A Robust Localization, Slip Estimation, and Compensation System for WMR in the Indoor Environments


Abstract
:1. Introduction
2. Basic Theory and Background Knowledge
2.1. Bayes Filter
2.1.1. Prediction
2.1.2. Process Updating
2.2. Sequential Monte Carlo Estimation (Particle Filters)
2.3. Sequential Importance Sampling (SIS)
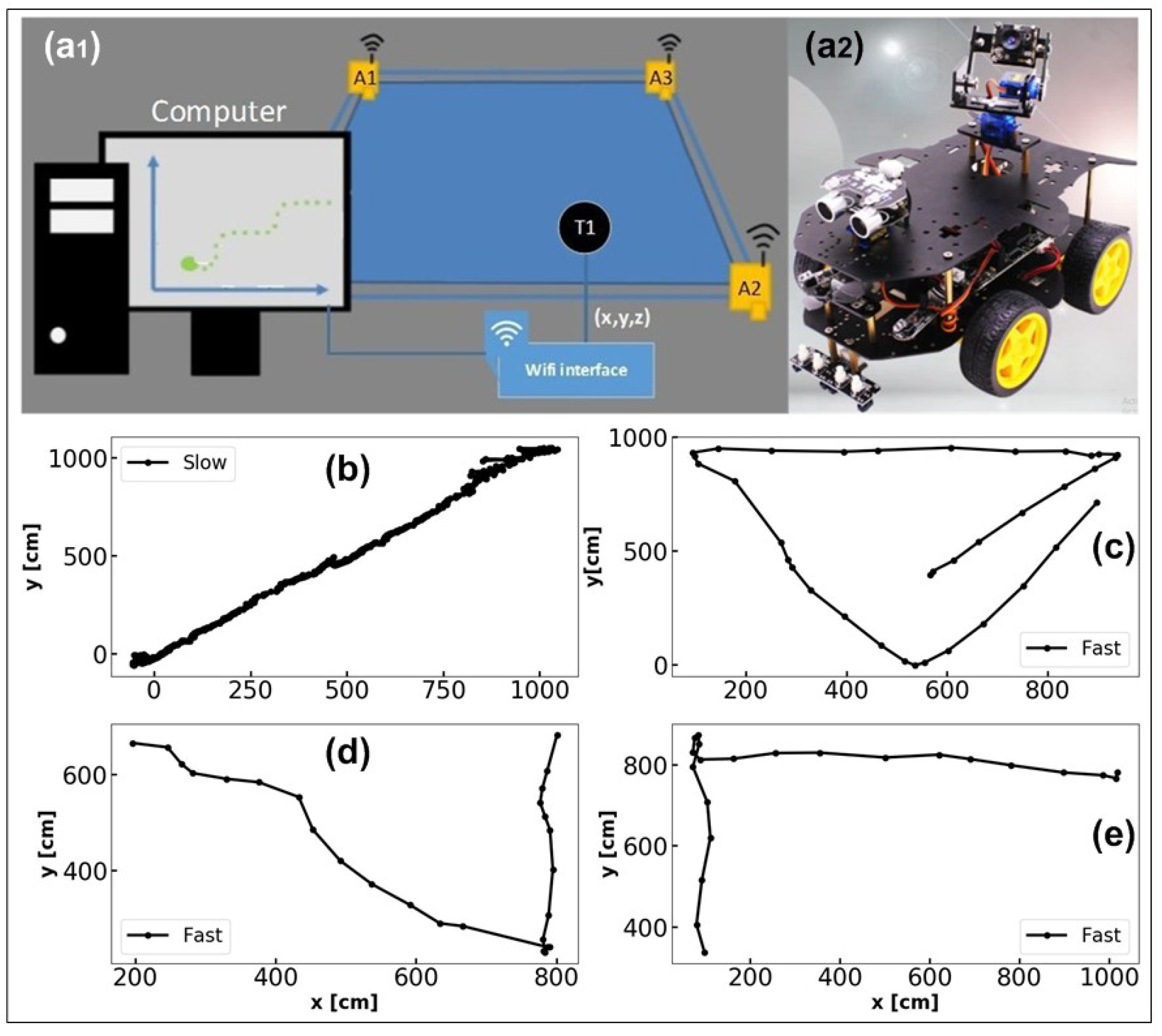
3. DecaWave-Based RTLS
3.1. Wheeled Mobile Robot
3.1.1. Differential Steering
3.1.2. Ackermann Steering
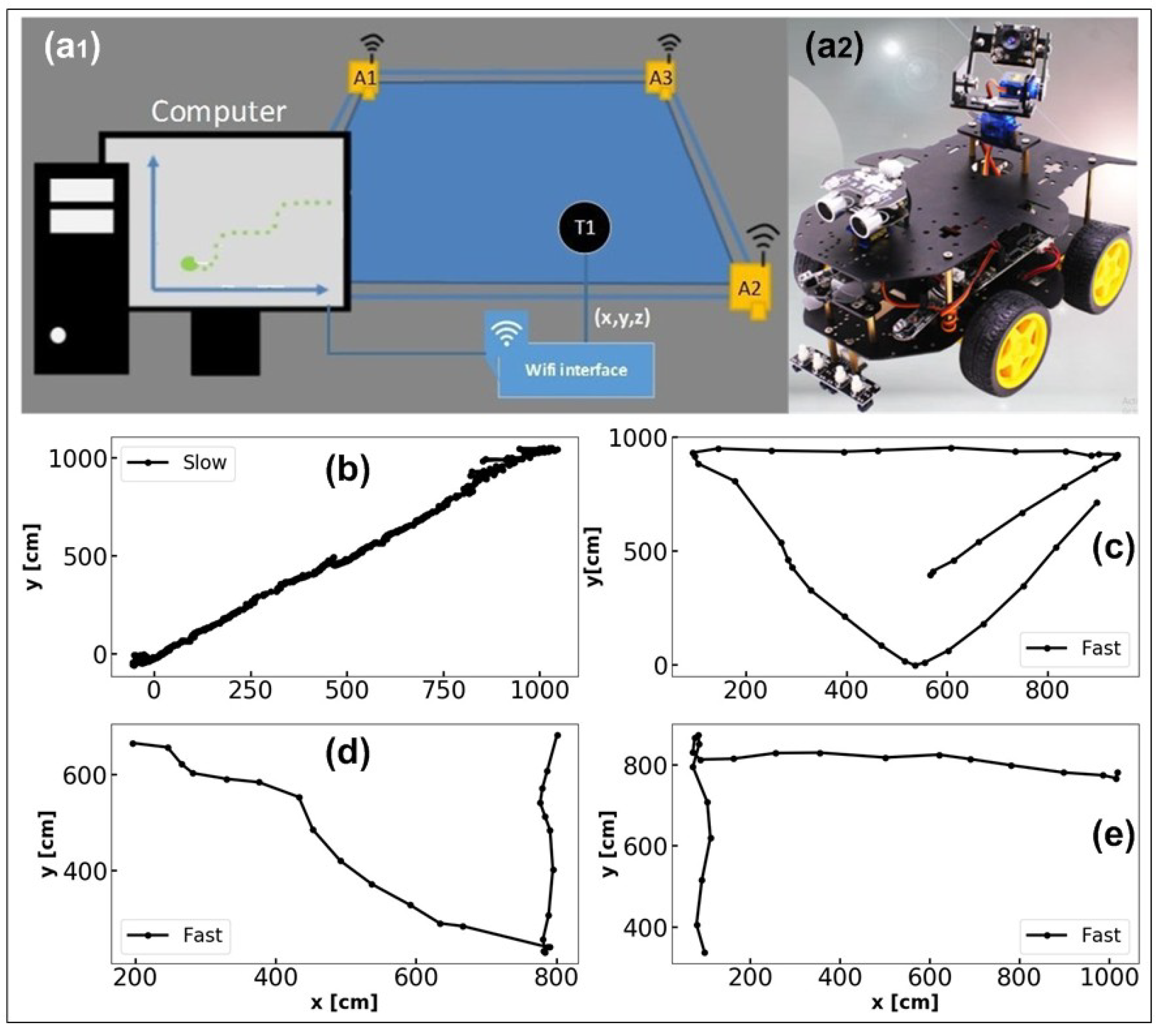
3.2. Simulation Environment
4. Results and Discussion
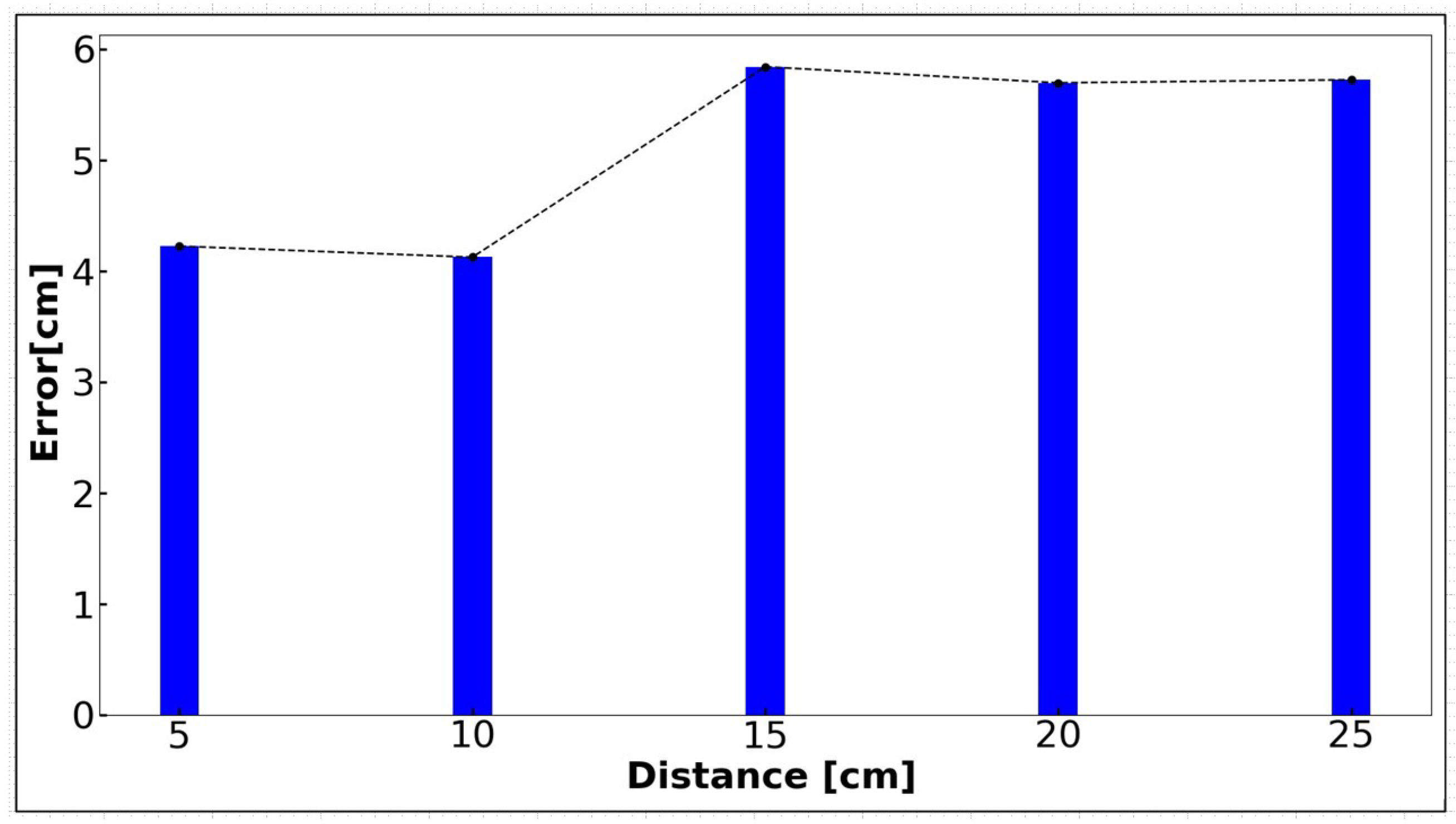
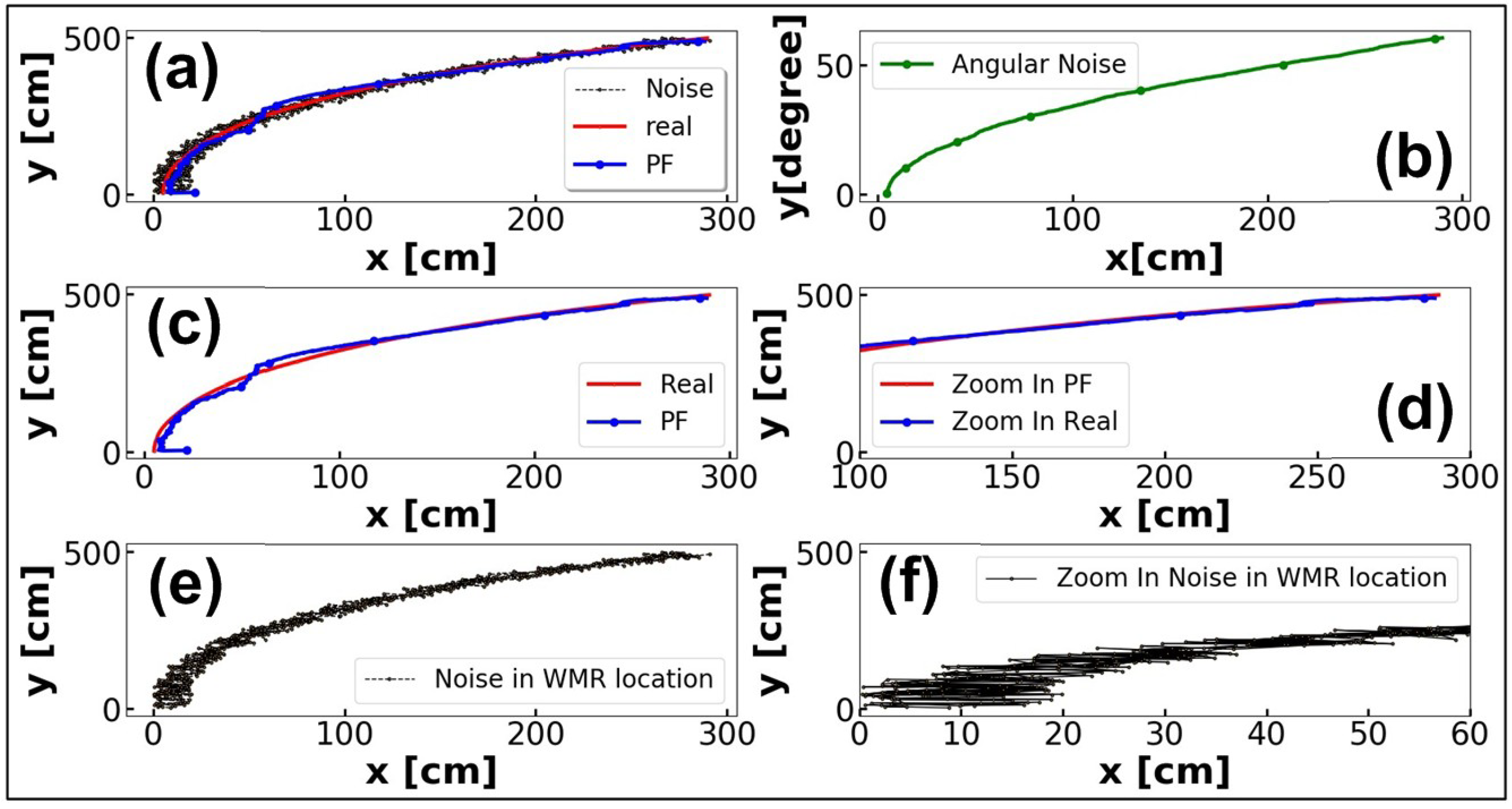
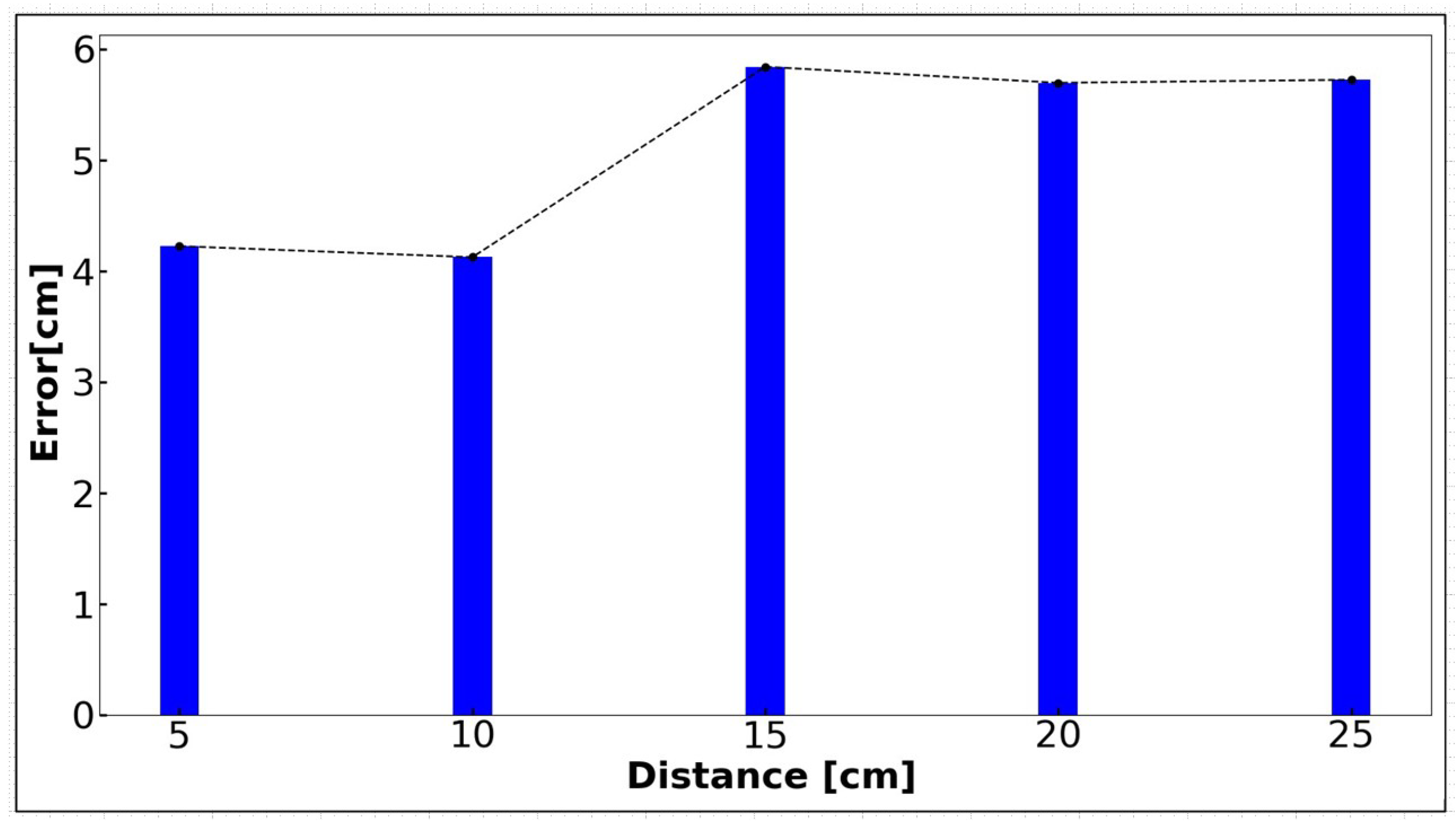
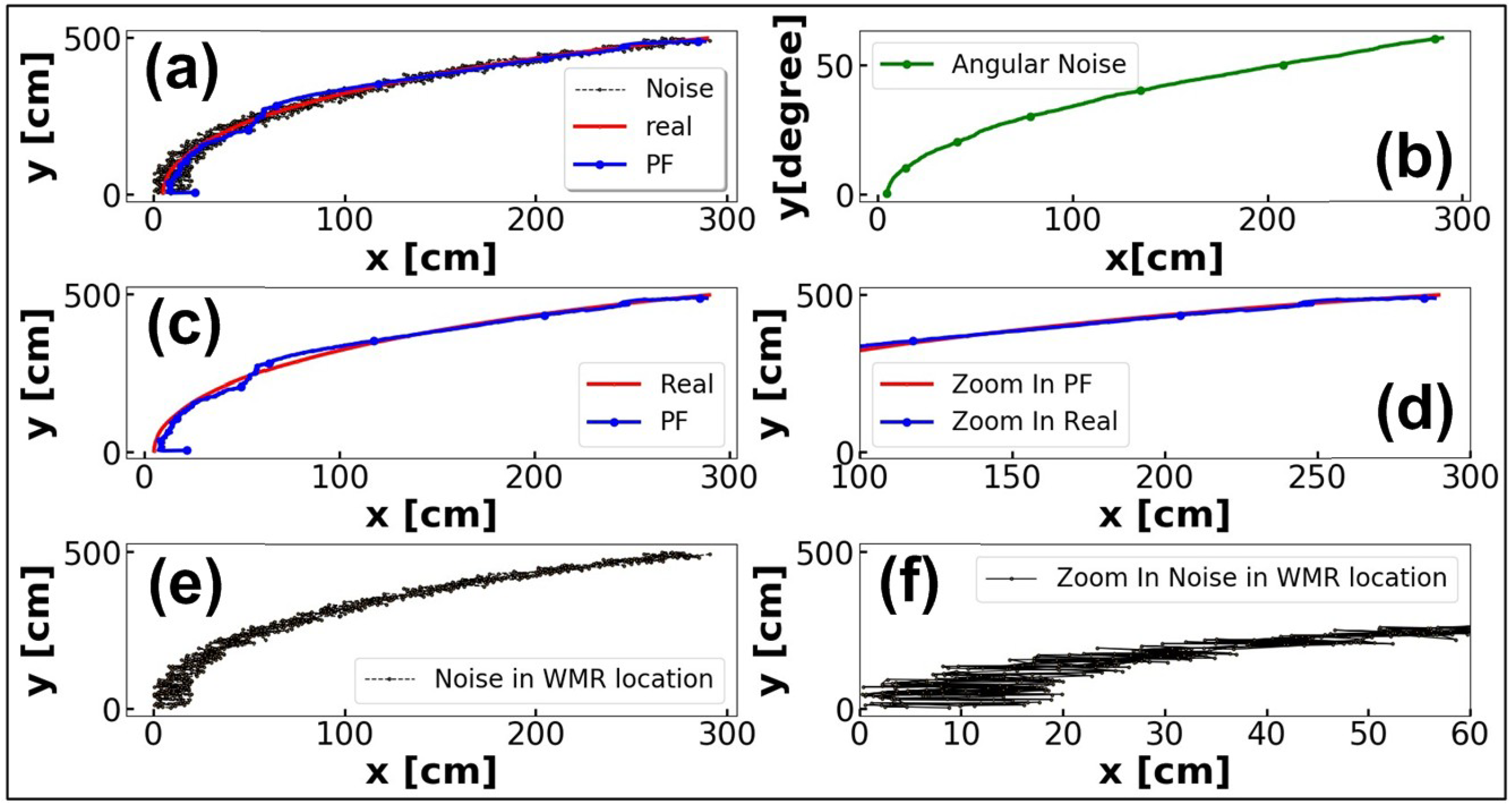
4.1. Distance Noise Effect on PF Performance
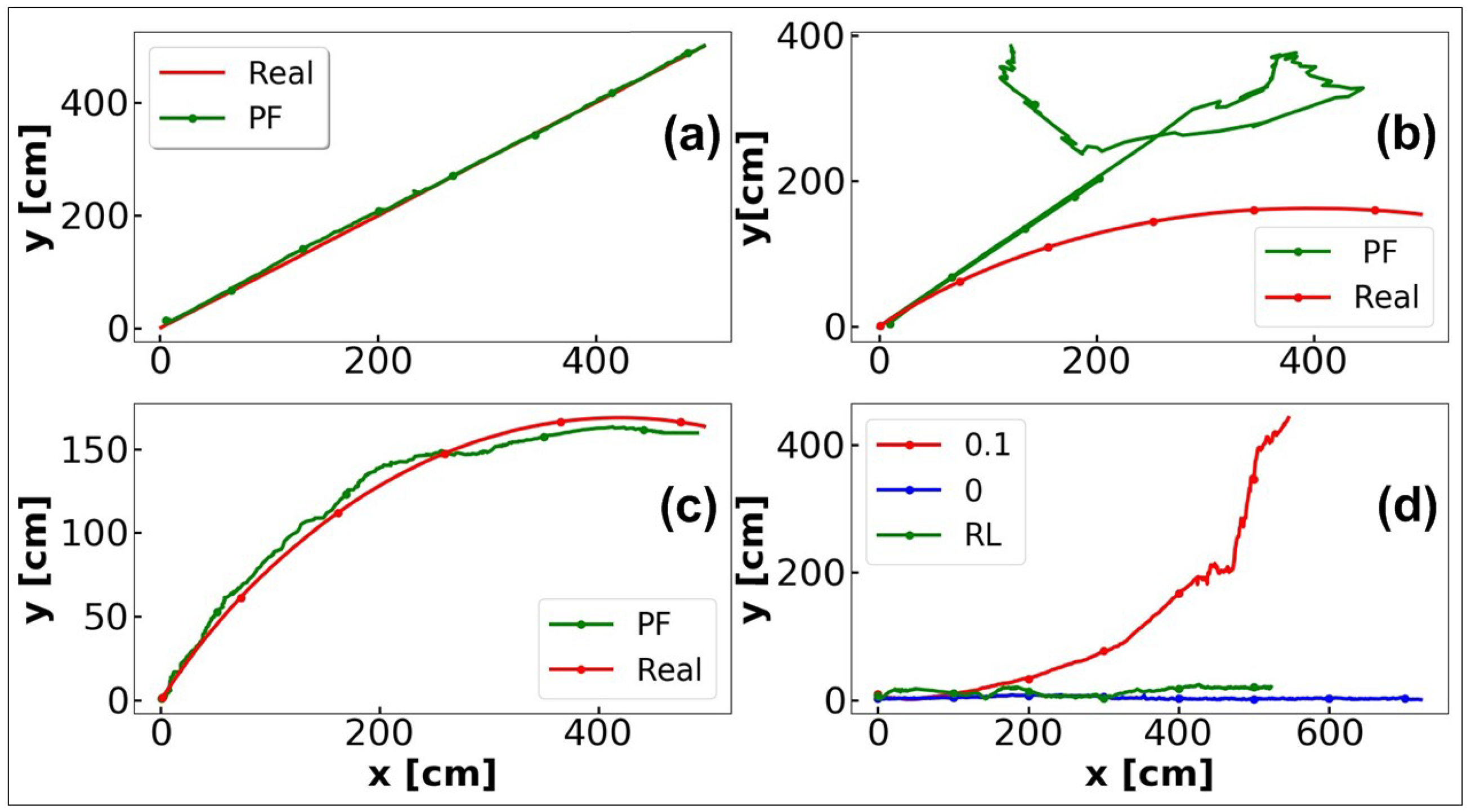
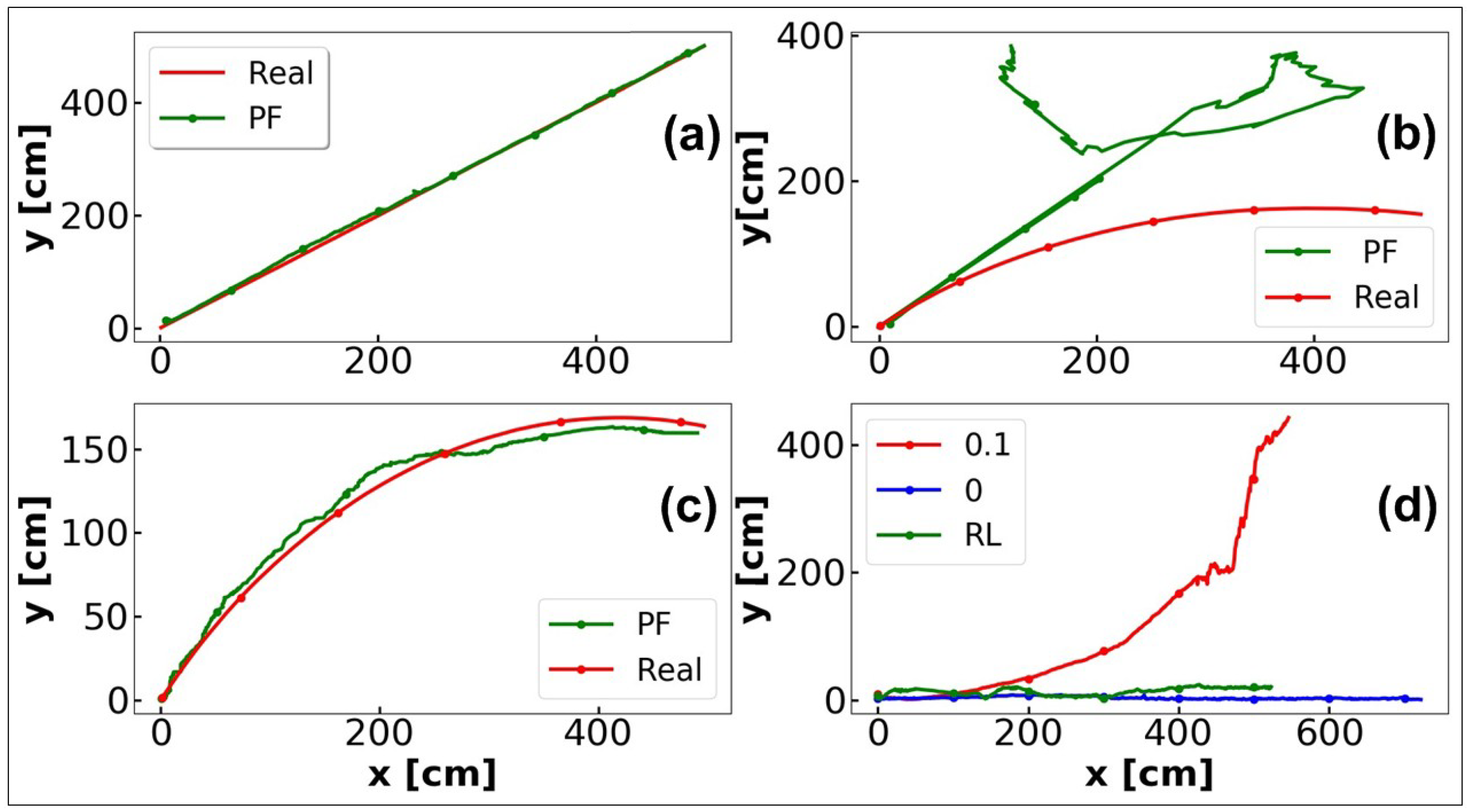
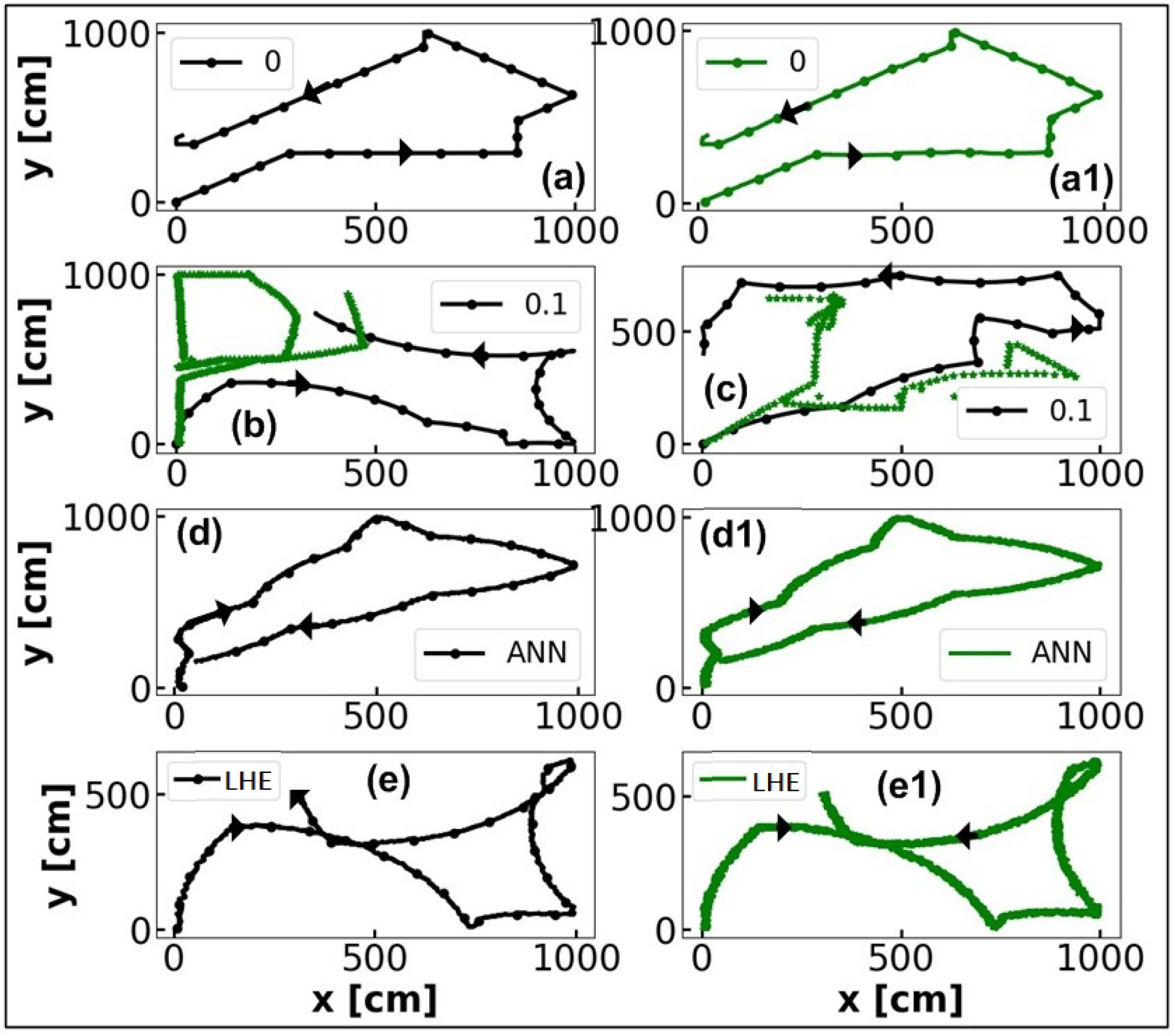
4.2. Angular Noise Effect on PF Localization Performance
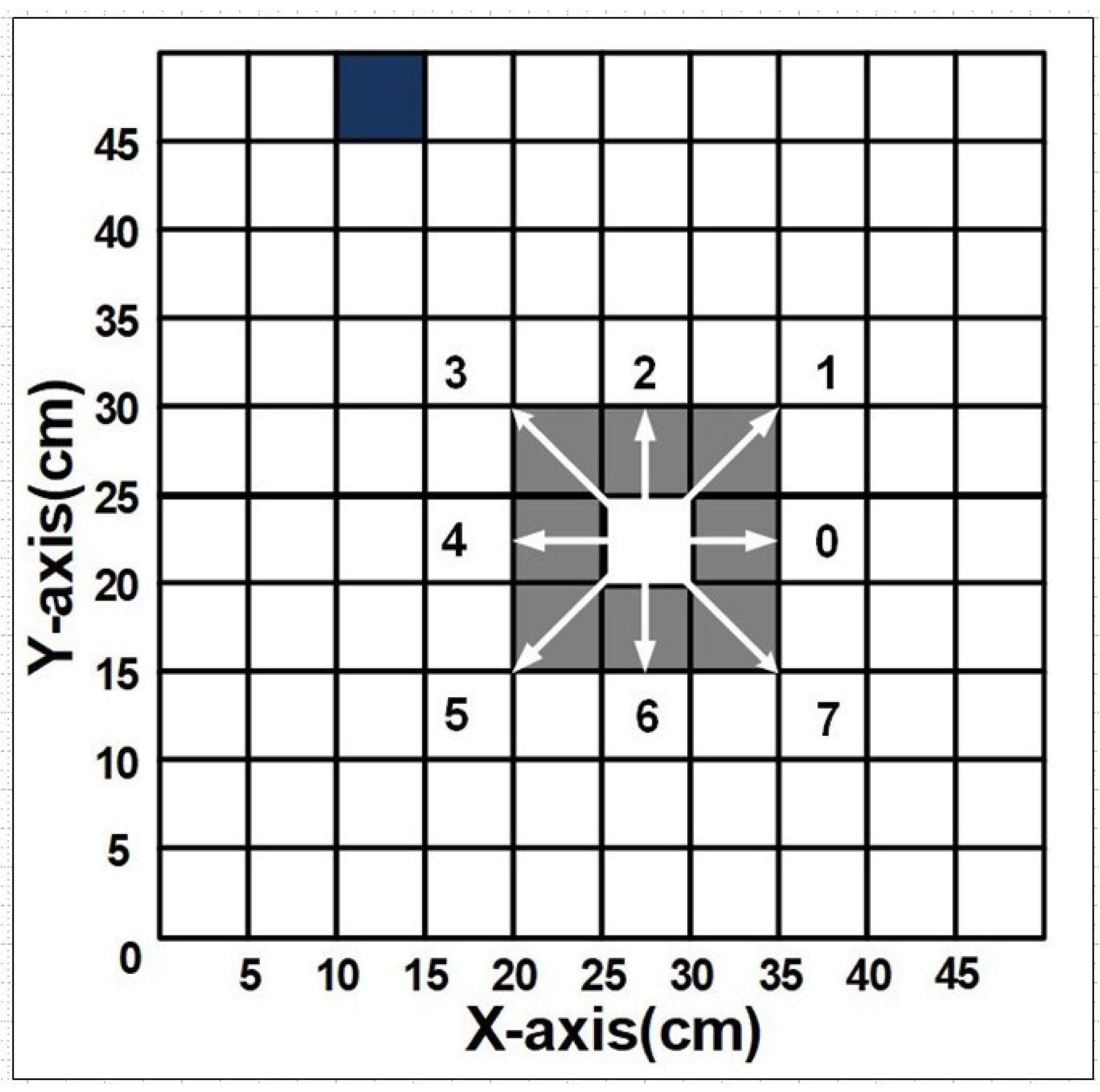
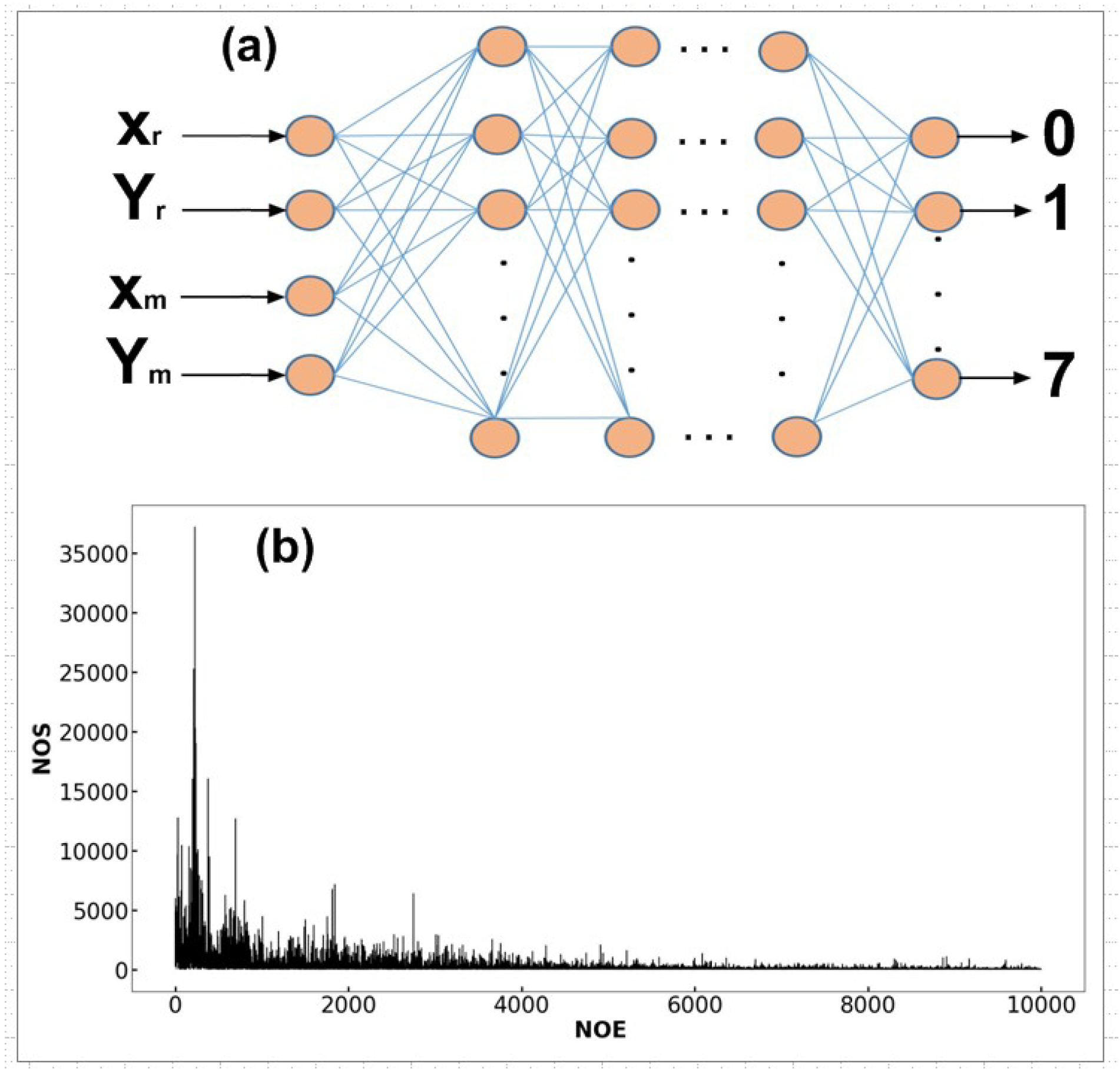
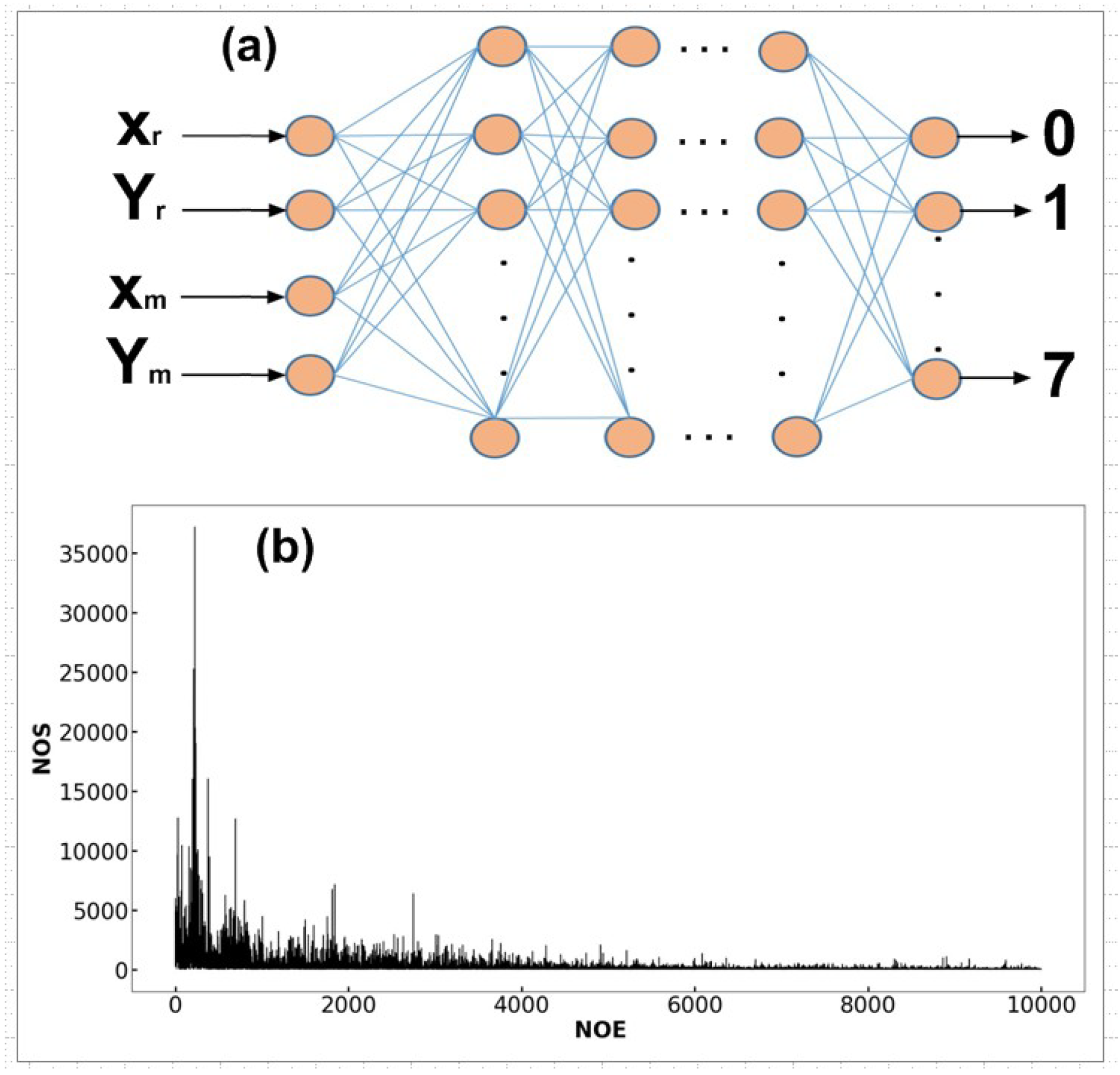
4.3. WMR Heading Estimation with RL
DQN Parameters
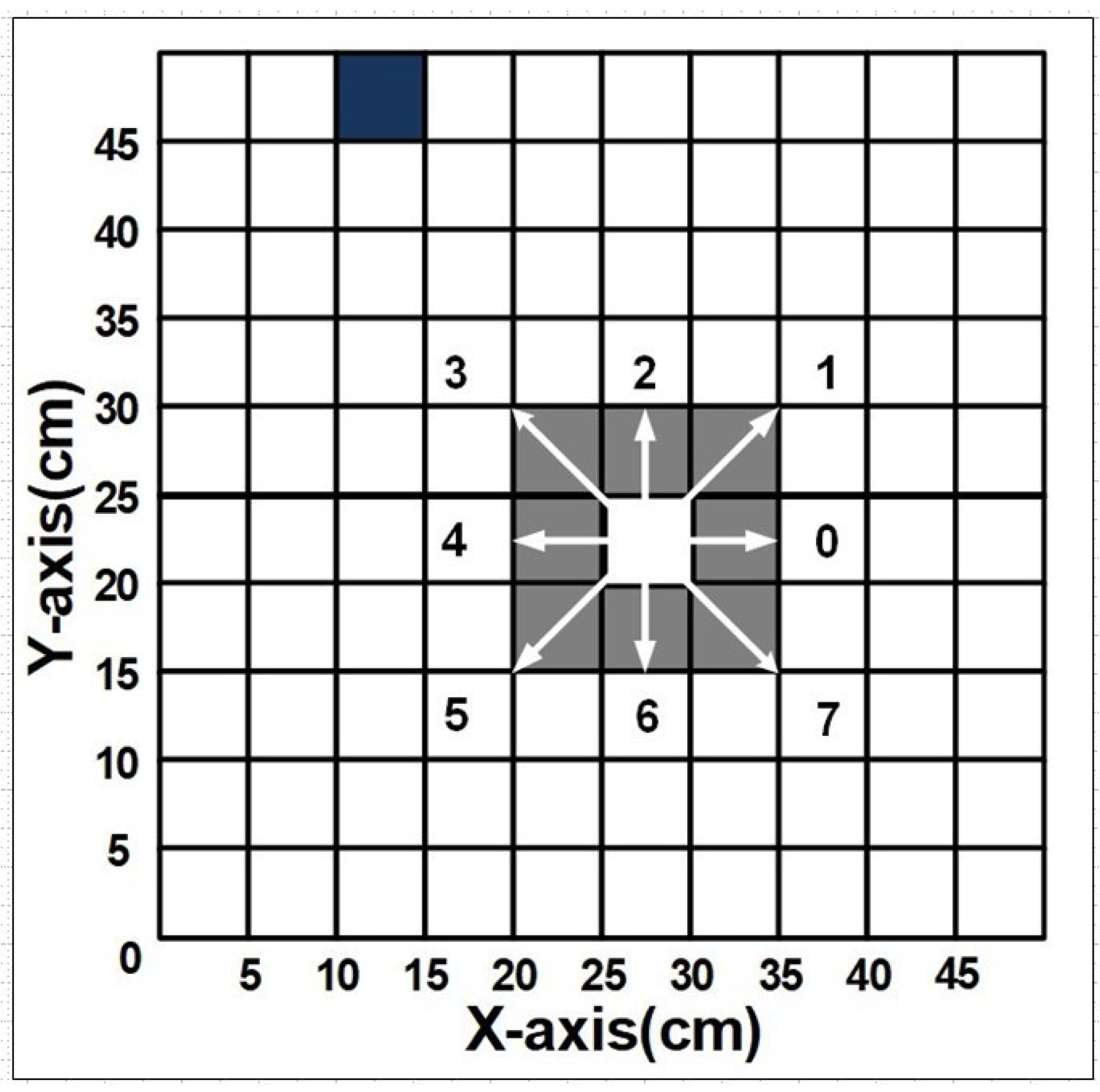
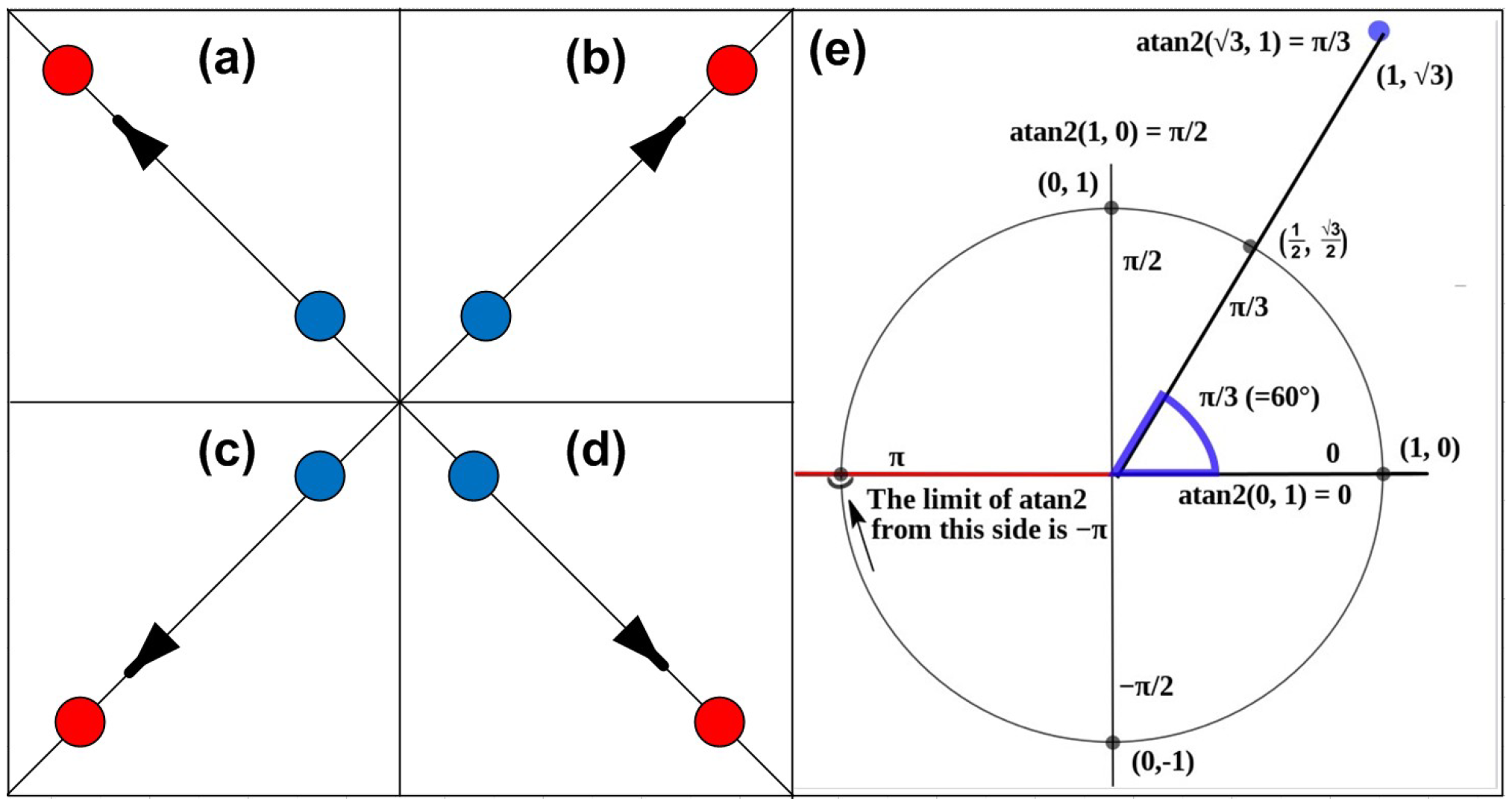
4.4. Location-based Heading Estimation (LHE)
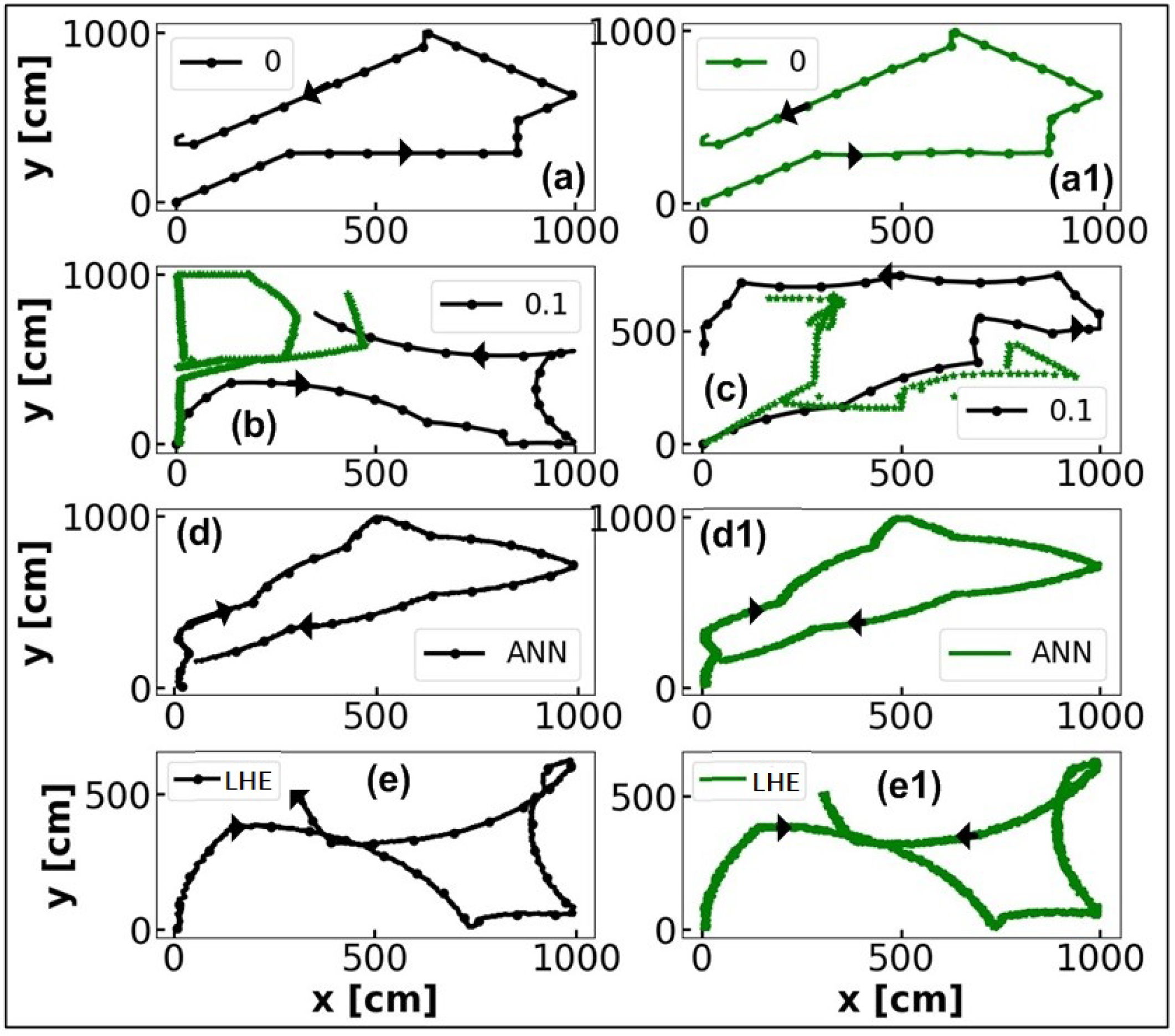
4.5. RL and LHE Heading Estimation in Large Dimensions
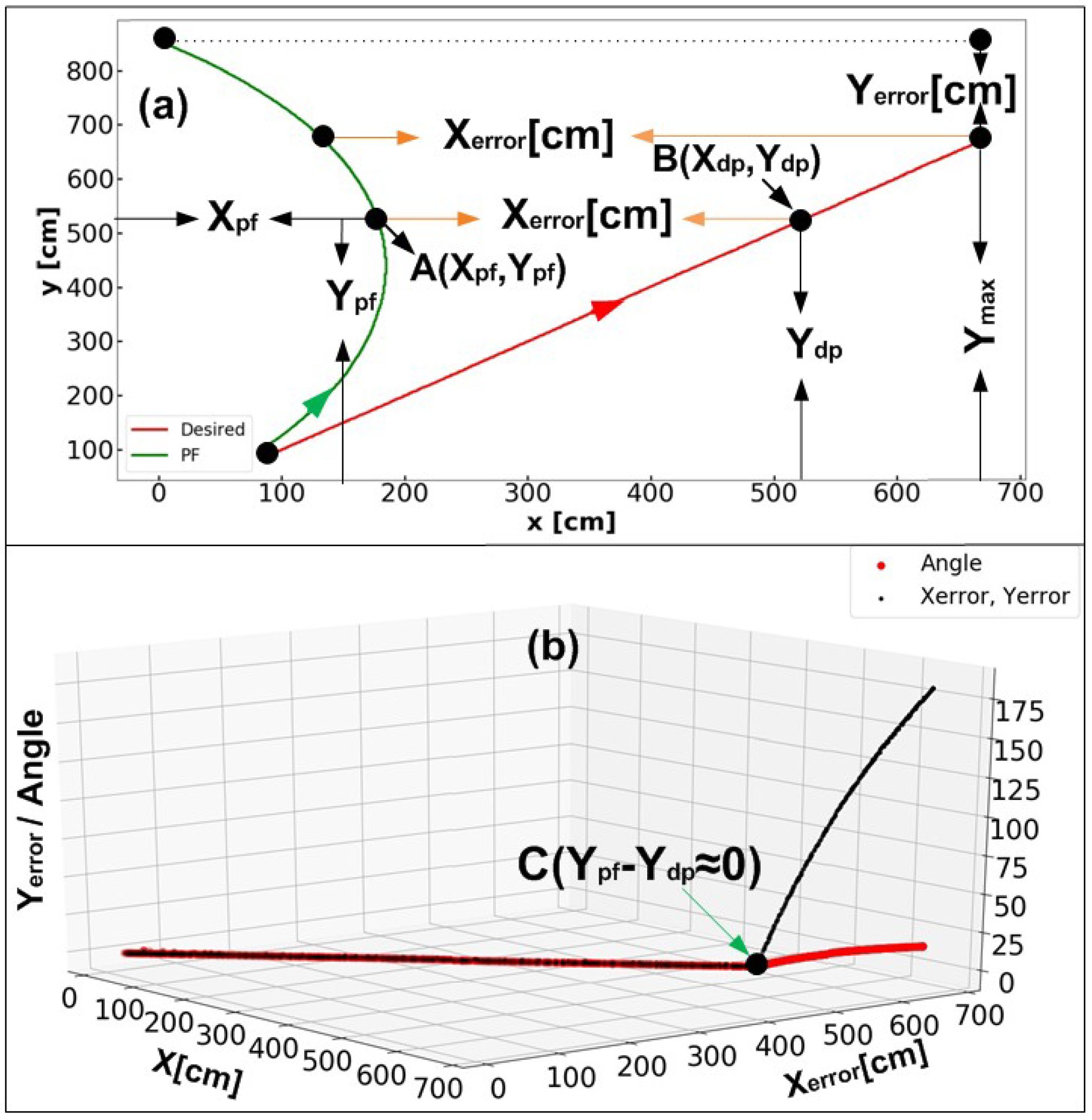
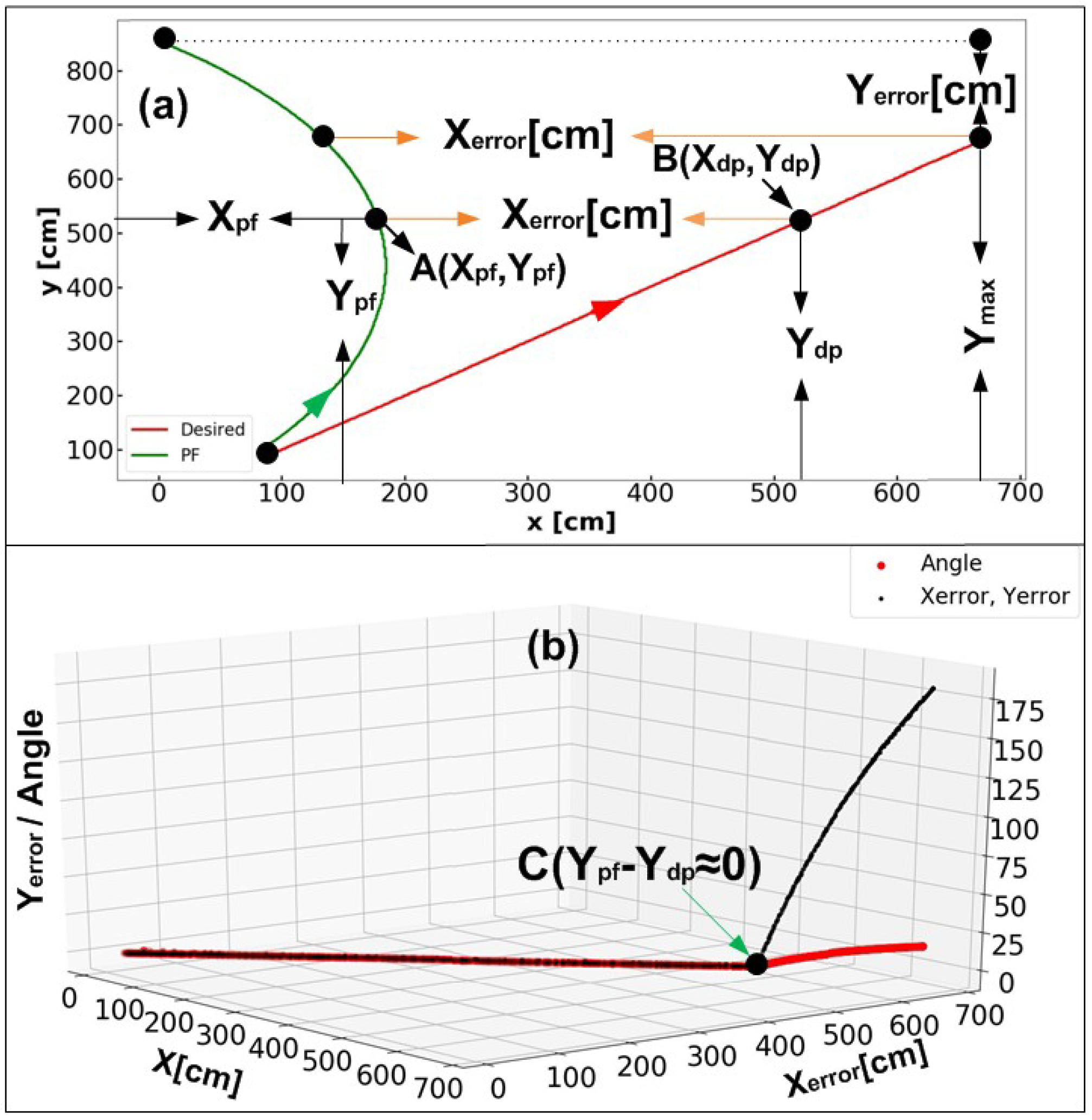
4.6. Location-Based Slip Estimation and Compensation
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Iossaqui, J.G.; Camino, J.F. Wheeled Robot Slip Compensation for Trajectory Tracking Control Problem with Time-Varying Reference Input. In Proceedings of the 9th International Workshop on Robot Motion and Control, Nagoya, Japan, 3–5 July 2013; pp. 167–173. [Google Scholar]
