
Analysis of Noise-Detection Characteristics of Electric Field Coupling in Quartz Flexible Accelerometer


Abstract
1. Introduction
2. Analysis of Electric Field Coupling in QFA
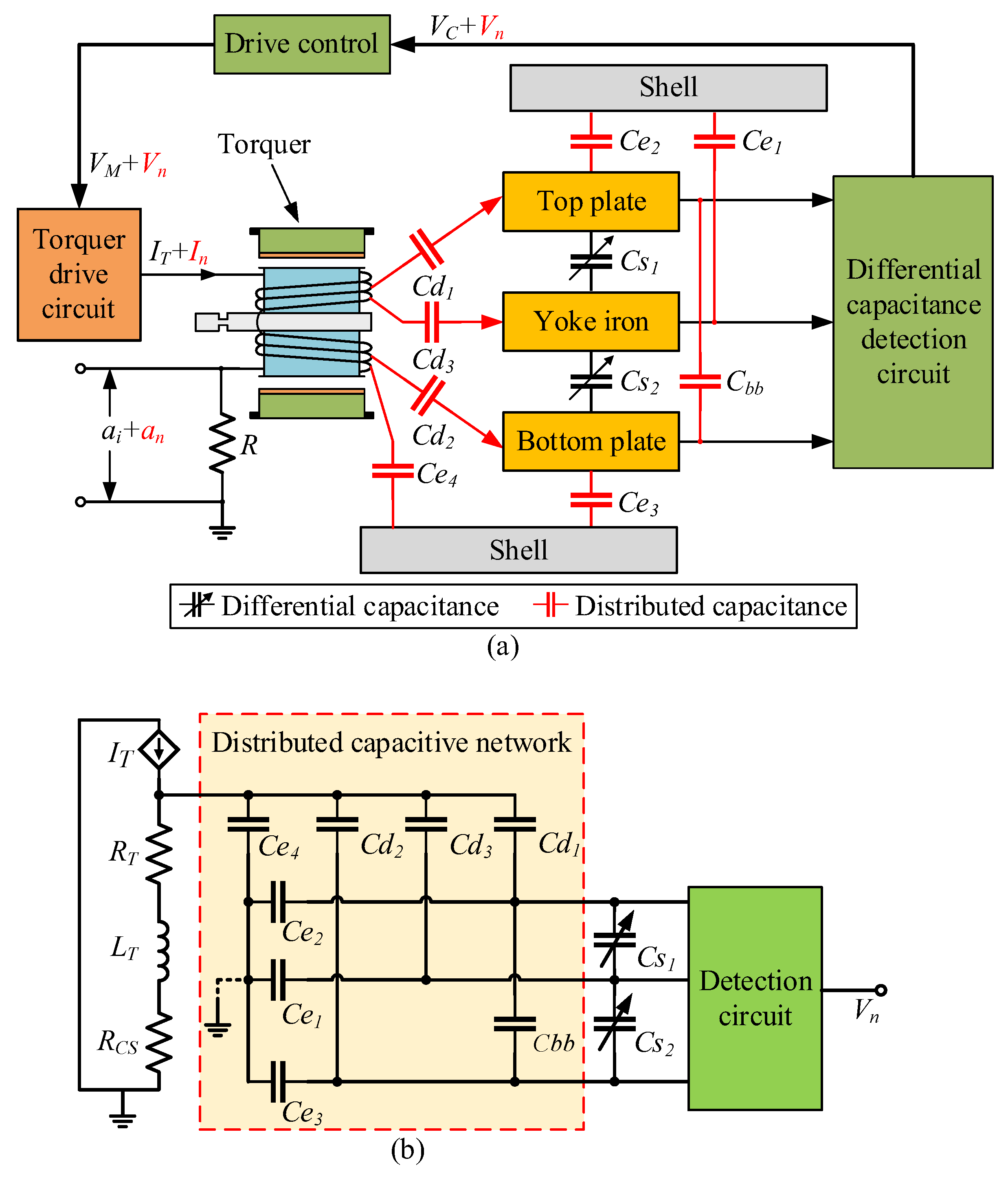
2.1. Mechanism of Electric Field Coupling in QFA
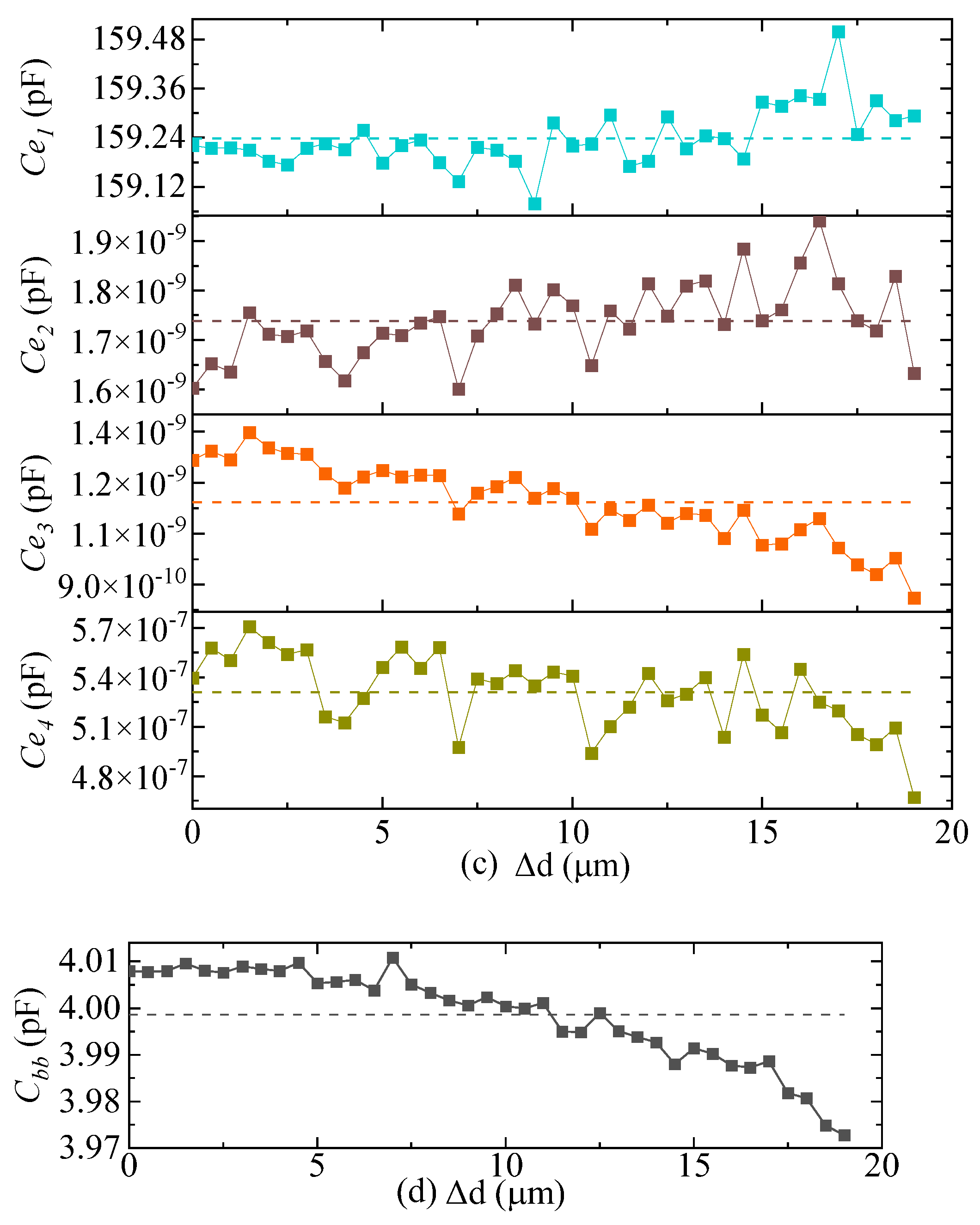
2.2. Simulation of Distributed Capacitance in QFA
3. Analysis of Detection Noise Transfer System Structure
3.1. Detection Noise Transfer System Structure of SCM Detection Circuit
3.2. Detection Noise Transfer System Structure of DCM Detection Circuit
4. Analysis and Experiment in Relation to Detection Noise Characteristics
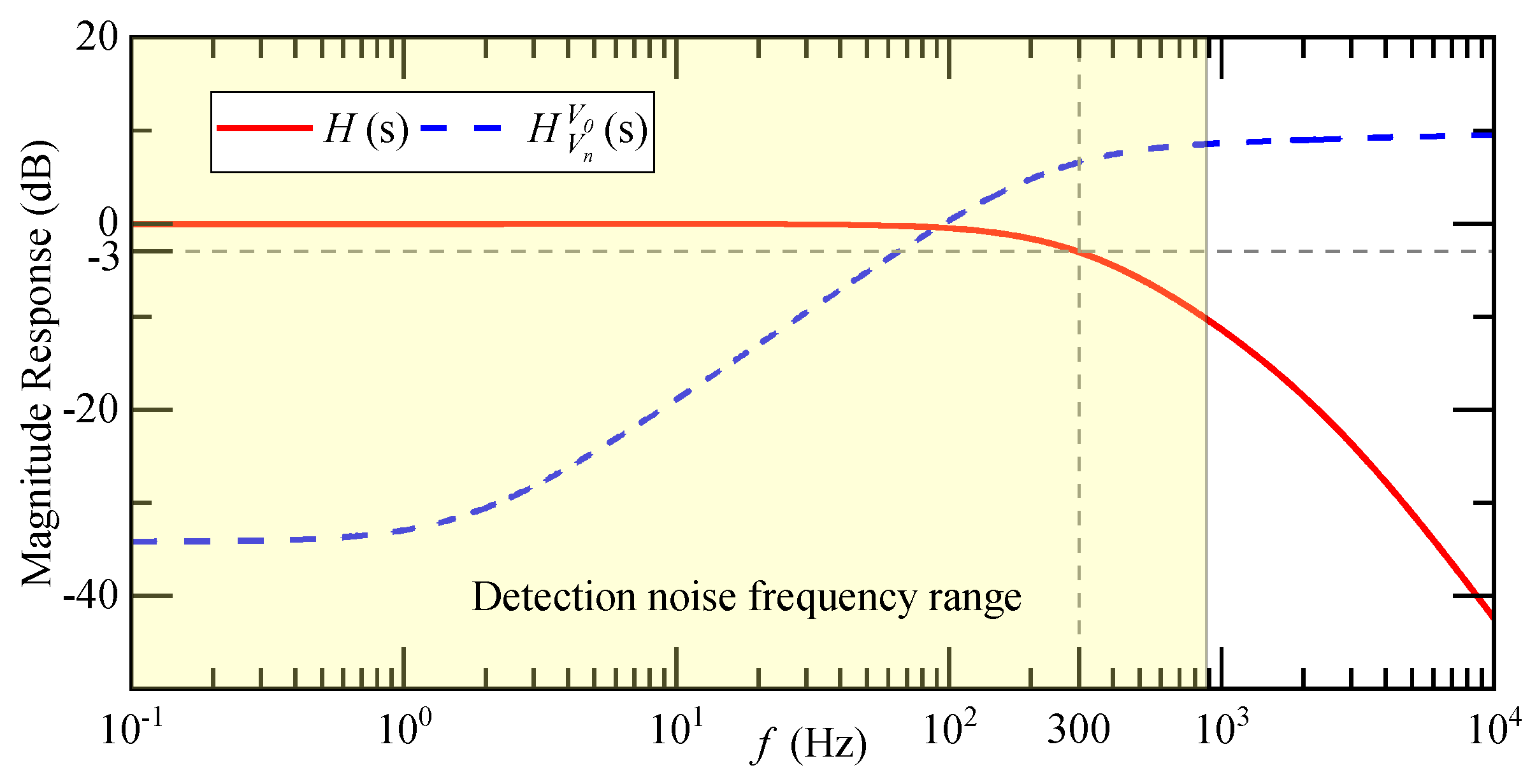
4.1. Analysis of Detection Noise Transfer in The Closed-Loop System of The QFA
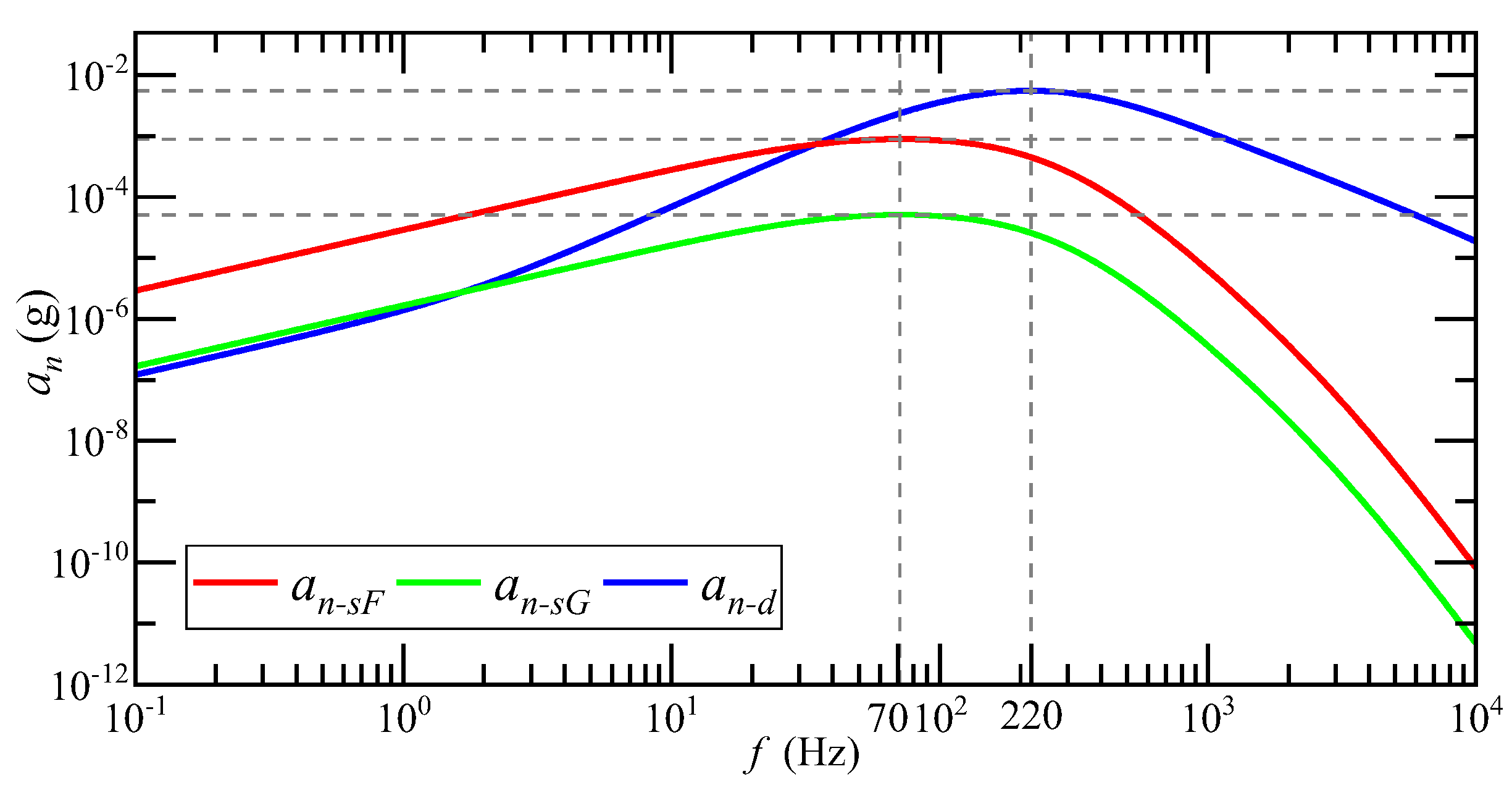
4.2. Analysis of Influencing Factors of Detection Noise
4.2.1. Analysis of Influencing Factors of Detection Noise in SCM Detection Circuit
4.2.2. Analysis of Influencing Factors of Detection Noise in DCM Detection Circuit
4.3. Experiment in Respect of Detection Noise Characteristics
4.3.1. Experiment on the Transfer Characteristics of Noise-Detection
4.3.2. Experiment on Influencing Factors of Detection Noise
5. Suppression Method of Electric Field Coupling Detection Noise
5.1. Optimization Analysis of Carrier Modulation Differential Capacitance Detection Circuit
5.2. Analysis of Suppression Effect of Electric Field Coupling Detection Noise
