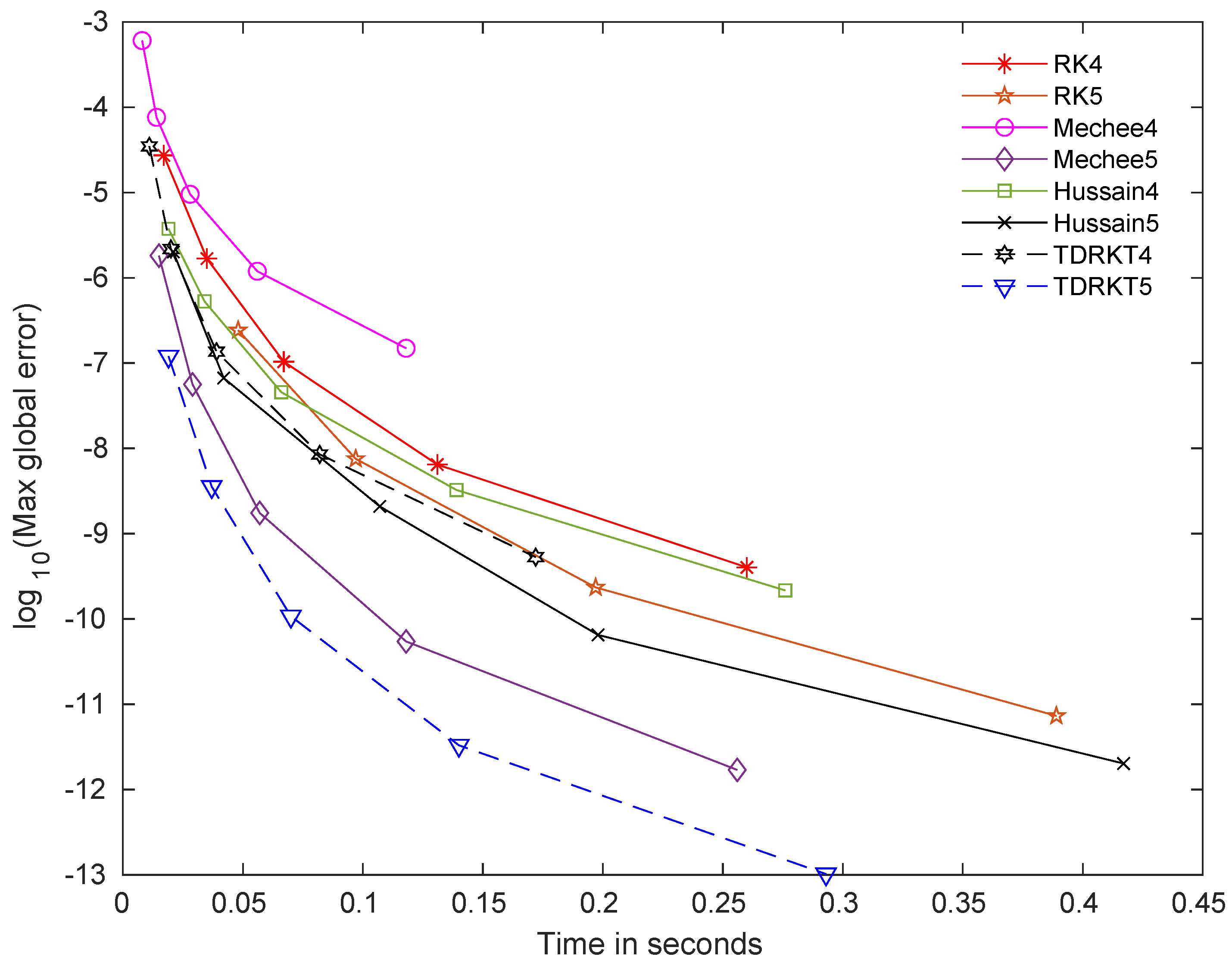
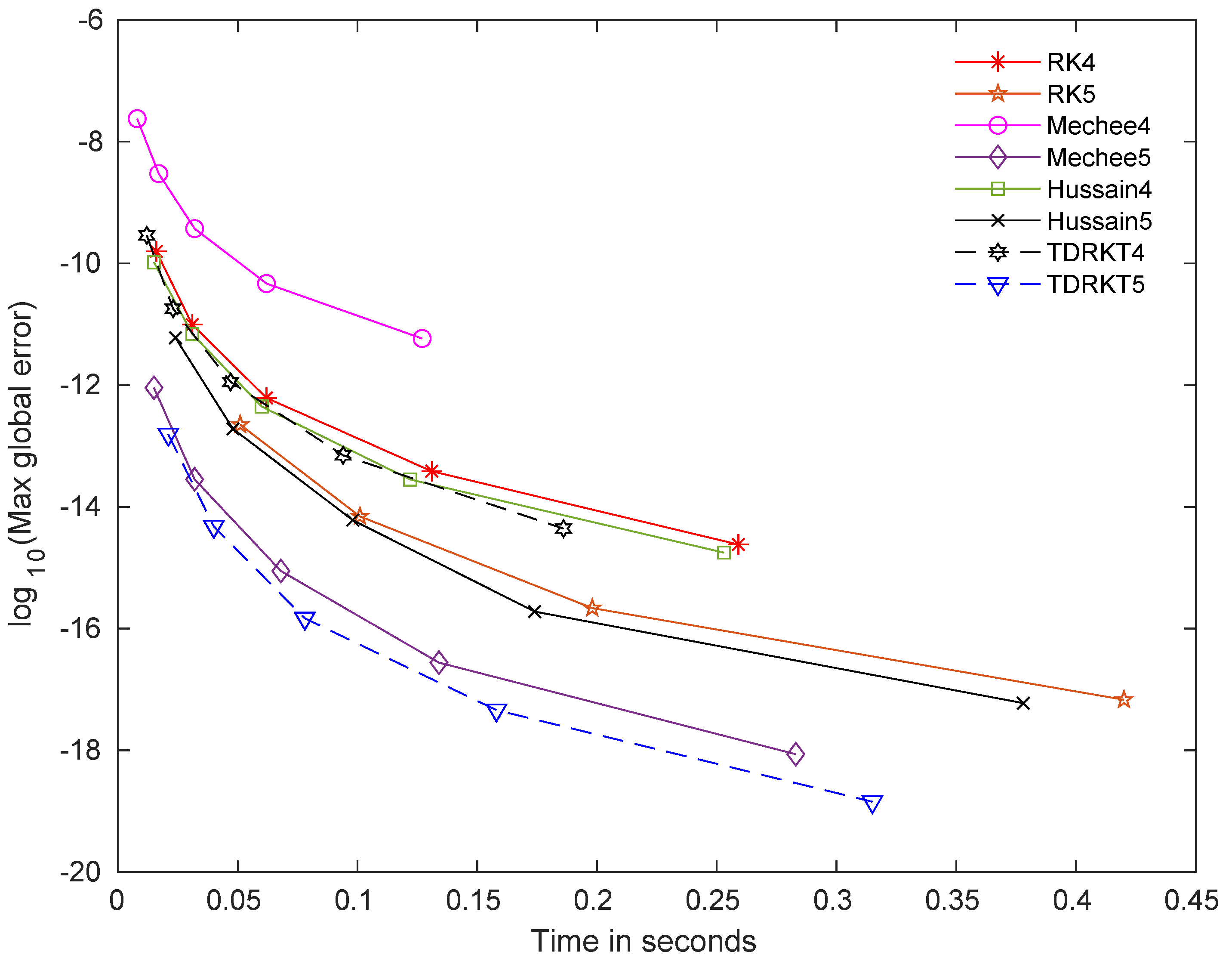
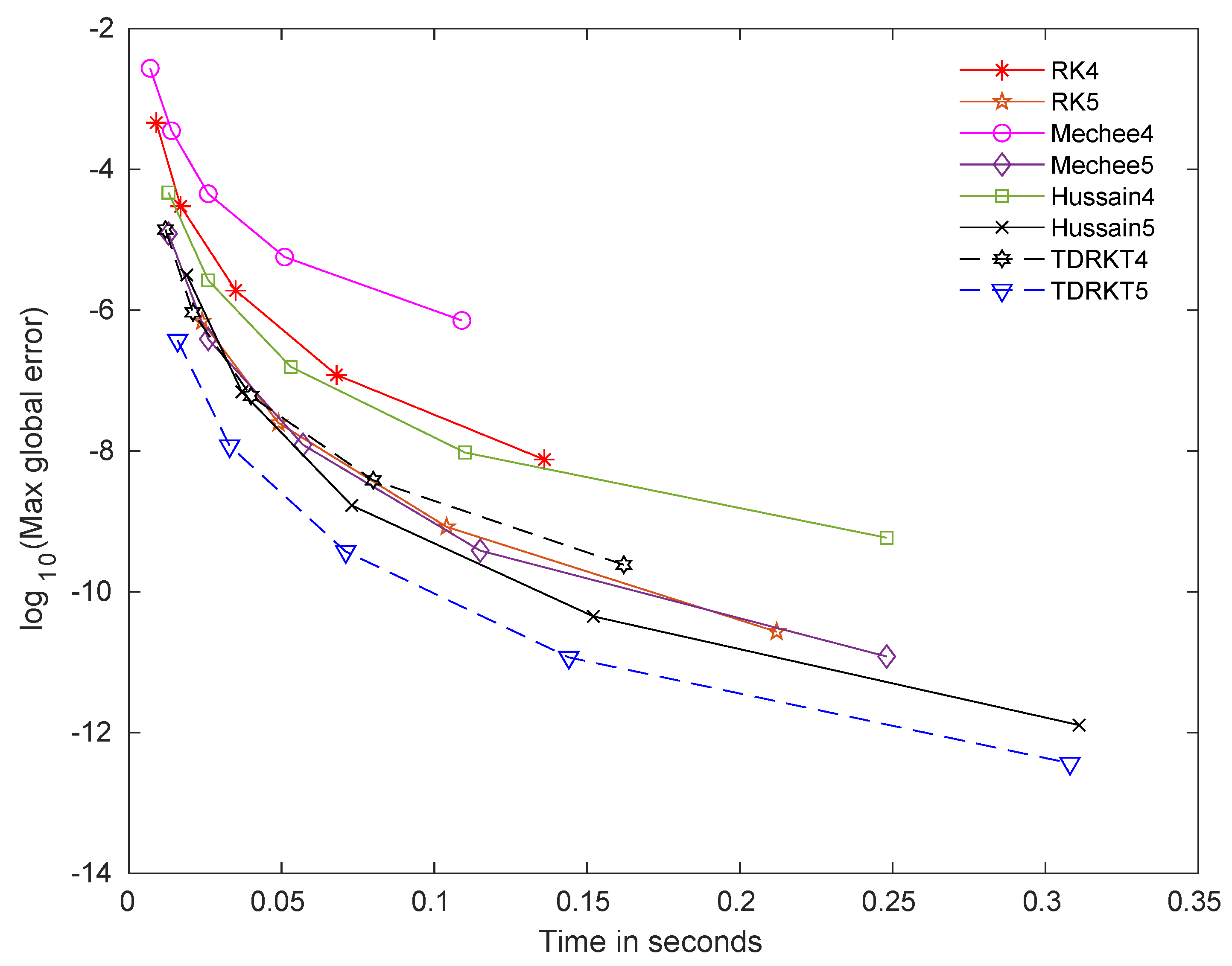
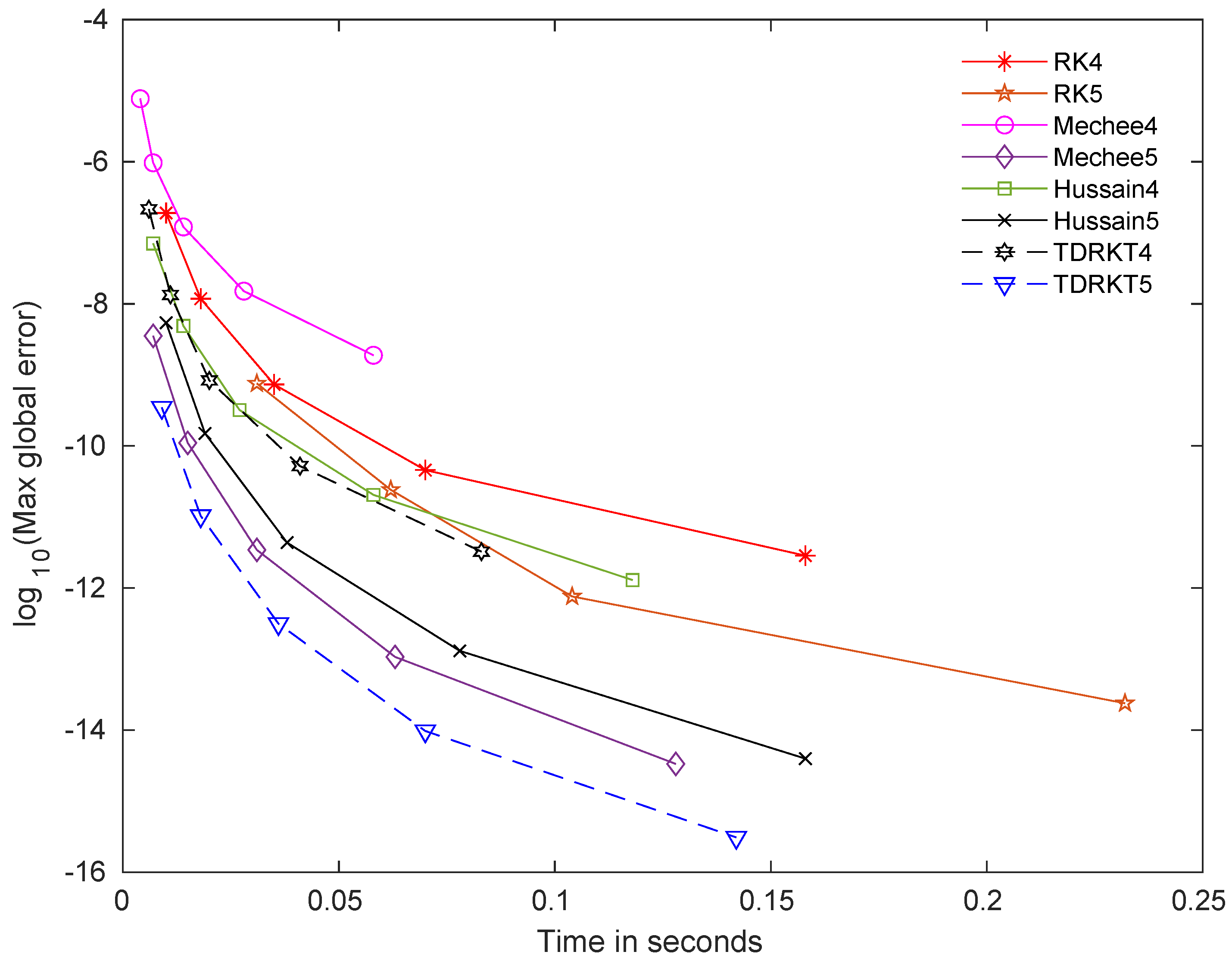
4. Problem Testing and Numerical Result
- TDRKT4—Explicit two-derivative Runge–Kutta type method with two stage fourth-order.
- TDRKT5—Explicit two-derivative Runge–Kutta type method with three stage fifth-order.
- RK4—Runge–Kutta fourth-order method as given in Hossain et al. [13].
- RK5—Runge–Kutta fifth-order method as given in Goeken and Johnson [14].
- Mechee4—Explicit two stage fourth-order direct method proposed by Mechee et al. [15].
- Mechee5—Explicit three stage fifth-order direct method proposed by Mechee et al. [16].
- Hussain4—Fourth-order improved Runge–Kutta direct method proposed by Hussain et al. [17].
- Hussain5—Fifth-order improved Runge–Kutta direct method proposed by Hussain et al. [18].
5. Numerical Results
6. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




References
- Omar, A.A.; Zaer, A.; Ramzi, A.; Shaher, M. A reliable analytical method for solving higher-order initial value problems. Discret. Dyn. Nat. Soc. 2013, 2013, 673829. [Google Scholar]
- Agboola, O.O.; Opanuga, A.A.; Gbadeyan, J.A. Solution of third order ordinary differential equations using differential transform method. Glob. J. Pure Appl. Math. 2015, 11, 2511–2516. [Google Scholar]
