
From Outside to Inside: The Subtle Probing of Globular Fruits and Solanaceous Vegetables Using Machine Vision and Near-Infrared Methods

 ,
, 
 ,
,
Abstract
1. Introduction
2. External Inspection of Fruits and Vegetables
2.1. Fruit and Vegetable External-Size Detection
2.2. External-Defect Detection of Fruits and Vegetables
3. Internal Inspection of Fruits and Vegetables
4. Challenges and Trends
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tan, J.J.; Yang, S.D.; Zhou, L.Q.; Tan, H.W. High-quality citrus industry development strategies of Guangxi based on China-ASEAN fruit trade. Nanning J. South. Agric. 2020, 51, 470–476. [Google Scholar]
- Weng, M. The status quo and characteristics of China’s import and export of agricultural products. Int. Trade 2013, 6, 30–35. [Google Scholar]
- Tian, Y.; Yang, G.; Wang, Z.; Wang, H.; Li, E.; Liang, Z. Apple detection during different growth stages in orchards using the improved YOLO-V3 model. Comput. Electron. Agric. 2019, 157, 417–426. [Google Scholar] [CrossRef]
- Wu, Z.Y.; Li, Y.R.; Dong, Z.D. Research on the Development Status and Countermeasure of Chinese fruit market. Chin. Fruits Veg. 2023, 43, 79–83+87. [Google Scholar]
- Wang, H.; He, J.; Aziz, N.; Wang, Y. Spatial Distribution and Driving Forces of the Vegetable Industry in China. Land 2022, 11, 981. [Google Scholar] [CrossRef]
- Wu, L.; Zhou, Y.Q. Research on imperfect grain detection technology of wheat based on improved YOLOX. J. Henan Univ. Technol. Nat. Sci. Ed. 2023, 44, 109–117. [Google Scholar]
- Gill, H.S.; Murugesan, G.; Mehbodniya, A.; Sajja, G.S.; Gupta, G.; Bhatt, A. Fruit type grading using deep learning and feature fusion. Comput. Electron. Agric. 2023, 211, 107990. [Google Scholar] [CrossRef]
- Bai, Z.W.; Yan, F.W.; Yuan, P.H.; Zhang, H.M.; Yang, R.S. Design and experiment of fruit sorting robot based on embedded machine vision. J. Intell. Agric. Mech. 2023, 4, 61–70. [Google Scholar]
- Qin, Y.C.; Li, T.; Li, X.; Wang, M.L.; Tan, Z.Y. Design of apple damage automatic detection system based on machine vision. Food Mach. 2024, 40, 138–142. [Google Scholar]
- Wen, J.; He, J. Agricultural development driven by the digital economy: Improved EfficientNet vegetable quality grading. Front. Sustain. Food Syst. 2024, 8, 1310042. [Google Scholar] [CrossRef]
- Liu, C.H.; Li, X.; Zhu, Z.J.; Bao, Z.J.; Xie, X.N.; Yang, Z.Z.; Wang, Y.; Liu, F. Progress of Non-destructive Testing Technology in Mango Quality. Sci. Technol. Food Ind. 2021, 42, 413–422. [Google Scholar] [CrossRef]
- Varghese, R.R.; Jacob, P.M.; Sooraj, S.; Ranjan, D.M.; Varughese, J.C.; Raju, H. Detection and Grading of Multiple Fruits and Vegetables Using Machine Vision. In Proceedings of the 2021 8th International Conference on Smart Computing and Communications (ICSCC), Kochi, Kerala, India, 1–3 July 2021; pp. 85–89. [Google Scholar]
- Tang, Y.; Chen, M.; Wang, C.; Luo, L.; Li, J.; Lian, G.; Zou, X. Recognition and Localization Methods for Vision-Based Fruit Picking Robots: A Review. Front. Plant Sci. 2020, 11, 510. [Google Scholar] [CrossRef] [PubMed]
- Ismail, N.; Malik, O.A. Real-time visual inspection system for grading fruits using computer vision and deep learning techniques. Inf. Process. Agric. 2022, 9, 24–37. [Google Scholar] [CrossRef]