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Foote, S.A.; Grindeland, D.B. Model QA3000 Q-Flex accelerometer high performance test results. IEEE Aerosp. Electron. Syst. Mag. 1992, 7, 59–67. [Google Scholar] [CrossRef]
- Beitia, J.; Clifford, A.; Fell, C.; Loisel, P. Quartz pendulous accelerometers for navigation and tactical grade systems. In Proceedings of the 2015 DGON Inertial Sensors and Systems Symposium (ISS2015), Karlsruhe, Germany, 22–23 September 2015; pp. 1–20. [Google Scholar]
- Qin, H.; Yu, L. Review of Inertial Accelerometers at Home and Abroad. In Proceedings of the China Academy of Aerospace Electronics Technology Science and Technology Committee 2020 Annual Conference, Beijing, China, 15–16 December 2020; pp. 187–201. [Google Scholar]
- Chang, G.; Zheng, B.; Zhao, Y.; Guang, N.; Zhang, Y. Demand analysis of accelerometer for air defense missile. In Proceedings of the The Third Chinese Conference on Autonomous Navigation (CCAN2019), Chongqing, China, 22–23 November 2019; pp. 1–7. [Google Scholar]
- Guang, Y.; Wang, Y.; Zhao, P.; He, H.; Tang, L. Study of noise model for torquer in quartz flexible accelerometer header. Transducer Microsyst. Technol. 2018, 37, 34–37. [Google Scholar]
- Huang, Y. Analysis and Circuit Optimization of Distributed Capacitance in Differential Capacitance Measurements; Changsha University of Science & Technology: Changsha, China, 2018. [Google Scholar]