- Khataybeh, S.N.; Hashim, I.; Alshbool, M. Solving directly third-order ODEs using operational matrices of Bernstein polynomials method with applications to fluid flow equations. J. King Saud-Univ.-Sci. 2019, 31, 822–826. [Google Scholar] [CrossRef]
- Tang, W.S.; Zhang, J.J. Symmetric integrator based on continuous-stage Runge–Kutta–Nyström methods for reversible systems. Appl. Math. Comput. 2019, 361, 1–12. [Google Scholar] [CrossRef]
- Fang, Y.L.; You, X.; Ming, Q.H. Trigonometrically fitted two-derivative Runge-Kutta methods for solving oscillatory differential equations. Numer. Algorithms 2014, 63, 651–667. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, Z.; Li, J.; You, X. Two-derivative Runge-Kutta-Nyström methods for second-order ordinary differential equations. Numer. Algorithms 2015, 70, 897–927. [Google Scholar] [CrossRef]
- Ehigie, J.O.; Zou, M.M.; Hou, X.L.; You, X. On modified TDRKN methods for second-order systems of differential equations. Int. J. Comput. Math. 2017, 95, 1–15. [Google Scholar] [CrossRef]
- Mohamed, T.S.; Senu, N.; Ibrahim, Z.B.; Nik Long, N.M.A. Efficient two-derivative Runge-Kutta-Nyström for solving general second-order ordinary differential equations. Discret. Dyn. Nat. Soc. 2018, 2018, 2393015. [Google Scholar] [CrossRef]