- Fan, S.X.; Wang, Q.Y.; Tian, X.; Yang, G.Y.; Xia, Y.; Li, J.B.; Huang, W.Q. Non-destructive evaluation of soluble solids content of apples using a developed portable Vis/NIR device. Biosyst. Eng. 2020, 193, 138–148. [Google Scholar] [CrossRef]
- Yuan, Y.H.; Yang, Z.R.; Liu, H.B.; Wang, H.B.; Li, J.H.; Zhao, L.L. Detection of early bruise in apple using near-infrared camera imaging technology combined with deep learning. Infrared Phys. Technol. 2022, 127, 104442. [Google Scholar] [CrossRef]
- Ünal, Z.; Kizildeniz, T.; Ozden, M.; Aktas, H.; Karagoz, O. Detection of bruises on red ap-ples using deep learning models. Sci. Hortic. 2024, 329, 113021. [Google Scholar] [CrossRef]
- Chen, B.Q.; Wu, Z.H.; Li, H.Y.; Wang, J. Research of machine vision technology in agricultural application: Today and the future. Sci. Technol. Rev. 2018, 36, 54–65. [Google Scholar]
- Zou, W. Research on citrus fruit size grading based on machine vision technology. Agric. Technol. 2023, 43, 48–51. [Google Scholar]
- Li, L.; Wen, T.; Dai, X.Y.; Wang, Z.Y. Online detection and grading system of citrus whole surface color. Food Mach. 2022, 38, 121–126. [Google Scholar]
- Shi, R.Y.; Tian, Y.W.; Lai, X.T.; Gu, W.J. Development of apple intelligent on-line inspection and grading system based on machine vision. China Agric. Sci. Technol. Rev. 2018, 20, 80–86. [Google Scholar]
- Peng, Y.K.; Sun, C.; Zhao, M. Dynamic non-destructive perception and grading robotic hand system for apple quality. Trans. CSAE 2022, 38, 293–303. [Google Scholar]
- Liu, J.H.; Gao, J.W.; Zhang, B.X.; Wang, J.C. Design of fruit grading system based on machine vision. Food Mach. 2023, 39, 112–118. [Google Scholar]
- Rao, J.; Lu, Z.Y. Research on external quality grading method of spherical fruit based on machine vision. Technol. Innov. 2022, 63–65. [Google Scholar]
- Zhang, Y.H.; Meng, Y.; Zhang, M.G.; Jiang, P.H.; Chen, D.J.; Guo, F.J. Fruit comprehensive quality detection based on Near infrared, machine vision and Information Fusion. Food Ind. 2018, 39, 247–250. [Google Scholar]
- Su, B.N.; Hua, X.Y. Research on strawberry image processing based on machine vision. J. Cap. Norm. Univ. (Nat. Sci. Ed.) 2018, 39, 42–45. [Google Scholar]
- Li, J.H.; Yi, K.C.; Liu, L.; Zhang, X.W.; Sun, Y.R. Research on blueberry fruit grading based on machine vision. Wuhan J. Jianghan Univ. 2021, 49, 64–69. [Google Scholar]
- Tang, Z.S.; Yuan, J.L.; Kang, L.H.; Cheng, L.X.; Lu, T.; Yang, C.; Zhang, F. Potato tuber skin roughness grading analysis based on image characteristics recognition. Sci. Agric. Sin. 2023, 56, 4428–4440. [Google Scholar]
- Zhang, Y.J.; Zhao, J.X. Research on daylily joint detection algorithm based on multiple neural networks. J. Chin. Agric. Mech. 2024, 45, 228–234. [Google Scholar]
- Wang, M.X.; Meng, Q.X.; Wang, M.J. Design of grading Control system of black Fungus Based on machine Vision. China Sci. Technol. Inf. 2023, 21, 91–94. [Google Scholar]
- Bhargava, A.; Bansal, A.; Goyal, V. Machine Learning-Based Detection and Sorting of Multiple Vegetables and Fruits. Food Anal. Methods 2022, 15, 228–242. [Google Scholar] [CrossRef]
