




Globally vs. Locally Trained Machine Learning Models for Landslide Detection: A Case Study of a Glacial Landscape
 ,
,
Abstract
1. Introduction
- How do globally pre-trained machine learning models for landslide detection perform in a glacial landscape?
- Which locally-trained model and input data combination gives the best results?
- Which elements of the investigated models could be implemented in an operational national landslide detection system?
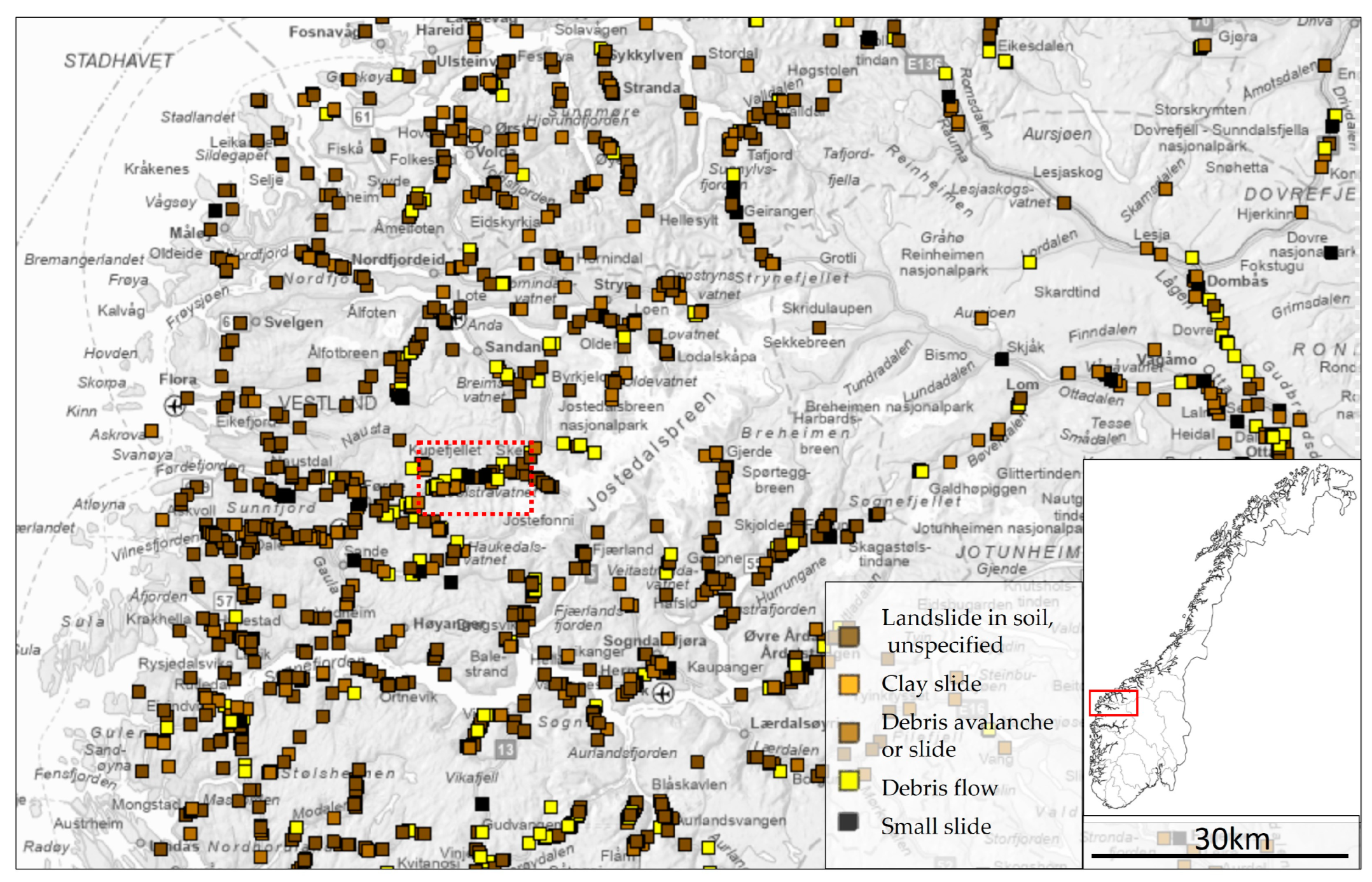
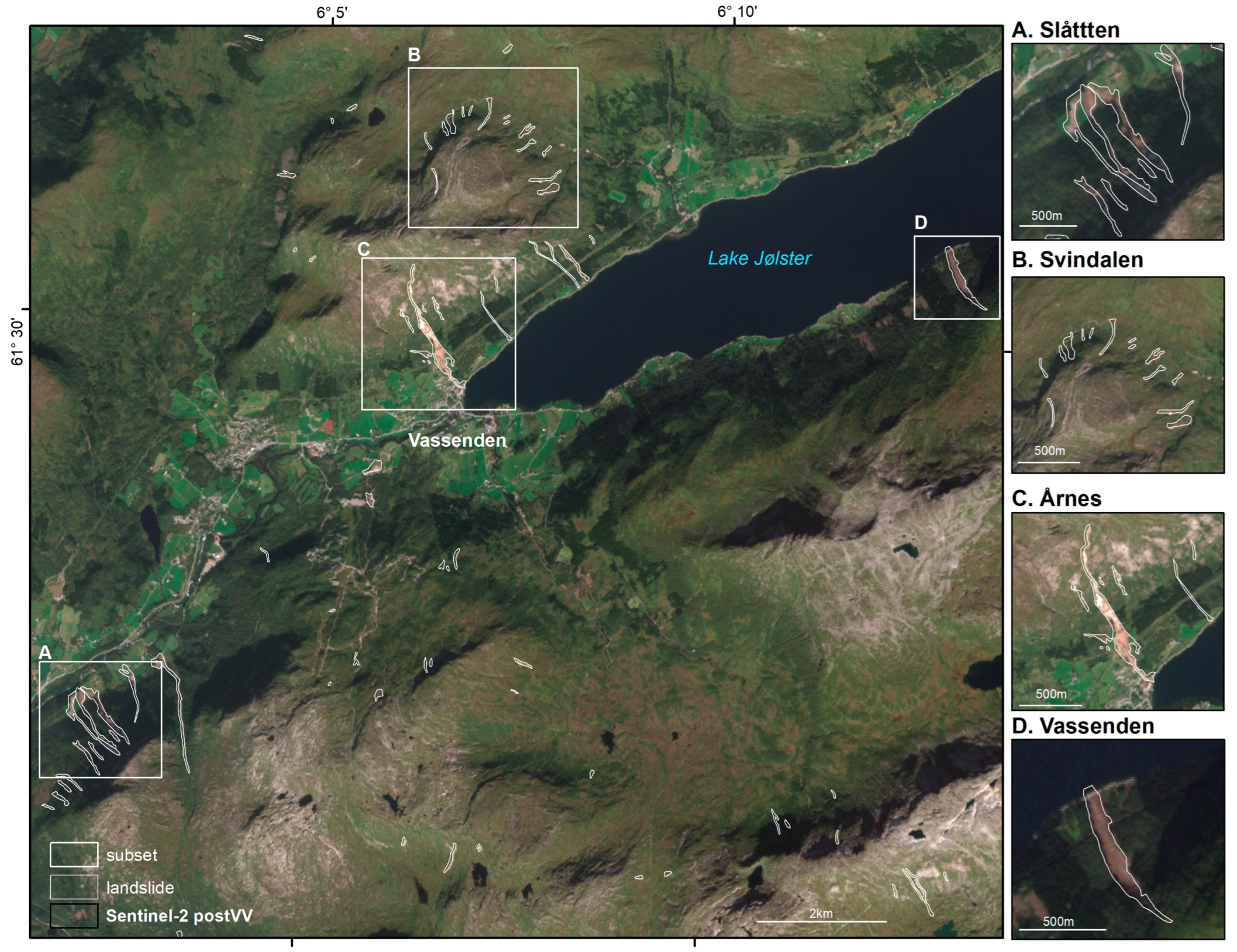
2. Norwegian Setting and Case Study
3. Methods
3.1. Generalized Globally-Trained Predictive Models
3.2. Locally-Trained Machine and Deep Learning Models
3.3. Performance Evaluation
4. Results
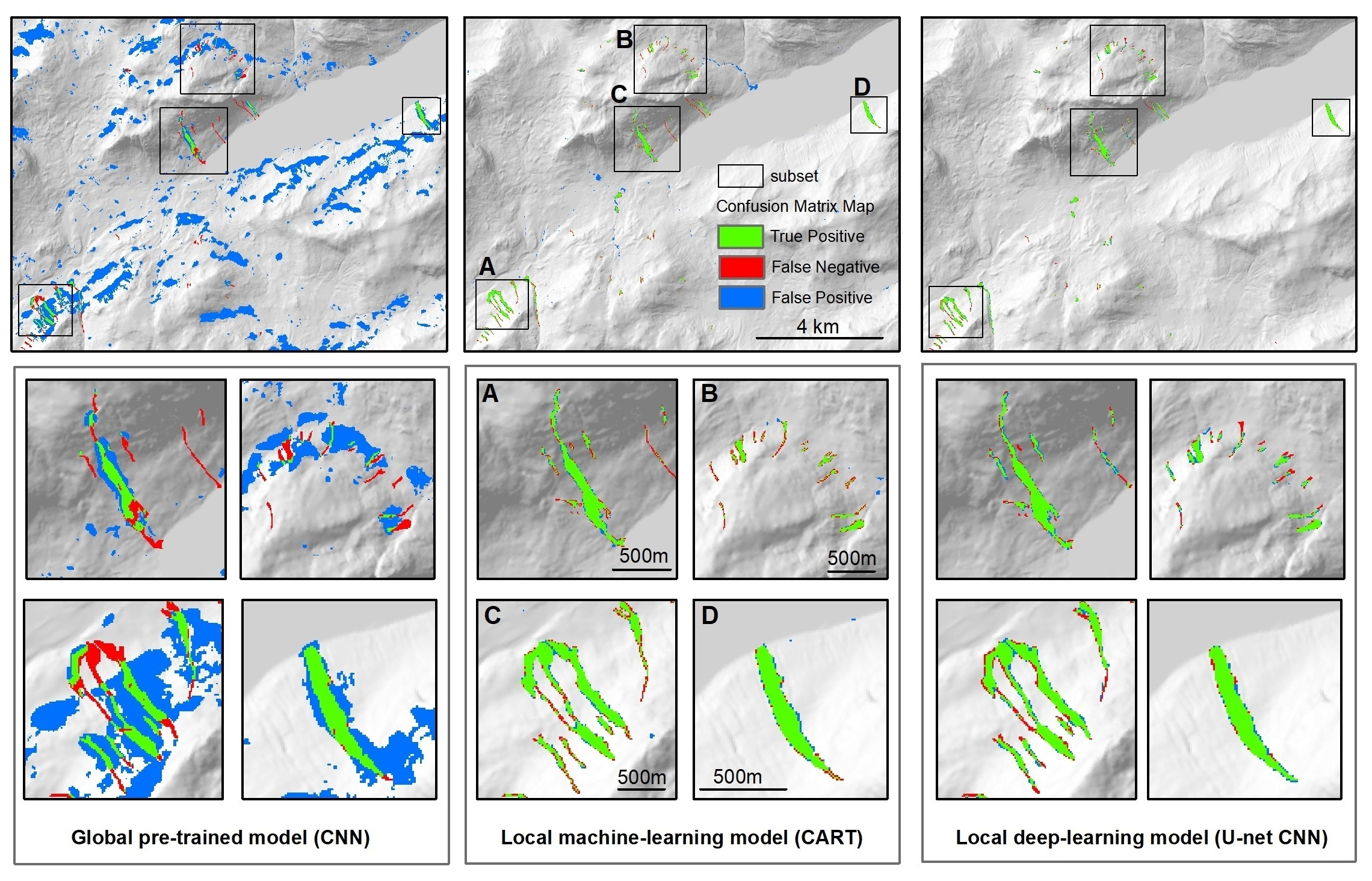
4.1. Globally Trained Models
- (i)
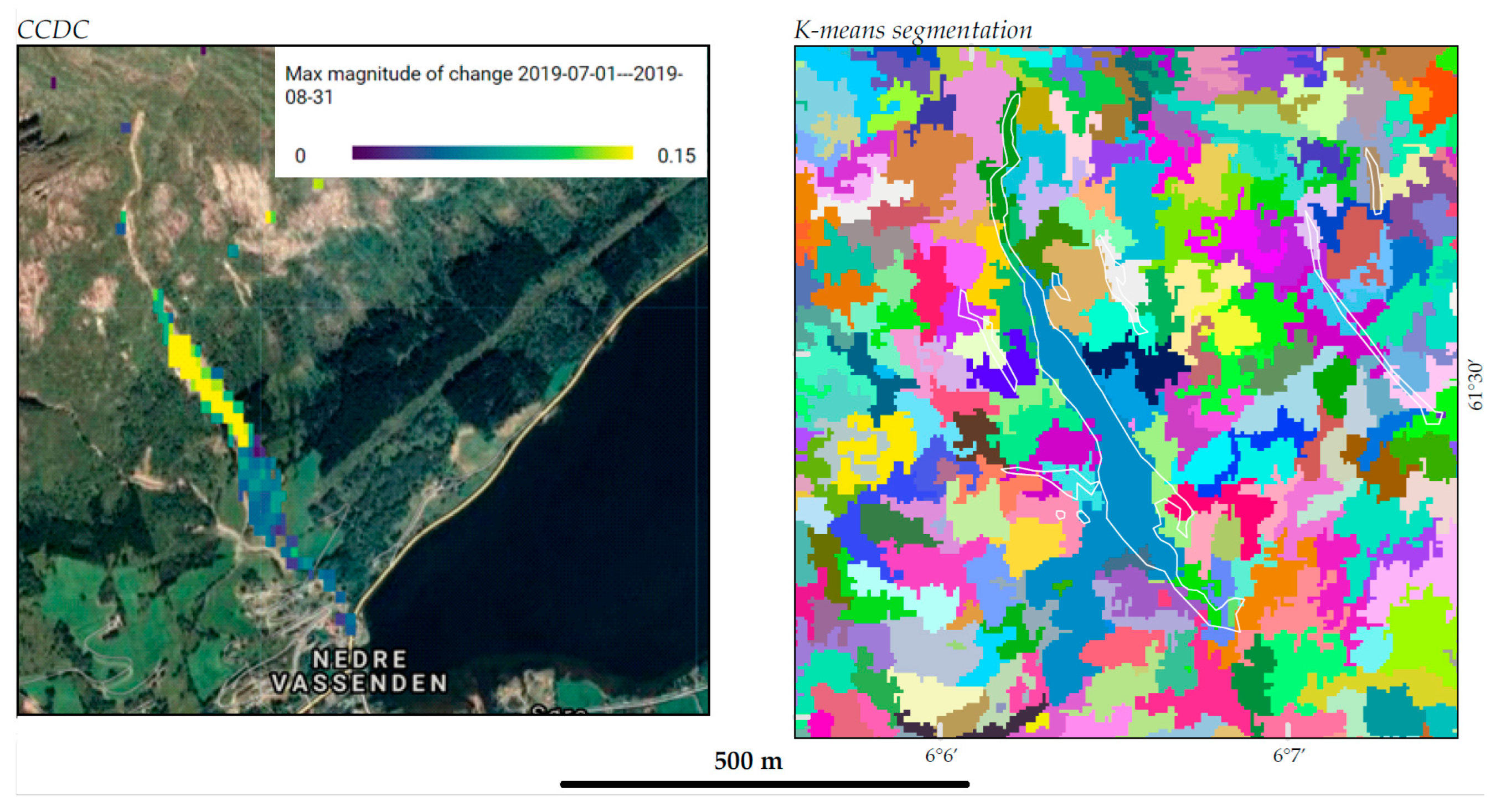
- CCDC time-series model:
- (ii)
- Tehrani machine learning model:
- (iii)
- Prakash CNN deep learning model:
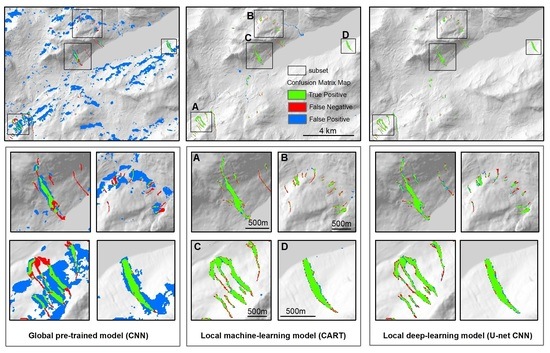
4.2. Locally Trained Models
- (iv)
- smile.CART machine learning model:
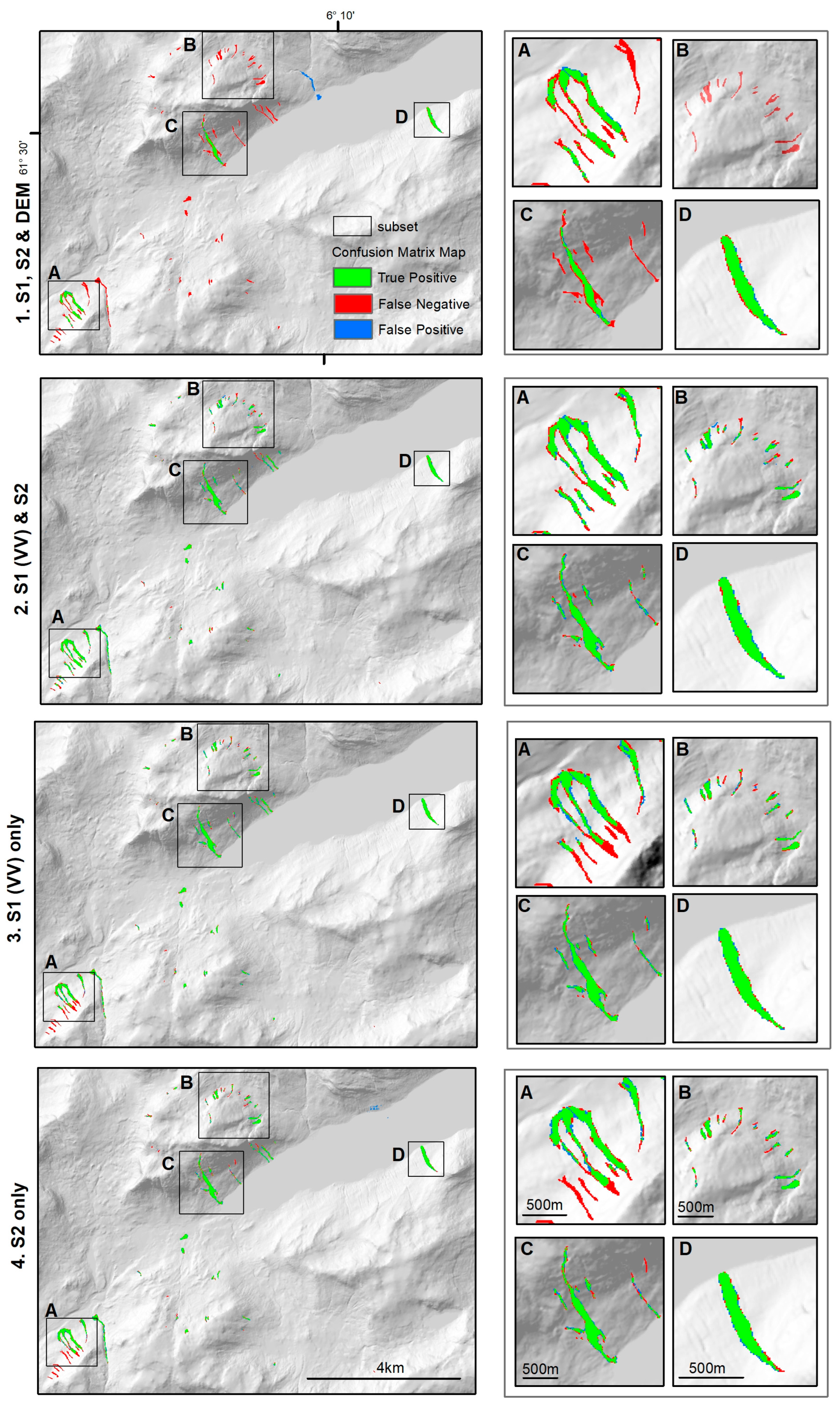
- (v) U-Net CNN Deep learning model
5. Discussion
