3.1. Linear Representations of Groupoids
We will denote by the category of linear spaces whose objects are complex linear spaces V and whose morphisms are linear maps . The subcategory of finite-dimensional linear spaces will be denoted as .
Definition 2. A linear representation of a groupoid is a functor R from the category to the category of linear spaces. A finite-dimensional representation of a groupoid is a functor R from the category to the category of finite dimensional linear spaces. A linear representation will be denoted as .
More specifically, if R is a finite-dimensional representation of the groupoid , the functor R assigns a finite dimensional linear space to any object and a linear map , to any morphism in the groupoid, in such a way that for every composable pair , and is the identity map on each linear space .
Because of the decomposition (
5), we can restrict ourselves to consider connected groupoids. Notice that if the groupoid is connected then all spaces
corresponding to the linear representation
R are isomorphic, hence the linear spaces defined by any representation of a finite groupoid are isomorphic on each orbit of the groupoid and they possess the same dimension
n if the representation is finite dimensional. We will call this number the dimension of the representation
R of the finite connected groupoid. Notice that the dimension could vary from connected component to connected component.
Given a representation R of a finite groupoid , we will call the linear space the total space of the representation. Notice that if is connected and R is finite dimensional, , with n the dimension of the representation.
In particular, if the groupoid is a group, i.e., it possesses just one object (that may be identified with the neutral element of the group), a linear representation R of the groupoid becomes a standard linear representation of the group, that is , V is a linear space (the one associated with the neutral element), is a linear map such that for any element g in the group, and for any elements in the group .
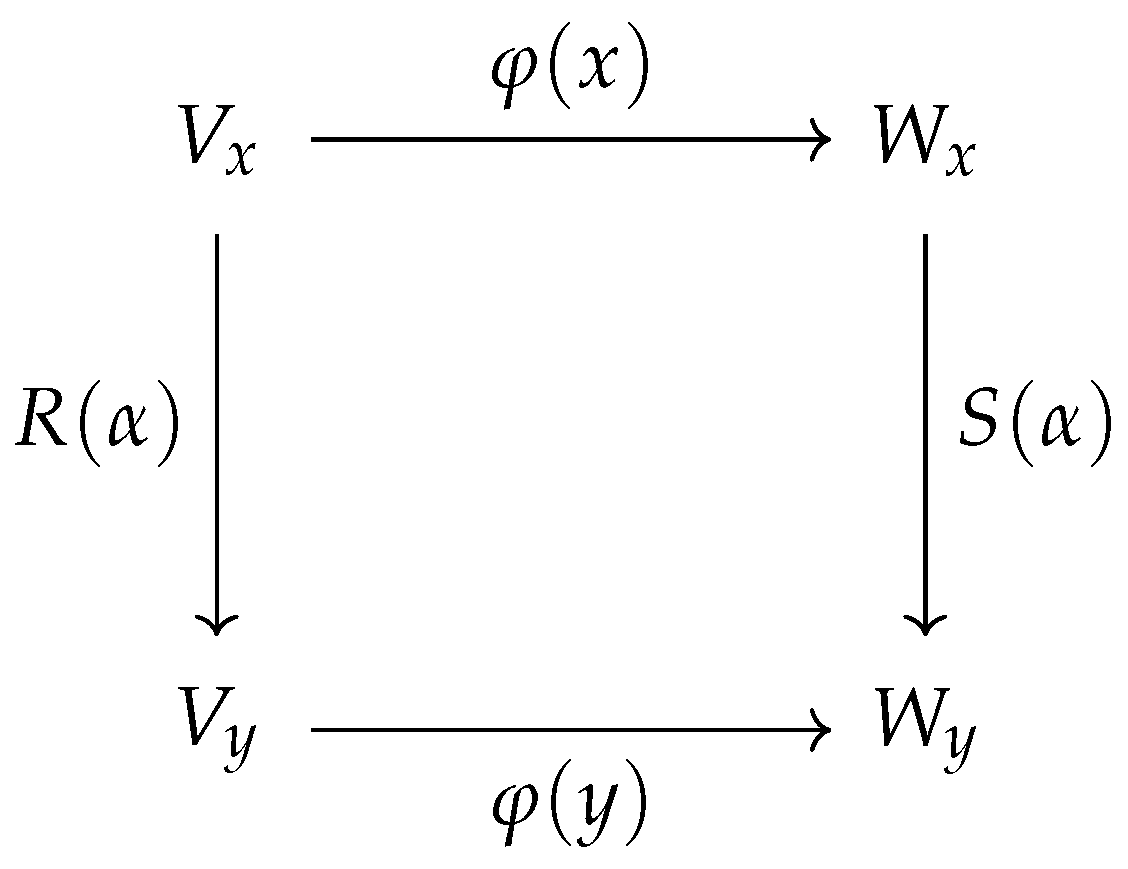
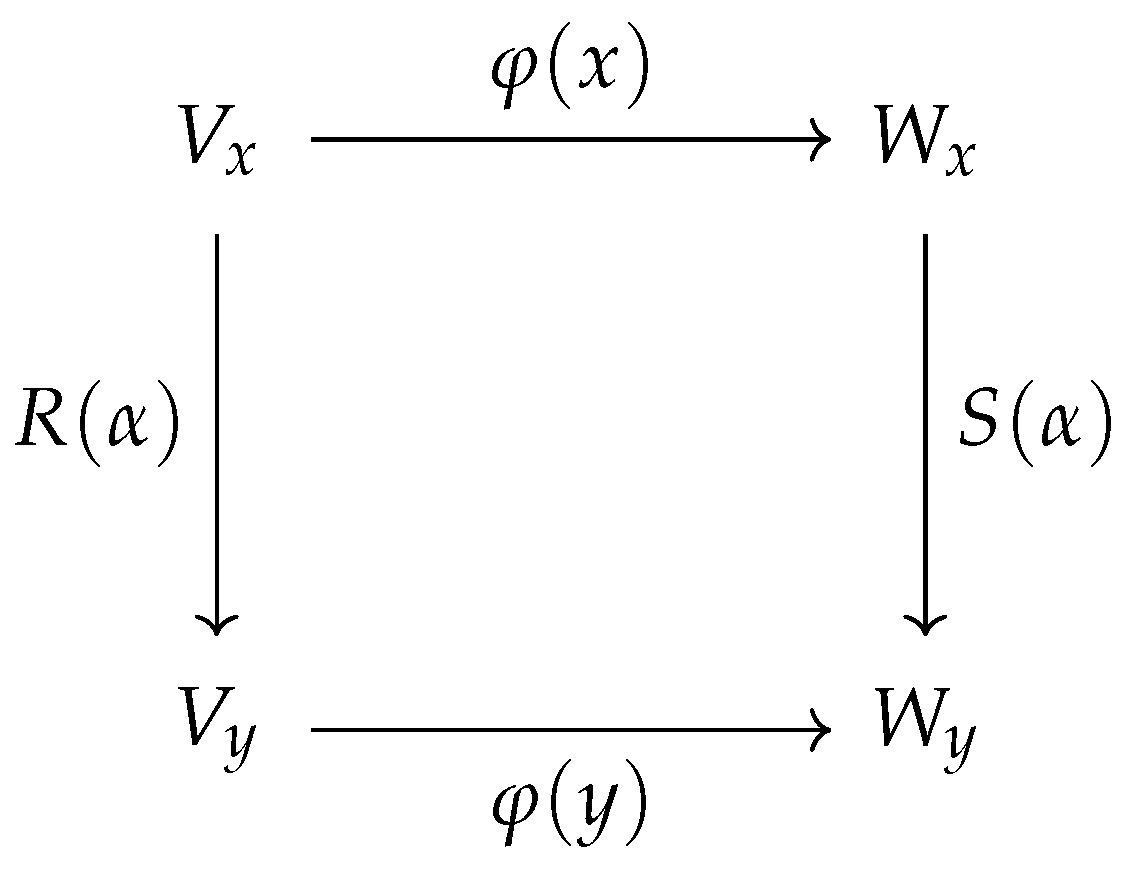
There is a ‘natural’ notion of equivalence between linear representations of a groupoid and it is given by the notion of natural transformations among functors. More specifically, a natural transformation
between the functors
R and
S defining two linear representations of
, assigns to any object
x of the groupoid
a linear map
such that the diagram below (
Figure 2) is commutative, that is,
for any
.