- Chen, Y.X.; Yang, Y. Research on appearance quality of mango based on machine vision. Electron. Manuf. 2023, 31, 68–71. [Google Scholar]
- Wu, Y.L.; Chen, Y.Y.; Lian, X.Q.; Liao, Y.; Gao, C.; Guan, H.N.; Yu, C.C. Study on the Identification Method of Citrus Leaves Based on Hyperspectral Imaging Technique. Spectrosc. Spectr. Anal. 2021, 41, 3837–3843. [Google Scholar]
- Zhang, X.X.; Li, P.; Yu, M.; Jiang, L.W.; Liu, X.; Shan, Y. Progress in non-destructive citrus quality detection using near-infrared spectroscopy. Beijing Shipin Kexue/Food Sci. 2022, 43, 260–268. [Google Scholar]
- Zhang, Z.J.; Fu, X.Y.; Chen, K.M.; Zhao, Z.L.; Zhang, Z.X.; Zhao, J. Research on non-destructive detection method of moldy apple core by fusing density and spectral features. Beijing Food Ferment. Ind. 2022, 48, 281–287. [Google Scholar]
- Chandel, A.K.; Khot, L.R.; Sallato, B.C. Apple powdery mildew infestation detection and mapping using high-resolution visible and multispectral aerial imaging technique. Sci. Hortic. 2021, 287, 110228. [Google Scholar] [CrossRef]
- Xiao, J.-R.; Chung, P.-C.; Wu, H.-Y.; Phan, Q.-H.; Yeh, J.-L.A.; Hou, M.T.-K. Detection of Strawberry Diseases Using a Convolutional Neural Network. Plants 2021, 10, 31. [Google Scholar] [CrossRef]
- Liu, X.G.; Fan, C.; Li, J.N.; Gao, Y.L.; Zhang, Y.Y.; Yang, Q.L. Identification method of strawberry based on convolutional neural network. Trans. Chin. Soc. Agric. Mach. 2020, 51, 237–244. [Google Scholar]
- Wang, W.; Fang, Y.J.; Liu, J.Q.; Wang, Z.Q. Blueberries grading detection algorithm based on machine vision. Mod. Electron. Technol. 2018, 41, 38–42. [Google Scholar]
- Xue, Y.J. Research status and prospect of potato grading technology. Xinjiang Agric. Mech. 2024, 54–57. [Google Scholar]
- Bhargava, A.; Bansal, A. Automatic Detection and Grading of Multiple Fruits by Machine Learning. Food Anal. Methods 2020, 13, 751–761. [Google Scholar] [CrossRef]
- Zhou, H.; Zhuang, Z.; Liu, Y.; Liu, Y.; Zhang, X. Defect Classification of Green Plums Based on Deep Learning. Sensors 2020, 20, 6993. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.H.; An, X.S.; Gao, S.M.; Li, S.J.; Kang, H.W. A Deep Learning-Based Vision System Combining Detection and Tracking for Fast On-Line Citrus Sorting. Front. Plant Sci. 2021, 12, 622062. [Google Scholar] [CrossRef]
- Zhang, X.; Xun, Y.; Chen, Y. Automated identification of citrus diseases in orchards using deep learning. Biosyst. Eng. 2022, 223, 249–258. [Google Scholar] [CrossRef]
- Hu, W.X.; Xiong, J.T.; Liang, J.H.; Xie, Z.M.; Liu, Z.Y.; Huang, Q.Y.; Yang, Z.A. A method of citrus epidermis defects detection based on an improved YOLOv5. Biosyst. Eng. 2023, 227, 19–35. [Google Scholar] [CrossRef]
- Manley, M. Near-infrared spectroscopy and hyperspectral imaging: Non-destructive analysis of biological materials. Chem. Soc. Rev. 2014, 43, 8200–8214. [Google Scholar] [CrossRef]
- Ma, J.J.; Wang, K.Q. Research Progress of Optical Nondestructive Testing Technology for Fruit Quality. Sci. Technol. Food Ind. 2021, 42, 427–437. [Google Scholar]