- Henrici, P. Discrete Variable Methods in Ordinary Differential Equations; John Wiley & Sons: New York, NY, USA, 1962. [Google Scholar]
- Suli, E.; Mayers, D.F. Discrete Variable Methods in Ordinary Differential Equations; Cambridge University Press: Cambridge, UK, 2003; pp. 337–340. [Google Scholar]
- Lambert, J.D. Numerical Methods for Ordinary Differential Systems: The Initial Value Problem; John Wiley & Sons, Inc.: New York, NY, USA, 1991. [Google Scholar]
- Atkinson, K.; Han, W.; Stewart, D. Numerical Solution of Ordinary Differential Equations: Convergence, Stability and Asymptotic Error; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009. [Google Scholar]
- Hossain, B.; Hossain, J.; Miah, M.; Alam, S. A comparative study on fourth order and butcher’s fifth order runge-kutta methods with third order initial value problem (IVP). Appl. Comput. Math. 2017, 6, 243–253. [Google Scholar] [CrossRef]
- Goeken, D.; Johnson, O. Fifth-order Runge-Kutta with higher order derivation approximations. Electron. J. Differ. Equ. 1999, 95, 1–9. [Google Scholar]
- Mechee, M.; Ismail, F.; Siri, Z.; Senu, N. A third-order direct integrators of Runge-Kutta type for special third-order ordinary and delay differential equations. Asian J. Appl. Sci. 2014, 7, 102–116. [Google Scholar] [CrossRef]
