Modeling the Viscoelastic Hysteresis of Dielectric Elastomer Actuators with a Modified Rate-Dependent Prandtl–Ishlinskii Model

Abstract
1. Introduction
2. System Description
2.1. Fabrication of the Planar DEA
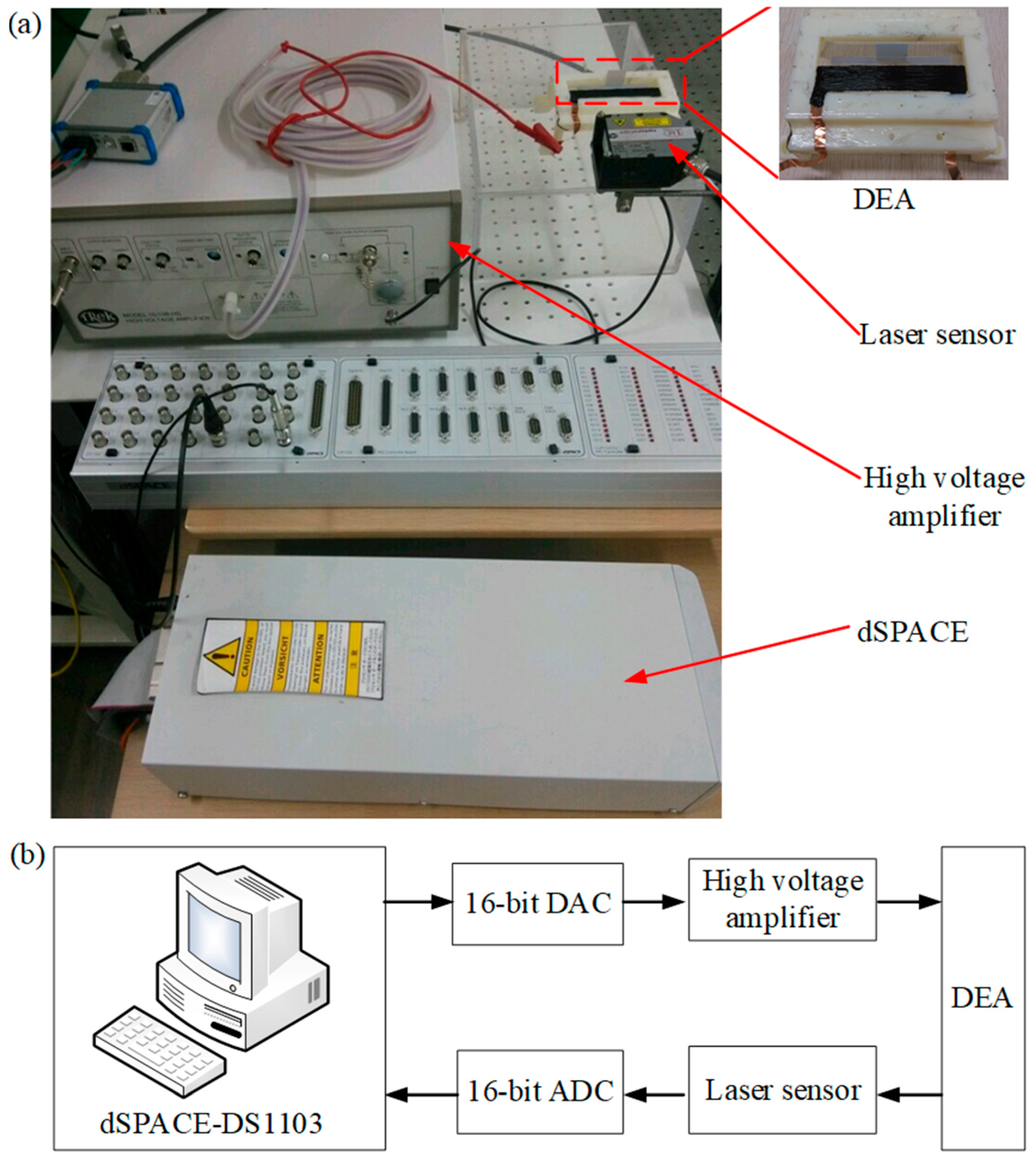
2.2. Experimental Setup
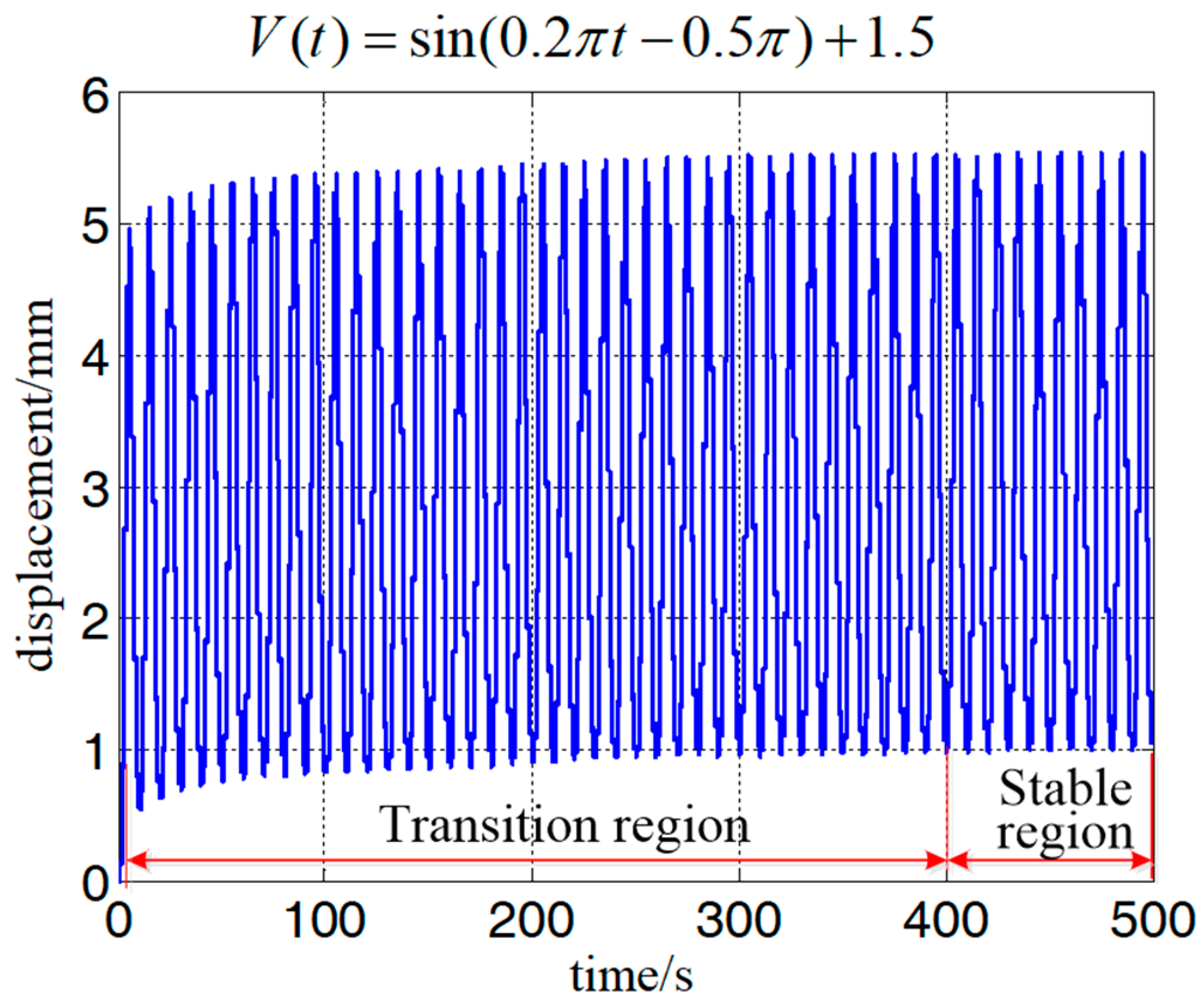
2.3. Experimental Phenomena
- (i)
- The viscoelastic hysteresis loops are asymmetric.
