Metric Map Generation for Autonomous Field Operations

 , ,
, ,  ,
,  and
and 
Abstract
1. Introduction
2. Methods
2.1. Geometric Primitives
2.2. Geometric Operators
2.3. Metric Map Generaiton
2.3.1. Inputs
- The boundary of the field area and the boundaries of the in-field obstacles, which are represented by a polygon, .
- The number of headland passes () for the main field and each obstacle.
- The line (), which is used as reference line for generation of the parallel field-work tracks. can be either a straight-line segment or a polyline.
- The operating width (). This is the effective operating width of the implement.
2.3.2. Metric Map Entities
2.3.3. Generation of Headland Passes and Headland Areas
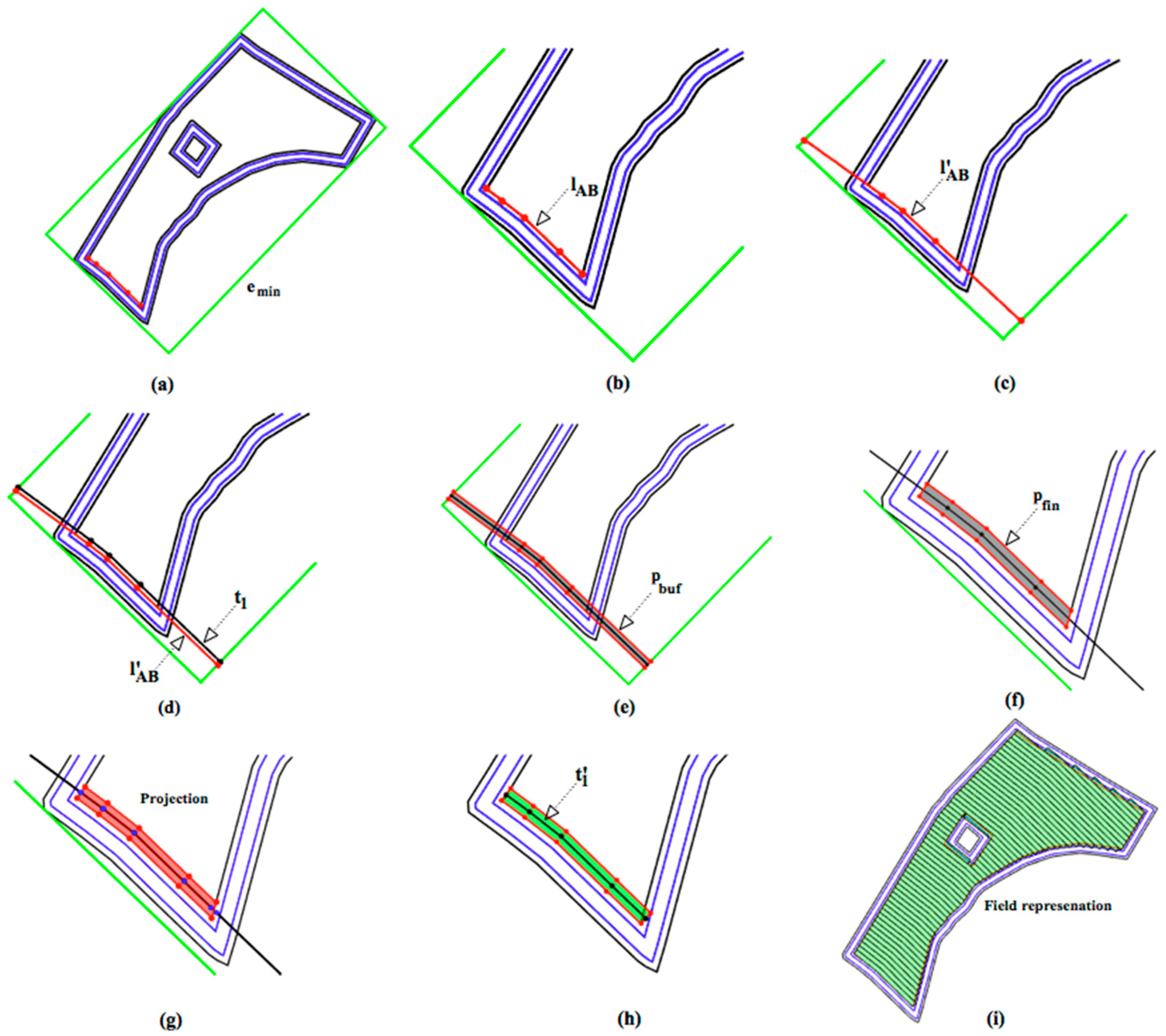
2.3.4. Tracks and Rows Generation
- Next, the boolean intersect operator is applied to check whether the intersects with the obstacles. Following this, there are three potential cases, as illustrated in Figure 8c: Case 1: if is not intersected with any obstacle, then remains unchanged; Case 2: if only partially intersects with obstacles, then the subtraction operator is employed to obtain the subtracted area; and Case 3: if crosses through an obstacle, then the subtraction operator divides the polygon into sub-polygons. Other cases such as a partially intersects one obstacle and crosses through another obstacle are considered as the case of the combination of basic cases 2 and 3.