If we are given two natural transformations and the composition of them, , is defined in the obvious way: for all objects x.
The natural transformation is said to be invertible if there exists another natural transformation , such that , with the trivial natural transformation given by . Then we can state the notion of equivalence of two linear representations R and S as follows:
Definition 3. Given two linear representations we will say that R and S are equivalent if there exists an invertible natural transformation between the functors R and S.
Again, the restriction of the notion of equivalence of linear representations to the class of groups provides the standard notion of equivalence of linear representations of groups.
The family of linear representations of groupoids is a category itself whose objects are the representations R and its morphisms are natural transformations . We may consider the category whose objects are equivalence classes of representations and the corresponding induced natural transformations as morphisms. This category is the structure we would like to study for a given groupoid as it provides all possible linear ‘snapshots’ of the given abstract groupoid. We will find out that, similar to the theory of linear representations of finite groups, this category can be described completely and it is constructed from a finite number of ‘elementary’ blocks, the irreducible representations of the groupoid.
A subrepresentation of a linear representation R of the groupoid is a functor such that for each object x, , and the restriction of the linear map to the subspace coincides with , in such case we will write . Notice that if is a subrepresentation of R, then the subspaces are invariant under in the sense that for any vector and . Notice that if is a subrepresentation of R, then we may define a representation of on the quotient spaces , by means of , . We will call this representation the quotient representation of R by and we denote it by .
Any representation R has two trivial subrepresentations: R itself and the zero representation, that is, the functor that assigns the zero vector space to any object. Any subrepresentation of a linear representation R of the groupoid different from the two trivial subrepresentations R and will be called a proper subrepresentation. We will be interested in representations that do not possess proper subrepresentations.
Definition 4. A representation R of a groupoid will be said to be irreducible if it has no proper subrepresentations.
Notice that any irreducible representation of a finite groupoid is finite-dimensional. In fact, if is irreducible, we can choose a non-zero vector in each space for each and define the space which clearly constitutes a finite-dimensional subrepresentation of R. Moreover, a simple induction argument shows that any finite-dimensional representation contains an irreducible representation.
Given two linear representations
R,
S of the groupoid
, we may define its direct sum
and tensor product
in a similar way as in the case of groups. These operations induce natural operations on the category
. We will not use this structure in what follows as we are not intending to address the extension of the Tannaka-Krein duality (see for instance [
21] and references therein) to the category of groupoids, a problem that will be dealt with elsewhere.
More specifically, we define the direct sum of two representations R, S as the linear representation of the groupoid determined by the functor that assigns the linear space ( and ) to any object x, and a linear map to any . Similarly, we define as the linear representation of the groupoid determined by the functor that assigns the linear space to any object x and the linear map , to any .
Definition 5. A linear representation R of the groupoid will be said to be decomposable if given a subrepresentation of R there exists another subrepresentation of R such that . We will say that the representation R is indecomposable if it is not decomposable.
Notice that any irreducible representation is indecomposable, however, the converse is not necessarily true.
Definition 6. A linear representation of a groupoid will be said to be completely reducible if it is equivalent to a direct sum of irreducible representations. In particular, a finite dimensional linear representation will be completely reducible if it is equivalent to a finite direct sum of irreducible representations of .
The following theorem shows that any finite-dimensional representation is completely reducible.
Theorem 1. Any finite-dimensional linear representation R of a finite groupoid is completely reducible and is equivalent to the direct sum of irreducible representations whose factors and multiplicities are uniquely determined. Moreover, any indecomposable finite-dimensional linear representation of a finite groupoid is irreducible.
Hence, if is a finite groupoid, as a consequence of the previous theorem we can concentrate on the study of its finite-dimensional linear representations and its decomposition in irreducible ones.
The theorem is a consequence of the following Lemmas, the groupoid analogue of the Jordan-Hölder theorem in the case of groups, whose proofs follows a similar pattern (see for instance [
22,
23]), the theorem proving that the algebra of a finite groupoid is semisimple, Theorem 3, and the characterization of semisimplicity, Theorem 2 below.