- (ii)
- The widths of the viscoelastic hysteresis loops are rate-dependent. When the frequency of the input voltage increased from 0.02 to 1 Hz, the width of the viscoelastic hysteresis loop increased by 21.80%.
- (iii)
- The peak-to-peak displacements of the viscoelastic hysteresis loops are rate-dependent. When the frequency of the exciting voltage increased from 0.02 to 1 Hz, the peak-to-peak displacement of the viscoelastic hysteresis loop decreased by 27.26%.
3. Viscoelastic Hysteresis Model
3.1. The Classical P–I Model
3.2. The MRPIM
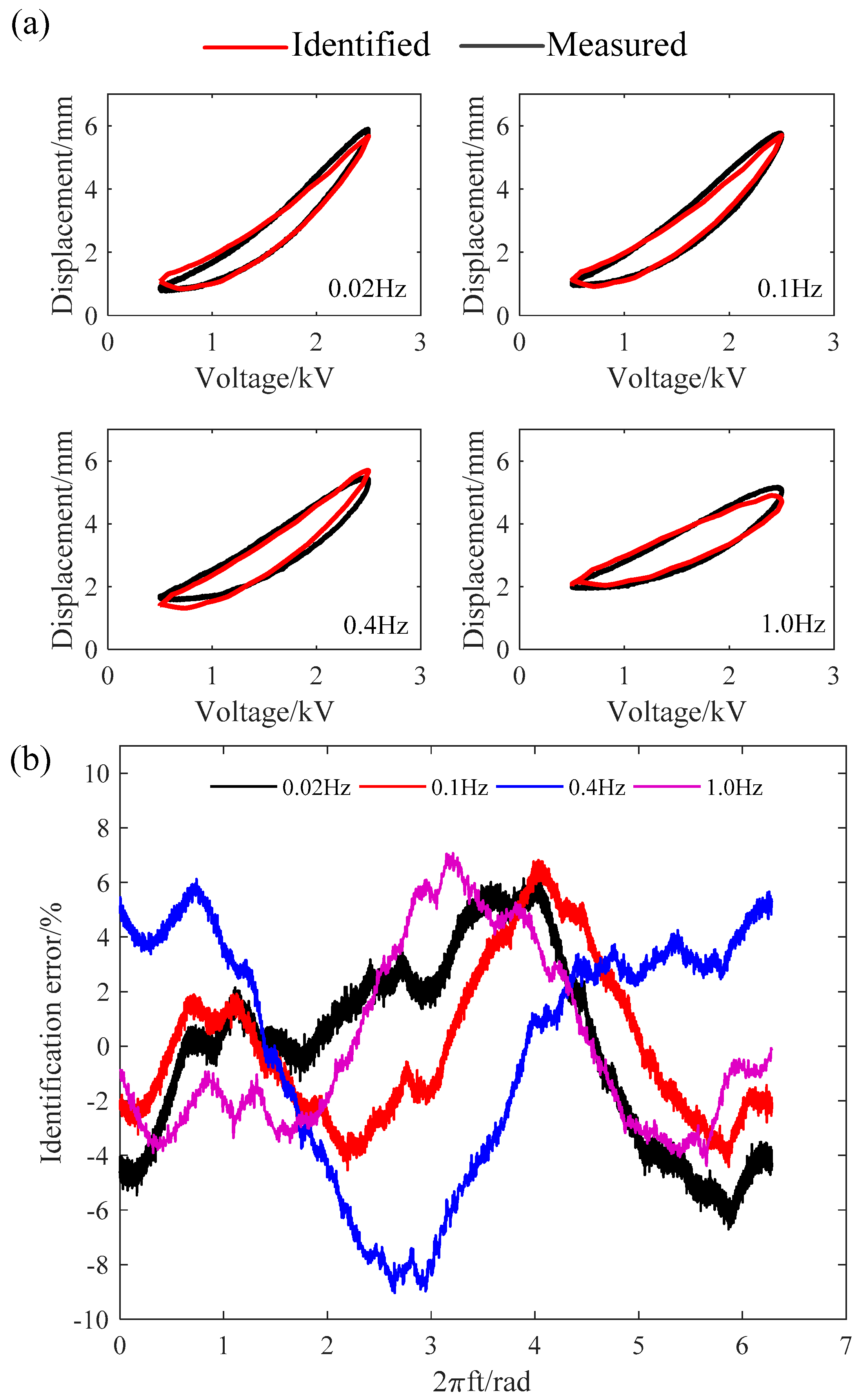
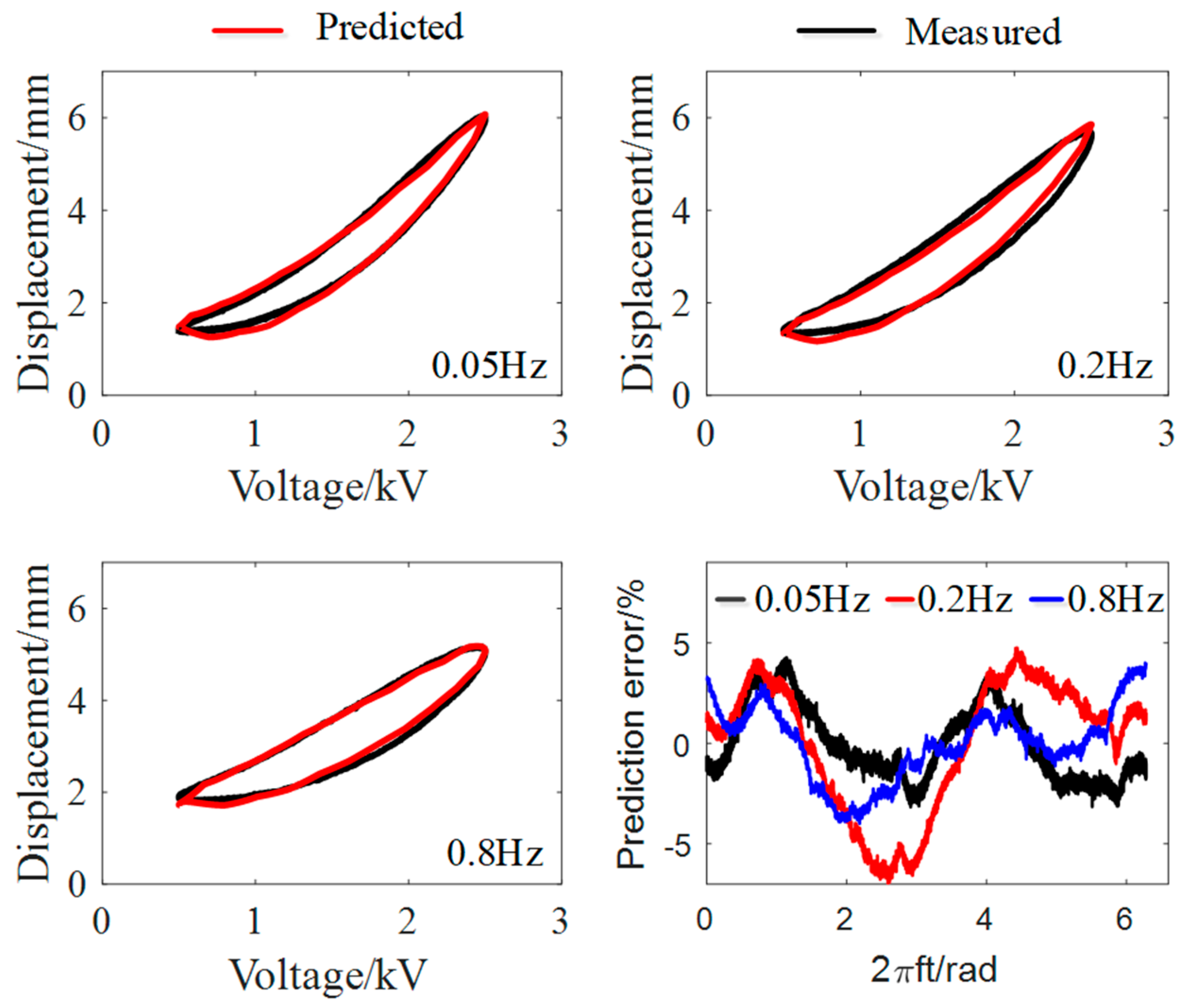
3.3. Identification of the MRPIM
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- O’Halloran, A.; O’Malley, F.; McHugh, P. A review on dielectric elastomer actuators, technology, applications, and challenges. J. Appl. Phys. 2008, 104, 071101. [Google Scholar] [CrossRef]
- Gu, G.; Zhu, J.; Zhu, L.; Zhu, X. A survey on dielectric elastomer actuators for soft robots. Bioinspir. Biomim. 2017, 12, 011003. [Google Scholar] [CrossRef] [PubMed]
- Pelrine, R.; Kornbluh, R.; Pei, Q.; Joseph, J. High-speed electrically actuated elastomers with strain greater than 100%. Science 2000, 287, 836–839. [Google Scholar] [CrossRef] [PubMed]
- Carpi, F.; Salaris, C.; De Rossi, D. Folded dielectric elastomer actuators. Smart. Mater. Struct. 2007, 16, S300–S305. [Google Scholar] [CrossRef]
- O’Brien, B.M.; McKay, T.G.; Gisby, T.A.; Anderson, I.A. Rotating turkeys and self-commutating artificial muscle motors. Appl. Phys. Lett. 2012, 100, 074108. [Google Scholar] [CrossRef]
- Zhao, Y.; Zha, J.; Yin, L.; Gao, Z.; Wen, Y.; Dang, Z.-M. Remarkable electrically actuation performance in advanced acrylic-based dielectric elastomers without pre-strain at very low driving electric field. Polymer 2018. [Google Scholar] [CrossRef]