- Mechee, M.; Senu, N.; Ismail, F.; Nikouravan, B.; Siri, Z. Three-stage fifth-order Runge-Kutta method for directly solving special third-order differential equation with application to thin film flow problem. Math. Probl. Eng. 2013, 2013, 795397. [Google Scholar] [CrossRef]
- Hussain, K.A.; Ismail, F.; Senu, N.; Rabiei, F. Fourth-order improved Runge–Kutta method for directly solving special third-order ordinary differential equations. Iran. J. Sci. Technol. Trans. Sci. 2017, 41, 429–437. [Google Scholar] [CrossRef]
- Hussain, K.A.; Ismail, F.; Senu, N.; Rabiei, F.; Ibrahim, R. Integration for special third-order ordinary differential equations using improved Runge-Kutta direct method. Malays. J. Sci. 2015, 34, 172–179. [Google Scholar] [CrossRef]
- Yap, L.K.; Ismail, F.; Senu, N. An accurate block hybrid collocation method for third order ordinary differential equations. J. Appl. Math. 2014, 2014, 673829. [Google Scholar] [CrossRef]
- Momoniat, E.; Mahomed, F.M. Symmetry reduction and numerical solution of third-order ode from thin film flow. Math. Comput. Appl. 2015, 15, 709–719. [Google Scholar] [CrossRef]
- Butcher, J.C. Numerical methods for ordinary differential methods in the 20th century. J. Comput. Appl. Math. 2000, 125, 1–29. [Google Scholar] [CrossRef]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations; John Wiley & Sons: Chichester, UK, 2008. [Google Scholar]