Given a linear representation , a finite filtration of R is a sequence of subrepresentations , , such that .
Lemma 1. Any finite dimensional representation R of a finite groupoid admits a finite filtration such that the successive quotients are irreducible.
Proof. We will assume that the groupoid is connected and the proof is by induction in n, the dimension of the representation. The statement is obviously true for .
Let R be a finite dimensional representation. If R is not irreducible, let be an irreducible subrepresentation. Then consider the representation and apply the induction hypothesis. □
Proposition 3. Let R be a finite-dimensional representation of the finite groupoid . Let and be filtrations of R such that the representations and are irreducible for all i and k (in particular and are irreducible). Then and there exists a permutation σ such that is equivalent to .
Proof. Again, assuming that is connected, the proof is by induction on the dimension of the representation n. The case is trivial.
Suppose that and is not equivalent to (if and were equivalent, we apply the induction hypothesis). In such case the intersection of the subspaces corresponding to and is zero, that is (if not, the intersection will define a proper subrepresentation of both and in contradiction with the assumption that they are irreducible). Then we can consider the subrepresentation and the quotient . Consider a filtration such that the quotients are irreducible (that exists because of Lemma 1). Then has a filtration with successive quotients and another with successive quotients and has two filtrations with successive quotients and . Then by the induction hypothesis, the collection of irreducible representations on both filtrations coincide. □
3.2. The Groupoid Algebra and Linear Representations of Groupoids
Given a finite groupoid
, we will denote by
the finite dimensional *-algebra generated by the elements
in the groupoid and relations provided by the groupoid composition law, that is, elements
of the algebra
are formal linear combinations of elements in
with complex coefficients:
,
. The composition law is given by:
with
,
(notice that the composition of morphisms on the r.h.s. of Equation (
8) is only among composable pairs
,
).
The algebra
is a unital associative algebra. The unit element is given by
. There is, in addition, a natural antilinear involution map * defined as:
The unital associative algebra
equipped with the involution * becomes a *-algebra. Even more, there is a canonical norm
in
that makes it into a
-algebra (even if we will not use this structure in the current work).
The natural correspondence between linear representations of the groupoid
and
-modules allows us to use the structure of the algebra
to study the linear representations of
. More specifically, given a linear representation
R of the finite groupoid
, there is a
-module
V associated with it. The linear space
V is the total space of the representation
R given by
and the action of the algebra
on
V is given by:
where
and
, in particular
.
Conversely, if V is a finite-dimensional -module, consider any element as a linear map on V. The units of the groupoid define a family of projectors on V, . Notice that and . If we denote by the range of the projector , then and the family of maps , , defined as , defines a linear representation of the groupoid .
Hence, any linear representation defines a -module V and a linear map , . In what follows we will use these notions interchangeably.
The previous identification of linear representations of the groupoid and -modules extends to the rest of the definitions, in particular we recall that a linear representation R is irreducible iff the corresponding -module V is simple (i.e., it has no proper submodules).
3.3. The Fundamental Representation of a Finite Groupoid
In this section we will discuss the fundamental representation of a finite groupoid leaving to
Section 4.3 the discussion on its left and right regular representations.
The fundamental representation of the finite groupoid , is supported on the linear space freely generated by the elements of , that is, vectors in are formal linear combinations , .
The linear space has dimension and carries a canonical basis given by the elements x of themselves. The existence of the canonical basis allows us to introduce a natural inner product such that the vectors x form an orthonormal basis, that is .
The representation
is defined as follows: let
a groupoid morphism, then define the linear map
i.e., the linear map
transforms the element
x of the canonical basis to
y and all others to zero.
It is simple to check that the fundamental representation is unitary, that is for any unitary element in (), is a unitary operator: , where denotes the Hermitean conjugate (or adjoint) with respect to the inner product . The previous assertion follows easily from the fact that .
Proposition 4. Let be a finite connected groupoid, then the fundamental representation is irreducible.
Proof. Suppose that is a -submodule, then , with the corresponding projector on , defines a subrepresentation of . However, either is the zero space or (because ). If , then given , because there is , and . Then . □







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}