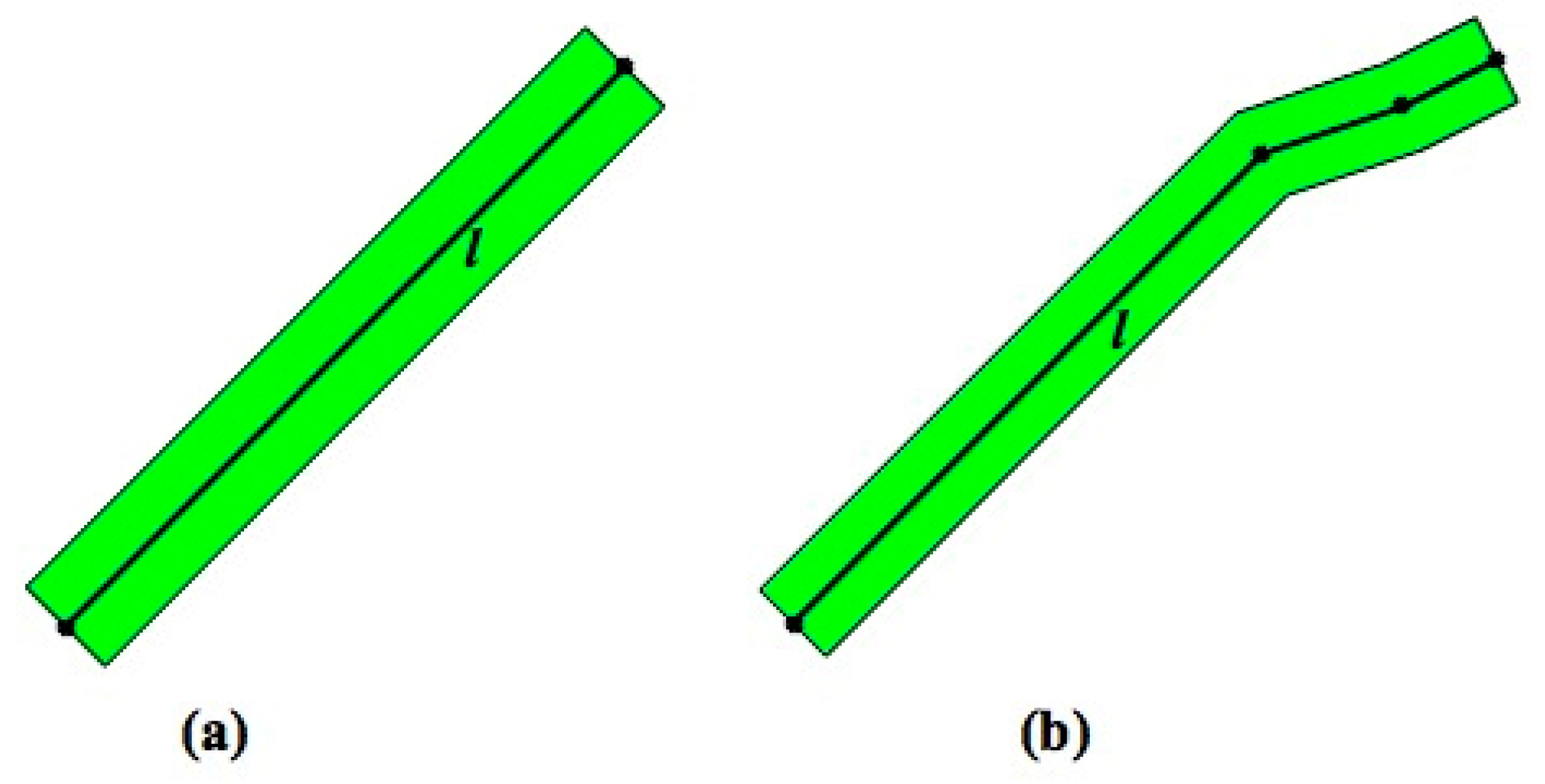
- After the subtraction operation has been performed, each area is enclosed by a ring with multiple points denoted as a set (red points in Figure 8c). To obtain the final track, , first, points in the set are projected to the initial track by the projection operator to acquire the projection points set . Afterwards, the final track (black dotted lines in Figure 9a) is created using the union operator . In addition, the row of the final track (green area in Figure 9b) is generated by employing the buffer operator .