- Butcher, J.C. Trees, stumps, and applications. Axioms 2018, 7, 52. [Google Scholar] [CrossRef]






| C | a | ||
| 0 | 0 | 0 | ||||
| 0 | 0 | |||||
| 0 | 0 | 0 | |||||||
| 0 | 0 | ||||||||
| 0 | 0 | 0 | |||||||
| 0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.C.; Senu, N.; Ahmadian, A.; Ibrahim, S.N.I. On Two-Derivative Runge–Kutta Type Methods for Solving u‴ = f(x,u(x)) with Application to Thin Film Flow Problem. Symmetry 2020, 12, 924. https://doi.org/10.3390/sym12060924
Lee KC, Senu N, Ahmadian A, Ibrahim SNI. On Two-Derivative Runge–Kutta Type Methods for Solving u‴ = f(x,u(x)) with Application to Thin Film Flow Problem. Symmetry. 2020; 12(6):924. https://doi.org/10.3390/sym12060924
Chicago/Turabian StyleLee, Khai Chien, Norazak Senu, Ali Ahmadian, and Siti Nur Iqmal Ibrahim. 2020. "On Two-Derivative Runge–Kutta Type Methods for Solving u‴ = f(x,u(x)) with Application to Thin Film Flow Problem" Symmetry 12, no. 6: 924. https://doi.org/10.3390/sym12060924
APA StyleLee, K. C., Senu, N., Ahmadian, A., & Ibrahim, S. N. I. (2020). On Two-Derivative Runge–Kutta Type Methods for Solving u‴ = f(x,u(x)) with Application to Thin Film Flow Problem. Symmetry, 12(6), 924. https://doi.org/10.3390/sym12060924