- Kovacs, G.; Lochmatter, P.; Wissler, M. An arm wrestling robot driven by dielectric elastomer actuators. Smart. Mater. Struct. 2007, 16, S306–S317. [Google Scholar] [CrossRef]
- Xu, L.; Chen, H.; Zou, J.; Dong, W.; Gu, G.; Zhu, L.; Zhu, X. Bio-inspired annelid robot: A dielectric elastomer actuated soft robot. Bioinspir. Biomim. 2017, 12, 025003. [Google Scholar] [CrossRef] [PubMed]
- Pei, Q.; Pelrine, R.; Stanford, S.; Kornbluh, R.D.; Rosenthal, M.S.; Meijer, K.; Full, R.J. Multifunctional electroelastomer rolls and their application for biomimetic walking robots. In SPIE’s 9th Annual International Symposium on Smart Structures and Materials; International Society for Optics and Photonics: San Diego, CA, USA, 2002; pp. 246–253. [Google Scholar]
- Li, T.; Li, G.; Liang, Y.; Cheng, T.; Dai, J.; Yang, X.; Liu, B.; Zeng, Z.; Huang, Z.; Luo, Y. Fast-moving soft electronic fish. Sci. Adv. 2017, 3, e1602045. [Google Scholar] [CrossRef] [PubMed]
- Gu, G.; Gupta, U.; Zhu, J.; Zhu, L.; Zhu, X. Modeling of viscoelastic electromechanical behavior in a soft dielectric elastomer actuator. IEEE Trans. Robot. 2017, 33, 1263–1271. [Google Scholar] [CrossRef]
- Hong, W. Modeling viscoelastic dielectrics. J. Mech. Phys. Solids 2011, 59, 637–650. [Google Scholar] [CrossRef]
- Wissler, M.; Mazza, E. Mechanical behavior of an acrylic elastomer used in dielectric elastomer actuators. Sens. Actuators A Phys. 2007, 134, 494–504. [Google Scholar] [CrossRef]
- Zou, J.; Gu, G.; Zhu, L. Open-loop control of creep and vibration in dielectric elastomer actuators with phenomenological models. IEEE/ASME Trans. Mechatron. 2016, 22, 51–58. [Google Scholar] [CrossRef]
- Rizzello, G.; Naso, D.; York, A.; Seelecke, S. Closed loop control of dielectric elastomer actuators based on self-sensing displacement feedback. Smart. Mater. Struct. 2016, 25, 035034. [Google Scholar] [CrossRef]