5.1. Performance of Globally Pre-Trained Machine learning Models in a Glacial Landscape
5.2. Comparison of Locally Trained Machine Learning and Deep Learning Models and Input Data Combinations
5.3. Recommendations for an Operational Landslide Detection System and Future Research
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guzzetti, F.; Mondini, A.C.; Cardinali, M.; Fiorucci, F.; Santangelo, M.; Chang, K.-T. Landslide inventory maps: New tools for an old problem. Earth Sci. Rev. 2012, 112, 42–66. [Google Scholar] [CrossRef]
- Tehrani, F.S.; Calvello, M.; Liu, Z.; Zhang, L.; Lacasse, S. Machine learning and landslide studies: Recent advances and applications. Nat. Hazards 2022, 114, 1197–1245. [Google Scholar] [CrossRef]
- Reiche, J.; Mullissa, A.; Slagter, B.; Gou, Y.; Tsendbazar, N.-E.; Odongo-Braun, C.; Vollrath, A.; Weisse, M.J.; Stolle, F.; Pickens, A.; et al. Forest disturbance alerts for the Congo Basin using Sentinel-1. Environ. Res. Lett. 2021, 16, 24005. [Google Scholar] [CrossRef]
- Hansen, M.C.; Krylov, A.; Tyukavina, A.; Potapov, P.V.; Turubanova, S.; Zutta, B.; Ifo, S.; Margono, B.; Stolle, F.; Moore, R. Humid tropical forest disturbance alerts using Landsat data. Environ. Res. Lett. 2016, 11, 34008. [Google Scholar] [CrossRef]