- Wang, X.; Song, L.; Ran, L.; Zhang, C.; Xiao, T. Drift Mechanism and Gain Stabilization of Digital Closed-Loop Quartz Flexible Accelerometer in Start-Up Performance. IEEE Sens. J. 2022, 22, 18649–18657. [Google Scholar] [CrossRef]
- Cui, C.; Nie, L.; Li, L.; Wu, M.; Song, X. Improved design for temperature stability of quartz flexible accelerometer. J. Chin. Inert. Technol. 2022, 30, 658–665,673. [Google Scholar]
- Zhang, C.; Wang, X.; Song, L.; Ran, L. Temperature Hysteresis Mechanism and Compensation of Quartz Flexible Accelerometer in Aerial Inertial Navigation System. Sensors 2021, 21, 294. [Google Scholar] [CrossRef] [PubMed]
- Ran, L.; Zhang, C.; Song, L.; Lu, J. The Estimation and Compensation of the Loop-Parameter-Drifting in the Digital Close-Loop Quartz Flexible Accelerometers. IEEE Access 2020, 8, 5678–5687. [Google Scholar] [CrossRef]
- Cao, J.; Wang, M.; Cai, S.; Zhang, K.; Cong, D.; Wu, M. Optimized Design of the SGA-WZ Strapdown Airborne Gravimeter Temperature Control System. Sensors 2015, 15, 29984–29996. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Sun, X.; Huang, T.; Ye, L.; Song, K. Cold Starting Temperature Drift Modeling and Compensation of Micro-Accelerometer Based on High-Order Fourier Transform. Micromachines 2022, 13, 413. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Zhang, C.; Song, L.; Ran, L.; Xiao, T. Temperature compensation for quartz flexible accelerometer based on nonlinear auto-regressive improved model. Meas. Control 2022, 56, 124–132. [Google Scholar] [CrossRef]
