Linking the Remote Sensing of Geodiversity and Traits Relevant to Biodiversity—Part II: Geomorphology, Terrain and Surfaces

 , ,
, ,  , , , , , ,
, , , , , ,  ,
, 
 , ,
, ,  , , , , , , ,
, , , , , , ,  ,
, 
 , and
, and  add
Show full author list
add
Show full author list
Abstract
1. Introduction
- To document the state of the art of existing and upcoming RS technologies in air- and spaceborne RS for monitoring terrain and surfaces by using examples of aeolian-, fluvial- and coastal- landforms and their traits.
- To provide a short overview of existing RS data products in the context of geomorphology.
- To present a concise overview of the geomorphic characteristics and their traits that can be recorded by RS.
2. Remote Sensing Techniques for Monitoring Geomorphology—Terrain and Surfaces
2.1. Stereophotogrammetry and Related Approaches
2.2. Approaches by InSAR
2.3. LiDAR and RADAR Altimeters
2.4. Criteria for Acquiring Elevation Data and Surface Data with RS
2.4.1. Acquiring Elevation Data with RS
- The characteristics and the combinations of exogenous and endogenous geomorphic processes (the scope, length, intensity, consistency, dominance or overlay of the driver) lead to formation of specific geomorphological traits such as geological shapes, patterns, and structures. These process characteristics, in turn, define the characteristics and the accuracy of the monitoring, the possibilities of classification and the acquistion of relief parameters and thus other aspects derived from the topography and physiography like elevation, slope, aspect or curvature.
- Geomorphic trait characteristics, their composition, and configuration, such as the 2D–4 D shape, structure, patterns, density, or distribution of the geomorphic traits and trait variations in space and over time.
- The choice of the RS platform that influences the spatial and temporal resolution and ultimately the recordability and precision of the RS sensor properties of the geomorphic traits. With airborne LiDAR systems more accurate derivations of the DEM/DSM can be made compared to with spaceborne terrain RS approaches.
- The choice of the classification method (pixel-based, spectral-based, geographic objects based GEOBIA) and how well the applied classification algorithm and its assumptions fit the RS data and the spectral traits of geomorphology.
- A multi-variate and multi-temporal implementation of RS sensors such as RGB, multi-spectral, hyperspectral, LiDAR, RADAR or microwave radiometer, which not only increase the number but also the characteristics and diversity of traits and trait variations that can be recorded by RS.
- The coupling of in-situ, close range RS (ALS) with air- and spaceborne RS approaches, enabling the optimal calibration and validation of air- and spaceborne RS data.
2.4.2. Acquiring Surface Data on Vegetation and Urban Structures
3. Aeolian Landforms
4. Fluvial Landforms
4.1. Flood Events and Floodplain Risks
4.2. Fluvial and Tidal Channel Migration
4.3. Stream Bank Retreat
4.4. Flood Hazard
4.5. Coastal Landforms
5. A Summary of Future RS Technologies and Existing Data Products for Monitoring Geomorphological Forms and Traits Relevant to Biodiversity
6. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Antonelli, A.; Kissling, W.D.; Flantua, S.G.A.; Bermúdez, M.A.; Mulch, A.; Muellner-Riehl, A.N.; Kreft, H.; Linder, H.P.; Badgley, C.; Fjeldså, J.; et al. Geological and climatic influences on mountain biodiversity. Nat. Geosci. 2018, 11, 718–725. [Google Scholar] [CrossRef]
- Leser, H.; Löffler, J. Landschaftsökologie; Auflage: 5.; Eugen Ulmer KG: Stuttgart, Germany, 2017; ISBN 3825287181. [Google Scholar]
- Lausch, A.; Baade, J.; Bannehr, L.; Borg, E.; Bumberger, J.; Chabrilliat, S.; Dietrich, P.; Gerighausen, H.; Glässer, C.; Hacker, J.; et al. Linking Remote Sensing and Geodiversity and Their Traits Relevant to Biodiversity—Part I: Soil Characteristics. Remote Sens. 2019, 11, 2356. [Google Scholar] [CrossRef]
- Green, J.L.; Bohannan, B.J.M.; Whitaker, R.J. Microbial Biogeography: From Taxonomy to Traits. Science 2008, 320, 1039–1043. [Google Scholar] [CrossRef]
- Read, Q.D.; Zarnetske, P.L.; Record, S.; Dahlin, K.M.; Costanza, J.K.; Finley, A.O.; Gaddis, K.D.; Grady, J.M.; Hobi, M.L.; Latimer, A.M.; et al. Beyond counts and averages: Relating geodiversity to dimensions of biodiversity. Glob. Ecol. Biogeogr. 2020, 29, 696–710. [Google Scholar] [CrossRef]
- Muellner-Riehl, A.N.; Schnitzler, J.; Kissling, W.D.; Mosbrugger, V.; Rijsdijk, K.F.; Seijmonsbergen, A.C.; Versteegh, H.; Favre, A. Origins of global mountain plant biodiversity: Testing the ‘mountain-geobiodiversity hypothesis’. J. Biogeogr. 2019, 46, 2826–2838. [Google Scholar] [CrossRef]
- Lawler, J.J.; Ackerly, D.D.; Albano, C.M.; Anderson, M.G.; Dobrowski, S.Z.; Gill, J.L.; Heller, N.E.; Pressey, R.L.; Sanderson, E.W.; Weiss, S.B. The theory behind, and the challenges of, conserving nature’s stage in a time of rapid change. Conserv. Biol. 2015, 29, 618–629. [Google Scholar] [CrossRef]
- Comer, P.J.; Pressey, R.L.; Hunter, M.L.; Schloss, C.A.; Buttrick, S.C.; Heller, N.E.; Tirpak, J.M.; Faith, D.P.; Cross, M.S.; Shaffer, M.L. Incorporating geodiversity into conservation decisions. Conserv. Biol. 2015, 29, 692–701. [Google Scholar] [CrossRef]
- Haase, P.; Tonkin, J.D.; Stoll, S.; Burkhard, B.; Frenzel, M.; Geijzendorffer, I.R.; Häuser, C.; Klotz, S.; Kühn, I.; McDowell, W.H.; et al. The next generation of site-based long-term ecological monitoring: Linking essential biodiversity variables and ecosystem integrity. Sci. Total Environ. 2018, 613–614, 1376–1384. [Google Scholar] [CrossRef]
- Theobald, D.M. A general model to quantify ecological integrity for landscape assessments and US application. Landsc. Ecol. 2013, 28, 1859–1874. [Google Scholar] [CrossRef]
- Gordon, J.E.; Crofts, R.; Díaz-Martínez, E.; Woo, K.S. Enhancing the Role of Geoconservation in Protected Area Management and Nature Conservation. Geoheritage 2018, 10, 191–203. [Google Scholar] [CrossRef]
- Burek, C.V.; Prosser, C.D. The history of geoconservation: An introduction. Geol. Soc. Spec. Publ. 2008, 300, 1–5. [Google Scholar] [CrossRef]
- Matthews, T.J. Integrating Geoconservation and Biodiversity Conservation: Theoretical Foundations and Conservation Recommendations in a European Union Context. Geoheritage 2014, 6, 57–70. [Google Scholar] [CrossRef]
- Gray, M.; Gordon, J.E.; Brown, E.J. Geodiversity and the ecosystem approach: The contribution of geoscience in delivering integrated environmental management. Proc. Geol. Assoc. 2013, 124, 659–673. [Google Scholar] [CrossRef]
- Schrodt, F.; Bailey, J.J.; Kissling, W.D.; Rijsdijk, K.F.; Seijmonsbergen, A.C.; van Ree, D.; Hjort, J.; Lawley, R.S.; Williams, C.N.; Anderson, M.G.; et al. Opinion: To advance sustainable stewardship, we must document not only biodiversity but geodiversity. Proc. Natl. Acad. Sci. USA 2019, 116, 16155–16158. [Google Scholar] [CrossRef]
- Alexandrowicz, Z.; Margielewski, W. Impact of mass movements on geo- and biodiversity in the Polish Outer (Flysch) Carpathians. Geomorphology 2010, 123, 290–304. [Google Scholar] [CrossRef]
- Tukiainen, H.; Kiuttu, M.; Kalliola, R.; Alahuhta, J.; Hjort, J. Landforms contribute to plant biodiversity at alpha, beta and gamma levels. J. Biogeogr. 2019, 46, 1699–1710. [Google Scholar] [CrossRef]
- Guitet, S.; Pélissier, R.; Brunaux, O.; Jaouen, G.; Sabatier, D. Geomorphological landscape features explain floristic patterns in French Guiana rainforest. Biodivers. Conserv. 2015, 24, 1215–1237. [Google Scholar] [CrossRef]
- Jin, X.; Wan, L.; Zhang, Y.-K.; Hu, G.; Schaepman, M.E.; Clevers, J.G.P.W.; Su, Z.B. Quantification of spatial distribution of vegetation in the Qilian Mountain area with MODIS NDVI. Int. J. Remote Sens. 2009, 30, 5751–5766. [Google Scholar] [CrossRef]
- Dobrowski, S.Z. A climatic basis for microrefugia: The influence of terrain on climate. Glob. Chang. Biol. 2011, 17, 1022–1035. [Google Scholar] [CrossRef]
- Schmidtlein, S.; Feilhauer, H.; Bruelheide, H. Mapping plant strategy types using remote sensing. J. Veg. Sci. 2012, 23, 395–405. [Google Scholar] [CrossRef]
- Scaioni, M.; Longoni, L.; Melillo, V.; Papini, M. Remote Sensing for Landslide Investigations: An Overview of Recent Achievements and Perspectives. Remote Sens. 2014, 6, 9600–9652. [Google Scholar] [CrossRef]
- le Roux, P.C.; Luoto, M. Earth surface processes drive the richness, composition and occurrence of plant species in an arctic-alpine environment. J. Veg. Sci. 2014, 25, 45–54. [Google Scholar] [CrossRef]
- Amatulli, G.; McInerney, D.; Sethi, T.; Strobl, P.; Domisch, S. Geomorpho90m, empirical evaluation and accuracy assessment of global high-resolution geomorphometric layers. Sci. Data 2020, 7, 162. [Google Scholar] [CrossRef]
- Pánek, T. Landslides and Quaternary climate changes—The state of the art. Earth-Science Rev. 2019, 196, 102871. [Google Scholar] [CrossRef]
- Möller, M.; Volk, M.; Friedrich, K.; Lymburner, L. Placing soil-genesis and transport processes into a landscape context: A multiscale terrain-analysis approach. J. Plant Nutr. Soil Sci. 2008, 171, 419–430. [Google Scholar] [CrossRef]
- Möller, M.; Volk, M. Effective map scales for soil transport processes and related process domains - Statistical and spatial characterization of their scale-specific inaccuracies. Geoderma 2015, 247–248, 151–160. [Google Scholar] [CrossRef]
- Burnett, M.R.; August, P.V.; Brown, J.H.; Killingbeck, K.T. The Influence of Geomorphological Heterogeneity on Biodiversity I. A Patch-Scale Perspective. Conserv. Biol. 2008, 12, 363–370. [Google Scholar] [CrossRef]
- Bétard, F. Patch-Scale Relationships Between Geodiversity and Biodiversity in Hard Rock Quarries: Case Study from a Disused Quartzite Quarry in NW France. Geoheritage 2013, 5, 59–71. [Google Scholar] [CrossRef]
- Pellitero, R.; Manosso, F.C.; Serrano, E. Mid- and large-scale geodiversity calculation in fuentes carrionas (nw spain) and serra do cadeado (paraná, brazil): Methodology and application for land management. Geogr. Ann. Ser. A Phys. Geogr. 2015, 97, 219–235. [Google Scholar] [CrossRef]
- Parks, K.E.; Mulligan, M. On the relationship between a resource based measure of geodiversity and broad scale biodiversity patterns. Biodivers. Conserv. 2010, 19, 2751–2766. [Google Scholar] [CrossRef]
- Bailey, J.J.; Boyd, D.S.; Hjort, J.; Lavers, C.P.; Field, R. Modelling native and alien vascular plant species richness: At which scales is geodiversity most relevant? Glob. Ecol. Biogeogr. 2017, 26, 763–776. [Google Scholar] [CrossRef]
- Bergen, K.M.; Goetz, S.J.; Dubayah, R.O.; Henebry, G.M.; Hunsaker, C.T.; Imhoff, M.L.; Nelson, R.F.; Parker, G.G.; Radeloff, V.C. Remote sensing of vegetation 3-D structure for biodiversity and habitat: Review and implications for lidar and radar spaceborne missions. J. Geophys. Res. Biogeosciences 2009, 114, 13. [Google Scholar] [CrossRef]