- Brokate, M.; Sprekels, J. Hysteresis and Phase Transitions; Springer: New York, NY, USA, 1996. [Google Scholar]
- Mayergoyz, I.D. Mathematical Models of Hysteresis and Their Applications; Elsevier Science Inc., Academic Press: New York, NY, USA, 2003. [Google Scholar]
- Janaideh, M.A.; Rakheja, S.; Su, C.Y. An Analytical Generalized Prandtl-Ishlinskii Model Inversion for Hysteresis Compensation in Micropositioning Control. IEEE/ASME Trans. Mechatron. 2011, 16, 734–744. [Google Scholar] [CrossRef]
- Saleeb, A.F.; Natsheh, S.H.; Owusu-Danquah, J.S. A multi-mechanism model for large-strain thermomechanical behavior of polyurethane shape memory polymer. Polymer 2017, 130, 230–241. [Google Scholar] [CrossRef]
- Lei, M.; Yu, K.; Lu, H.; Qi, H.J. Influence of structural relaxation on thermomechanical and shape memory performances of amorphous polymers. Polymer 2017, 109, 216–228. [Google Scholar] [CrossRef]
- Belyaeva, I.A.; Kramarenko, E.Y.; Shamonin, M. Magnetodielectric effect in magnetoactive elastomers: Transient response and hysteresis. Polymer 2017, 127, 119–128. [Google Scholar] [CrossRef]
- Gu, G.; Zhu, L.; Su, C. Modeling and compensation of asymmetric hysteresis nonlinearity for piezoceramic actuators with a modified Prandtl–Ishlinskii model. IEEE Trans. Ind. Electron. 2014, 61, 1583–1595. [Google Scholar] [CrossRef]
- York, A.; Dunn, J.; Seelecke, S. Experimental characterization of the hysteretic and rate-dependent electromechanical behavior of dielectric electro-active polymer actuators. Smart. Mater. Struct. 2010, 19, 094014. [Google Scholar] [CrossRef]
- Foo, C.C.; Cai, S.; Koh, S.J.A.; Bauer, S.; Suo, Z. Model of dissipative dielectric elastomers. J. Appl. Phys. 2012, 111, 034102. [Google Scholar]