- Ding, C.; Chen, J.Y.; Zheng, M.M.; Zhang, L.; Wei, W.; Zhang, Y.N. Research progress of 529 hyperspectral image change detection technology. Chin. J. Image Graph. 2024, 530, 1714–1729. [Google Scholar] [CrossRef]
- Liao, Z.Q.; He, C.X. Research on prediction and grading of sugar content of apple based on Near-infrared spectroscopy. Inf. Technol. Informatiz. 2023, 93–98. [Google Scholar]
- Wang, J.F.; Du, C.L.; Zou, X.Q.; Lin, C.Y.; Hao, Y.B. Research on non-destructive testing technology of apple based on hyperspectral and BP neural network. J. Jiamusi Univ. (Nat. Sci. Ed.) 2023, 41, 98–101+105. [Google Scholar]
- Huang, Y.P.; Yang, Y.T.; Sun, Y.; Zhou, H.Y.; Chen, K.J. Identification of Apple Varieties Using a Multichannel Hyperspectral Imaging System. Sensors 2020, 20, 5120. [Google Scholar] [CrossRef]
- Wang, Y.L.; Peng, Y.K.; Zhao, X.L.; Shen, L.Y. Design and experiment of Non-destructive testing and grading device for corn seed vigor. Trans. Chin. Soc. Agric. Mach. 2020, 51, 350–356. [Google Scholar]
- Chia, K.S.; Jam, M.N.H.; Gan, Z.; Ismail, N. Pre-dispersive near-infrared light sensing in non-destructively classifying the brix of intact pineapples. J. Food Sci. Technol. 2020, 57, 4533–4540. [Google Scholar] [CrossRef]
- Li, B.; Han, Z.Y.; Wang, Q.; Sun, Z.X.; Liu, Y.D. Research on scratch grade detection of loquat based on hyperspectral imaging technology. Spectrosc. Spectr. Anal. 2023, 43, 1792–1799. [Google Scholar]
- Lu, W.; Cai, M.M.; Zhang, Q.; Li, S. Hyperspectral and ensemble learning for fast grading of Lycium. Spectrosc. Spectr. Anal. 2021, 41, 2196–2204. [Google Scholar]
- Liu, Y.D.; Li, M.P.; Hu, J.; Xu, Z.; Cui, H.Z. Study on detection of navel orange granulation by near infrared hyperspectral spectroscopy. Spectrosc. Spectr. Anal. 2022, 42, 1366–1371. [Google Scholar]
- Sun, X.P.; Liu, C.C.; Lu, H.Z.; Xu, S. Detection of honey pomelo in different granulation levels based on near-infrared transmittance spectroscopy combined with machine vision. J. Food Sci. Technol. 2021, 39, 37–45. [Google Scholar]
- Miguel, V.-C.; María-Teresa, S.; Petter, W.J.; Kristian, A.N.; Dolores, P.-M. Near infrared light penetration in watermelon related to internal quality evaluation. Postharvest Biol. Technol. 2023, 204, 112477. [Google Scholar]
- Zhang, L.; Sun, J.; Zhou, X.; Nirere, A.; Wu, X.; Dai, R. Grading detection of saccharin jujube based on hyperspectral imaging technology. J. Food Process. Preserv. 2020, 44, e14591. [Google Scholar] [CrossRef]
- Chi, J.T.; Zhang, S.J.; Ren, R.; Lian, M.R.; Sun, S.S.; Mu, B.Y. Detection of eggplant external defects using hyperspectral technology. Mod. Food Sci. Technol. 2021, 37, 279–284+178. [Google Scholar]
- Zhang, J.W.; Zhi, J.H.; Guan, X.M.; Zhang, S.; Su, T.; Lin, S.Y.; Yu, P.L.; Li, M.B. Identification Method of Understory Crops Quality Grade Using Hyperspectral Image Technology: A Case of Astragalus membranaceus. J. Northeast. For. Univ. 2024, 52, 79–84. [Google Scholar]
- Çetin, N.; Karaman, K.; Kavuncuoglu, E.; Yildirim, B.; Jahanbakhshi, A. Using hyperspectral imaging technology and machine learning algorithms for assessing internal quality parameters of apple fruits. Chemom. Intell. Lab. Syst. 2022, 230, 104650. [Google Scholar] [CrossRef]