- He, W.; Dong, Y.; Sun, C. Adaptive Neural Impedance Control of a Robotic Manipulator With Input Saturation. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 334–344. [Google Scholar] [CrossRef]
- Tian, Y.; Sarkar, N. Control of a Mobile Robot Subject to Wheel Slip. J. Intell. Robot. Syst. 2013, 74, 915–929. [Google Scholar] [CrossRef]
- Chindamo, D.; Lenzo, B.; Gadola, M. On the Vehicle Sideslip Angle Estimation: A Literature Review of Methods, Models, and Innovations. Appl. Sci. 2018, 8, 355. [Google Scholar] [CrossRef]
- Yamauchi, G.; Suzuki, D.; Nagatani, K. Online Slip Parameter Estimation for Tracked Vehicle Odometry on Loose Slope. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 227–232. [Google Scholar]
- D’Vidhyaprakash, A.E. Studies on Affecting Factors of Wheel Slip and Odometry Error on Real-Time of Wheeled Mobile Robots: A Review. Studies 2016, 1130. [Google Scholar] [CrossRef]
- Sidharthan, R.K.; Kannan, R.; Srinivasan, S.; Balas, V.E. Stochastic Wheel-Slip Compensation Based Robot Localization and Mapping. Adv. Electr. Comp. Eng. 2016, 16, 25–32. [Google Scholar] [CrossRef]
- Yi, J.; Zhang, J.; Song, D.; Jayasuriya, S. IMU-based Localization and Slip Estimation for Skid-Steered Mobile Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 2845–2850. [Google Scholar]
- Ojeda, L.; Cruz, D.; Reina, G.; Borenstein, J. Current-Based Slippage Detection and Odometry Correction for Mobile Robots and Planetary Rovers. IEEE Trans. Robot. 2006, 22, 366–378. [Google Scholar] [CrossRef]