- Hou, W.; Liu, X.; Wu, W.; Wang, D. Output Noise Characteristics Analysis of the Quartz Flex Accelerometer. Ship Electron. Eng. 2015, 35, 39–42. [Google Scholar]
- Wu, B.; Huang, T.; Ye, L.; Song, K. Noise shaping mechanism of rebalancing loop for inertial component. J. Zhejiang Univ. (Eng. Sci.) 2020, 54, 1819–1826. [Google Scholar]
- Wen, Y.; He, H.; Tang, L.; Zhao, D.; Wang, Y.; Shang, M.; Liu, W.; Zeng, P. Read-out accuracy analysis and torquer-dirver design of quartz flexible accelerometer. J. Mech. Electr. Eng. 2014, 31, 1035–1039. [Google Scholar]
- Huang, L.; Shao, Z.; Zheng, Y.; Li, L. Digital compensation for I/F converter of accelerometer. J. Chin. Inert. Technol. 2014, 22, 547–551. [Google Scholar]
- Huang, Y.; Wang, S.; Liu, Q.; He, H. Noise model for accelerometer charging/discharging differential capacitance measurement circuit. Transducer Microsyst. Technol. 2019, 38, 53–55. [Google Scholar]
- Ran, L.; Zhang, C.; Song, L.; Gao, S. Signal detection method of digital closed-loop quartz flexible accelerometer based on AC bridge. In Proceedings of the The Third Chinese Conference on Autonomous Navigation (CCAN2019), Chongqing, China, 22–23 November 2019; pp. 15–20. [Google Scholar]
- Chen, B.; Song, L.; Zhang, C. Differential capacitance detection method based on capacitance bridge. Transducer Microsyst. Technol. 2019, 38, 116–119. [Google Scholar]