- Magwaza, L.S.; Tesfay, S.Z. A review of destructive and non-destructive methods for determining avocado fruit maturity. Food Bioproc. Technol. 2015, 8, 1995–2011. [Google Scholar] [CrossRef]
- Davur, Y.J.; Kämper, W.; Khoshelham, K.; Trueman, S.J.; Bai, S.H. Estimating the Ripeness of Hass Avocado Fruit Using Deep Learning with Hyperspectral Imaging. Horticulturae 2023, 9, 599. [Google Scholar] [CrossRef]
- Sharma, S.; Sirisomboon, P.; Sumesh, K.C.; Terdwongworakul, A.; Phetpan, K.; Kshetri, T.B.; Sangwanangkul, P. Near-infrared hyperspectral imaging combined with machine learning for physicochemical-based quality evaluation of durian pulp. Postharvest Biol. Technol. 2023, 200, 112334. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, Z.; Ren, Z.; Wang, S.; Yin, X.; Zhang, D.; Wang, C.; Zheng, H.; Du, J.; Ma, C. A non-destructive determination of protein content in potato flour noodles using near-infrared hyperspectral imaging technology. Infrared Phys. Technol. 2023, 130, 104595. [Google Scholar] [CrossRef]
- Qi, H.N.; Shen, C.; Chen, G.; Zhang, J.Y.; Chen, F.N.; Li, H.Y.; Zhang, C. Rapid and non-destructive determination of soluble solid content of crown pear by visible/near-infrared spectroscopy with deep learning regression. J. Food Compos. Anal. 2023, 123, 105585. [Google Scholar] [CrossRef]
- Zhang, B.; Gu, B.; Tian, G.; Zhou, J.; Huang, J.; Xiong, Y. Challenges and solutions of optical-based nondestructive quality inspection for robotic Fruits and vegetables grading systems: A technical review. Trends Food Sci. Technol. 2018, 81, 213–231. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Objects | Characteristics | Conclusion | Advantages | Disadvantages |
|---|---|---|---|---|---|
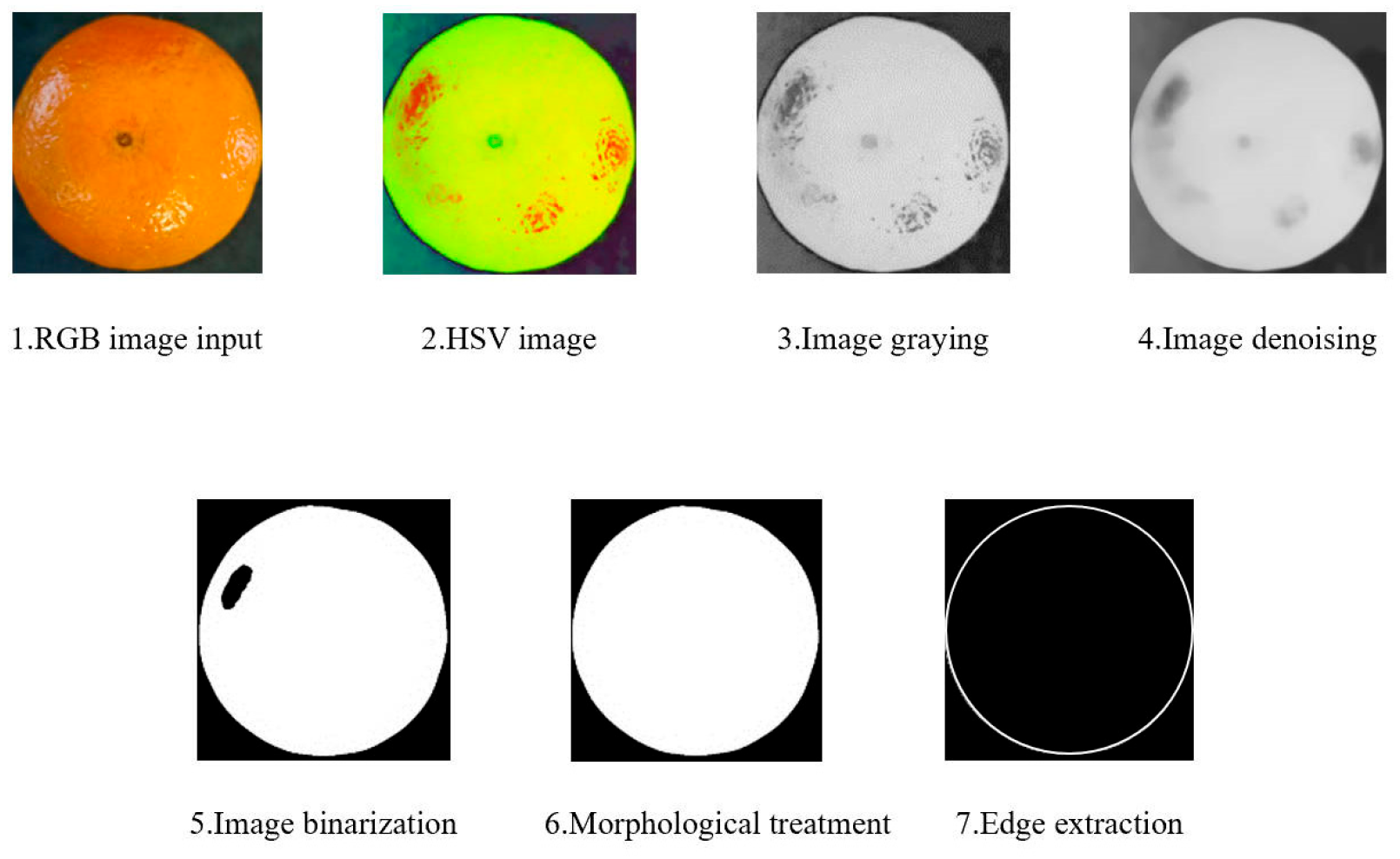
| [19] | Citrus | Python does the processing Canny edge detection. Find contours of citrus counter area to calculate the contour area. | It has high accuracy, saves time and effort, and reduces the interference of human factors. | ~ | ~ |
| [20] | The 2D projection image is used for integral calculation. | The error is 5%. The accuracy is 90.54%. | Comprehensive and concise information. | Accuracy needs to be improved. | |
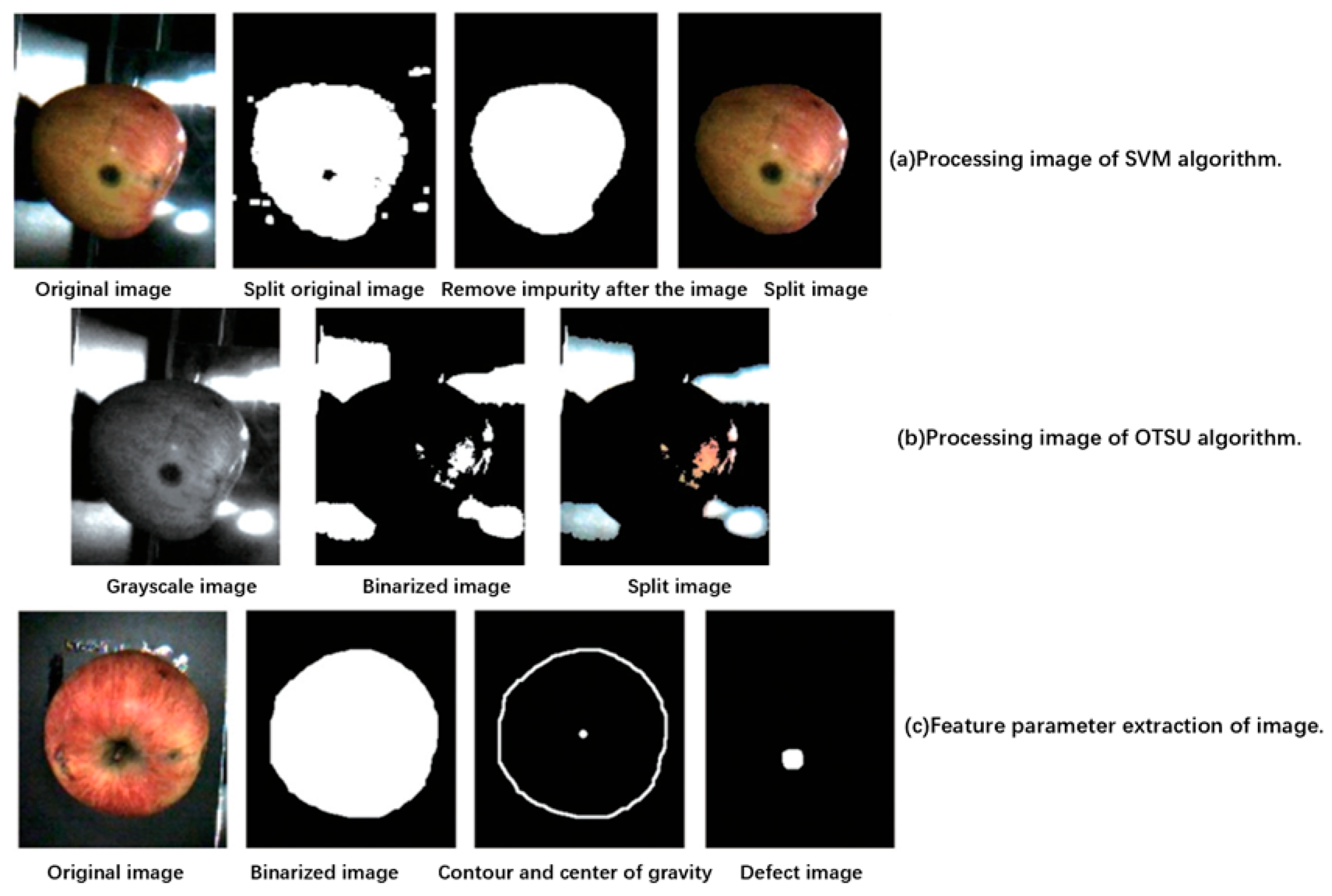
| [21] | Apple | Threshold segmentation. Fisher support vector machine. | Apple’s overall accuracy is 95%. | Accurately divides the damage area. Improves grading efficiency | Minor defects cannot be accurately identified |
| [22] | Machine vision is combined with a robotic arm. | The grading accuracy is 95%. The time for grading is about 5.2 s. | Machine vision is combined with a robotic arm. It has reliability and practicability. Multiple metrics. | The number of indicators is relatively small. Detection speed limited the manipulator speed. | |
| [23] | PP-YOLO Object Detection algorithm writes the control software in Python (PyQt5) | The error is within ±1.5 mm. | PP-YOLO object detection: low false detection rate and high efficiency. | ~ | |
| [24] | Spherical fruit | Minimal enclosing matrix. Morphological region-filling analysis of fruit surface defects. | The average recognition rate is 94.4%. | Surface-defect features can be extracted. The grading accuracy is high. | Full surface inspection is not possible. Fruit surface defect characteristics have a certain effect. |