| Algorithm 1. Pseudo-code for the generation of straight tracks and corresponding rows. |
| For each initial track t do |
| # Create a buffer around a initial track t |
| # Obtain the intersection between and field inner boundary area |
| If ) == false |
| ; |
| Else |
| ; # Find the subtracted area between and inner boundary of obstacle . |
| End |
| For each do |
| Get a set of projection points to , {m′} ← , is the set of points that constitute ; |
| Final track ← ; |
| Row of final track ; |
| End |
| End |
| Algorithm 2. Pseudo-code for generation of curved tracks with corresponding rows. |
| While until no track intersects with |
| If |
| Extend to intersect with ; |
| = |
| # Create a buffer around ; |
| Else |
| = Extend to intersect with ; |
| # Create a buffer around ; |
| End |
| # Obtain the intersection between and field inner boundary area ; |
| If ) == false |
| ; |
| Else |
| ; # Find the subtracted area between and inner boundary of obstacle . |
| End |
| Get set of projection points {m′} ← , is the set of points that constitute ; |
| Final track ; |
| Row of final track ; |
| ; |
| End |
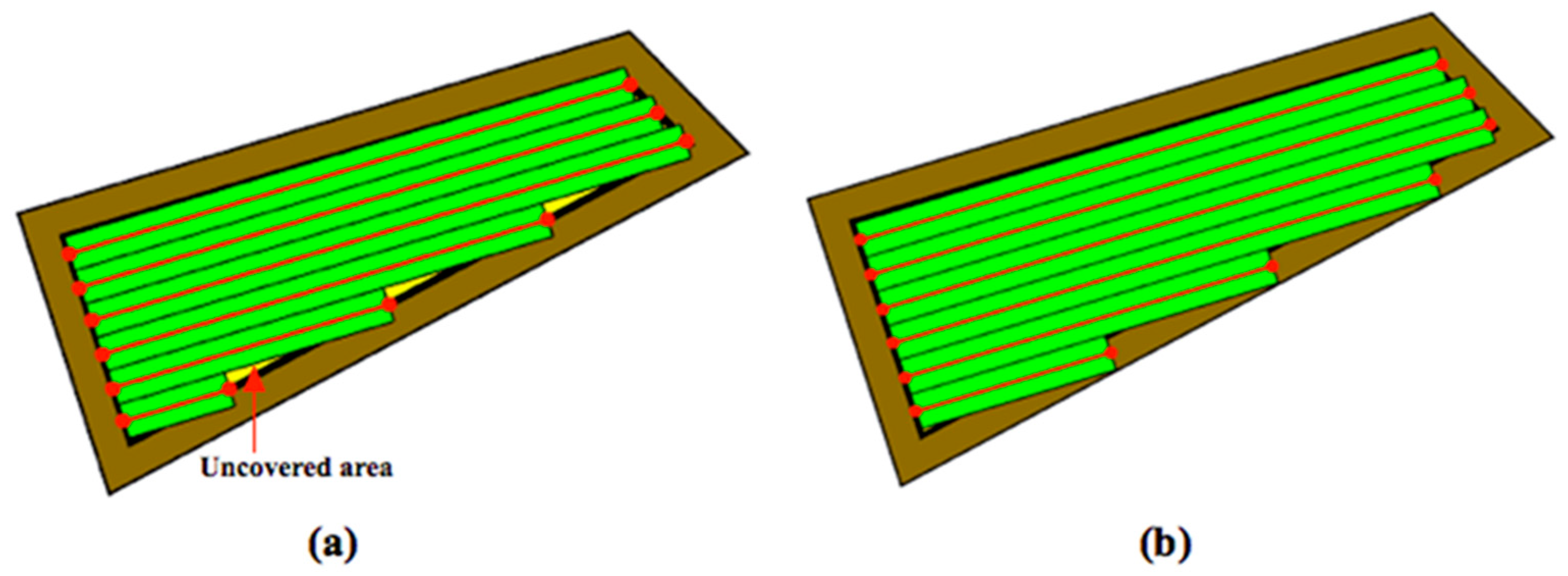
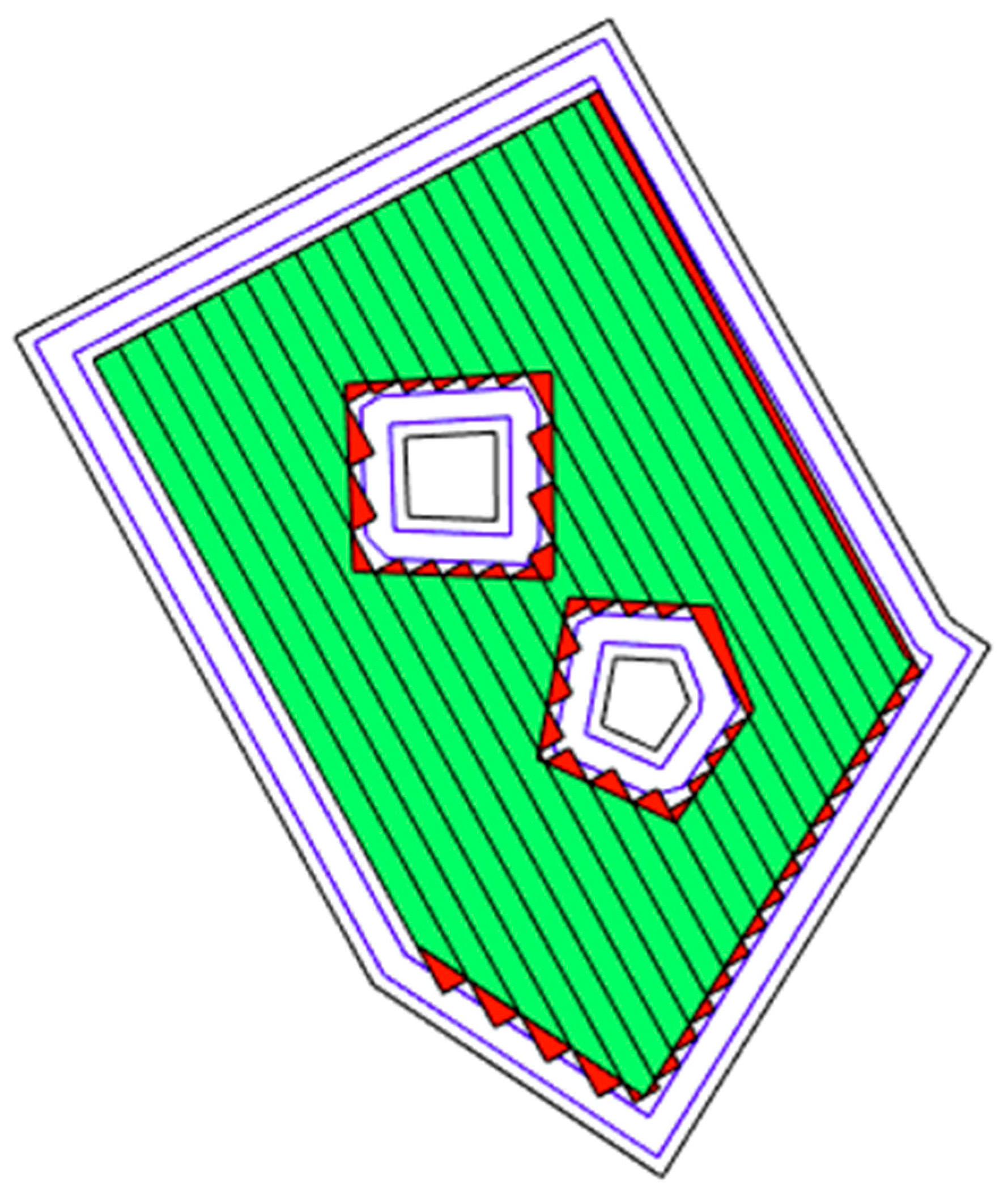
2.3.5. Overlapped Area Quantification
3. Implementation and Results
4. Discussion
- Not all information about field shapes is often available, so the operator has to drive around the field and obstacles boundaries to acquire the path coordinates, and so the map generation process has to take place on-site.
- The field metric map should be generated based on the effective working width instead of the specified working width which in many cases the operator must adjust to field conditions.
- Factors also such as soil condition in terms of moisture content also affects field shapes and thus affecting the field representation scheme. That might be the case, when, for example, a water area inside the field resulting from rain constitutes an operational obstacle for the proposed method and would require a new field representation to be generated in real-time, on site, for the remainder of the field operation.
- Regarding infield obstacles, the proposed method does not handle cases such as two obstacles in close proximity. These types of obstacles, from the operational point of view, should be considered as one obstacle. Furthermore, cases of small obstacles (e.g., trees, electricity pylons, etc.) that cause a local deviation from the designed track are not taken into account. The categorization of the obstacles depending on the driving direction, working width, the shape of field, size and location of obstacle [18] is an important step in the map generation since it affects the accuracy and feasibility of the generated field representation scheme.