- Zhang, Z.; Wang, Y.; He, H.; Tang, L. Analysis of Electric Field Coupling inside Quartz Flexible Accelerometer Header. In Proceedings of the 5th Chinese Conference on Autonomous Navigation (CCAN2021), Xiamen, China, 10–11 September 2021; pp. 77–84. [Google Scholar]
- Beitia, J.; Loisel, P.; Fell, C. Miniature accelerometer for High-Dynamic, Precision Guided Systems. In Proceedings of the IEEE International Conference Symposium on Inertial Sensors and Systems, Kauai, HI, USA, 27–30 March 2017; pp. 35–38. [Google Scholar]
- Lu, Y. Inertial Devices. In Inertial Devices; Aerospace Publishing House: Beijing, China, 1993; Volume 2, pp. 23–28. [Google Scholar]
- Lotters, J.C.; Olthuis, W.; Veltink, P.H.; Bergveld, P. A sensitive differential capacitance to voltage converter for sensor applications. IEEE Trans. Instrum. Meas. 1999, 48, 89–96. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| QA3000-30 | AI-Q-2010 | A600 | |
|---|---|---|---|
| Input Range (g) | ±60 | ±60 | ±60 |
| Bias (mg) | 4 | 4 | 4 |
| Bias repeatability (μg) | 40 | 550 | 20 |
| Bias temperature sensitivity (μg/°C) | 15 | 30 | 30 |
| Scale Factor (mA/g) | 1.20~1.46 | 1.20~1.46 | 1.20~1.46 |
| Threshold (μg) | 1 | 1 | 1 |
| Bandwidth (Hz) | 300 | 300 | 1000 |
| Intrinsic Noise (μg RMS) | 1500 | 1500 | 1500 |
| Performance | Value |
|---|---|
| Input range (g) | ±10 |
| Bias (mg) | 5 |
| Bias repeatability (μg) | 30 |
| Bias temperature sensitivity (μg/°C) | 30 |
| Scale factor (mA/g) | 1.00~1.20 |