- Rahbek, C.; Borregaard, M.K.; Colwell, R.K.; Dalsgaard, B.; Holt, B.G.; Morueta-Holme, N.; Nogues-Bravo, D.; Whittaker, R.J.; Fjeldså, J. Humboldt’s enigma: What causes global patterns of mountain biodiversity? Science 2019, 365, 1108–1113. [Google Scholar] [CrossRef]
- Blanco-Pastor, J.L.; Fernández-Mazuecos, M.; Coello, A.J.; Pastor, J.; Vargas, P. Topography explains the distribution of genetic diversity in one of the most fragile European hotspots. Divers. Distrib. 2019, 25, 74–89. [Google Scholar] [CrossRef]
- Muscarella, R.; Kolyaie, S.; Morton, D.C.; Zimmerman, J.K.; Uriarte, M. Effects of topography on tropical forest structure depend on climate context. J. Ecol. 2020, 108, 145–159. [Google Scholar] [CrossRef]
- Stein, A.; Gerstner, K.; Kreft, H. Environmental heterogeneity as a universal driver of species richness across taxa, biomes and spatial scales. Ecol. Lett. 2014, 17, 866–880. [Google Scholar] [CrossRef]
- Schrodt, F.; Santos, M.J.; Bailey, J.J.; Field, R. Challenges and opportunities for biogeography—What can we still learn from von Humboldt? J. Biogeogr. 2019, 46, 1631–1642. [Google Scholar] [CrossRef]
- Barbarella, M.; Cuomo, A.; Di Benedetto, A.; Fiani, M.; Guida, D. Topographic Base Maps from Remote Sensing Data for Engineering Geomorphological Modelling: An Application on Coastal Mediterranean Landscape. Geosciences 2019, 9, 500. [Google Scholar] [CrossRef]
- Capolongo, D.; Refice, A.; Bocchiola, D.; D’Addabbo, A.; Vouvalidis, K.; Soncini, A.; Zingaro, M.; Bovenga, F.; Stamatopoulos, L. Coupling multitemporal remote sensing with geomorphology and hydrological modeling for post flood recovery in the Strymonas dammed river basin (Greece). Sci. Total Environ. 2019, 651, 1958–1968. [Google Scholar] [CrossRef]
- Leitão, P.J.; Santos, M.J. Improving Models of Species Ecological Niches: A Remote Sensing Overview. Front. Ecol. Evol. 2019, 7, 1–7. [Google Scholar] [CrossRef]
- Kulp, S.A.; Strauss, B.H. New elevation data triple estimates of global vulnerability to sea-level rise and coastal flooding. Nat. Commun. 2019, 10, 4844. [Google Scholar] [CrossRef] [PubMed]
- Parajuli, S.P.; Yang, Z.-L.; Kocurek, G. Mapping erodibility in dust source regions based on geomorphology, meteorology, and remote sensing. J. Geophys. Res. Earth Surf. 2014, 119, 1977–1994. [Google Scholar] [CrossRef]
- Eegholm, B.H.; Wake, S.; Denny, Z.; Dogoda, P.; Poulios, D.; Coyle, B.; Mule, P.; Hagopian, J.G.; Thompson, P.; Ramos-Izquierdo, L.; et al. Global Ecosystem Dynamics Investigation (GEDI) instrument alignment and test. In Proceedings of the Optical Modeling and System Alignment, San Diego, CA, USA, 12–13 August 2019. [Google Scholar]
- Dubayah, R.; Blair, J.B.; Goetz, S.; Fatoyinbo, L.; Hansen, M.; Healey, S.; Hofton, M.; Hurtt, G.; Kellner, J.; Luthcke, S.; et al. The Global Ecosystem Dynamics Investigation: High-resolution laser ranging of the Earth’s forests and topography. Sci. Remote Sens. 2020, 1, 100002. [Google Scholar] [CrossRef]
- Krieger, G.; Pardini, M.; Schulze, D.; Bachmann, M.; Borla Tridon, D.; Reimann, J.; Brautigam, B.; Steinbrecher, U.; Tienda, C.; Sanjuan Ferrer, M.; et al. Tandem-L: Main results of the phase a feasibility study. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; IEEE. pp. 2116–2119. [Google Scholar]
- Moreira, A.; Krieger, G.; Gonzalez, C.; Nannini, M.; Zink, M. Tandem-L: A Highly Innovative Bistatic SAR Mission for Monitoring Earth’s System Dynamics. Geophys. Res. Abstr. 2019, 21, 2019. [Google Scholar]
- Rast, M.; Painter, T.H. Earth Observation Imaging Spectroscopy for Terrestrial Systems: An Overview of Its History, Techniques, and Applications of Its Missions. Surv. Geophys. 2019, 40, 303–331. [Google Scholar] [CrossRef]
- Nieke, J.; Rast, M. Towards the Copernicus Hyperspectral Imaging Mission For The Environment (CHIME). In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; IEEE. pp. 157–159. [Google Scholar]
- Hulley, G.C.; Ghent, D.; Hook, S.J. A Look to the Future: Thermal-Infrared Missions and Measurements. In Taking the Temperature of the Earth; Elsevier: Amsterdam, The Netherlands, 2019; pp. 227–237. Available online: https://www.sciencedirect.com/book/9780128144589/taking-the-temperature-of-the-earth#book-description (accessed on 22 September 2020).
- Guanter, L.; Kaufmann, H.; Segl, K.; Foerster, S.; Rogass, C.; Chabrillat, S.; Kuester, T.; Hollstein, A.; Rossner, G.; Chlebek, C.; et al. The EnMAP Spaceborne Imaging Spectroscopy Mission for Earth Observation. Remote Sens. 2015, 7, 8830–8857. [Google Scholar] [CrossRef]
- Zarnetske, P.L.; Read, Q.D.; Record, S.; Gaddis, K.D.; Pau, S.; Hobi, M.L.; Malone, S.L.; Costanza, J.M.; Dahlin, K.; Latimer, A.M.; et al. Towards connecting biodiversity and geodiversity across scales with satellite remote sensing. Glob. Ecol. Biogeogr. 2019, 28, 548–556. [Google Scholar] [CrossRef]
- Lausch, A.; Bastian, O.; Klotz, S.; Leitão, P.J.; Jung, A.; Rocchini, D.; Schaepman, M.E.; Skidmore, A.K.; Tischendorf, L.; Knapp, S. Understanding and assessing vegetation health by in situ species and remote-sensing approaches. Methods Ecol. Evol. 2018, 9, 1799–1809. [Google Scholar] [CrossRef]
- Lausch, A.; Bannehr, L.; Beckmann, M.; Boehm, C.; Feilhauer, H.; Hacker, J.M.; Heurich, M.; Jung, A.; Klenke, R.; Neumann, C.; et al. Linking Earth Observation and taxonomic, structural and functional biodiversity: Local to ecosystem perspectives. Ecol. Indic. 2016, 70, 317–339. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Allen, R.; Anderson, M.; Belward, A.; Bindschadler, R.; Cohen, W.; Gao, F.; Goward, S.N.; Helder, D.; Helmer, E.; et al. Free Access to Landsat Imagery. Science 2008, 320, 1011–1012. [Google Scholar] [CrossRef]
- Zhu, Z.; Wulder, M.A.; Roy, D.P.; Woodcock, C.E.; Hansen, M.C.; Radeloff, V.C.; Healey, S.P.; Schaaf, C.; Hostert, P.; Strobl, P.; et al. Benefits of the free and open Landsat data policy. Remote Sens. Environ. 2019, 224, 382–385. [Google Scholar] [CrossRef]
- Wulder, M.A.; Loveland, T.R.; Roy, D.P.; Crawford, C.J.; Masek, J.G.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Belward, A.S.; Cohen, W.B.; et al. Current status of Landsat program, science, and applications. Remote Sens. Environ. 2019, 225, 127–147. [Google Scholar] [CrossRef]
- Masek, J.G.; Wulder, M.A.; Markham, B.; McCorkel, J.; Crawford, C.J.; Storey, J.; Jenstrom, D.T. Landsat 9: Empowering open science and applications through continuity. Remote Sens. Environ. 2020, 248, 111968. [Google Scholar] [CrossRef]
- Dlamini, S.N.; Beloconi, A.; Mabaso, S.; Vounatsou, P.; Impouma, B.; Fall, I.S. Review of remotely sensed data products for disease mapping and epidemiology. Remote Sens. Appl. Soc. Environ. 2019, 14, 108–118. [Google Scholar] [CrossRef]
- Tromp-van Meerveld, H.J.; McDonnell, J.J. On the interrelations between topography, soil depth, soil moisture, transpiration rates and species distribution at the hillslope scale. Adv. Water Resour. 2006, 29, 293–310. [Google Scholar] [CrossRef]
- Bardgett, R.D.; Wardle, D.A. Aboveground-Belowground Linkages: Biotic Interactions, Ecosystem Processes, and Global Change; Oxford University Press: Oxford, UK, 2010; ISBN 0199546886. [Google Scholar]
- Skidmore, A.K. A comparison of techniques for calculating gradient and aspect from a gridded digital elevation model. Int. J. Geogr. Inf. Syst. 1989, 3, 323–334. [Google Scholar] [CrossRef]
- Skidmore, A.K. Terrain position as mapped from a gridded digital elevation model. Int. J. Geogr. Inf. Syst. 1990, 4, 33–49. [Google Scholar] [CrossRef]
- McLean, K.A.; Trainor, A.M.; Asner, G.P.; Crofoot, M.C.; Hopkins, M.E.; Campbell, C.J.; Martin, R.E.; Knapp, D.E.; Jansen, P.A. Movement patterns of three arboreal primates in a Neotropical moist forest explained by LiDAR-estimated canopy structure. Landsc. Ecol. 2016, 31, 1849–1862. [Google Scholar] [CrossRef]
- Broadbent, E.N.; Zambrano, A.M.A.; Asner, G.P.; Field, C.B.; Rosenheim, B.E.; Kennedy-Bowdoin, T.; Knapp, D.E.; Burke, D.; Giardina, C.; Cordell, S. Linking rainforest ecophysiology and microclimate through fusion of airborne LiDAR and hyperspectral imagery. Ecosphere 2014, 5, art57. [Google Scholar] [CrossRef]
- Lembrechts, J.J.; Nijs, I.; Lenoir, J. Incorporating microclimate into species distribution models. Ecography 2019, 42, 1267–1279. [Google Scholar] [CrossRef]
- Murrian, M.J.; Gonzalez, C.W.; Humphreys, T.E.; Novlan, T.D. A dense reference network for mass-market centimeter-accurate positioning. In Proceedings of the 2016 IEEE/ION Position, Savannah, Georgia, USA, 11–16 April 2016; IEEE. pp. 243–254. [Google Scholar]
- Ancillao, A. Stereophotogrammetry in Functional Evaluation: History and Modern Protocols. In SpringerBriefs in Applied Sciences and Technology; Springer: Rome, Italy, 2018; pp. 1–29. [Google Scholar]
- Rosen, P.A.; Hensley, S.; Gurrola, E.; Rogez, F.; Chan, S.; Martin, J.; Rodriguez, E. SRTM C-band topographic data: Quality assessments and calibration activities. In Proceedings of the IGARSS 2001. Scanning the Present and Resolving the Future. Proceedings. IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No.01CH37217), Sydney, NSW, Australia, 9–13 July 2001; 2001; Volume 2, pp. 739–741. [Google Scholar]
- McElroy, J.L.; Eckert, J.A.; Hager, C.J. Airborne downlooking lidar measurements during state 78. Atmos. Environ. 1981, 15, 2223–2230. [Google Scholar] [CrossRef]
- Okyay, U.; Telling, J.; Glennie, C.L.; Dietrich, W.E. Airborne lidar change detection: An overview of Earth sciences applications. Earth-Science Rev. 2019, 198, 102929. [Google Scholar] [CrossRef]
- Pieraccini, M.; Miccinesi, L. Ground-Based Radar Interferometry: A Bibliographic Review. Remote Sens. 2019, 11, 1029. [Google Scholar] [CrossRef]
- Strozzi, T.; Kaab, A.; Frauenfelder, R.; Wegmuller, U. Detection and monitoring of unstable high-mountain slopes with L-band SAR interferometry. In Proceedings of the IGARSS 2003. 2003 IEEE International Geoscience and Remote Sensing Symposium. Proceedings (IEEE Cat. No.03CH37477), Toulouse, France, 21–25 July 2003; IEEE. Volume 3, pp. 1852–1854. [Google Scholar]
- Tang, P.; Chen, F.; Tian, B.; Zhang, H.; Miao, Z.; Wang, Q.; Zhou, W. Monitoring of surface instability in tourist zones in Sanya (China) using high-resolution SAR interferometry. Remote Sens. Lett. 2019, 10, 129–138. [Google Scholar] [CrossRef]
- Mashaly, J.; Ghoneim, E. Flash Flood Hazard Using Optical, Radar, and Stereo-Pair Derived DEM: Eastern Desert, Egypt. Remote Sens. 2018, 10, 1204. [Google Scholar] [CrossRef]