- Vargas, C.; Montalban, J.; Leon, A.A. Early warning tropical forest loss alerts in Peru using Landsat. Environ. Res. Commun. 2019, 1, 121002. [Google Scholar] [CrossRef]
- Katiyar, V.; Tamkuan, N.; Nagai, M. Near-real-time flood mapping using off-the-shelf models with SAR imagery and deep learning. Remote Sens. 2021, 13, 2334. [Google Scholar] [CrossRef]
- Ban, Y.; Zhang, P.; Nascetti, A.; Bevington, A.R.; Wulder, M.A. Near real-time wildfire progression monitoring with Sentinel-1 SAR time series and deep learning. Sci. Rep. 2020, 10, 1322. [Google Scholar] [CrossRef]
- Zhang, P.; Ban, Y.; Nascetti, A. Learning U-Net without forgetting for near real-time wildfire monitoring by the fusion of SAR and optical time series. Remote Sens. Environ. 2021, 261, 112467. [Google Scholar] [CrossRef]
- Devoli, G.; Bell, R.; Cepeda, J. Susceptibility Map at Catchment Level, to Be Used in Landslide Forecasting; Norwegian Water Resources and Energy Directorate: Oslo, Norway, 2019. [Google Scholar]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef]
- Arévalo, P.; Bullock, E.L.; Woodcock, C.E.; Olofsson, P. A Suite of Tools for Continuous Land Change Monitoring in Google Earth Engine. Front. Clim. 2020, 2, 576740. [Google Scholar] [CrossRef]
- Prakash, N.; Manconi, A.; Loew, S. A new strategy to map landslides with a generalized convolutional neural network. Sci. Rep. 2021, 11, 9722. [Google Scholar] [CrossRef] [PubMed]
- Ghorbanzadeh, O.; Gholamnia, K.; Ghamisi, P. The application of ResU-net and OBIA for landslide detection from multi-temporal sentinel-2 images. Big Earth Data 2022, 1–26. [Google Scholar] [CrossRef]
- Nava, L.; Bhuyan, K.; Meena, S.R.; Monserrat, O.; Catani, F. Assessment of deep learning based landslide detection and mapping performances with backscatter SAR data. In Proceedings of the EGU General Assembly 2022, Vienna, Austria, 23–27 May 2022. [Google Scholar] [CrossRef]
- Bai, L.; Li, W.; Xu, Q.; Peng, W.; Chen, K.; Duan, Z.; Lu, H. Multispectral U-Net: A Semantic Segmentation Model Using Multispectral Bands Fusion Mechanism for Landslide Detection. In Proceedings of the 2nd Workshop on Complex Data Challenges in Earth Observation, Vienna, Austria, 25 July 2022. [Google Scholar]