- In the case of curved tracks, each track consists of sequentially connected line segments. There are cases where it is not feasible for an agricultural machine to perform a sharp turn between two line segments due to operational limitations on the maximum turning curvature. Therefore, there is the need for the implementation of curved polyline smoothing algorithms to generate an easier steerable path for agricultural machines [12].
- As part of the tool, the machine operator has to set the value of the number of headland passes manually for generation of the required headland space. It might be difficult for the user to determine an appropriate value due to the fact that the headland space depends on a number of factors such as field shapes, field condition, machine’s kinematic features and so on. Therefore, an algorithm or model should be developed for this tool to improve the reliability of the field representation.
- This tool needs further elaboration so that the user can interactively divide the field into subfields, where each subfield can have its own driving direction.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sørensen, C.G.; Pesonen, L.; Bochtis, D.D.; Vougioukas, S.G.; Suomi, P. Functional requirements for a future farm management information system. Comput. Electron. Agric. 2011, 76, 266–276. [Google Scholar] [CrossRef]
- Angelopoulou, T.; Tziolas, N.; Balafoutis, A.; Zalidis, G.; Bochtis, D. Remote Sensing Techniques for Soil Organic Carbon Estimation: A Review. Remote Sens. 2019, 11, 676. [Google Scholar] [CrossRef]
- Freidenreich, A.; Barraza, G.; Jayachandran, K.; Khoddamzadeh, A.A. Precision Agriculture Application for Sustainable Nitrogen Management of Justicia brandegeana Using Optical Sensor Technology. Agriculture 2019, 9, 98. [Google Scholar] [CrossRef]
- Liakos, K.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine Learning in Agriculture: A Review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef] [PubMed]
- Marino, S.; Alvino, A. Detection of Spatial and Temporal Variability of Wheat Cultivars by High-Resolution Vegetation Indices. Agronomy 2019, 9, 226. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G.; Vougioukas, S.G. Path planning for in-field navigation-aiding of service units. Comput. Electron. Agric. 2010, 74, 80–90. [Google Scholar] [CrossRef]