- Kim, D.E.; Yoon, H.N.; Kim, K.S.; Sreejith, M.; Lee, J.M. Using Current Sensing Method and Fuzzy PID Controller for Slip Phenomena Estimation and Compensation of Mobile Robot. In Proceedings of the 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 28 June–1 July 2017; pp. 397–401. [Google Scholar]
- Partovibakhsh, M.; Liu, G. Slip Ratio Estimation and Control of Wheeled Mobile Robot on Different Terrains. In Proceedings of the IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 566–571. [Google Scholar]
- Berntorp, K. Particle Filter for Combined Wheel-Slip and Vehicle-Motion Estimation. In Proceedings of the American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 5414–5419. [Google Scholar]
- Reina, G.; Ishigami, G.; Nagatani, K.; Yoshida, K. Vision-Based Estimation of Slip Angle for Mobile Robots and Planetary Rovers. In Proceedings of the IEEE International Conference on Robotics and Automation, Nice, France, 22–26 September 2008; pp. 486–491. [Google Scholar]
- Patil, M.; Abukhalil, T.; Sobh, T.S. Hardware Architecture Review of Swarm Robotics System: Self-Reconfigurability, Self-Reassembly, and Self-Replication. In Innovations and Advances in Computing, Informatics, Systems Sciences, Networking and Engineering; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Patil, M.; Abukhalil, T.; Patel, S.; Sobh, T. UB Robot Swarm-Design, Implementation, and Power Management. In Proceedings of the 12th IEEE International Conference on Control and Automation (ICCA), Kathmandu, Nepal, 1–3 June 2016; pp. 577–582. [Google Scholar]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A Reliable and Accurate Indoor Localization Method Using Phone Inertial Sensors. In Proceedings of the ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 421–430. [Google Scholar]