- Dong, Z.; An, S.; Zhang, J.; Yu, J.; Li, J.; Xu, D. L-Unet: A Landslide Extraction Model Using Multi-Scale Feature Fusion and Attention Mechanism. Remote Sens. 2022, 14, 2552. [Google Scholar] [CrossRef]
- Fang, C.; Fan, X.; Zhong, H.; Lombardo, L.; Tanyas, H.; Wang, X. A Novel historical landslide detection approach based on LiDAR and lightweight attention U-Net. Remote Sens. 2022, 14, 4357. [Google Scholar] [CrossRef]
- Nava, L.; Monserrat, O.; Catani, F. Improving Landslide Detection on SAR Data through Deep Learning. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Kamiyama, J.; Noro, T.; Sakagami, M.; Suzuki, Y.; Yoshikawa, K.; Hikosaka, S.; Hirata, I. Detection of Landslide Candidate Interference Fringes in DInSAR Imagery Using Deep Learning. Recall 2018, 90, 94–95. [Google Scholar]
- Mondini, A.C.; Guzzetti, F.; Chang, K.-T.; Monserrat, O.; Martha, T.R.; Manconi, A. Landslide failures detection and mapping using Synthetic Aperture Radar: Past, present and future. Earth Sci. Rev. 2021, 216, 103574. [Google Scholar] [CrossRef]