| [25] | A variety of fruits | Multi-sensor information fusion technology. | Fruit grading should be considered in many ways. | A precise grading of the fruit can be made. | Lacks multi-scene and is static. |
| [26] | Strawberry | The SLR camera performs image acquisition and processing. Median filtering denoising, gray enhancement and binarization processing. | The white background can clearly segment the strawberry fruit. The median-filtering algorithm can better remove the salt-and-pepper noise mixed in the strawberry image collection process. Five typical algorithms can segment the image contour clearly. | On-line, lossless and good real-time performance. | Effects such as strawberry rot were not considered. The segmentation and maturity recognition were completed without considering the complex background. |
| [27] | Blueberries | Maximum between-cluster variance-method morphology. Least squares method. | The area accuracy is 98.93%. The accuracy of the perimeter is 87.74%. | Grading was performed based on area and perimeter. The complexity and cost are low. | Fruiting stems cannot be segmented accurately. Some images are unimodal and cannot be segmented out. |
| [28] | Potato | Support vector machine. BP neural network model. | The average accuracy of SVM is 87.5%. | The texture structure of the image processed by the weighted average method is clear. | The recognition accuracy is low. |
| [29] | Day lily flower | Heatmap branch. Improved non-maximum suppression algorithm. Joint-point prediction. | The recognition accuracy is 91.02%. The positioning accuracy is 99.8%. | Satisfies most models. High positioning accuracy. Detection-box prediction is changed to joint-point prediction. | The recognition accuracy is low. Recognition and localization in complex environments is not considered. |
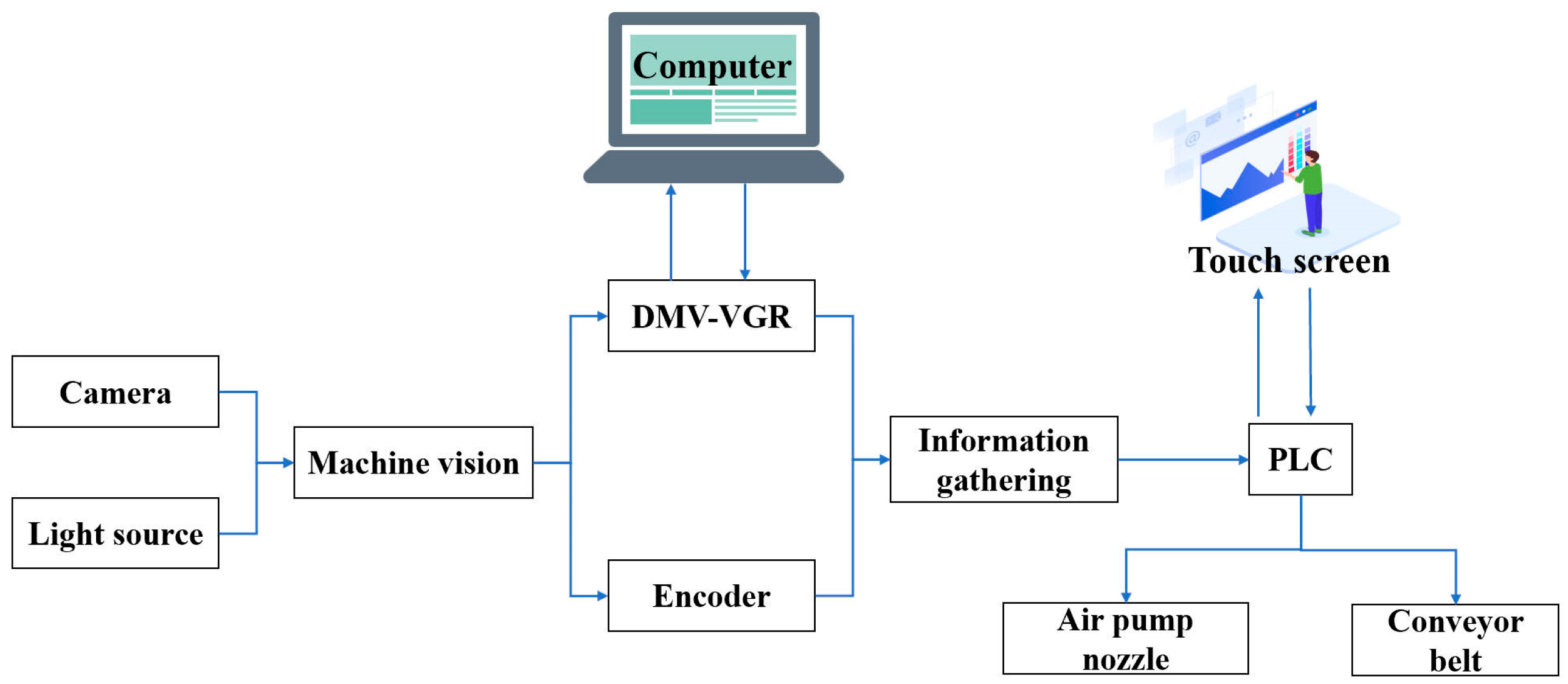
| [30] | Black fungus | The DMV-VGR software processes the images. PLC data monitoring. | A preliminary grading can be performed. | Provides a hierarchical scheme. | Low accuracy. No omnidirectional acquisition. There are uncertainties. |
| [31] | A variety of fruits and vegetables | Gaussian filtering. Fuzzy C-means clustering. Grab-cut. | The detection and grading accuracy of SVM are 97.63% and 96.59%, respectively. | Consider the impact of multiple factors. The accuracy is relatively high. | ~ |
| [12] | SVM, K-NN, Anna | The accuracy of the proposed system is 70%. | It works without a network. | The accuracy is relatively low, and more fruits and vegetables should be introduced for experimentation. | |
| [32] | Mango | Sobel operator and Canny operator. MATLAB is used for image processing. | The accuracy of the first-grade fruit is 93.3%. The accuracy of the second-grade fruit is 95%. The accuracy of the third-grade fruit is 95%. | Solves the problem of unclear edge and discontinuity. | The lighting conditions are not uniform. |
| Object | Network | Defect Condition | Dataset Condition | Network Performance | |||||
|---|---|---|---|---|---|---|---|---|---|