- Choi, K.H.; Ra, W.S.; Park, S.Y.; Park, J.B. Robust Least Squares Approach to Passive Target Localization Using Ultrasonic Receiver Array. IEEE Trans. Ind. Electron. 2014, 61, 1993–2002. [Google Scholar] [CrossRef]
- Kim, S.J.; Kim, B.K. Dynamic Ultrasonic Hybrid Localization System for Indoor Mobile Robots. IEEE Trans. Ind. Electron. 2013, 60, 4562–4573. [Google Scholar] [CrossRef]
- Saab, S.S.; Nakad, Z.S. A Standalone RFID Indoor Positioning System Using Passive Tags. IEEE Trans. Ind. Electron. 2011, 58, 1961–1970. [Google Scholar] [CrossRef]
- Yang, P.; Wu, W. Efficient Particle Filter Localization Algorithm in Dense Passive RFID Tag Environment. IEEE Trans. Ind. Electron. 2014, 61, 5641–5651. [Google Scholar] [CrossRef]
- Yang, P.; Wu, W.; Moniri, M.; Chibelushi, C.C. Efficient Object Localization Using Sparsely Distributed Passive RFID Tags. IEEE Trans. Ind. Electron. 2013, 60, 5914–5924. [Google Scholar] [CrossRef]
- Yoon, S.; Lee, K.; Rhee, I. FM-based Indoor Localization via Automatic Fingerprint DB Construction and Matching. In Proceedings of the 11th Annual International Conference on Mobile Systems, Applications, and Services, Taipei, Taiwan, 25–28 June 2013; pp. 207–220. [Google Scholar]
- Chung, J.; Donahoe, M.; Schmandt, C.; Kim, I.J.; Razavi, P.; Wiseman, M. Indoor Location Sensing Using Geo-Magnetism. In Proceedings of the 9th international conference on Mobile Systems, Applications, and Services, Bethesda, MD, USA, 28 June–1 July 2011; pp. 141–154. [Google Scholar]