- Capaldo, P.; Nascetti, A.; Porfiri, M.; Pieralice, F.; Fratarcangeli, F.; Crespi, M.; Toutin, T. Evaluation and comparison of different radargrammetric approaches for Digital Surface Models generation from COSMO-SkyMed, TerraSAR-X, RADARSAT-2 imagery: Analysis of Beauport (Canada) test site. ISPRS J. Photogramm. Remote Sens. 2015, 100, 60–70. [Google Scholar] [CrossRef]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Madrigal, V.P.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Manfreda, S.; Dvorak, P.; Mullerova, J.; Herban, S.; Vuono, P.; Juan, J.; Justel, A.; Perks, M. Accuracy Assessment on Unmanned Aerial System Derived Digital Surface Models. Preprints 2018, 2018, 2018090579. [Google Scholar]
- Ewertowski, M.W.; Tomczyk, A.M.; Evans, D.J.A.; Roberts, D.H.; Ewertowski, W. Operational Framework for Rapid, Very-high Resolution Mapping of Glacial Geomorphology Using Low-cost Unmanned Aerial Vehicles and Structure-from-Motion Approach. Remote Sens. 2019, 11, 65. [Google Scholar] [CrossRef]
- Suomalainen, J.; Anders, N.; Iqbal, S.; Roerink, G.; Franke, J.; Wenting, P.; Hünniger, D.; Bartholomeus, H.; Becker, R.; Kooistra, L. A lightweight hyperspectral mapping system and photogrammetric processing chain for unmanned aerial vehicles. Remote Sens. 2014, 6, 11013–11030. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Forsmoo, J.; Anderson, K.; Macleod, C.J.A.; Wilkinson, M.E.; DeBell, L.; Brazier, R.E. Structure from motion photogrammetry in ecology: Does the choice of software matter? Ecol. Evol. 2019, 9, 12964–12979. [Google Scholar] [CrossRef] [PubMed]
- Anderson, K.; Westoby, M.J.; James, M.R. Low-budget topographic surveying comes of age: Structure from motion photogrammetry in geography and the geosciences. Prog. Phys. Geogr. 2019, 43, 163–173. [Google Scholar] [CrossRef]
- Kröhnert, M.; Anderson, R.; Bumberger, J.; Dietrich, P.; Harpole, W.S.; Maas, H.-G. WATCHING GRASS GROW - A PILOT STUDY ON THE SUITABILITY OF PHOTOGRAMMETRIC TECHNIQUES FOR QUANTIFYING CHANGE IN ABOVEGROUND BIOMASS IN GRASSLAND EXPERIMENTS. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-2, 539–542. [Google Scholar]
- Thiel, C.; Baade, J.; Schmullius, C. Comparison of UAV photograph-based and airborne lidar-based point clouds over forest from a forestry application perspective. Int. J. Remote Sens. 2017, 38, 2411–2426. [Google Scholar] [CrossRef]
- Tachikawa, T.; Hato, M.; Kaku, M.; Iwasaki, A. Characteristics of ASTER GDEM version 2. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; IEEE. pp. 3657–3660. [Google Scholar]
- Gesch, D.; Oimoen, M.; Danielson, J.; Meyer, D. Validation of the ASTER global digital elevation model version 3 over the Conterminous United States. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2016, 41, 143–148. [Google Scholar] [CrossRef]
- Tadono, T.; Shimada, M. Calibration of PRISM and AVNIR-2 onboard ALOS “Daichi”. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4042–4050. [Google Scholar] [CrossRef]
- Takaku, J.; Tadono, T.; Tsutsui, K. Generation of high resolution global DSM from ALOS PRISM. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2014, 40, 243–248. [Google Scholar] [CrossRef]
- Aldosari, A.A.; Jacobsen, K. Quality of Height Models Covering Large Areas. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2019, 87, 177–190. [Google Scholar] [CrossRef]
- Alganci, U.; Besol, B.; Sertel, E. Accuracy Assessment of Different Digital Surface Models. ISPRS Int. J. Geo-Inf. 2018, 7, 114. [Google Scholar] [CrossRef]
- Hajnsek, I.; Pottier, E.; Cloude, S.R. Inversion of surface parameters from polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 2003, 41, 727–744. [Google Scholar] [CrossRef]
- Zebker, H.A.; Goldstein, R.M. Topographic mapping from interferometric synthetic aperture radar observations. J. Geophys. Res. 1986, 91, 4993. [Google Scholar] [CrossRef]
- Graham, L.C. Synthetic Interferometer Radar For Topographic Mapping. Proc. IEEE 1974, 62, 763–768. [Google Scholar] [CrossRef]
- Hagberg, J.O.; Ulander, L.M.H.; Askne, J. Repeat-pass SAR interferometry over forested terrain. IEEE Trans. Geosci. Remote Sens. 1995, 33, 331–340. [Google Scholar] [CrossRef]
- Hyyppä, J.; Hallikainen, M. A Helicopter-Borne Eight-Channel Ranging Scatterometer for Remote Sensing: Part I System Description. IEEE Trans. Geosci. Remote Sens. 1993, 31, 170–179. [Google Scholar] [CrossRef]
- Thiel, C.; Schmullius, C. Investigating ALOS PALSAR interferometric coherence in central Siberia at unfrozen and frozen conditions: Implications for forest growing stock volume estimation. Can. J. Remote Sens. 2013, 39, 232–250. [Google Scholar] [CrossRef]
- Thiel, C.; Schmullius, C. Investigating the impact of freezing on the ALOS PALSAR InSAR phase over Siberian forests. Remote Sens. Lett. 2013, 4, 900–909. [Google Scholar] [CrossRef]
- Chowdhury, T.A.; Thiel, C.; Schmullius, C. Growing stock volume estimation from L-band ALOS PALSAR polarimetric coherence in Siberian forest. Remote Sens. Environ. 2014, 155, 129–144. [Google Scholar] [CrossRef]
- Crippen, R.; Buckley, S.; Agram, P.; Belz, E.; Gurrola, E.; Hensley, S.; Kobrick, M.; Lavalle, M.; Martin, J.; Neumann, M.; et al. Nasadem Global Elevation Model: Methods and Progress. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B4, 125–128. [Google Scholar] [CrossRef]
- Simard, M.; Neumann, M.; Buckley, S. Validation of the New Srtm Digital Elevation Model (Nasadem) with Icesat/Glas over the United States. IEEE Int. Geosci. Remote Sens. Symp. 2016, 3227–3229. [Google Scholar] [CrossRef]
- Wessel, B.; Huber, M.; Wohlfart, C.; Marschalk, U.; Kosmann, D.; Roth, A. Accuracy assessment of the global TanDEM-X Digital Elevation Model with GPS data. ISPRS J. Photogramm. Remote Sens. 2018, 139, 171–182. [Google Scholar] [CrossRef]
- Tansey, K.J.; Luckman, A.J.; Skinner, L.; Balzter, H.; Strozzi, T.; Wagner, W. Classification of forest volume resources using ERS tandem coherence and JERS backscatter data. Int. J. Remote Sens. 2004, 25, 751–768. [Google Scholar] [CrossRef]
- Gens, R.; Van Genderen, J.L. Review Article SAR interferometry—issues, techniques, applications. Int. J. Remote Sens. 1996, 17, 1803–1835. [Google Scholar] [CrossRef]
- Crosetto, M.; Monserrat, O.; Cuevas, M.; Crippa, B. Spaceborne Differential SAR Interferometry: Data Analysis Tools for Deformation Measurement. Remote Sens. 2011, 3, 305–318. [Google Scholar] [CrossRef]
- Le Toan, T.; Quegan, S.; Davidson, M.W.J.; Balzter, H.; Paillou, P.; Papathanassiou, K.; Plummer, S.; Rocca, F.; Saatchi, S.; Shugart, H.; et al. The BIOMASS mission: Mapping global forest biomass to better understand the terrestrial carbon cycle. Remote Sens. Environ. 2011, 115, 2850–2860. [Google Scholar] [CrossRef]
- Quegan, S.; Le Toan, T.; Chave, J.; Dall, J.; Exbrayat, J.-F.; Minh, D.H.T.; Lomas, M.; D’Alessandro, M.M.; Paillou, P.; Papathanassiou, K.; et al. The European Space Agency BIOMASS mission: Measuring forest above-ground biomass from space. Remote Sens. Environ. 2019, 227, 44–60. [Google Scholar] [CrossRef]
- Crosetto, M.; Monserrat, O.; Cuevas-González, M.; Devanthéry, N.; Crippa, B. Persistent Scatterer Interferometry: A review. ISPRS J. Photogramm. Remote Sens. 2016, 115, 78–89. [Google Scholar] [CrossRef]
- Zhong, C.; Liu, Y.; Gao, P.; Chen, W.; Li, H.; Hou, Y.; Nuremanguli, T.; Ma, H. Landslide mapping with remote sensing: Challenges and opportunities. Int. J. Remote Sens. 2020, 41, 1555–1581. [Google Scholar] [CrossRef]
- Solari, L.; Bianchini, S.; Franceschini, R.; Barra, A.; Monserrat, O.; Thuegaz, P.; Bertolo, D.; Crosetto, M.; Catani, F. Satellite interferometric data for landslide intensity evaluation in mountainous regions. Int. J. Appl. Earth Obs. Geoinf. 2020, 87, 102028. [Google Scholar] [CrossRef]
- Dirscherl, M.; Dietz, A.J.; Dech, S.; Kuenzer, C. Remote sensing of ice motion in Antarctica–A review. Remote Sens. Environ. 2020, 237, 111595. [Google Scholar] [CrossRef]
- Salepci, N. Multi-Sensor Synergy For Persistent Scatterer Interferometry Based Ground Subsidence Monitoring, PhD at the Friedrich-Schiller-University of Jena, Chemical-Geoscientific Faculty. 2015. Available online: https://www.db-thueringen.de/receive/dbt_mods_00026315 (accessed on 7 November 2020).
- Höfle, B.; Rutzinger, M. Topographic airborne LiDAR in geomorphology: A technological perspective. Zeitschrift fur Geomorphol. 2011, 55, 1–29. [Google Scholar] [CrossRef]
- Riveiro, B. Laser Scanning; Riveiro, B., Lindenbergh, R., Eds.; CRC Press: London, UK, 2019; ISBN 9781351018869. [Google Scholar] [CrossRef]
- Hudak, A.T.; Lefsky, M.A.; Cohen, W.B.; Berterretche, M. Integration of lidar and Landsat ETM+ data for estimating and mapping forest canopy height. Remote Sens. Environ. 2002, 82, 397–416. [Google Scholar] [CrossRef]
- Hudak, A.T.; Evans, J.S.; Stuart Smith, A.M. LiDAR Utility for Natural Resource Managers. Remote Sens. 2009, 1, 934–951. [Google Scholar] [CrossRef]
- Brodu, N.; Lague, D. 3D terrestrial lidar data classification of complex natural scenes using a multi-scale dimensionality criterion: Applications in geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134. [Google Scholar] [CrossRef]
- Guzzetti, F.; Mondini, A.C.; Cardinali, M.; Fiorucci, F.; Santangelo, M.; Chang, K.-T. Landslide inventory maps: New tools for an old problem. Earth-Science Rev. 2012, 112, 42–66. [Google Scholar] [CrossRef]
- Telling, J.; Lyda, A.; Hartzell, P.; Glennie, C. Review of Earth science research using terrestrial laser scanning. Earth-Science Rev. 2017, 169, 35–68. [Google Scholar] [CrossRef]
- Eltner, A.; Maas, H.; Faust, D. Soil micro-topography change detection at hillslopes in fragile Mediterranean landscapes. Geoderma 2018, 313, 217–232. [Google Scholar] [CrossRef]
- Stysley, P.R.; Coyle, D.B.; Clarke, G.B.; Frese, E.; Blalock, G.; Morey, P.; Kay, R.B.; Poulios, D.; Hersh, M. Laser production for NASA’s Global Ecosystem Dynamics Investigation (GEDI) lidar. Opt. Laser Technol. 2015, 68, 67–72. [Google Scholar] [CrossRef]
- Hancock, S.; Armston, J.; Hofton, M.; Sun, X.; Tang, H.; Duncanson, L.I.; Kellner, J.R.; Dubayah, R. The GEDI simulator: A large-footprint waveform lidar simulator for calibration and validation of spaceborne missions. Earth Sp. Sci. 2019, 6, 2018EA000506. [Google Scholar] [CrossRef]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Margottini, C.; Canuti, P.; Sassa, K. Landslide Science and Practice; Margottini, C., Canuti, P., Sassa, K., Eds.; Springer Berlin Heidelberg: Berlin/Heidelberg, Germany, 2013; ISBN 978-3-642-31444-5. [Google Scholar]
- Tilly, N.; Kelterbaum, D.; Zeese, R. GEOMORPHOLOGICAL MAPPING WITH TERRESTRIAL LASER SCANNING AND UAV-BASED IMAGING. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B5, 591–597. [Google Scholar] [CrossRef]
- RIEGL_miniVUX-1UAV. Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads/RIEGL_miniVUX-1UAV_Datasheet_2020-10-06.pdf (accessed on 8 November 2020).
