Abstract
In this manuscript, we consider the finite-time control for nonlinear systems with time-varying delay. With the assistance of a novel Lyapunov-Krasovskii functional which includes some integral terms, a matrix-based on quadratic convex approach, combined with Wirtinger inequalities and some useful integral inequalities, a sufficient condition of finite-time boundedness is established. A novel feature presents in this paper is that the restriction which is necessary for the upper bound derivative is not restricted to less than 1. Further a controller is designed via memoryless state feedback control and a new sufficient conditions for the existence of finite-time state feedback for the system are given in terms of linear matrix inequalities (LMIs). At the end, some numerical examples with simulations are given to illustrate the effectiveness of the obtained result.
1. Introduction
The occurrence of time delays is an important fact in many of the networking and processing control systems. Such delays can have the capacity to destabilize the control systems and also make some crucial disintegration in the performance of the closed-loop systems, see the references cited therein [1,2,3,4,5,6,7]. While modeling a real control system, the existence of time delays is always taken to be a time-varying one that satisfies the condition and which is not necessarily restricted to be 0. In recent years, the study on finite-time stability (FTS) has increased the research interest from various researches around the world due to the wider applications in mathematical control theory, which has been studied by different approaches in various kinds of systems, see for instance [8,9,10,11,12,13,14,15]. To this extent, the author Dorato in [8], explained the fundamental concepts of stability theory of dynamical systems in finite-time sense. Generally, the given system leads to be finite-time stable if the considered state of the system should be within the bounded limit for a fixed interval of time. From this, one can observe that the concept of finite-time stability mainly attracts the boundedness of a system during a fixed interval of time period. Some of the exciting results for finite-time stability and stabilization with the existence of time-delay have been obtained in [8,9,10,11,12]. Moreover, in some practical systems, there is a need to outline the system that guarantees a maximum performance rather than the finite-time stability. Hence this motivates us to concentrate on the present study of research.
On the other hand, the study on control problem will make a sense in reducing the consequences of the external disturbances from both inside and outside the system. The main theme of the problem is to design a controller from outside the system and to obtain the robust stability (i.e., to minimize the errors). Also this will result in minimizing the guaranteeing disturbance attenuation level in the sense for the system. Hence this finite-time control concerns in the design of feedback controller which ensures the FTS of the closed-loop system and guarantees a maximum performance bound.
Recently, the authors [10,11,16,17] have enhanced the results on finite time stability and performance analysis. In [10], finite-time control for a continuous system with norm-bounded disturbance has been studied but a continuous system is not a nonlinear system. Robust finite-time control of linear time-varying delay systems with bounded control has been considered in [11] based on Riccati Equations. In [12], the problem of robust finite-time stabilization with guaranteed cost control was studied based on the Lyapunov functional method and generalized Jensen integral inequality. These techniques allow us to design the state feedback controllers which stabilize the closed-loop system in the finite time. In [18], authors used an improved Lyapunov-Krasovskii functional (LKF) with triple-integral terms, augment terms and convex combination technique to show the effectiveness of the obtained results. Hao et al. [19] developed a novel problem on time-varying delayed nonlinear systems with finite-time stability and stabilization by employing the integral inequality and some free fuzzy by weighting metrices, which are less conservative than other existing ones. In [20], delay-dependent finite-time stability criteria for an uncertain continuous-time system with time varying delays has been studied but a continuous-time system is not a nonlinear system and without performance analysis. In [21], improved results on delay-dependent control for uncertain systems with time-varying delays have been considered by using bounding techniques for some cross-term of the LKF method and the free-weighting matrix method.
Several approaches that reduce the conservatism for the system with time delay have been reported in the literature. They are namely an appropriate Lyapunov-Krasovskii functional method by using bounding techniques while finding the time-derivative, delay decomposition approach; free weighting matrices approach and reciprocally convex optimization techniques, see [21,22,23,24]. Of all the above mentioned approaches, a novel method to reduce the conservatism is matrix-based quadratic convex approach. This approach will gives a better maximum allowable upper bound for time-varying delay over some existing ones, see for references [25,26,27].
So with the intuition from the above evidences, in this paper, we have followed a matrix-based quadratic convex approach to obtain a better maximum bound value. This is the first time that we have incorporated this method to study the finite-time problem for the considered control system with time-varying delay. Further, the purposes of this paper are given as follows:
- I.
- We consider some new Lyapunov-Krasovskii functional which has not been considered yet in stability analysis of finite-time control. The new Lyapunov-Krasovskii functional includes some integral terms of the form which the integrands are polynomial multiplied by and one may estimate an upper bound of the integral by employing some techniques from [22,25], the matrix based quadratic convex approach, the use of a tighter bounding technique and useful integral inequality such as Wirtinger inequality.
- II.