- Bullock, E.L.; Healey, S.P.; Yang, Z.; Houborg, R.; Gorelick, N.; Tang, X.; Andrianirina, C. Timeliness in forest change monitoring: A new assessment framework demonstrated using Sentinel-1 and a continuous change detection algorithm. Remote Sens. Environ. 2022, 276, 113043. [Google Scholar] [CrossRef]
- Doblas, J.; Reis, M.S.; Belluzzo, A.P.; Quadros, C.B.; Moraes, D.R.V.; Almeida, C.A.; Maurano, L.E.P.; Carvalho, A.F.A.; Sant’Anna, S.J.S.; Shimabukuro, Y.E. DETER-R: An operational near-real time tropical forest disturbance warning system based on Sentinel-1 time series analysis. Remote Sens. 2022, 14, 3658. [Google Scholar] [CrossRef]
- Shumilo, L.; Kussul, N.; Lavreniuk, M. U-Net Model for Logging Detection Based on the Sentinel-1 and Sentinel-2 Data. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 4680–4683. [Google Scholar]
- Kirschbaum, D.B.; Adler, R.; Hong, Y.; Hill, S.; Lerner-Lam, A. A global landslide catalog for hazard applications: Method, results, and limitations. Nat. Hazards 2010, 52, 561–575. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Routledge: New York, NY, USA, 2017. [Google Scholar]
- NGU Landslides. Available online: https://www.ngu.no/en/topic/landslides (accessed on 21 December 2022).