- Jensen, M.A.F.; Bochtis, D.; Sorensen, C.G.; Blas, M.R.; Lykkegaard, K.L. In-field and inter-field path planning for agricultural transport units. Comput. Ind. Eng. 2012, 63, 1054–1061. [Google Scholar] [CrossRef]
- Bochtis, D.; Griepentrog, H.W.; Vougioukas, S.; Busato, P.; Berruto, R.; Zhou, K. Route planning for orchard operations. Comput. Electron. Agric. 2015, 113, 51–60. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Vougioukas, S.G. Minimising the non-working distance travelled by machines operating in a headland field pattern. Biosyst. Eng. 2008, 101, 1–12. [Google Scholar] [CrossRef]
- Conesa-Muñoz, J.; Bengochea-Guevara, J.M.; Andujar, D.; Ribeiro, A. Route planning for agricultural tasks: A general approach for fleets of autonomous vehicles in site-specific herbicide applications. Comput. Electron. Agric. 2016, 127, 204–220. [Google Scholar] [CrossRef]
- Hameed, I.A.; Bochtis, D.D.; Sorensen, C.G. Driving angle and track sequence optimization for operational path planning using genetic algorithms. Appl. Eng. Agric. 2011, 27, 1077–1086. [Google Scholar] [CrossRef]
- Spekken, M.; de Bruin, S.; Molin, J.P.; Sparovek, G. Planning machine paths and row crop patterns on steep surfaces to minimize soil erosion. Comput. Electron. Agric. 2016, 124, 194–210. [Google Scholar] [CrossRef]
- Zhou, K.; Bochtis, D. Route Planning For Capacitated Agricultural Machines Based On Ant Colony Algorithms. In Proceedings of the 7th International Conference on Information and Communication Technologies in Agriculture, Food and Environment, Kavala, Greece, 17–20 September 2015; pp. 163–173. [Google Scholar]
- Edwards, G.; Jensen, M.A.F.; Bochtis, D.D. Coverage planning for capacitated field operations under spatial variability. Int. J. Sustain. Agric. Manag. Inform. 2015, 1, 120–129. [Google Scholar] [CrossRef]
- Jin, J.; Tang, L. Coverage path planning on three-dimensional terrain for arable farming. J. Field Robot. 2011, 28, 424–440. [Google Scholar] [CrossRef]