- Lyapunov-Krasovskii with the matrix based quadratic convex approach is introduced to formulate finite-time stability criteria and performance level where the time-varying delay satisfies Moreover, the restriction of upper bound derivative is not necessary restricted less than 1 compared with [20]
- III.
- Two numerical examples are given to demonstrate the effectiveness of theoretical result.
2. Problem Statement
In this section, we consider a system with time-varying delay and control input as
where is the state; is the control input, is a disturbance input and is the observation output. The delay is time-varying continuous function which satisfies
In this paper, we consider the nonlinear functions satisfying
are nonlinear function satisfying the Lipschitz conditions; namely, there exist positive constants such that
We assume the following restrictions on the nonlinear perturbations
The initial condition, The disturbance is a continuous function satisfying
Under the above assumptions on and the initial function , the system (2) has a unique solution on For a prescribed scalar , we define the performance index as
The objective of this paper is to design a memoryless state feedback controller .
3. Preliminaries
The following definition and lemma are necessary in the proof of the main results:
Definition 1.
Definition 2.
[9] The nonlinear system (2) is said to be finite-time bounded with respect to with and a memoryless state feedback controller , following conditions should be satisfied:
- (i)
- The zero solution of the closed-loop system, where ,is finite-time bounded.
- (ii)
- Under zero-initial condition the output satisfies
We introduce the following technical lemmas, which will be used in the proof of our results.
Proposition 1.
[11] Let be symmetric positive definite matrices. We have
- (i)
- (ii)
- (iii)
- .
Lemma 1.
[22] For a given matrix , the following inequality holds for any continuously differentiable function
where .
Remark 1.
: From the above inequality, it can be observed that the inequality in Lemma 1 gives a firm lower bound for than Jensen’s inequality since for Hence it shows that the inequality (9) is improved than the Jensen’s inequality.
Before we introduce some useful integral inequalities, we denote
Lemma 2.
[25] For a given scalar and any real matrices and and a vector such that the integration concerned below is well defined, the following inequality holds for any vector-valued function and matrices and satisfying
where is defined in (10).
Lemma 3.
[26] Let be a continuous function satisfying . For any real matrix and a vector such that the integration concerned below is well defined, the following inequality holds for any and real matrices satisfying
where with being defined in (10).
Lemma 4.
[25] Let be a continuous function satisfying For any real matrix and a vector such that the integration concerned below is well defined, the following inequality holds for any real matrix satisfying
where and
Remark 2.
If we substitute , in Lemma 4, then the inequality can be reduced and it is similar to that of the one in [22]. Also, the dimensions of the slack matrix variables of is compared to the dimension introduced in [23].
Lemma 5.
[25] Let and be real symmetric matrices and a continuous function d satisfy where and are constants satisfying . If then
4. Main Results
In this section, we firstly design a memoryless feedback control for the addressed system (2) with the inclusion of time-varying delays and then obtain the finite-time stabilizability analysis conditions. Here we derive a novel finite-time stability for the system (2) by using the matrix-based quadratic convex approach with some integral inequalities in [25]. To achieve this status, we choose the following Lyapunov-Krasovskii functional:
where denotes the function defined on the interval . Setting , and
where and P are real matrices to be determined. Before introducing the main result, the following notations of several matrix variables are defined for simplicity:
with denoting the i-th row-block vector of the identity matrix and
Theorem 1.
Consider Then system (2) is finite-time control with respect to and satisfies for all nonzero if there exist positive definite matrices and Y such that the following linear matrix inequalities hold
and
For this problem, the feedback control is taken to be of
Proof.
With the consideration of the three terms of , we obtained the following inequalities:
and
Therefore, the estimation of is estimated as
where is given as the same as that of in (11). Further, is estimated as
where
By Lemma 3 and Lemma 4, we obtain the following
where and
and
Thus, we get
where is given in (12). From Lemma 1 and Lemma 2, we obtain
and
From which it follows that
where ,
Hence, from (23) and (24), we obtain
where From (21), (22) and (25), we obtain along the solution of the system (2) as
where
Therefore, we have
where
and is defined in ([23]). may be rewritten as
where and are -independent real matrices. By Lemma (5), if and the inequality in (14) holds, then Moreover, the terms can be recast in the sense of convex combination of as follows:
where and are -independent real matrices. Hence by making use of the Schur complement lemma, it follows from (27), (28) and (6) that the inequality holds. Therefore, we have from inequality (26) that
and hence
because of . Multiplying both sides with we obtain
Hence, we have
So,
Integrating both sides from 0 to t, we get
which can be reformulated as
note that
Hence, we have
and .
Consider
so we have
where .