- Luigi, S.; Guzzetti, F. Earth-Science Reviews Landslides in a changing climate. Earth Sci. Rev. 2016, 162, 227–252. [Google Scholar] [CrossRef]
- Herrera, G.; Mateos, R.M.; Garcia-Davalillo, J.C.; Grandjean, G.; Poyiadji, E.; Maftei, R.; Filipciuc, T.-C.; Auflič, M.J.; Jež, J.; Podolszki, L.; et al. Landslide databases in the Geological Surveys of Europe. Landslides 2018, 15, 359–379. [Google Scholar] [CrossRef]
- Jaedicke, C.; Lied, K.; Kronholm, K. Integrated database for rapid mass movements in Norway. Nat. Hazards Earth Syst. Sci. 2009, 9, 469–479. [Google Scholar] [CrossRef]
- Malamud, B.D.; Heijenk, R.A.; Taylor, F.E.; Wood, J.L. Road Influences on Landslide Inventories. In Proceedings of the EGU General Assembly 2022, Vienna, Austria, 23–27 May 2022. [Google Scholar] [CrossRef]
- Ruther, D.C.; Hefre, H.; Rubensdotter, L. Extreme precipitation-induced landslide event on 30th 3 July 2019 in Jølster, western Norway. Nor. J. Geol. 2022, 102, 202212. [Google Scholar]
- Lindsay, E.; Frauenfelder, R.; Rüther, D.; Nava, L.; Rubensdotter, L.; Strout, J.; Nordal, S. Multi-Temporal Satellite Image Composites in Google Earth Engine for Improved Landslide Visibility: A Case Study of a Glacial Landscape. Remote Sens. 2022, 14, 2301. [Google Scholar] [CrossRef]
- Meteorologisk Institutt. Rapport om Intense Byger med store Konsekvenser i Sogn og Fjordane 30. juli; Meteorologic Institute: Bergen, Norway, 2019; Available online: https://www.met.no/nyhetsarkiv/rapport-om-intense-byger-med-store-konsekvenser-i-sogn-og-fjordane-30.juli (accessed on 22 December 2022).
- Devoli, G.; Colleuille, H.; Sund, M.; Wasrud, J. Seven Years of Landslide Forecasting in Norway-Strengths and Limitations. In Understanding and Reducing Landslide Disaster Risk: Volume 3 Monitoring and Early Warning; Casagli, N., Tofani, V., Sassa, K., Bobrowsky, P.T., Takara, K., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 257–264. ISBN 978-3-030-60311-3. [Google Scholar]
- Hanssen-Bauer, I.; Drange, H.; Førland, E.J.; Roald, L.A.; Børsheim, K.Y.; Hisdal, H.; Lawrence, D.; Nesje, A.; Sandven, S.; Sorteberg, A.; et al. Climate in Norway 2100. 2009. Available online: https://www.researchgate.net/profile/Ingjerd-Haddeland/publication/316922280_Climate_in_Norway_2100/links/59194fab4585152e19a24c98/Climate-in-Norway-2100.pdf (accessed on 22 December 2022).
- Tehrani, F.S.; Santinelli, G.; Herrera, M.H. Multi-Regional landslide detection using combined unsupervised and supervised machine learning. Geomat. Nat. Hazards Risk 2021, 12, 1015–1038. [Google Scholar] [CrossRef]
- Herrera Herrera, M. Landslide Detection Using Random Forest Classifier; Delft University of Technology: Delft, The Netherlands, 2019. [Google Scholar]
- Bunting, P.; Gillingham, S. The KEA image file format. Comput. Geosci. 2013, 57, 54–58. [Google Scholar] [CrossRef]
- Braaten, J. Sentinel-2 Cloud Masking with s2cloudless. Available online: https://developers.google.com/earth-engine/tutorials/community/sentinel-2-s2cloudless (accessed on 22 December 2022).
- Vollrath, A.; Mullissa, A.; Reiche, J. Angular-Based Radiometric Slope Correction for Sentinel-1 on Google Earth Engine. Remote Sens. 2020, 12, 1867. [Google Scholar] [CrossRef]
- Levick, S.R. Lab 4-Image Classification-part 1. Remote Sens. 2017, 9, 329. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention-MICCAI 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Shelhamer, E.; Long, J.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar] [CrossRef]
- Ye, J.; Ni, J.; Yi, Y. Deep Learning Hierarchical Representations for Image Steganalysis. IEEE Trans. Inf. Forensics Secur. 2017, 12, 2545–2557. [Google Scholar] [CrossRef]
- Huang, S.-C.; Le, T.-H. Introduction to TensorFlow 2. In Principles and Labs for Deep Learning; Elsevier: Amsterdam, The Netherlands, 2021; pp. 1–26. [Google Scholar]
- Liu, Y.H. Feature Extraction and Image Recognition with Convolutional Neural Networks. J. Phys. Conf. Ser. 2018, 1087, 062032. [Google Scholar] [CrossRef]
- ArcGIS Pro Export Training Data For Deep Learning (Image Analyst). Available online: https://pro.arcgis.com/en/pro-app/latest/tool-reference/image-analyst/export-training-data-for-deep-learning.htm (accessed on 22 December 2022).
- Lindsay, E.; Devoli, G.; Reiches, J.; Nordal, S. In Progress: Spatial and Temporal Signatures of Landslides in C-Band SAR Data. 2023. [Google Scholar]
- Chicco, D.; Jurman, G. The Advantages of the Matthews Correlation Coefficient (MCC) over F1 Score and Accuracy in Binary Classification Evaluation; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1–13. [Google Scholar]
- Clerc, S. MPC-Team Terrain over-correction on shaded areas. In S2 MPC Level 2A Data Quality Report; ESA: Paris, France, 2022; Volume 45, p. 28. [Google Scholar]
- Jackson, J. Clarification on Difference between L1C and L2A Data. Available online: https://forum.step.esa.int/t/clarification-on-difference-between-l1c-and-l2a-data/24940/12 (accessed on 22 December 2022).