| Threshold (μg) | 5 |
| Bandwidth (Hz) | 300 |
| Intrinsic noise (μg RMS) | 3000 |
| Size Name | Value (mm) | Size Name | Value (mm) |
|---|---|---|---|
| Shell height | 25.00 | Pendulum reed thickness | 0.72 |
| Shell diameter | 38.20 | Pendulum reed diameter | 17.40 |
| Meter head height | 16.22 | Coating area of pendulum reed | 90.19 (mm2) |
| Meter head diameter | 23.40 | Length of flexible beam | 2.80 |
| Torquer coil height | 2.40 | Width of flexible beam | 3.60 |
| Torquer coil diameter | 10.60 | Thickness of flexible beam | 0.02 |
| Distance between upper and lower yoke iron | 0.02 | Flexible beam spacing | 2.50 |
| Part Name | Material Type | Relative Permittivity |
|---|---|---|
| Shell | 1Cr18Ni9Ti | 1.00 |
| Pendulum reed | JGS1 | 3.83 |
| Coating film | Au | 1.00 |
| Torquer coil | Cu | 1.00 |
| Coil frame | Al2O3 | 9.50 |
| Magnet steel | XGS240/46 | 1.00 |
| Magnet pole piece | 1J50 | 1.00 |
| Compensation ring | 1J38 | 1.00 |
| Yoke iron | 4J36 | 1.00 |
| Bellyband | 4J36 | 1.00 |
| Adhesive tape | 3M8992 | 3.10 |
| Underfill | DG-3S | 2.70 |
| Filling gas | Air | 1.00 |
| Part Name | Static Pole Plate | Torquer Coil | Top Plate | Bottom Plate | Shell |
|---|---|---|---|---|---|
| Voltage (V) | 0.00 | 6.00 | 5.00 | −5.00 | 0.00 |
| Capacitance Label | ||||||
|---|---|---|---|---|---|---|
| Value (pF) | 0.8 | 10.0 | 0.8 | 4.0 | 159.0 | 40.0 |
| Noise Type | Value (μg) |
|---|---|
| Mechanical thermal noise | 1.3 × 10−5 |