| Image Content | Image Background | Recall | Accuracy | F1 Score | Precision | mAP | |||
| Defective mangoes [32]) | MATLAB software | Rot, spots, scars | A mangled mango | Laboratory | ~ | 95% | ~ | ~ | ~ |
| Green plum defects [42] | Improved VGG network | Rot, spots, scars, cracks | A damaged green plum | Laboratory | ~ | 93.8% | ~ | ~ | ~ |
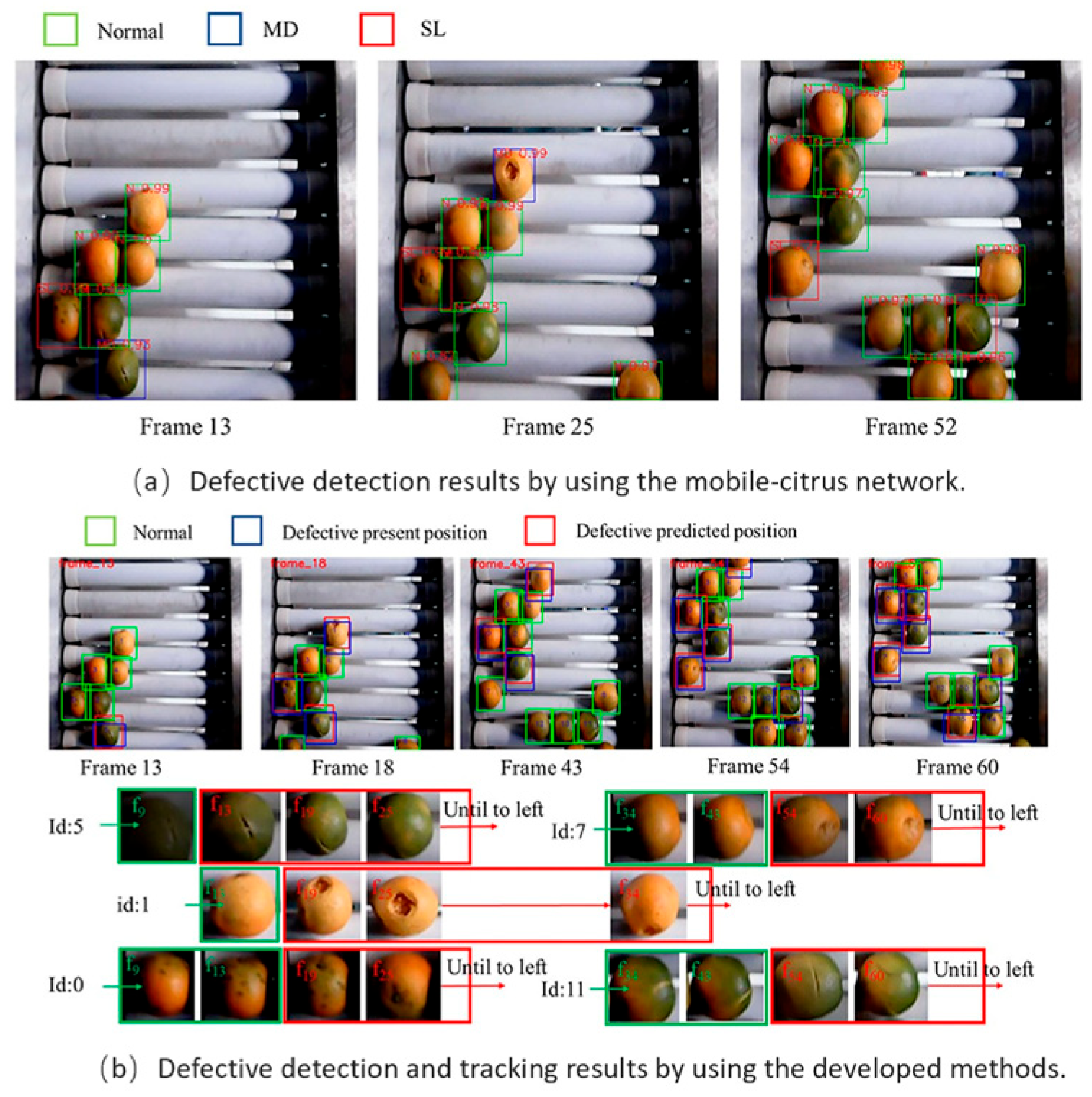
| Defective citrus [43] | Mobile-Citrus | Mechanical damage and skin lesions | Multiple defective citrus fruits | Laboratory | 87.0% | 88.0% | 87.1% | ~ | ~ |
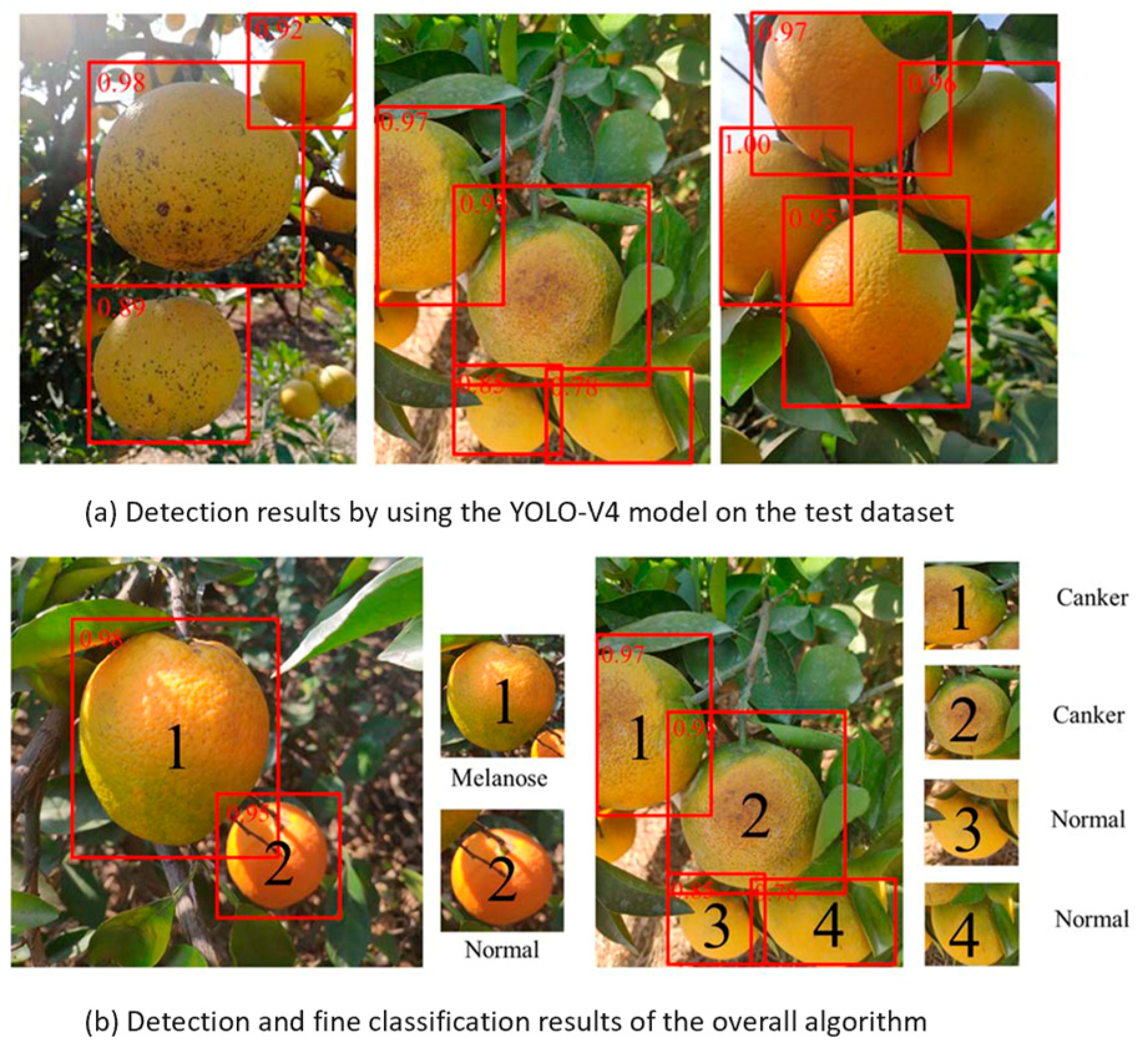
| Defective citrus [44] | YOLOv4 and EfficientNet | Canker, anthracnose, sunscald, greening, and melanose | Multiple defective citrus fruits | Orchard | ~ | 89.0% | 87.2% | ~ | ~ |
| Citrus epidermal defects [45] | Based on the improved YOLOv5 | Injury and scar | A defective citrus fruit | Laboratory | 95.1% | ~ | ~ | 94.0% | 95.5% |
| Author | Objects | Characteristics | Conclusion | Advantages | Disadvantages |
|---|---|---|---|---|---|
| [49] | Apple | Near-infrared spectroscopy. PLS model. PCA dimensionality reduction. Ridge processing. | The accuracy of grading ranged from 88.38% to 90.84%. | The ridge regression model has good stability. Multiple-preprocessing and dimensionality-reduction algorithms. | Low accuracy- The data are not good enough and there is overfitting. |
| [22] | Machine vision. Normalized spectral ratio method. | The grading accuracy is 95%. | Nir spectroscopy is combined with robotic arms and machine vision. More indicators. | Lack of internal metrics. The dynamic acquisition of the spectrum will have an impact on the model. | |
| [50] | Hyperspectral technology is combined with BP neural network. | The correlation coefficient R of the prediction set reaches 0.86, and the root mean square error is 0.69. | The computational complexity of the model is reduced without losing the main information. | Fruit stem and calyx removed, the area is small. | |
| [51] | Multi-channel hyperspectral. | The accuracy is 0.994. | Spectral combination gives better accuracy in variety detection. | Spectral combination was not able to improve the results of the best single SR spectra in the visible region. | |
| [52] | Corn | Near-infrared reflectance spectroscopy. Partial least squares. | The SG convolution accuracy is 98.7% and the prediction set accuracy is 96%. The overall accuracy of liveness prediction is 97%. | High efficiency of single granulation. The modeling accuracy and stability are good. | The detection efficiency will be affected by the wheel speed or angle. |
| [53] | White radish | Pre-dispersive near-infrared light technology | The accuracy of grading is 80.56%. | Pre-dispersive NIR light technology is used. New detection method, low cost. | It is only applicable when the internal mass changes are small. |
| [54] | Ioquat | Hyperspectral technology. RF. Builds models with multiple colors | The accuracy is 100%. | Multiple model methods are compared. High accuracy. | No other defects were identified. |