- Jin, J.; Tang, L. Optimal coverage path planning for arable farming on 2D surfaces. Trans. ASAE 2010, 53, 283–295. [Google Scholar] [CrossRef]
- Oksanen, T.; Visala, A. Coverage path planning algorithms for agricultural field machines. J. Field Robot. 2009, 26, 651–668. [Google Scholar] [CrossRef]
- Zhou, K.; Leck Jensen, A.; Sørensen, C.G.; Busato, P.; Bothtis, D.D. Agricultural operations planning in fields with multiple obstacle areas. Comput. Electron. Agric. 2014, 109, 12–22. [Google Scholar] [CrossRef]
- Palmer, R.J.; Wild, D.; Runtz, K. Improving the Efficiency of Field Operations. Biosyst. Eng. 2003, 84, 283–288. [Google Scholar] [CrossRef]
- Taïx, M.; Souères, P.; Frayssinet, H.; Cordesses, L. Path planning for complete coverage with agricultural machines. Springer Tracts Adv. Robot. 2006, 24, 549–558. [Google Scholar]
- Oksanen, T.; Visala, A. Path Planning Algorithms for Agricultural Machines. Agric. Eng. Int. CIGR J. Sci. Res. Dev. 2007. [Google Scholar]
- Hameed, I.A.; Bochtis, D.D.; Sørensen, C.G.; Nøremark, M. Automated generation of guidance lines for operational field planning. Biosyst. Eng. 2010, 107, 294–306. [Google Scholar] [CrossRef]
- Hameed, I.A.; La Cour-Harbo, A.; Osen, O.L. Side-to-side 3D coverage path planning approach for agricultural robots to minimize skip/overlap areas between swaths. Rob. Auton. Syst. 2016, 76, 36–45. [Google Scholar] [CrossRef]
- Luck, J.D.; Pitla, S.K.; Shearer, S.A.; Mueller, T.G.; Dillon, C.R.; Fulton, J.P.; Higgins, S.F. Potential for pesticide and nutrient savings via map-based automatic boom section control of spray nozzles. Comput. Electron. Agric. 2010, 70, 19–26. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Geometries | Intersection | Subtraction |
|---|---|---|
 |  |  |
 |  |  |
| Polygon Offset | Polyline Offset | Line Offset |
|---|---|---|
 |  |  |
| Field ID | Area (ha) | Shape and Reference Line | Computation Time (s) | Track Type | ||
|---|---|---|---|---|---|---|
| = 2 m | = 4 m | = 6 m | ||||
| 1 | 10.27 |  | 0.98 | 0.73 | 0.60 | Straight |
| 2 | 22.78 |  | 9.63 | 5.42 | 2.59 | Curved |
| 3 | 53.06 |  | 19.62 | 6.41 | 2.72 | Curved |
| 4 | 37.27 |  | 14.22 | 4.83 | 2.86 | Curved |