- Zhang, J.; Li, B.; Chen, H.; Pei, Q. Dissipative performance of dielectric elastomers under various voltage waveforms. Soft Matter 2016, 12, 2348–2356. [Google Scholar] [CrossRef] [PubMed]
- Sarban, R.; Lassen, B.; Willatzen, M. Dynamic Electromechanical Modeling of Dielectric Elastomer Actuators With Metallic Electrodes. IEEE/ASME Trans. Mechatron. 2012, 17, 960–967. [Google Scholar] [CrossRef]
- Kollosche, M.; Kofod, G.; Suo, Z.; Zhu, J. Temporal evolution and instability in a viscoelastic dielectric elastomer. J. Mech. Phys. Solids 2015, 76, 47–64. [Google Scholar] [CrossRef]
- Tie, F.; Richard, W.J.; Fei, Y. Elliptical modelling of hysteresis operating characteristics in a dielectric elastomer tubular actuator. Smart Mater. Struct. 2016, 25, 075038. [Google Scholar]
- Zhang, Y.; Wang, K.; Jones, R.W. Characterisation, modelling and hysteresis compensation in a tubular dielectric elasomer actuator. In Proceedings of the 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montréal, QC, Canada, 6–9 July 2010; pp. 884–889. [Google Scholar]
- Rosset, S.; Araromi, O.A.; Shea, H. Maximizing the displacement of compact planar dielectric elastomer actuators. Extreme Mech. Lett. 2015, 3, 72–81. [Google Scholar] [CrossRef]
- Rosset, S.; Araromi, O.; Shea, H. Maximizing strain in miniaturized dielectric elastomer actuators. In SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring; International Society for Optics and Photonics: San Diego, CA, USA, 2015. [Google Scholar]
- Yang, M.; Li, C.; Gu, G.; Zhu, L. A Modified Prandtl-Ishlinskii Model for Rate-dependent Hysteresis Nonlinearity Using m th-power Velocity Damping Mechanism. Int. J. Adv. Robot. Syst. 2014, 11, 163. [Google Scholar] [CrossRef]