- Xie, T.; Zhu, J.; Jiang, C.; JIANG, Y.; GUO, W.; WANG, C.; LIU, R. Situation and prospect of light and miniature UAV-borne LiDAR. In Proceedings of the XIV International Conference on Pulsed Lasers and Laser Applications, Tomsk, Russian, 15–20 September 2019; Klimkin, A.V., Tarasenko, V.F., Trigub, M.V., Eds.; SPIE: Tomsk, Russian Federation, 2019; p. 20. [Google Scholar]
- Jeziorska, J. UAS for Wetland Mapping and Hydrological Modeling. Remote Sens. 2019, 11, 1997. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.J.; Keller, M.; Cohen, W.B.; Carabajal, C.C.; Del Bom Espirito-Santo, F.; Hunter, M.O.; de Oliveira, R. Estimates of forest canopy height and aboveground biomass using ICESat. Geophys. Res. Lett. 2005, 32, 1–4. [Google Scholar] [CrossRef]
- Drake, J.B.; Dubayah, R.O.; Clark, D.B.; Knox, R.G.; Blair, J.B.; Hofton, M.A.; Chazdon, R.L.; Weishampel, J.F.; Prince, S. Estimation of tropical forest structural characteristics, using large-footprint lidar. Remote Sens. Environ. 2002, 79, 305–319. [Google Scholar] [CrossRef]
- Duncanson, L.; Neuenschwander, A.; Hancock, S.; Thomas, N.; Fatoyinbo, T.; Simard, M.; Silva, C.A.; Armston, J.; Luthcke, S.B.; Hofton, M.; et al. Biomass estimation from simulated GEDI, ICESat-2 and NISAR across environmental gradients in Sonoma County, California. Remote Sens. Environ. 2020, 242, 111779. [Google Scholar] [CrossRef]
- Vandemark, D.; Tran, N.; Beckley, B.D.; Chapron, B.; Gaspar, P. Direct estimation of sea state impacts on radar altimeter sea level measurements. Geophys. Res. Lett. 2002, 29, 1-1–1-4. [Google Scholar] [CrossRef]
- Hawker, L.; Bates, P.; Neal, J.; Rougier, J. Perspectives on Digital Elevation Model (DEM) Simulation for Flood Modeling in the Absence of a High-Accuracy Open Access Global DEM. Front. Earth Sci. 2018, 6, 233. [Google Scholar] [CrossRef]
- Schwefel, D.; Glässer, C.; Glässer, W. Dynamik anthropogen induzierter Landschaftsveränderungen im Bergbaufolgegebiet Teutschenthal-Bahnhof (Sachsen-Anhalt). Hercynia 2012, 45, 9–31. [Google Scholar]
- Mulder, V.L.; de Bruin, S.; Schaepman, M.E.; Mayr, T.R. The use of remote sensing in soil and terrain mapping — A review. Geoderma 2011, 162, 1–19. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Stereńczak, K.; Modzelewska, A.; Lefsky, M.; Waser, L.T.; Straub, C.; Ghosh, A. Review of studies on tree species classification from remotely sensed data. Remote Sens. Environ. 2016, 186, 64–87. [Google Scholar] [CrossRef]
- Cavender-Bares, J.; Gamon, J.A.; Townsend, P.A. Remote Sensing of Plant Biodiversity; Cavender-Bares, J., Gamon, J.A., Townsend, P.A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; ISBN 978-3-030-33156-6. [Google Scholar]
- Lausch, A.; Erasmi, S.; King, D.J.; Magdon, P.; Heurich, M. Understanding Forest Health with Remote Sensing -Part I—A Review of Spectral Traits, Processes and Remote-Sensing Characteristics. Remote Sens. 2016, 8, 1029. [Google Scholar] [CrossRef]
- Lausch, A.; Erasmi, S.; King, D.; Magdon, P.; Heurich, M. Understanding Forest Health with Remote Sensing-Part II—A Review of Approaches and Data Models. Remote Sens. 2017, 9, 129. [Google Scholar] [CrossRef]
- Wellmann, T.; Haase, D.; Knapp, S.; Salbach, C.; Selsam, P.; Lausch, A. Urban land use intensity assessment: The potential of spatio-temporal spectral traits with remote sensing. Ecol. Indic. 2018, 85, 190–203. [Google Scholar] [CrossRef]
- Haase, D.; Jänicke, C.; Wellmann, T. Front and back yard green analysis with subpixel vegetation fractions from earth observation data in a city. Landsc. Urban Plan. 2019, 182, 44–54. [Google Scholar] [CrossRef]
- Bai, Z.G.; Dent, D.L.; Olsson, L.; Schaepman, M.E. Proxy global assessment of land degradation. Soil Use Manag. 2008, 24, 223–234. [Google Scholar] [CrossRef]
- Borrelli, P.; Robinson, D.A.; Fleischer, L.R.; Lugato, E.; Ballabio, C.; Alewell, C.; Meusburger, K.; Modugno, S.; Schütt, B.; Ferro, V.; et al. An assessment of the global impact of 21st century land use change on soil erosion. Nat. Commun. 2017, 8, 2013. [Google Scholar] [CrossRef]
- Cherlet, M.; Hutchinson, C.; Reynolds, J.; Hill, J.; Sommer, S.; von Maltitz, G. World Atlas of Desertification; Publication Office of the European Union: Luxembourg, 2018. [Google Scholar]
- FAO. Global Land Degradation Information System (GLADIS). Available online: http://www.fao.org/nr/lada/gladis/gladis_db/downl.php (accessed on 17 June 2020).
- BMZ Presseservic. Available online: http://www.bmz.de/de/presse/aktuelleMeldungen/2019/juni/190614_pm_034_Minister-Mueller-zum-Internationalen-Tag-gegen-Wuestenbildung/index.html (accessed on 17 June 2020).
- Webb, N.P.; Kachergis, E.; Miller, S.W.; McCord, S.E.; Bestelmeyer, B.T.; Brown, J.R.; Chappell, A.; Edwards, B.L.; Herrick, J.E.; Karl, J.W.; et al. Indicators and benchmarks for wind erosion monitoring, assessment and management. Ecol. Indic. 2020, 110, 105881. [Google Scholar] [CrossRef]
- Livingstone, I.; Wiggs, G.F.S.; Weaver, C.M. Geomorphology of desert sand dunes: A review of recent progress. Earth-Science Rev. 2007, 80, 239–257. [Google Scholar] [CrossRef]
- Zheng, Z.; Du, S.; Du, S.; Zhang, X. A multiscale approach to delineate dune-field landscape patches. Remote Sens. Environ. 2020, 237, 111591. [Google Scholar] [CrossRef]
- Baughman, C.A.; Jones, B.M.; Bodony, K.L.; Mann, D.H.; Larsen, C.F.; Himelstoss, E.; Smith, J. Remotely Sensing the Morphometrics and Dynamics of a Cold Region Dune Field Using Historical Aerial Photography and Airborne LiDAR Data. Remote Sens. 2018, 10, 792. [Google Scholar] [CrossRef]
- Blumberg, D.G. Analysis of large aeolian (wind-blown) bedforms using the Shuttle Radar Topography Mission (SRTM) digital elevation data. Remote Sens. Environ. 2006, 100, 179–189. [Google Scholar] [CrossRef]
- Al-Masrahy, M.A.; Mountney, N.P. Remote sensing of spatial variability in aeolian dune and interdune morphology in the Rub’ Al-Khali, Saudi Arabia. Aeolian Res. 2013, 11, 155–170. [Google Scholar] [CrossRef]
- Ewing, R.C.; Kocurek, G.; Lake, L.W. Pattern analysis of dune-field parameters. Earth Surf. Process. Landforms 2006, 31, 1176–1191. [Google Scholar] [CrossRef]
- Sharma, P.; Heggy, E.; Farr, T.G. Exploring morphology, layering and formation history of linear terrestrial dunes from radar observations: Implications for Titan. Remote Sens. Environ. 2018, 204, 296–307. [Google Scholar] [CrossRef]
- Liang, P.; Yang, X. Landscape spatial patterns in the Maowusu (Mu Us) Sandy Land, northern China and their impact factors. Catena 2016, 145, 321–333. [Google Scholar] [CrossRef]
- Forman, R.T.T. Ecologically Sustainable Landscapes: The Role of Spatial Configuration. In Changing Landscapes: An Ecological Perspective; Springer: New York, NY, USA, 1990; pp. 261–278. [Google Scholar]
- Lausch, A.; Blaschke, T.; Haase, D.; Herzog, F.; Syrbe, R.-U.; Tischendorf, L.; Walz, U. Understanding and quantifying landscape structure–A review on relevant process characteristics, data models and landscape metrics. Ecol. Modell. 2015, 295, 31–41. [Google Scholar] [CrossRef]
- Brown, D.G.; Arbogast, A.F. Digital Photogrammetric Change Analysis As Applied To Active Coastal Dunes in Michigan. Photogramm. Eng. Remote Sens. 1999, 65, 467–474. [Google Scholar]
- Ding, C.; Zhang, L.; Liao, M.; Feng, G.; Dong, J.; Ao, M.; Yu, Y. Quantifying the spatio-temporal patterns of dune migration near Minqin Oasis in northwestern China with time series of Landsat-8 and Sentinel-2 observations. Remote Sens. Environ. 2020, 236, 111498. [Google Scholar] [CrossRef]
- Dong, P.; Chen, Q. LiDAR Remote Sensing and its Applications; CRC Press: Boca Raton, FL, USA, 2018; ISBN 978-1-4822-4301-7. [Google Scholar] [CrossRef]
- Mitasova, H.; Overton, M.; Harmon, R.S. Geospatial analysis of a coastal sand dune field evolution: Jockey’s Ridge, North Carolina. Geomorphology 2005, 72, 204–221. [Google Scholar] [CrossRef]
- Grohmann, C.H.; Sawakuchi, A.O. Influence of cell size on volume calculation using digital terrain models: A case of coastal dune fields. Geomorphology 2013, 180–181, 130–136. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Levin, N.; Barchyn, T.E.; Baddock, M.C. Remote sensing and spatial analysis of aeolian sand dunes: A review and outlook. Earth-Science Rev. 2012, 111, 319–334. [Google Scholar] [CrossRef]
- Anders, K.; Winiwarter, L.; Lindenbergh, R.; Williams, J.G.; Vos, S.E.; Höfle, B. 4D objects-by-change: Spatiotemporal segmentation of geomorphic surface change from LiDAR time series. ISPRS J. Photogramm. Remote Sens. 2020, 159, 352–363. [Google Scholar] [CrossRef]
- Wyrick, J.R.; Senter, A.E.; Pasternack, G.B. Revealing the natural complexity of fluvial morphology through 2D hydrodynamic delineation of river landforms. Geomorphology 2014, 210, 14–22. [Google Scholar] [CrossRef]
- Gopal Ghosh, K.; Mukhopadhyay, S. Introductory Chapter: Current Practice in Fluvial Geomorphology: Research Frontiers, Issues and Challenges. In Current Practice in Fluvial Geomorphology—Dynamics and Diversity; IntechOpen: London, UK, 2020; pp. 1–8. [Google Scholar]
- Piégay, H.; Arnaud, F.; Belletti, B.; Bertrand, M.; Bizzi, S.; Carbonneau, P.; Dufour, S.; Liébault, F.; Ruiz-Villanueva, V.; Slater, L. Remotely sensed rivers in the Anthropocene: State of the art and prospects. Earth Surf. Process. Landf. 2020, 45, 157–188. [Google Scholar]
- Grimaldi, S.; Xu, J.; Li, Y.; Pauwels, V.R.N.; Walker, J.P. Flood mapping under vegetation using single SAR acquisitions. Remote Sens. Environ. 2020, 237, 111582. [Google Scholar] [CrossRef]
- UNISDR. CRED Summary for Policymakers. In Climate Change 2013—The Physical Science Basis; Intergovernmental Panel on Climate Change, Ed.; Cambridge University Press: Cambridge, UK, 2015; pp. 1–30. ISBN 9788578110796. [Google Scholar]
- Tien Bui, D.; Khosravi, K.; Li, S.; Shahabi, H.; Panahi, M.; Singh, V.; Chapi, K.; Shirzadi, A.; Panahi, S.; Chen, W.; et al. New Hybrids of ANFIS with Several Optimization Algorithms for Flood Susceptibility Modeling. Water 2018, 10, 1210. [Google Scholar] [CrossRef]
- Alfieri, L.; Bisselink, B.; Dottori, F.; Naumann, G.; de Roo, A.; Salamon, P.; Wyser, K.; Feyen, L. Global projections of river flood risk in a warmer world. Earth’s Future 2017, 5, 171–182. [Google Scholar] [CrossRef]
- Marcus, W.A.; Fonstad, M.A. Optical remote mapping of rivers at sub-meter resolutions and watershed extents. Earth Surf. Process. Landf. 2008, 33, 4–24. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Piégay, H. Fluvial Remote Sensing for Science and Management; Carbonneau, P.E., Piégay, H., Eds.; John Wiley & Sons, Ltd: Chichester, UK, 2012; ISBN 9781119940791. [Google Scholar]
- Tomsett, C.; Leyland, J. Remote sensing of river corridors: A review of current trends and future directions. River Res. Appl. 2019, 35, 779–803. [Google Scholar] [CrossRef]
- Entwistle, N.; Heritage, G.; Milan, D. Recent remote sensing applications for hydro and morphodynamic monitoring and modelling. Earth Surf. Process. Landf. 2018, 43, 2283–2291. [Google Scholar] [CrossRef]
- Gläßer, C.; Reinartz, P. Multitemporal and Multispectral Remote Sensing Approach for Flood Detection in the Elbe-Mulde Region 2002. Acta Hydrochim. Hydrobiol. 2005, 33, 395–403. [Google Scholar] [CrossRef]
- Götze, C.; Gläßer, C.; Jung, A. Detecting heavy metal pollution of floodplain vegetation in a pot experiment using reflectance spectroscopy. Int. J. River Basin Manag. 2016, 14, 499–507. [Google Scholar] [CrossRef]
- Riedel, F. Der Einsatz Hyperspektraler Fernerkundungsdaten zur Analyse Schwermetallbedingter Boden- und Pflanzenbelastungen in Einem Auenökosystem unter Besonderer Berücksichtigung der Feinmorphologie.—Dissertation, Universität Halle-Wittenberg, 1-226. 2018. Available online: http://digital.bibliothek.uni-halle.de/hs/content/titleinfo/2923679 (accessed on 7 November 2020).