Therefore, from (31), (33), it follows that
and hence from (30), we have
which implies that the closed-loop system is finite-time stable w.r.t To complete the proof of the theorem, it remains to show the optimal level condition (5). For this, we consider the following relation
Integrating both sides of above equation from to t, we get
It follows that
Therefore, under zero initial condition , , by letting in (34), we get
which gives . This completes the proof. □
5. Numerical Examples
In this section, we provide two numerical examples with their simulations to demonstrate the effectiveness of our results.
Example 1.

Consider the nonlinear system with interval time-varying delays which was considered in [7]
We have used theorem 1 to evaluated the value of minimum γ for control condition. Where
, . And the condition (15) is satisfied with By using LMI Toolbox in Matlab, it can be shown that the constructed LMI in Theorem (1) is feasible. Further the controller feedback gain matrix is obtained as:
Table 1, shows the value of minimum γ with and by using Theorem (1). In Table 2, we show the value of minimum γ with and by using Theorem (1)
Table 1.
The value of the minimum allowable disturbance attenuation γ with and .
Table 2.
The value of the minimum allowable disturbance attenuation γ with and .
Example 2.
[20] Consider the following nonlinear system with interval time-varying delay which was considered in
with
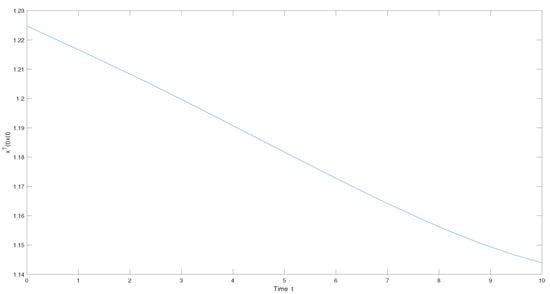
we investigate delay function . Consider the finite-time of nonlinear system with respect to with different fixed times . The maximum values of the norm of state vector are and for , respectively. We have Figure 1 to show the trajectories of of the closed-loop system with the condition Moreover, we set and the initial function . From (31) and (33), we obtain and By solving Theorem using MATLAB toolbox a feasible solution (show some solution) is
the controller feedback gain can be computed as
Figure 1.
Trajectories of in Example 2, the unit of T which is second.
Table 3 to shows the smallest value of with different
Table 3.
Shows the smallest value of with different
Remark 3.
From Table 3, the table lists the smallest values of with different . It is obvious that condition in [20] is not-feasible (NF) because for all T. It not consistent with the conditions in [20].
6. Conclusions
In this paper, finite-time control for nonlinear systems with time-varying delay is studied. By using a set of improved Lyapunov-Krasovskii functional including with some integral terms, a matrix-based on quadratic convex, combined with Wirtinger inequalities and some useful integral inequalities were proposed which illustrate the effectiveness of the obtained result in the numerical part. However, the improved method for the restriction on the upper bound of the delay derivative should be considered which means that a fast time-varying delay is allowed without any requirement on the derivative. New sufficient conditions of finite-time boundedness for above-mentioned class of system were given in term of linear matrix inequalities (LMIs).
Author Contributions
Methodology, C.E. and P.N.; conceptualization, C.E. and W.W.; implementation of numerical schemes and writing of the manuscript was completed by C.E.; reviewed, edited and modified by R.R. All authors have read and agree to the published version of the manuscript.
Funding
This article has been written with the joint financial support of Thailand Research Fund (TRF), the Office of the Higher Education Commission (OHEC) (grant number: MRG6180034), RUSA-Phase 2.0 Grant No.F 24-51/2014-U, Policy (TN Multi-Gen), Dept. of Edn. Govt. of India, UGC-SAP (DRS-I) Grant No.F.510/8/DRS-I/2016(SAP-I) and DST (FIST - level I) 657876570 Grant No.SR/FIST/MS-I/2018/17.