- Li, B.; Gallagher, T.; Dempster, A.G.; Rizos, C. How Feasible is the Use of Magnetic Field Alone for Indoor Positioning? In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-Effort Crowdsourcing for Indoor Localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012. [Google Scholar]
- Mendes, C. Stereo-Based Autonomous Navigation and Obstacle Avoidance. IFAC Proc. Vol. 2013, 46, 211–216. [Google Scholar] [CrossRef]
- Zhen, W.; Zeng, S.; Soberer, S. Robust Localization and Localizability Estimation with a Rotating Laser Scanner. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6240–6245. [Google Scholar]
- Sharifi, M.; Chen, X. Introducing A Novel Vision Based Obstacle Avoidance Technique for Navigation of Autonomous Mobile Robots. In Proceedings of the IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015. [Google Scholar]
- Alwan, M.; Wagner, M.B.; Wasson, G.; Sheth, P. Characterization of Infrared Range-Finder PBS-03JN for 2-D Mapping. In Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 3936–3941. [Google Scholar]
- Jimenez, J.A.; Urena, J.; Mazo, M.; Hernandez, A.; Santiso, E. Three-Dimensional Discrimination between Planes, Corners and Edges Using Ultrasonic Sensors. In Proceedings of the IEEE Conference on Emerging Technologies and Factory Automation, Lisbon, Portugal, 16–19 September 2003; Volume 2, pp. 692–699. [Google Scholar]
- Memon, K.R.; Memon, S.; Memon, B.; Memon, A.R.; Shah, S.M.Z.A. Real Time Implementation of Path Planning Algorithm with Obstacle Avoidance for Autonomous Vehicle. In Proceedings of the 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016; pp. 2048–2053. [Google Scholar]