- Bizzi, S.; Demarchi, L.; Grabowski, R.C.; Weissteiner, C.J. The use of remote sensing to characterise hydromorphological properties of European rivers. Aquat. Sci. 2016, 78, 57–70. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Lee, W.T. The Face of the Earth as Seen from the Air; American Geographical Society: New York, NY, USA, 1922. [Google Scholar]
- Simpson, R.B. RADAR, GEOGRAPHIC TOOL. Ann. Assoc. Am. Geogr. 1966, 56, 80–96. [Google Scholar] [CrossRef]
- Short, N.M.; Blair, R.W. Geomorphology from Space: A Global Overview of Regional Landforms; Scientific and Technical Information Branch, National Aeronautics and Space Administration: Washington, DC, USA, 1986. [Google Scholar]
- Monegaglia, F.; Zolezzi, G.; Güneralp, I.; Henshaw, A.J.; Tubino, M. Automated extraction of meandering river morphodynamics from multitemporal remotely sensed data. Environ. Model. Softw. 2018, 105, 171–186. [Google Scholar] [CrossRef]
- Gupta, N.; Atkinson, P.M.; Carling, P.A. Decadal length changes in the fluvial planform of the River Ganga: Bringing a mega-river to life with Landsat archives. Remote Sens. Lett. 2013, 4, 1–9. [Google Scholar] [CrossRef]
- Schumann, G.J.P.; Domeneghetti, A. Exploiting the proliferation of current and future satellite observations of rivers. Hydrol. Process. 2016, 30, 2891–2896. [Google Scholar] [CrossRef]
- Schumann, G.J.P.; Moller, D.K. Microwave remote sensing of flood inundation. Phys. Chem. Earth 2015, 83–84, 84–95. [Google Scholar] [CrossRef]
- Ghent, E.O. Application of Remote Sensing and Geographical Information Systems in Flood Management: A Review. Res. J. Appl. Sci. Eng. Technol. 2013, 6, 1884–1894. [Google Scholar]
- Teng, J.; Jakeman, A.J.; Vaze, J.; Croke, B.F.W.; Dutta, D.; Kim, S. Flood inundation modelling: A review of methods, recent advances and uncertainty analysis. Environ. Model. Softw. 2017, 90, 201–216. [Google Scholar] [CrossRef]
- Ogashawara, I.; Curtarelli, M.P.; Ferreira, C.M. The Use of Optical Remote Sensing For Mapping Flooded Areas. J. Eng. Res. Appl. 2013, 3, 1956–1960. [Google Scholar]
- Shahabi, H.; Shirzadi, A.; Ghaderi, K.; Omidvar, E.; Al-Ansari, N.; Clague, J.J.; Geertsema, M.; Khosravi, K.; Amini, A.; Bahrami, S.; et al. Flood Detection and Susceptibility Mapping Using Sentinel-1 Remote Sensing Data and a Machine Learning Approach: Hybrid Intelligence of Bagging Ensemble Based on K-Nearest Neighbor Classifier. Remote Sens. 2020, 12, 266. [Google Scholar] [CrossRef]
- Ghoshal, S.; James, L.A.; Singer, M.B.; Aalto, R. Channel and Floodplain Change Analysis over a 100-Year Period: Lower Yuba River, California. Remote Sens. 2010, 2, 1797–1825. [Google Scholar] [CrossRef]
- Creutin, J.D.; Borga, M. Radar hydrology modifies the monitoring of flash-flood hazard. Hydrol. Process. 2003, 17, 1453–1456. [Google Scholar] [CrossRef]
- Costache, R.; Pham, Q.B.; Sharifi, E.; Linh, N.T.T.; Abba, S.I.; Vojtek, M.; Vojteková, J.; Nhi, P.T.T.; Khoi, D.N. Flash-Flood Susceptibility Assessment Using Multi-Criteria Decision Making and Machine Learning Supported by Remote Sensing and GIS Techniques. Remote Sens. 2019, 12, 106. [Google Scholar] [CrossRef]
- Alexandre, C.; Johary, R.; Catry, T.; Mouquet, P.; Révillion, C.; Rakotondraompiana, S.; Pennober, G. A Sentinel-1 Based Processing Chain for Detection of Cyclonic Flood Impacts. Remote Sens. 2020, 12, 252. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, F.; Tian, B.; Liang, D.; Yang, A. Characterization of Kyagar Glacier and Lake Outburst Floods in 2018 Based on Time-Series Sentinel-1A Data. Water 2020, 12, 184. [Google Scholar] [CrossRef]
- San Martín, L.; Morandeira, N.S.; Grimson, R.; Rajngewerc, M.; González, E.B.; Kandus, P. The contribution of ALOS/PALSAR-1 multi-temporal data to map permanently and temporarily flooded coastal wetlands. Int. J. Remote Sens. 2020, 41, 1582–1602. [Google Scholar] [CrossRef]
- Hong Quang, N.; Tuan, V.A.; Thi Thu Hang, L.; Manh Hung, N.; Thi The, D.; Thi Dieu, D.; Duc Anh, N.; Hackney, C.R. Hydrological/Hydraulic Modeling-Based Thresholding of Multi SAR Remote Sensing Data for Flood Monitoring in Regions of the Vietnamese Lower Mekong River Basin. Water 2019, 12, 71. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Melack, J.M.; Dunne, T.; Mertes, L.A.K.; Hess, L.L.; Smith, L.C. Interferometric radar measurements of water level changes on the Amazon flood plain. Nature 2000, 404, 174–177. [Google Scholar] [CrossRef]
- Zeng, Z.; Gan, Y.; Kettner, A.J.; Yang, Q.; Zeng, C.; Brakenridge, G.R.; Hong, Y. Towards high resolution flood monitoring: An integrated methodology using passive microwave brightness temperatures and Sentinel synthetic aperture radar imagery. J. Hydrol. 2020, 582, 124377. [Google Scholar] [CrossRef]
- Wang, Y.; Colby, J.D.; Mulcahy, K.A. An efficient method for mapping flood extent in a coastal floodplain using Landsat TM and DEM data. Int. J. Remote Sens. 2002, 23, 3681–3696. [Google Scholar] [CrossRef]
- Himayoun, D.; Roshni, T. Geomorphic changes in the Jhelum River due to an extreme flood event: A case study. Arab. J. Geosci. 2020, 13, 23. [Google Scholar] [CrossRef]
- Walker, J.J.; Soulard, C.E.; Petrakis, R.E. Integrating stream gage data and Landsat imagery to complete time-series of surface water extents in Central Valley, California. Int. J. Appl. Earth Obs. Geoinf. 2020, 84, 101973. [Google Scholar] [CrossRef]
- Chadburn, S.E.; Burke, E.J.; Cox, P.M.; Friedlingstein, P.; Hugelius, G.; Westermann, S. An observation-based constraint on permafrost loss as a function of global warming. Nat. Clim. Chang. 2017, 7, 340–344. [Google Scholar] [CrossRef]
- Goffi, A.; Stroppiana, D.; Brivio, P.A.; Bordogna, G.; Boschetti, M. Towards an automated approach to map flooded areas from Sentinel-2 MSI data and soft integration of water spectral features. Int. J. Appl. Earth Obs. Geoinf. 2020, 84, 101951. [Google Scholar] [CrossRef]
- Caballero, I.; Ruiz, J.; Navarro, G. Sentinel-2 Satellites Provide Near-Real Time Evaluation of Catastrophic Floods in the West Mediterranean. Water 2019, 11, 2499. [Google Scholar] [CrossRef]
- Sadek, M.; Li, X. Low-Cost Solution for Assessment of Urban Flash Flood Impacts Using Sentinel-2 Satellite Images and Fuzzy Analytic Hierarchy Process: A Case Study of Ras Ghareb City, Egypt. Adv. Civ. Eng. 2019, 2019, 1–15. [Google Scholar] [CrossRef]
- Olivera-Guerra, L.; Merlin, O.; Er-Raki, S. Irrigation retrieval from Landsat optical/thermal data integrated into a crop water balance model: A case study over winter wheat fields in a semi-arid region. Remote Sens. Environ. 2020, 239, 111627. [Google Scholar] [CrossRef]
- Deshpande, S.S. Improved Floodplain Delineation Method Using High-Density LiDAR Data. Comput. Civ. Infrastruct. Eng. 2013, 28, 68–79. [Google Scholar] [CrossRef]
- Webster, T.L.; Forbes, D.L.; Dickie, S.; Shreenan, R. Using topographic lidar to map flood risk from storm-surge events for Charlottetown, Prince Edward Island, Canada. Can. J. Remote Sens. 2004, 30, 64–76. [Google Scholar] [CrossRef]
- Fewtrell, T.J.; Duncan, A.; Sampson, C.C.; Neal, J.C.; Bates, P.D. Benchmarking urban flood models of varying complexity and scale using high resolution terrestrial LiDAR data. Phys. Chem. Earth 2011, 36, 281–291. [Google Scholar] [CrossRef]
- Breili, K.; Simpson, M.J.R.; Klokkervold, E.; Roaldsdotter Ravndal, O. High-accuracy coastal flood mapping for Norway using lidar data. Nat. Hazards Earth Syst. Sci. 2020, 20, 673–694. [Google Scholar] [CrossRef]
- Stoleriu, C.C.; Urzica, A.; Mihu-Pintilie, A. Improving flood risk map accuracy using high-density LiDAR data and the HEC-RAS river analysis system: A case study from north-eastern Romania. J. Flood Risk Manag. 2019, 13, 1–17. [Google Scholar] [CrossRef]
- Mihu-Pintilie, A.; Cîmpianu, C.I.; Stoleriu, C.C.; Pérez, M.N.; Paveluc, L.E. Using high-density LiDAR data and 2D streamflow hydraulic modeling to improve urban flood hazard maps: A HEC-RAS multi-scenario approach. Water 2019, 11, 1832. [Google Scholar] [CrossRef]
- Jerome Morrissey, P.; McCormack, T.; Naughton, O.; Meredith Johnston, P.; William Gill, L. Modelling groundwater flooding in a lowland karst catchment. J. Hydrol. 2020, 580, 124361. [Google Scholar] [CrossRef]
- Raber, G.T.; Jensen, J.R.; Hodgson, M.E.; Tullis, J.A.; Davis, B.A.; Berglund, J. Impact of lidar nominal post-spacing on DEM accuracy and flood zone delineation. Photogramm. Eng. Remote Sensing 2007, 73, 793–804. [Google Scholar] [CrossRef]
- Imam, R.; Pini, M.; Marucco, G.; Dominici, F.; Dovis, F. UAV-Based GNSS-R for Water Detection as a Support to Flood Monitoring Operations: A Feasibility Study. Appl. Sci. 2019, 10, 210. [Google Scholar] [CrossRef]
- Bandini, F.; Sunding, T.P.; Linde, J.; Smith, O.; Jensen, I.K.; Köppl, C.J.; Butts, M.; Bauer-Gottwein, P. Unmanned Aerial System (UAS) observations of water surface elevation in a small stream: Comparison of radar altimetry, LIDAR and photogrammetry techniques. Remote Sens. Environ. 2020, 237, 111487. [Google Scholar] [CrossRef]
- Ielpi, A.; Lapôtre, M.G.A. A tenfold slowdown in river meander migration driven by plant life. Nat. Geosci. 2020, 13, 82–86. [Google Scholar] [CrossRef]
- Mertes, L.A.K.; Daniel, D.L.; Melack, J.M.; Nelson, B.; Martinelli, L.A.; Forsberg, B.R. Spatial patterns of hydrology, geomorphology, and vegetation on the floodplain of the Amazon river in Brazil from a remote sensing perspective. Geomorphology 1995, 13, 215–232. [Google Scholar] [CrossRef]
- Finotello, A.; D’Alpaos, A.; Bogoni, M.; Ghinassi, M.; Lanzoni, S. Remotely-sensed planform morphologies reveal fluvial and tidal nature of meandering channels. Sci. Rep. 2020, 10, 1–13. [Google Scholar] [CrossRef]
- Garofalo, D. The Influence of Wetland Vegetation on Tidal Stream Channel Migration and Morphology. Estuaries 1980, 3, 258. [Google Scholar] [CrossRef]
- Dépret, T.; Riquier, J.; Piégay, H. Evolution of abandoned channels: Insights on controlling factors in a multi-pressure river system. Geomorphology 2017, 294, 99–118. [Google Scholar] [CrossRef]
- Yang, X.; Damen, M.C.J.; Van Zuidam, R.A. Satellite remote sensing and GIS for the analysis of channel migration changes in the active Yellow River Delta, China. ITC J. 1999, 1, 146–157. [Google Scholar] [CrossRef]
- Peixoto, J.M.A.; Nelson, B.W.; Wittmann, F. Spatial and temporal dynamics of river channel migration and vegetation in central Amazonian white-water floodplains by remote-sensing techniques. Remote Sens. Environ. 2009, 113, 2258–2266. [Google Scholar] [CrossRef]
- Yang, C.; Cai, X.; Wang, X.; Yan, R.; Zhang, T.; Zhang, Q.; Lu, X. Remotely sensed trajectory analysis of channel migration in Lower Jingjiang Reach during the period of 1983-2013. Remote Sens. 2015, 7, 16241–16256. [Google Scholar] [CrossRef]
- Wen, Z.; Yang, H.; Zhang, C.; Shao, G.; Wu, S. Remotely Sensed Mid-Channel Bar Dynamics in Downstream of the Three Gorges Dam, China. Remote Sens. 2020, 12, 409. [Google Scholar] [CrossRef]