Acknowledgments
The authors are thankful to the anonymous referees for their invaluable suggestions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Park, P.; Lee, W.I.; Lee, S.Y. Auxiliary function-based integral inequalities for quadratic functions and there applications to time delay systems. J. Frankl. Inst. 2015, 352, 1378–1396. [Google Scholar] [CrossRef]
- Bao, H.; Cao, J. Stochastic global exponential stability for neutral-type impulsive neural networks with mixed time-delays and Markovian jumping parameters. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 3786–3791. [Google Scholar] [CrossRef]
- Emharuethai, C.; Niamsup, P. H∞ control problem for linear time-varying systems with time-varying delay. Adv. Differ. Equations Control. Process. 2009, 4, 7–27. [Google Scholar]
- Emharuethai, C.; Niamsup, P. Robust H∞ control of linear systems with interval non-differentiable time-varying delay. In Proceedings of the 2012 10th World Congress on Intelligent Control and Automation (WCICA), Beijing, China, 6–8 July 2012; pp. 1507–1512. [Google Scholar]
- Tuan, L.A.; Nam, P.T.; Phat, V.N. New H∞ controller Design for neural networks with interval time-varying delays in State and Observation. Neural Process Lett. 2013, 37, 235–249. [Google Scholar] [CrossRef]
- Huang, H.; Huang, T.; Chen, X. Further Result on Guaranteed H∞ performance state estimation of delayed static neural networks. IEEE Trans. Neu. Net. Lear. Syst. 2015, 26, 1335–1341. [Google Scholar]
- Thanh, N.T.; Phat, V.N. H∞ control for nonlinear systems with interval non-differentiable time-varying delays. Eur. J. Control. 2013, 19, 190–198. [Google Scholar] [CrossRef]
- Dorato, P. Short time stability in linear time-varying systems. Proc. IRT Int. Conv. Rec. 1961, 4, 83–87. [Google Scholar]
- Amato, F.; Ariola, M.; Dorato, P. Finite-time control of linear systems subject to parametric uncertainties and disturbances. Automatica 2001, 37, 1459–1463. [Google Scholar] [CrossRef]
- Meng, Q.; Shen, Y. Finite-time H∞ control for continuous system with norm-bounded disturbance. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 1043–1049. [Google Scholar] [CrossRef]
- Niamsup, P.; Phat, V.N. Robust Finite-time H∞ control of linear time-varying delay systems with bounded control via Riccati Equations. Int. J. Autom. Comput. 2018, 15, 355–363. [Google Scholar] [CrossRef]
- Niamsup, P.; Ratchagit, K.; Phat, V.N. Novel criteria for finite-time stbilization ans guaranteed cost control of delay systems delayed neural networks. Neurocomputing 2015, 160, 281–286. [Google Scholar] [CrossRef]
- Raul, C.R.; Radu, E.P.; Radu, C.D. Second order intelligent proportional-integral fuzzy control of twin rotor aerodynamic systems. Procedia Comput. Sci. 2018, 139, 372–380. [Google Scholar]
- Zhang, H.; Liu, X.; Ji, H.; Hou, Z.; Fan, L. Multi-Agent-Based Data-Driven Distributed Adaptive Cooperative Control in Urban Traffic Signal Timing. Energies 2019, 12, 1402. [Google Scholar] [CrossRef]
- Li, K.; Boonto, S.; Nuchkrua, T. On-line Self Tuning of Contouring Control for High Accuracy Robot Manipulators under Various Operations. Int. J. Control Autom. Syst. 2020. [Google Scholar] [CrossRef]
- Ma, P.; Liu, X.; Qin, L.; Wu, G. Finite-time event-triggered H∞ control for switched systems with time-varying delay. Neurocomputing 2016, 207, 828–842. [Google Scholar] [CrossRef]
- Xiang, Z.R.; Sun, Y.N.; Mahmoud, M.S. Robust finite-time H∞ control for a class of uncertain switched neutral systems. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 1766–1778. [Google Scholar] [CrossRef]
- Jun Jun, H.; He, X.Z.; Xiang, Y.K. Delay-dependent non-fragile H∞ control for linear systems with interval time-varying dela. Int. J. Autom. Comput. 2015, 12, 109–116. [Google Scholar]
- Hao, L.; Peng, S.; Hamid, R.K.; Mohammed, C. Finite-time and stabilisation for a class of nonlinear systems with time-varying delay. Int. J. Syst. Sci. 2016, 6, 1433–1444. [Google Scholar]
- Stojanovic, S.B. Further improvement in delay-dependent finite-time stability criteria for uncertain continuous-time system with time varying delays. IET Control. Theory Appl. 2016, 10, 926–938. [Google Scholar] [CrossRef]
- Raja, R.; Zhu, Q.; Samidurai, R.; Senthilraj, S.; Hu, W. Improved results on delay-dependent H∞ control for uncertain systems with time-varying delays. Circuits Syst. Signal Process. 2017, 36, 1836–1859. [Google Scholar] [CrossRef]
- Seuret, A.; Gouaisbaut, F. Wirtinger-based integral inequality: Application to time-delay systems. Automatica 2013, 49, 2860–2866. [Google Scholar] [CrossRef]
- Kim, J.H. Note on stability of linear systems with time-varying delays. Automatica 2011, 47, 2118–2121. [Google Scholar] [CrossRef]
- Park, P.G.; Ko, J.W.; Jeong, C. Reciprocally convex approach to stability of systems with time-varying delays. Automatica 2011, 47, 235–238. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L. A new stability criterion using a matrix-based quadratic convex approach. IET Control. Theory Appl. 2014, 8, 1054–1061. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L. Global asymptotic stability analysis for delayed neural networks using a matrix-based quadratic convex approach. Neural Netw. 2014, 54, 57–69. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L. Noval delays-derivative-dependent stability criteria using new bounding techniques. Int. J. Robust Nonlinear Control. 2013, 23, 1419–1432. [Google Scholar] [CrossRef]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).