| Bias repeatability | 30 |
| Detect circuit noise | 1.53 |
| Electric field coupling detection noise | 41.7 |
| 15.0 | 20.0 | 1.1 | 0.024 | 4.6 |
| 5.0 | 2.0 | 3.4 | 0.071 | 14.8 |
| 15.0 | 2.0 | 0.4 | 0.0079 | 1.6 |
| Equivalent Acceleration of Detection Noise | Value Before Optimization (μg) | Optimized Value (μg) | Attenuation (dB) |
|---|---|---|---|
| average | 10.3 | 1.19 × 10−3 | 78.7 |
| average | 0.2 | 2.47 × 10−5 | 78.2 |
| average | 41.7 | 8.47 × 10−3 | 73.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Zhao, D.; He, H.; Tang, L.; He, Q. Analysis of Noise-Detection Characteristics of Electric Field Coupling in Quartz Flexible Accelerometer. Micromachines 2023, 14, 535. https://doi.org/10.3390/mi14030535
Zhang Z, Zhao D, He H, Tang L, He Q. Analysis of Noise-Detection Characteristics of Electric Field Coupling in Quartz Flexible Accelerometer. Micromachines. 2023; 14(3):535. https://doi.org/10.3390/mi14030535
Chicago/Turabian StyleZhang, Zhigang, Dongxue Zhao, Huiyong He, Lijun Tang, and Qian He. 2023. "Analysis of Noise-Detection Characteristics of Electric Field Coupling in Quartz Flexible Accelerometer" Micromachines 14, no. 3: 535. https://doi.org/10.3390/mi14030535
APA StyleZhang, Z., Zhao, D., He, H., Tang, L., & He, Q. (2023). Analysis of Noise-Detection Characteristics of Electric Field Coupling in Quartz Flexible Accelerometer. Micromachines, 14(3), 535. https://doi.org/10.3390/mi14030535