- Thomas, J.; Kumar, S.; Sudheer, K.P. Channel stability assessment in the lower reaches of the Krishna River (India) using multi-temporal satellite data during 1973–2015. Remote Sens. Appl. Soc. Environ. 2020, 17, 100274. [Google Scholar] [CrossRef]
- Naito, K.; Parker, G. Can Bankfull Discharge and Bankfull Channel Characteristics of an Alluvial Meandering River be Cospecified From a Flow Duration Curve? J. Geophys. Res. Earth Surf. 2019, 124, 2381–2401. [Google Scholar] [CrossRef]
- Bhaskar, A.S.; Kumar, R.B.B. Remote sensing of coastal geomorphology to understand river migration in the Thengapatnam area, southern India. Int. J. Remote Sens. 2011, 32, 5287–5301. [Google Scholar] [CrossRef]
- Ielpi, A.; Lapôtre, M.G.A.; Finotello, A.; Ghinassi, M.; D’Alpaos, A. Channel mobility drives a diverse stratigraphic architecture in the dryland Mojave River (California, USA). Earth Surf. Process. Landf. 2020, 45, 1717–1731. [Google Scholar] [CrossRef]
- Lorenz, R.D.; Lopes, R.M.; Paganelli, F.; Lunine, J.I.; Kirk, R.L.; Mitchell, K.L.; Soderblom, L.A.; Stofan, E.R.; Ori, G.; Myers, M.; et al. Fluvial channels on Titan: Initial Cassini RADAR observations. Planet. Space Sci. 2008, 56, 1132–1144. [Google Scholar] [CrossRef]
- Zakharova, E.; Nielsen, K.; Kamenev, G.; Kouraev, A. River discharge estimation from radar altimetry: Assessment of satellite performance, river scales and methods. J. Hydrol. 2020, 583, 124561. [Google Scholar] [CrossRef]
- Tarpanelli, A.; Brocca, L.; Barbetta, S.; Faruolo, M.; Lacava, T.; Moramarco, T. Coupling MODIS and Radar Altimetry Data for Discharge Estimation in Poorly Gauged River Basins. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 141–148. [Google Scholar] [CrossRef]
- Smith, L.C.; Pavelsky, T.M. Estimation of river discharge, propagation speed, and hydraulic geometry from space: Lena River, Siberia. Water Resour. Res. 2008, 44, 1–11. [Google Scholar] [CrossRef]
- Tourian, M.J.; Sneeuw, N.; Bárdossy, A. A quantile function approach to discharge estimation from satellite altimetry (ENVISAT). Water Resour. Res. 2013, 49, 4174–4186. [Google Scholar] [CrossRef]
- Duró, G.; Crosato, A.; Kleinhans, M.G.; Uijttewaal, W.S.J. Bank erosion processes measured with UAV-SfM along complex banklines of a straight mid-sized river reach. Earth Surf. Dyn. 2018, 6, 933–953. [Google Scholar] [CrossRef]
- Micheli, E.R.; Kirchner, J.W. Effects of wet meadow riparian vegetation on streambank erosion. 1. Remote sensing measurements of streambank migration and erodibility. Earth Surf. Process. Landf. 2002, 27, 627–639. [Google Scholar] [CrossRef]
- Heeren, D.M.; Mittelstet, A.R.; Fox, G.A.; Storm, D.E.; Al-Madhhachi, A.T.; Midgley, T.L.; Stringer, A.F.; Stunkel, K.B.; Tejral, R.D. Using Rapid Geomorphic Assessments to Assess Streambank Stability in Oklahoma Ozark Streams. Trans. ASABE 2012, 55, 957–968. [Google Scholar] [CrossRef]
- Johansen, K.; Grove, J.; Denham, R.; Phinn, S. Assessing stream bank condition using airborne LiDAR and high spatial resolution image data in temperate semirural areas in Victoria, Australia. J. Appl. Remote Sens. 2013, 7, 073492. [Google Scholar] [CrossRef]
- Resop, J.P.; Lehmann, L.; Hession, W.C. Drone Laser Scanning for Modeling Riverscape Topography and Vegetation: Comparison with Traditional Aerial Lidar. Drones 2019, 3, 35. [Google Scholar] [CrossRef]
- Hamshaw, S.D.; Bryce, T.; Rizzo, D.M.; O’Neil-Dunne, J.; Frolik, J.; Dewoolkar, M.M. Quantifying streambank movement and topography using unmanned aircraft system photogrammetry with comparison to terrestrial laser scanning. River Res. Appl. 2017, 33, 1354–1367. [Google Scholar] [CrossRef]
- Meinen, B.U.; Robinson, D.T. Streambank topography: An accuracy assessment of UAV-based and traditional 3D reconstructions. Int. J. Remote Sens. 2020, 41, 1–18. [Google Scholar] [CrossRef]
- Dürr, H.H.; Laruelle, G.G.; van Kempen, C.M.; Slomp, C.P.; Meybeck, M.; Middelkoop, H. Worldwide Typology of Nearshore Coastal Systems: Defining the Estuarine Filter of River Inputs to the Oceans. Estuaries Coasts 2011, 34, 441–458. [Google Scholar] [CrossRef]
- Vousdoukas, M.I.; Ranasinghe, R.; Mentaschi, L.; Plomaritis, T.A.; Athanasiou, P.; Luijendijk, A.; Feyen, L. Sandy coastlines under threat of erosion. Nat. Clim. Chang. 2020, 10, 260–263. [Google Scholar] [CrossRef]
- Boak, E.H.; Turner, I.L. Shoreline Definition and Detection: A Review. J. Coast. Res. 2005, 214, 688–703. [Google Scholar] [CrossRef]
- Allen, T.; Wang, Y. Selected Scientific Analyses and Practical Applications of Remote Sensing. In Manual of Geospatial Science and Technology, Second Edition; CRC Press: Boca Raton, FL, USA, 2010; pp. 467–485. [Google Scholar]
- Green, E.P.; Mumby, P.J.; Edwards, A.J.; Clark, C.D. Remote Sensing Handbook for Tropical Coastal Management; UNESCO: Paris, France, 2000; ISBN 9231037366. [Google Scholar]
- Klemas, V.V. Coastal and Environmental Remote Sensing from Unmanned Aerial Vehicles: An Overview. J. Coast. Res. 2015, 315, 1260–1267. [Google Scholar] [CrossRef]
- Moore, L.J.; Griggs, G.B. Long-term cliff retreat and erosion hotspots along the central shores of the Monterey Bay National Marine Sanctuary. Mar. Geol. 2002, 181, 265–283. [Google Scholar] [CrossRef]
- Kanwal, S.; Ding, X.; Sajjad, M.; Abbas, S. Three Decades of Coastal Changes in Sindh, Pakistan (1989–2018): A Geospatial Assessment. Remote Sens. 2019, 12, 8. [Google Scholar] [CrossRef]
- Ford, M.R.; Dickson, M.E. Detecting ebb-tidal delta migration using Landsat imagery. Mar. Geol. 2018, 405, 38–46. [Google Scholar] [CrossRef]
- Gong, Z.; Wang, Q.; Guan, H.; Zhou, D.; Zhang, L.; Jing, R.; Wang, X.; Li, Z. Extracting tidal creek features in a heterogeneous background using Sentinel-2 imagery: A case study in the Yellow River Delta, China. Int. J. Remote Sens. 2020, 41, 3653–3676. [Google Scholar] [CrossRef]
- Kawakubo, F.S.; Morato, R.G.; Nader, R.S.; Luchiari, A. Mapping changes in coastline geomorphic features using Landsat TM and ETM+ imagery: Examples in southeastern Brazil. Int. J. Remote Sens. 2011, 32, 2547–2562. [Google Scholar] [CrossRef]
- Gens, R. Remote sensing of coastlines: Detection, extraction and monitoring. Int. J. Remote Sens. 2010, 31, 1819–1836. [Google Scholar] [CrossRef]
- Marghany, M.; Sabu, Z.; Hashim, M. Mapping coastal geomorphology changes using synthetic aperture radar data. Int. J. Phys. Sci. 2010, 5, 1890–1896. [Google Scholar]
- Shu, Y.; Li, J.; Gomes, G. Shoreline Extraction from RADARSAT-2 Intensity Imagery Using a Narrow Band Level Set Segmentation Approach. Mar. Geod. 2010, 33, 187–203. [Google Scholar] [CrossRef]
- Brock, J.C.; Wright, C.W.; Sallenger, A.H.; Krabill, W.B.; Swift, R.N. Basis and methods of NASA Airborne Topographic Mapper lidar surveys for coastal studies. J. Coast. Res. 2002, 18, 1–13. [Google Scholar]
- Database, C. Available online: http://database.eohandbook.com/index.aspx (accessed on 22 September 2020).
- Müller, F.; Hoffmann-Kroll, R.; Wiggering, H. Indicating ecosystem integrity — theoretical concepts and environmental requirements. Ecol. Modell. 2000, 130, 13–23. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, P.; He, Y.; Peng, Z. River detection based on feature fusion from synthetic aperture radar images. J. Appl. Remote Sens. 2020, 14, 1. [Google Scholar] [CrossRef]
- Emery, C.M.; Paris, A.; Biancamaria, S.; Boone, A.; Calmant, S.; Garambois, P.-A.; Santos da Silva, J. Large-scale hydrological model river storage and discharge correction using a satellite altimetry-based discharge product. Hydrol. Earth Syst. Sci. 2018, 22, 2135–2162. [Google Scholar] [CrossRef]
- Domeneghetti, A. On the use of SRTM and altimetry data for flood modeling in data-sparse regions. Water Resour. Res. 2016, 52, 2901–2918. [Google Scholar] [CrossRef]
- Tadono, T.; Ishida, H.; Oda, F.; Naito, S.; Minakawa, K.; Iwamoto, H. Precise Global DEM Generation by ALOS PRISM. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, II-4, 71–76. [Google Scholar] [CrossRef]
- DEM, G. Available online: https://insitu.copernicus.eu/library/reports/OverviewofGlobalDEM_i0r7.pdf (accessed on 17 June 2020).
- ASTER GDEM V3. Available online: https://lpdaac.usgs.gov/documents/434/ASTGTM_User_Guide_V3.pdf (accessed on 17 June 2020).
- Rizzoli, P.; Martone, M.; Gonzalez, C.; Wecklich, C.; Borla Tridon, D.; Bräutigam, B.; Bachmann, M.; Schulze, D.; Fritz, T.; Huber, M.; et al. Generation and performance assessment of the global TanDEM-X digital elevation model. ISPRS J. Photogramm. Remote Sens. 2017, 132, 119–139. [Google Scholar] [CrossRef]
- Hawker, L.; Neal, J.; Bates, P. Accuracy assessment of the TanDEM-X 90 Digital Elevation Model for selected floodplain sites. Remote Sens. Environ. 2019, 232, 111319. [Google Scholar] [CrossRef]
- O’Loughlin, F.E.; Paiva, R.C.D.; Durand, M.; Alsdorf, D.E.; Bates, P.D. A multi-sensor approach towards a global vegetation corrected SRTM DEM product. Remote Sens. Environ. 2016, 182, 49–59. [Google Scholar] [CrossRef]
- Robinson, N.; Regetz, J.; Guralnick, R.P. EarthEnv-DEM90: A nearly-global, void-free, multi-scale smoothed, 90m digital elevation model from fused ASTER and SRTM data. ISPRS J. Photogramm. Remote Sens. 2014, 87, 57–67. [Google Scholar] [CrossRef]
- Danielson, J.J.; Gesch, D.B. Global Multi-Resolution Terrain Elevation Data 2010 (GMTED2010), USGS. 2011. Available online: https://pubs.usgs.gov/of/2011/1073/ (accessed on 7 November 2020).
- Yamazaki, D.; Ikeshima, D.; Tawatari, R.; Yamaguchi, T.; O’Loughlin, F.; Neal, J.C.; Sampson, C.C.; Kanae, S.; Bates, P.D. A high-accuracy map of global terrain elevations. Geophys. Res. Lett. 2017, 44, 5844–5853. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, RG2004. [Google Scholar] [CrossRef]
- DIGITAL ELEVATION DATA. Available online: http://www.viewfinderpanoramas.org/dem3.html (accessed on 17 June 2020).
- Takaku, J.; Tadono, T. Quality updates of ‘AW3D’ global DSM generated from ALOS PRISM. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; IEEE. pp. 5666–5669. [Google Scholar]
- Tadono, T.; Takaku, J.; Tsutsui, K.; Oda, F.; Nagai, H. Status of “ALOS World 3D (AW3D)” global DSM generation. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; IEEE. pp. 3822–3825. [Google Scholar]
- Planetobserver. Available online: https://www.planetobserver.com/products/planetdem/planetdem-30/ (accessed on 17 June 2020).
- NEXTMap® Elevation Data Suite. Available online: https://www.intermap.com/data/nextmap (accessed on 17 June 2020).
- Habib, A.; Kim, E.M.; Morgan, M.; Couloigner, I. DEM Generation from High Resolution Satellite Imagery. Photogramm. Fernerkundung Geoinf. 2013, 2013, 483–493. [Google Scholar]
- Nikolakopoulos, K.G.; Kamaratakis, E.K.; Chrysoulakis, N. SRTM vs ASTER elevation products. Comparison for two regions in Crete, Greece. Int. J. Remote Sens. 2006, 27, 4819–4838. [Google Scholar] [CrossRef]
- Jacobsen, K. Digital Surface Models of City Areas by Very High Resolution Space Imagery. 2006. Available online: https://www.ipi.uni-hannover.de/fileadmin/ipi/publications/City_model_jac.pdf (accessed on 7 November 2020).