- Ortiz, G.; Treven, F.; Svensson, L.; Larsson-Edefors, P.; Johansson-Mauricio, S. A Framework for a Relative Real-Time Tracking System based on Ultra-Wideband Technology. In Proceedings of the 14th Workshop on Positioning, Navigation and Communications (WPNC), Berlin/Heidelberg, Germany, 25–26 October 2017; pp. 1–6. [Google Scholar]
- Meissner, P.; Leitinger, E.; Witrisal, K. UWB for Robust Indoor Tracking: Weighting of Multipath Components for Efficient Estimation. IEEE Wirel. Commun. Lett. 2014, 3, 501–504. [Google Scholar] [CrossRef]
- Fox, D.; Hightower, J.; Kauz, H.; Liao, L.; Patterson, D. Bayesian Techniques for Location Estimation. In Proceedings of the Workshop on Location-Aware Computing, Orlando, FL, USA, 4 December 2003. [Google Scholar]
- Savic, V.; Larsson, E.G. Experimental Study of Indoor Tracking Using UWB Measurements and Particle Filtering. In Proceedings of the IEEE 17th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Edinburgh, UK, 3–6 July 2016; pp. 1–5. [Google Scholar]
- Su, Y.; Zhao, Q.; Zhao, L.; Gu, D. Abrupt motion tracking using a visual saliency embedded particle filter. Patt. Recognit. 2014, 47, 1826–1834. [Google Scholar] [CrossRef]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P.J. Particle filters for positioning, navigation, and tracking. IEEE Trans. Signal Proc. 2002, 50, 425–437. [Google Scholar] [CrossRef]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Proc. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Park, D.H.; Stephanie, S.; Porter, R.L. Sensitivity to Noise in Particle Filters for 2-D Tracking Algorithms. Nursing 2013, 6, 58–65. [Google Scholar]
- McElroy, C.; Neirynck, D.; McLaughlin, M. Comparison of Wireless Clock Synchronization Algorithms for Indoor Location Systems. In Proceedings of the IEEE International Conference on Communications Workshops (ICC), Sydney, Australia, 10–14 June 2014; pp. 157–162. [Google Scholar]