- Yang, M.; Gu, G.; Zhu, L. Parameter identification of the generalized Prandtl–Ishlinskii model for piezoelectric actuators using modified particle swarm optimization. Sensor. Actuators A Phys. 2013, 189, 254–265. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (Hz) | |||
|---|---|---|---|
| 1 | 0.02 | 4 | 50,000 |
| 2 | 0.1 | 1 | 10,000 |
| 3 | 0.4 | 4 | 2500 |
| 4 | 1 | 1 | 1000 |
| 1 | −4.3668 | −2.0536 | 0.0254 | 0.0323 | −0.0322 |
| 2 | 0.7119 | 5.5811 | |||
| 3 | −0.7480 | −1.5452 | |||
| 4 | 0.5184 | 0.1641 | |||
| 5 | −0.5119 | ||||
| 6 | 0.3491 | ||||
| 7 | −0.0132 | ||||
| 8 | 0.5967 | ||||
| 9 | 0.3318 | ||||
| 10 | 0.7624 | ||||
| 11 | 2.7350 | ||||
| 12 | 9.9937 | ||||
| 13 | −12.2643 |
| Frequency (Hz) | (%) | (%) |
|---|---|---|
| 0.02 | 6.70 | 3.40 |
| 0.1 | 6.80 | 2.82 |
| 0.4 | 9.03 | 4.50 |
| 1.0 | 7.07 | 3.28 |
| Frequency (Hz) | (%) | (%) |
|---|---|---|
| 0.05 | 4.27 | 1.82 |
| 0.2 | 6.95 | 3.25 |
| 0.8 | 4.01 | 1.85 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, J.; Gu, G. Modeling the Viscoelastic Hysteresis of Dielectric Elastomer Actuators with a Modified Rate-Dependent Prandtl–Ishlinskii Model. Polymers 2018, 10, 525. https://doi.org/10.3390/polym10050525
Zou J, Gu G. Modeling the Viscoelastic Hysteresis of Dielectric Elastomer Actuators with a Modified Rate-Dependent Prandtl–Ishlinskii Model. Polymers. 2018; 10(5):525. https://doi.org/10.3390/polym10050525
Chicago/Turabian StyleZou, Jiang, and Guoying Gu. 2018. "Modeling the Viscoelastic Hysteresis of Dielectric Elastomer Actuators with a Modified Rate-Dependent Prandtl–Ishlinskii Model" Polymers 10, no. 5: 525. https://doi.org/10.3390/polym10050525
APA StyleZou, J., & Gu, G. (2018). Modeling the Viscoelastic Hysteresis of Dielectric Elastomer Actuators with a Modified Rate-Dependent Prandtl–Ishlinskii Model. Polymers, 10(5), 525. https://doi.org/10.3390/polym10050525