- Toutin, T. Generation of DSMs from SPOT-5 in-track HRS and across-track HRG stereo data using spatiotriangulation and autocalibration. ISPRS J. Photogramm. Remote Sens. 2006, 60, 170–181. [Google Scholar] [CrossRef]
- Toutin, T. Comparison of 3D Physical and Empirical Models for Generating DSMs from Stereo HR Images. Photogramm. Eng. Remote Sens. 2006, 72, 597–604. [Google Scholar] [CrossRef]
- Zhang, L.; Gruen, A. Multi-image matching for DSM generation from IKONOS imagery. ISPRS J. Photogramm. Remote Sens. 2006, 60, 195–211. [Google Scholar] [CrossRef]
- Buyuksalih, G.; Jacobsen, K. Digital surface models in build up areas based on very high resolution space images. Am. Soc. Photogramm. Remote Sens. ASPRS Annu. Conf. 2007 Identifying Geospatial Solut. 2007, 1, 118–125. [Google Scholar]
- Alobeid, A.; Jacobsen, K. Automatic generation of digital surface models from IKONOS stereo imagery and related application. In Proceedings of the GORS 16th International Symposium, Damascus, Syria, 10 November 2008. [Google Scholar]
- Crespi, M.; Capaldo, P.; Fratarcangeli, F.; Nascetti, A.; Pieralice, F. DSM generation from very high optical and radar sensors: Problems and potentialities along the road from the 3D geometric modeling to the Surface Model. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; IEEE. pp. 3596–3599. [Google Scholar]
- Capaldo, P.; Crespi, M.; Fratarcangeli, F.; Nascetti, A.; Pieralic, F.; Agugiaro, G.; Poli, D.; Remondino, F. DSM generation from optical and SAR high resolution satellite imagery: Methodology, problems and potentialities. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; IEEE. 2012; pp. 6936–6939. [Google Scholar]
- Gong, K.; Fritsch, D. A detailed study about digital surface model generation using high resolution satellite stereo imagery. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-1, 69–76. [Google Scholar] [CrossRef]
- Yu, M.; Huang, Y.; Xu, Q.; Guo, P.; Dai, Z. Application of virtual earth in 3D terrain modeling to visual analysis of large-scale geological disasters in mountainous areas. Environ. Earth Sci. 2016, 75, 563. [Google Scholar] [CrossRef]
- Huang, Y.; Yu, M.; Xu, Q.; Sawada, K.; Moriguchi, S.; Yashima, A.; Liu, C.; Xue, L. InSAR-derived digital elevation models for terrain change analysis of earthquake-triggered flow-like landslides based on ALOS/PALSAR imagery. Environ. Earth Sci. 2015, 73, 7661–7668. [Google Scholar] [CrossRef]
- Purinton, B.; Bookhagen, B. Validation of digital elevation models (DEMs) and comparison of geomorphic metrics on the southern Central Andean Plateau. Earth Surf. Dyn. 2017, 5, 211–237. [Google Scholar] [CrossRef]
- Vassilaki, D.I.; Stamos, A.A. TanDEM-X DEM: Comparative performance review employing LIDAR data and DSMs. ISPRS J. Photogramm. Remote Sens. 2020, 160, 33–50. [Google Scholar] [CrossRef]
- Zink, M.; Fiedler, H.; Hajnsek, I.; Krieger, G.; Moreira, A.; Werner, M. The TanDEM-X Mission Concept. In Proceedings of the 2006 IEEE International Symposium on Geoscience and Remote Sensing, Denver, CO, USA, 31 July–4 August 2006; IEEE. pp. 1938–1941. [Google Scholar]
- Potin, P.; Rosich, B.; Roeder, J.; Bargellini, P. Sentinel-1 Mission operations concept. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, IEEE. 13–18 July 2014; pp. 1465–1468. [Google Scholar]
- Rosenqvist, A.; Shimada, M.; Ito, N.; Watanabe, M. ALOS PALSAR: A pathfinder mission for global-scale monitoring of the environment. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3307–3316. [Google Scholar] [CrossRef]
- Kankaku, Y.; Suzuki, S.; OSAWA, Y. ALOS-2 mission and development status. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, Australia, 21–26 July 2013; IEEE. pp. 2396–2399. [Google Scholar]
- Hirano, A.; Welch, R.; Lang, H. Mapping from ASTER stereo image data: DEM validation and accuracy assessment. ISPRS J. Photogramm. Remote Sens. 2003, 57, 356–370. [Google Scholar] [CrossRef]
- Takaku, J.; Tadono, T. High resolution DSM generation from ALOS PRISM-mosaic dataset. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; IEEE. pp. 2687–2690. [Google Scholar]
- Schutz, B.E.; Zwally, H.J.; Shuman, C.A.; Hancock, D.; DiMarzio, J.P. Overview of the ICESat mission. Geophys. Res. Lett. 2005, 32, 1–4. [Google Scholar] [CrossRef]
- Le Roy, Y.; Deschaux-Beaume, M. SRAL, A RADAR ALTIME TER DESIGNED TO MEAS URE A WIDE RANGE OF SURFACE TY PES Thales Alenia Space, 26 avenue Jean -François Champollion–31037 Toulouse Cedex 1 ( France ) * Presenting author ( E -mail: yves.le-roy@thalesaleniaspace.com ) European Space. Power 2009, 1, 445–448. [Google Scholar]
- Reigber, A.; Horn, R.; Nottensteiner, A.; Prats, P.; Scheiber, R.; Bethke, K.; Baumgartner, S. Current status of DLR’s new F-SAR sensor. Eusar 2010, 1078–1081. [Google Scholar]
- Donnellan, A.; Parker, J.; Hensley, S.; Pierce, M.; Wang, J.; Rundle, J. UAVSAR observations of triggered slip on the Imperial, Superstition Hills, and East Elmore Ranch Faults associated with the 2010 M 7.2 El Mayor-Cucapah earthquake. Geochem. Geophys. Geosyst. 2014, 15, 815–829. [Google Scholar] [CrossRef]
- Shiroma, G.H.; de Macedo, K.A.; Wimmer, C.; Fernandes, D.; Barreto, T.L. Combining dual-band capability and PolInSAR technique for forest ground and canopy estimation. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 4592–4595. [Google Scholar]
- Shimada, M.; Kawano, N.; Watanabe, M.; Motooka, T.; Ohki, M. Calibration and validation of the Pi-SAR-L2. In Proceedings of the Proc. of APSAR 2013, Tsukuba, Japan, 23–27 September 2013; pp. 194–197. [Google Scholar]
- Leica DMC III Luftbild-Digitalkamera. 2018. Available online: https://leica-geosystems.com/de-de/products/airborne-systems/imaging-sensors/leica-dmciii (accessed on 30 January 2018).
- Leica ADS40 Large-Scale Digital Imagery. 2004. Available online: http://www.dlr.de/os/en/Portaldata/48/Resources/dokumente/ads40_flyer_leica.pdf (accessed on 30 January 2018).
- Systems, Q. Airborne LiDAR. 2018. Available online: https://www.quantum-systems.com/download/31626/ (accessed on 30 January 2018).
- DJI Phantom 4 Pro Specs. 2018. Available online: https://www.dji.com/phantom-4-pro/info#specs (accessed on 30 January 2018).
- Riegl VUX-1UAV. 2018. Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads/RIEGL_VUX-1UAV_Datasheet_2017-09-01.pdf (accessed on 30 January 2018).
- Nurminen, K.; Litkey, P.; Honkavaara, E.; Vastaranta, M.; Holopainen, M.; Lyytikäinen-Saarenmaa, P.; Kantola, T.; Lyytikäinen, M. Automation aspects for the georeferencing of photogrammetric aerial image archives in forested scenes. Remote Sens. 2015, 7, 1565–1593. [Google Scholar] [CrossRef]
- Cigna, F.; Lasaponara, R.; Masini, N.; Milillo, P.; Tapete, D. Persistent scatterer interferometry processing of COSMO-skymed stripmap HIMAGE time series to depict deformation of the historic centre of Rome, Italy. Remote Sens. 2014, 6, 12593–12618. [Google Scholar] [CrossRef]
- Wegmüller, U.; Walter, D.; Spreckels, V.; Werner, C. Evaluation of TerraSAR-X DINSAR and IPTA for ground motion monitoring. In Proceedings of the 3rd TerraSAR-X Science Team Meeting, DLR, Oberpfaffenhofen, Germany, 25–26 November 2008; pp. 25–26. [Google Scholar]
- Wang, L.; Marzahn, P.; Bernier, M.; Jacome, A.; Poulin, J.; Ludwig, R. Comparison of TerraSAR-X and ALOS PALSAR Differential Interferometry with Multisource DEMs for Monitoring Ground Displacement in a Discontinuous Permafrost Region. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4074–4093. [Google Scholar] [CrossRef]
- Pepe, A.; Sansosti, E.; Berardino, P. RLanari On the Generation of {ERS/ENVISAT} {DInSAR}Time-Series Via the {SBAS} Technique. Geosci. Remote Sens. Lett. 2005, 2, 265–269. [Google Scholar] [CrossRef]
- Goel, K.; Adam, N.; Shau, R.; Rodriguez-Gonzalez, F. Improving the reference network in wide-area Persistent Scatterer Interferometry for non-urban areas. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; IEEE. pp. 1448–1451. [Google Scholar]
- Shanker, P.; Casu, F.; Zebker, H.A.; Lanari, R. Comparison of persistent scatterers and small baseline time-series InSAR results: A case study of the San Francisco bay area. IEEE Geosci. Remote Sens. Lett. 2011, 8, 592–596. [Google Scholar] [CrossRef]
- Khan, S.D.; Huang, Z.; Karacay, A. Study of ground subsidence in northwest Harris county using GPS, LiDAR, and InSAR techniques. Nat. Hazards 2014, 73, 1143–1173. [Google Scholar] [CrossRef]
- Feng, G.; Ding, X.; Li, Z.; Mi, J.; Zhang, L.; Omura, M. Calibration of an insar-derived coseimic deformation map associated with the 2011 mw-9.0 tohoku-oki earthquake. IEEE Geosci. Remote Sens. Lett. 2012, 9, 302–306. [Google Scholar] [CrossRef]
- De Luca, C.; Bonano, M.; Casu, F.; Fusco, A.; Lanari, R.; Manunta, M.; Manzo, M.; Pepe, A.; Zinno, I. Automatic and Systematic Sentinel-1 SBAS-DInSAR Processing Chain for Deformation Time-series Generation. Procedia Comput. Sci. 2016, 100, 1176–1180. [Google Scholar] [CrossRef]
- Navarro-Sanchez, V.D.; Lopez-Sanchez, J.M.; Ferro-Famil, L. Polarimetric approaches for persistent scatterers interferometry. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1667–1676. [Google Scholar] [CrossRef]
- Czarnogorska, M.; Samsonov, S.; White, D.; Decker, V. Ground deformation at the Aquistore CO2 storage site in Saskatchewan (Canada) measured by RADARSAT-2 DInSAR. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; IEEE. pp. 445–447. [Google Scholar]
- Natsuaki, R.; Nagai, H.; Motohka, T.; Ohki, M.; Watanabe, M.; Thapa, R.B.; Tadono, T.; Shimada, M.; Suzuki, S. SAR interferometry using ALOS-2 PALSAR-2 data for the Mw 7.8 Gorkha, Nepal earthquake. Earth Planets Sp. 2016, 68, 15. [Google Scholar] [CrossRef]
- Montenbruck, O.; Allende-Alba, G.; Rosello, J.; Tossaint, M.; Zangerl, F. Precise Orbit and Baseline Determination for the SAOCOM-CS Bistatic Radar Mission. Navigation 2018, 65, 15–24. [Google Scholar] [CrossRef]
- Optech ALTM Gemini–Your Base Mapping Solution. 2008. Available online: http://airsensing.com/wp-content/uploads/2014/11 (accessed on 7 November 2020).