- Ye, T.; Walsh, M.; Haigh, P.; Barton, J.; O’Flynn, B. Experimental Impulse Radio IEEE 802.15.4a UWB based Wireless Sensor Localization Technology: Characterization, Reliability and Ranging. In Proceedings of the 22nd IET Irish Signals and Systems Conference, Dublin, Ireland, 23–24 June 2011. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angular Noise (°) | Distance Noise (cm) | |||
|---|---|---|---|---|
| Noise (°) | Average Error (cm) | Noise (cm) | Average Error (cm) | |
| Without noise | 0 | 9.93 | 5 | 4.23 |
| With noise | 0.1–54.6 | 108.34 | 10 | 4.13 |
| RL mitigation | 0.1–54.6 | 9.78 | 15 | 5.85 |
| LHE mitigation | 0.1–60.4 | 14.99 | 20 | 5.70 |
| 25 | 5.73 |
| Method | Method details | Robustness | Model |
|---|---|---|---|
| KF | Simple to be implemented, only those sensor’s output can be used, that results in Gaussian form output. It can be applied to systems with know initial state. Can only be applied to linear problems. | Low against changes of parameters | Kinematic |
| EKF | It is simple to be implemented, stable, and able to deal with nonlinear input and measurement noise. The high computational effort required in the definition of the Jacobian matrices suffer from the intrinsic linearization errors. | High against input and measurement noise. | Dynamic—linear or non-linear |
| IS | VSA estimated by fusing data from IS and GPS. It typically suffers from accumulated error, not good for indoor because of GPS signal weak coverage. | High robustness against changes of conditions, but low against measurement noise. | Kinematic |