| 5 | 15.56 |  | 4.82 | 2.12 | 0.63 | Curved |
| 6 | 63.27 |  | 2.01 | 1.28 | 1.12 | Straight |
| 7 | 30.27 |  | 24.51 | 6.81 | 3.13 | Curved |
| 8 | 37.41 |  | 1.78 | 1.22 | 1.01 | Straight |
| 9 | 27.58 |  | 18.2 | 6.22 | 3.62 | Curved |
| 10 | 34.51 |  | 1.58 | 0.97 | 0.73 | Straight |
| 11 | 74.98 |  | 1.57 | 0.94 | 0.27 | Straight |
| 12 | 36.3 |  | 1.95 | 1.23 | 1.01 | Straight |
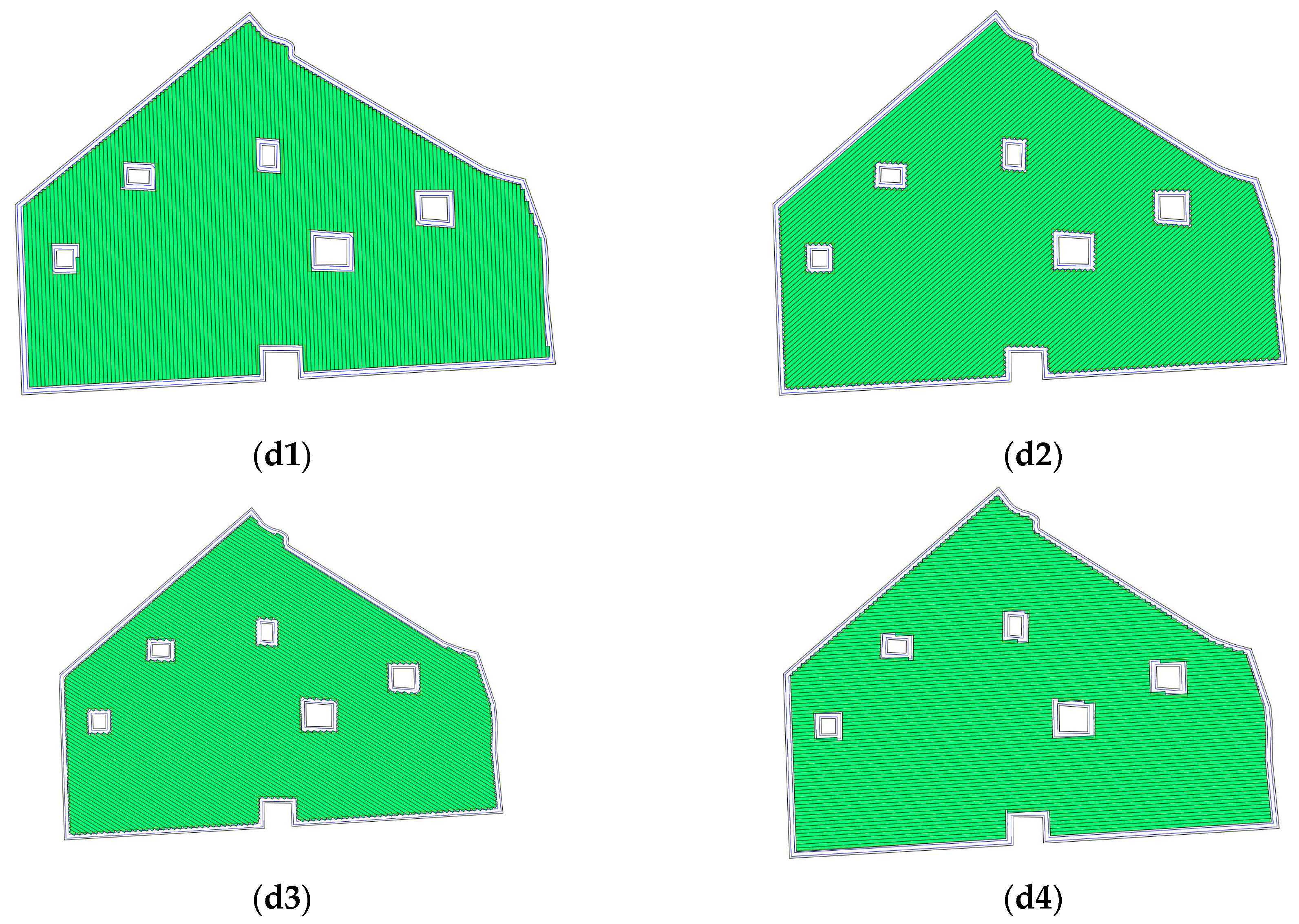
| = 4 m | = 6 m | |||||||
|---|---|---|---|---|---|---|---|---|
| d1 | d2 | d3 | d4 | d1 | d2 | d3 | d4 | |
| Total length of tracks (m) | 80,441 | 80,649 | 80,787 | 80,541 | 51,652 | 51,799 | 51,967 | 51,655 |
| Number of tracks | 260 | 272 | 262 | 216 | 176 | 184 | 180 | 149 |
| Overlapped area (ha) | 0.28 | 0.37 | 0.42 | 0.32 | 0.48 | 0.57 | 0.67 | 0.49 |
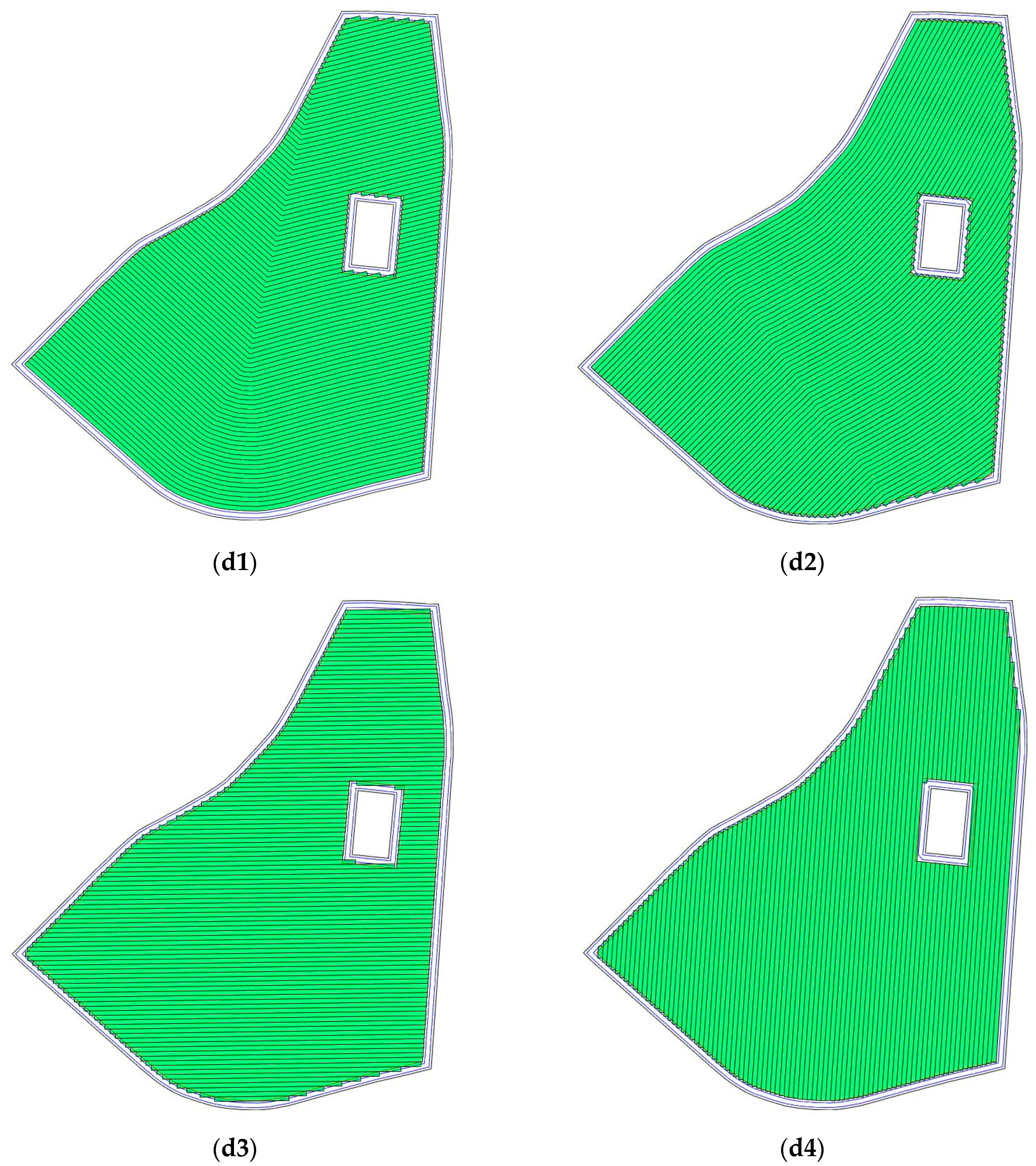
| w = 4 m | w = 6 m | |||||||
|---|---|---|---|---|---|---|---|---|
| d1 Curved | d2 Curved | d3 Straight | d4 Straight | d1 Curved | d2 Curved | d3 straight | d4 Straight | |
| Total length of tracks (m) | 52,027 | 51,797 | 52,080 | 52,068 | 33,350 | 33,131 | 33,358 | 33,355 |
| Number of tracks | 137 | 178 | 189 | 99 | 91 | 119 | 125 | 99 |
| Overlapped area (ha) | 0.20 | 0.11 | 0.23 | 0.33 | 0.22 | 0.18 | 0.34 | 0.33 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, K.; Jensen, A.L.; Bochtis, D.; Nørremark, M.; Kateris, D.; Sørensen, C.G. Metric Map Generation for Autonomous Field Operations. Agronomy 2020, 10, 83. https://doi.org/10.3390/agronomy10010083
Zhou K, Jensen AL, Bochtis D, Nørremark M, Kateris D, Sørensen CG. Metric Map Generation for Autonomous Field Operations. Agronomy. 2020; 10(1):83. https://doi.org/10.3390/agronomy10010083
Chicago/Turabian StyleZhou, Kun, Allan Leck Jensen, Dionysis Bochtis, Michael Nørremark, Dimitrios Kateris, and Claus Grøn Sørensen. 2020. "Metric Map Generation for Autonomous Field Operations" Agronomy 10, no. 1: 83. https://doi.org/10.3390/agronomy10010083
APA StyleZhou, K., Jensen, A. L., Bochtis, D., Nørremark, M., Kateris, D., & Sørensen, C. G. (2020). Metric Map Generation for Autonomous Field Operations. Agronomy, 10(1), 83. https://doi.org/10.3390/agronomy10010083