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef]
- Prakash, N.; Manconi, A.; Loew, S. Mapping landslides on EO data: Performance of deep learning models vs. Traditional machine learning models. Remote Sens. 2020, 12, 346. [Google Scholar] [CrossRef]
- NASA Quick Facts. Available online: https://nisar.jpl.nasa.gov/mission/quick-facts/ (accessed on 22 December 2022).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Run | No. of Bands | Bands |
|---|---|---|
| S1, S2, and DEM | 13 | Sentinel-1: pre-VV, post-VV, diff-VV, pre-VH, post-VH, diff-VH |
| Sentinel-2: post-R, post-G, post-B, post-NIR, dNDVI | ||
| Terrain: elevation, slope | ||
| S1 (VV) and S2 | 3 | Sentinel-1: pre-VV, post-VV |
| Sentinel-2: dNDVI | ||
| S1 (VV) only | 2 | pre-VV, post-VV |
| S2 only | 5 | post-R, post-G, post-B, post-NIR, dNDVI |
| Metric | Formula |
|---|---|
| Precision | |
| Recall | |
| F1-score | |
| MCC |
| Location | Input Image | Precision % | Recall % | F1-Score % | MCC % |
|---|---|---|---|---|---|
| Entire area | 1—S2_L1C | 5 | 4 | 4 | 4 |
| 2—S2_L2A | 2 | 45 | 5 | 9 | |
| 3—S2_L2A_gr | 2 | 37 | 4 | 7 | |
| A. Slåtten | 1—S2_L1C | 40 | 0 | 0 | 2 |
| 2—S2_L2A | 19 | 60 | 29 | 20 | |
| 3—S2_L2A_gr | 30 | 58 | 40 | 33 | |
| B. Svidalen | 1—S2_L1C | 86 | 1 | 1 | 8 |
| 2—S2_L2A | 6 | 28 | 9 | 8 | |
| 3—S2_L2A_gr | 8 | 6 | 7 | 5 | |
| C. Vassenden | 1—S2_L1C | 25 | 17 | 21 | 18 |
| 2—S2_L2A | 40 | 51 | 45 | 43 | |
| 3—S2_L2A_gr | 35 | 46 | 40 | 37 | |
| D. Årnes | 1—S2_L1C | - | 0 | 0 | - |
| 2—S2_L2A | 33 | 96 | 49 | 51 | |
| 3—S2_L2A_gr | 35 | 60 | 44 | 41 |
| MODEL | Setting 1 | Setting 2 | Setting 3 | Setting 4 | |
|---|---|---|---|---|---|
| S1, S2 & DEM | S1 (VV) & S2 | S1 (VV) only | S2 only | ||
| (iv) CART | precision % | 62 | 72 | 6 | 59 |
| recall % | 73 | 74 | 72 | 72 | |
| F1 % | 67 | 73 | 11 | 65 | |
| MCC | 63 | 73 | 20 | 65 | |
| (v) U-Net CNN | precision % | 80 | 83 | 85 | 84 |
| recall % | 33 | 79 | 74 | 73 | |
| F1 % | 47 | 81 | 79 | 78 | |
| MCC | 51 | 89 | 79 | 78 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ganerød, A.J.; Lindsay, E.; Fredin, O.; Myrvoll, T.-A.; Nordal, S.; Rød, J.K. Globally vs. Locally Trained Machine Learning Models for Landslide Detection: A Case Study of a Glacial Landscape. Remote Sens. 2023, 15, 895. https://doi.org/10.3390/rs15040895
Ganerød AJ, Lindsay E, Fredin O, Myrvoll T-A, Nordal S, Rød JK. Globally vs. Locally Trained Machine Learning Models for Landslide Detection: A Case Study of a Glacial Landscape. Remote Sensing. 2023; 15(4):895. https://doi.org/10.3390/rs15040895
Chicago/Turabian StyleGanerød, Alexandra Jarna, Erin Lindsay, Ola Fredin, Tor-Andre Myrvoll, Steinar Nordal, and Jan Ketil Rød. 2023. "Globally vs. Locally Trained Machine Learning Models for Landslide Detection: A Case Study of a Glacial Landscape" Remote Sensing 15, no. 4: 895. https://doi.org/10.3390/rs15040895
APA StyleGanerød, A. J., Lindsay, E., Fredin, O., Myrvoll, T.-A., Nordal, S., & Rød, J. K. (2023). Globally vs. Locally Trained Machine Learning Models for Landslide Detection: A Case Study of a Glacial Landscape. Remote Sensing, 15(4), 895. https://doi.org/10.3390/rs15040895