| [55] | Black wolfberry | FD, FFT, HT, SG, Normalize and SNV preprocesses. PCA, SPA, and CARS extract wavelengths. LIBSVM, LDA, KNN, RF and NB build the model. Stacking ensemble learning. | The precision is improved from 0.9417 to 0.9833. Fast grading can be achieved by hyperspectral ensemble training. | It can obtain spectral and image information at the same time. and fast. Comparison of multiple methods. | The steps are cumbersome and only suitable for indoor use. |
| [56] | Orange | Hyperspectral technology. PLS-DA and other methods for modeling. | The false positive rate is 0.78%. | It also reduces the false positive rate while reducing the dimension of spectral space. | The effect of thick skin was not considered. |
| [57] | Honey | SPA FCM KNN | It can classify grade 3 fruit accurately, but grades 1 and 2 and grades 4 and 5 are easy to misjudge between each other. | The samples are non-destructive and can capture internal qualities. | It is suitable for grades 1–3, and the recognition accuracy of grades 4 and 5 is low. |
| [58] | Watermelon | Near-infrared reflectance spectroscopy | R2cv = 0.73, RMSECV = 0.39%, R2p = 0.81, RMSEP = 0.30%. | Near-infrared light penetration. | Heavily dependent on optical geometry measurements; further instrument optimization is required. |
| [59] | Jujube | Hyperspectral technology is combined with VISSA-GWO-SVM model. | The accuracy rate is 91.67%. | The signal-to-noise ratio of the spectrum is improved. It is fast and lossless. | The recognition accuracy is low. |
| [60] | Eggplant | Hyperspectral continuous-projection method. | Rc2 =0.94, Rp2 = 0.90, RMSEC = 0.19, RMSEP = 0.21. The accuracy rate is 96.82%. | The grading accuracy is improved, and the eggplant damage can be effectively graded and evaluated. | The data dependence is strong, and the feature selection will affect its stability. |
| [61] | Potato | Partial least squares regression. OSC-CARS–PLSR | R2 is 0.9606 and 0.8925. RMSE is 0.070% and 0.1385%. | The prediction accuracy and stability are improved. | It increases the computational complexity and requires the use of more computing resources. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, J.; Zhang, M.; Hu, Y.; Ma, W.; Tian, Z.; Liao, H.; Chen, J.; Yang, Y. From Outside to Inside: The Subtle Probing of Globular Fruits and Solanaceous Vegetables Using Machine Vision and Near-Infrared Methods. Agronomy 2024, 14, 2395. https://doi.org/10.3390/agronomy14102395
Lu J, Zhang M, Hu Y, Ma W, Tian Z, Liao H, Chen J, Yang Y. From Outside to Inside: The Subtle Probing of Globular Fruits and Solanaceous Vegetables Using Machine Vision and Near-Infrared Methods. Agronomy. 2024; 14(10):2395. https://doi.org/10.3390/agronomy14102395
Chicago/Turabian StyleLu, Junhua, Mei Zhang, Yongsong Hu, Wei Ma, Zhiwei Tian, Hongsen Liao, Jiawei Chen, and Yuxin Yang. 2024. "From Outside to Inside: The Subtle Probing of Globular Fruits and Solanaceous Vegetables Using Machine Vision and Near-Infrared Methods" Agronomy 14, no. 10: 2395. https://doi.org/10.3390/agronomy14102395
APA StyleLu, J., Zhang, M., Hu, Y., Ma, W., Tian, Z., Liao, H., Chen, J., & Yang, Y. (2024). From Outside to Inside: The Subtle Probing of Globular Fruits and Solanaceous Vegetables Using Machine Vision and Near-Infrared Methods. Agronomy, 14(10), 2395. https://doi.org/10.3390/agronomy14102395