| SMO | VSA estimated using this observer in its linear or non-linear form, according to the type of vehicle model adopted. SMO features a faster convergence speed than EKF because it does not need to deal with massive matrix computation. | High robustness to model uncertainty and system noise | Dynamic—both linear and non-linear |
| CS | Estimates wheel slippage from motor current. Works only in the direction of motion, but not laterally, and it requires some knowledge of the terrain. | High against changes in parameters | Kinematic |
| RL+LHE | Simple to implement, robust, stable, deal with input and measurement noise, suitable for both indoor and outdoor. Independent of the number of WMR’s Wheels and shape. Not suffer from accumulated error. | High robustness to model uncertainty and system noise. | Both linear and non-linear |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ullah, Z.; Xu, Z.; Lei, Z.; Zhang, L. A Robust Localization, Slip Estimation, and Compensation System for WMR in the Indoor Environments. Symmetry 2018, 10, 149. https://doi.org/10.3390/sym10050149
Ullah Z, Xu Z, Lei Z, Zhang L. A Robust Localization, Slip Estimation, and Compensation System for WMR in the Indoor Environments. Symmetry. 2018; 10(5):149. https://doi.org/10.3390/sym10050149
Chicago/Turabian StyleUllah, Zakir, Zhiwei Xu, Zhang Lei, and Libo Zhang. 2018. "A Robust Localization, Slip Estimation, and Compensation System for WMR in the Indoor Environments" Symmetry 10, no. 5: 149. https://doi.org/10.3390/sym10050149
APA StyleUllah, Z., Xu, Z., Lei, Z., & Zhang, L. (2018). A Robust Localization, Slip Estimation, and Compensation System for WMR in the Indoor Environments. Symmetry, 10(5), 149. https://doi.org/10.3390/sym10050149