- Imakiire, T.; Koarai, M. Wide-area land subsidence caused by “the 2011 off the Pacific Coast of Tohoku Earthquake”. Soils Found. 2012, 52, 842–855. [Google Scholar] [CrossRef]
- Suh, J.; Choi, Y. Mapping hazardous mining-induced sinkhole subsidence using unmanned aerial vehicle (drone) photogrammetry. Environ. Earth Sci. 2017, 76, 144. [Google Scholar] [CrossRef]
- Gasperini, D.; Allemand, P.; Delacourt, C.; Grandjean, P. Potential and limitation of UAV for monitoring subsidence in municipal landfills. Int. J. Environ. Technol. Manag. 2014, 17, 1. [Google Scholar] [CrossRef]
- Weiss, D.J.; Walsh, S.J. Remote Sensing of Mountain Environments. Geogr. Compass 2009, 3, 1–21. [Google Scholar] [CrossRef]
- Farmakis-Serebryakova, M.; Hurni, L. Comparison of Relief Shading Techniques Applied to Landforms. ISPRS Int. J. Geo-Inf. 2020, 9, 253. [Google Scholar] [CrossRef]
- Meybeck, M.; Green, P.; Vörösmarty, C. A New Typology for Mountains and Other Relief Classes. Mt. Res. Dev. 2001, 21, 34–45. [Google Scholar] [CrossRef]
- Ganci, G.; Cappello, A.; Bilotta, G.; Del Negro, C. How the variety of satellite remote sensing data over volcanoes can assist hazard monitoring efforts: The 2011 eruption of Nabro volcano. Remote Sens. Environ. 2020, 236, 111426. [Google Scholar] [CrossRef]
- Calvari, S.; Ganci, G.; Victória, S.; Hernandez, P.; Perez, N.; Barrancos, J.; Alfama, V.; Dionis, S.; Cabral, J.; Cardoso, N.; et al. Satellite and Ground Remote Sensing Techniques to Trace the Hidden Growth of a Lava Flow Field: The 2014–2015 Effusive Eruption at Fogo Volcano (Cape Verde). Remote Sens. 2018, 10, 1115. [Google Scholar] [CrossRef]
- Ganci, G.; James, M.R.; Calvari, S.; Negro, C. Del Separating the thermal fingerprints of lava flows and simultaneous lava fountaining using ground-based thermal camera and SEVIRI measurements. Geophys. Res. Lett. 2013, 40, 5058–5063. [Google Scholar] [CrossRef]
- Casagli, N.; Frodella, W.; Morelli, S.; Tofani, V.; Ciampalini, A.; Intrieri, E.; Raspini, F.; Rossi, G.; Tanteri, L.; Lu, P. Spaceborne, UAV and ground-based remote sensing techniques for landslide mapping, monitoring and early warning. Geoenvironmental Disasters 2017, 4, 9. [Google Scholar] [CrossRef]
- van der Meer, F.; Hecker, C.; van Ruitenbeek, F.; van der Werff, H.; de Wijkerslooth, C.; Wechsler, C. Geologic remote sensing for geothermal exploration: A review. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 255–269. [Google Scholar] [CrossRef]
- Liang, G.; Xiao, K.; Zheng, H.; Zhao, W.; Zhang, Q.; Gao, C. Rockfall monitoring based on multichannel synthetic aperture radar. Vibroengineering Procedia 2019, 22, 146–152. [Google Scholar]
- Cabré, A.; Remy, D.; Aguilar, G.; Carretier, S.; Riquelme, R. Mapping rainstorm erosion associated with an individual storm from InSAR coherence loss validated by field evidence for the Atacama Desert. Earth Surf. Process. Landf. 2020, 45, 2091–2106. [Google Scholar]
- Caviezel, A.; Gerber, W. Brief Communication: Measuring rock decelerations and rotation changes during short-duration ground impacts. Nat. Hazards Earth Syst. Sci. 2018, 18, 3145–3151. [Google Scholar] [CrossRef]
- Fanos, A.M.; Pradhan, B.; Alamri, A.; Lee, C.W. Machine Learning-Based and 3D Kinematic Models for Rockfall Hazard Assessment Using LiDAR Data and GIS. Remote Sens. 2020, 12, 1755. [Google Scholar] [CrossRef]
- Lato, M.J.; Anderson, S.; Porter, M.J. Reducing Landslide Risk Using Airborne Lidar Scanning Data. J. Geotech. Geoenvironmental Eng. 2019, 145, 06019004. [Google Scholar] [CrossRef]
- Liu, H.; Wang, X.; Liao, X.; Sun, J.; Zhang, S. Rockfall Investigation and Hazard Assessment from Nang County to Jiacha County in Tibet. Appl. Sci. 2019, 10, 247. [Google Scholar] [CrossRef]
- Caviezel, A.; Demmel, S.E.; Ringenbach, A.; Bühler, Y.; Lu, G.; Christen, M.; Dinneen, C.E.; Eberhard, L.A.; von Rickenbach, D.; Bartelt, P. Reconstruction of four-dimensional rockfall trajectories using remote sensing and rock-based accelerometers and gyroscopes. Earth Surf. Dyn. 2019, 7, 199–210. [Google Scholar] [CrossRef]
- Hormes, A.; Adams, M.; Amabile, A.S.; Blauensteiner, F.; Demmler, C.; Fey, C.; Ostermann, M.; Rechberger, C.; Sausgruber, T.; Vecchiotti, F.; et al. Innovative methods to monitor rock and mountain slope deformation. Geomech. Tunn. 2020, 13, 88–102. [Google Scholar] [CrossRef]
- Lambert, S.; Nicot, F. Rockfall Engineering; Lambert, S., Nicot, F., Eds.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013; ISBN 9781118601532. [Google Scholar]
- Bonneau, D.A.; Hutchinson, D.J.; DiFrancesco, P.-M.; Coombs, M.; Sala, Z. Three-dimensional rockfall shape back analysis: Methods and implications. Nat. Hazards Earth Syst. Sci. 2019, 19, 2745–2765. [Google Scholar] [CrossRef]
- Godone, D.; Allasia, P.; Borrelli, L.; Gullà, G. UAV and Structure from Motion Approach to Monitor the Maierato Landslide Evolution. Remote Sens. 2020, 12, 1039. [Google Scholar] [CrossRef]
- Wu, Q.; Song, C.; Liu, K.; Ke, L. Integration of TanDEM-X and SRTM DEMs and Spectral Imagery to Improve the Large-Scale Detection of Opencast Mining Areas. Remote Sens. 2020, 12, 1451. [Google Scholar] [CrossRef]
- Song, W.; Song, W.; Gu, H.; Li, F. Progress in the Remote Sensing Monitoring of the Ecological Environment in Mining Areas. Int. J. Environ. Res. Public Health 2020, 17, 1846. [Google Scholar] [CrossRef]
- Nascimento, F.S.; Gastauer, M.; Souza-Filho, P.W.M.; Nascimento, W.R.; Santos, D.C.; Costa, M.F. Land cover changes in open-cast mining complexes based on high-resolution remote sensing data. Remote Sens. 2020, 12, 611. [Google Scholar] [CrossRef]
- Schmidt, H.; Glaesser, C. Multitemporal analysis of satellite data and their use in the monitoring of the environmental impacts of open cast lignite mining areas in eastern germany. Int. J. Remote Sens. 1998. [Google Scholar] [CrossRef]
- Verma, S.; Malpe, D.B. Mining Activity Monitoring Through Remote Sensing and GIS- A Case Study from Wani Area of Yavatmal District, Maharashtra. Int. J. Adv. Remote Sens. GIS 2017. [Google Scholar] [CrossRef]
- Bhattacharya, R.K.; Das Chatterjee, N.; Das, K. Impact of instream sand mining on habitat destruction or transformation using coupling models of HSI and MLR. Spat. Inf. Res. 2020, 28, 67–85. [Google Scholar] [CrossRef]
- Gläßer, C.; Birger, J.; Herrmann, B. Integrated monitoring and management system of lignite opencast mines using multiple remote sensing data and GIS. In Operational Remote Sensing for Sustainable Development; Nieuwenhuis, G.J.A., Vaughan, R.A., Molehaar, M., Eds.; Operational Remote Sensing for Sustainable Development: Rotterdam, The Netherlands, 1999; pp. 439–444. [Google Scholar]
- Götze, C.; Beyer, F.; Gläßer, C. Pioneer vegetation as an indicator of the geochemical parameters in abandoned mine sites using hyperspectral airborne data. Environ. Earth Sci. 2016, 75, 613. [Google Scholar] [CrossRef]
- Platt, R.V.; Manthos, D.; Amos, J. Estimating the Creation and Removal Date of Fracking Ponds Using Trend Analysis of Landsat Imagery. Environ. Manage. 2018, 61, 310–320. [Google Scholar] [CrossRef]
- Khan, N.M.; Rastoskuev, V.V.; Sato, Y.; Shiozawa, S. Assessment of hydrosaline land degradation by using a simple approach of remote sensing indicators. Agric. Water Manag. 2005, 77, 96–109. [Google Scholar] [CrossRef]
- Symeonakis, E.; Drake, N. Monitoring desertification and land degradation over sub-Saharan Africa. Int. J. Remote Sens. 2004, 25, 573–592. [Google Scholar] [CrossRef]
- Hunter, F.D.L.; Mitchard, E.T.A.; Tyrrell, P.; Russell, S. Inter-Seasonal Time Series Imagery Enhances Classification Accuracy of Grazing Resource and Land Degradation Maps in a Savanna Ecosystem. Remote Sens. 2020, 12, 198. [Google Scholar] [CrossRef]
- Giuliani, G.; Mazzetti, P.; Santoro, M.; Nativi, S.; Van Bemmelen, J.; Colangeli, G.; Lehmann, A. Knowledge generation using satellite earth observations to support sustainable development goals (SDG): A use case on Land degradation. Int. J. Appl. Earth Obs. Geoinf. 2020, 88, 102068. [Google Scholar] [CrossRef]
- del Valle, H.F.; Blanco, P.D.; Metternicht, G.I.; Zinck, J.A. Radar Remote Sensing of Wind-Driven Land Degradation Processes in Northeastern Patagonia. J. Environ. Qual. 2010, 39, 62–75. [Google Scholar] [CrossRef] [PubMed]
- Eagleston, H.; Marion, J.L. Application of airborne LiDAR and GIS in modeling trail erosion along the Appalachian Trail in New Hampshire, USA. Landsc. Urban Plan. 2020, 198, 103765. [Google Scholar] [CrossRef]
- Abdelkareem, M.; Gaber, A.; Abdalla, F.; El-Din, G.K. Use of optical and radar remote sensing satellites for identifying and monitoring active/inactive landforms in the driest desert in Saudi Arabia. Geomorphology 2020, 362, 107197. [Google Scholar] [CrossRef]
- Davis, J.M.; Grindrod, P.M.; Boazman, S.J.; Vermeesch, P.; Baird, T. Quantified Aeolian Dune Changes on Mars Derived From Repeat Context Camera Images. Earth Sp. Sci. 2020, 7. [Google Scholar] [CrossRef]
- Shumack, S.; Hesse, P.; Farebrother, W. Deep learning for dune pattern mapping with the AW3D30 global surface model. Earth Surf. Process. Landf. 2020, 45, 2417–2431. [Google Scholar] [CrossRef]
- Radebaugh, J.; Lorenz, R.; Farr, T.; Paillou, P.; Savage, C.; Spencer, C. Linear dunes on Titan and earth: Initial remote sensing comparisons. Geomorphology 2010, 121, 122–132. [Google Scholar] [CrossRef]
- Blumberg, D.G. Remote Sensing of Desert Dune Forms by Polarimetric Synthetic Aperture Radar (SAR). Remote Sens. Environ. 1998, 65, 204–216. [Google Scholar] [CrossRef]
- Bradley, A.V.; Haughan, A.E.; Al-Dughairi, A.; McLaren, S.J. Spatial variability in shrub vegetation across dune forms in central Saudi Arabia. J. Arid Environ. 2019, 161, 72–84. [Google Scholar] [CrossRef]
- Bhadra, B.K.; Rehpade, S.B.; Meena, H.; Srinivasa Rao, S. Analysis of Parabolic Dune Morphometry and Its Migration in Thar Desert Area, India, using High-Resolution Satellite Data and Temporal DEM. J. Indian Soc. Remote Sens. 2019, 47, 2097–2111. [Google Scholar] [CrossRef]
- Warren, A.; Allison, D. The palaeoenvironmental significance of dune size hierarchies. Palaeogeogr. Palaeoclimatol. Palaeoecol. 1998, 137, 289–303. [Google Scholar] [CrossRef]
- Michel, S.; Avouac, J.-P.; Ayoub, F.; Ewing, R.C.; Vriend, N.; Heggy, E. Comparing dune migration measured from remote sensing with sand flux prediction based on weather data and model, a test case in Qatar. Earth Planet. Sci. Lett. 2018, 497, 12–21. [Google Scholar] [CrossRef]
- Mandlburger, G.; Hauer, C.; Wieser, M.; Pfeifer, N. Topo-Bathymetric LiDAR for Monitoring River Morphodynamics and Instream Habitats—A Case Study at the Pielach River. Remote Sens. 2015, 7, 6160–6195. [Google Scholar] [CrossRef]
- Allen, G.H.; Pavelsky, T. Global extent of rivers and streams. Science 2018, 361, 585–588. [Google Scholar] [CrossRef]
- Bird, S.; Hogan, D.; Schwab, J. Photogrammetric monitoring of small streams under a riparian forest canopy. Earth Surf. Process. Landf. 2010, 970, 952–970. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Fryirs, K.A.; Brierley, G.; Bangen, S.G.; Bouwes, N.; O’Brien, G. Geomorphic mapping and taxonomy of fluvial landforms. Geomorphology 2015, 248, 273–295. [Google Scholar] [CrossRef]
- Demarchi, L.; Bizzi, S.; Piégay, H. Regional hydromorphological characterization with continuous and automated remote sensing analysis based on VHR imagery and low-resolution LiDAR data. Earth Surf. Process. Landf. 2017, 42, 531–551. [Google Scholar] [CrossRef]
- Pinheiro, M.; Amao-Oliva, J.; Scheiber, R.; Jaeger, M.; Horn, R.; Keller, M.; Fischer, J.; Reigber, A. Dual-frequency airborne SAR for large scale mapping of tidal flats. Remote Sens. 2020, 12, 1827. [Google Scholar] [CrossRef]
- Belletti, B.; Dufour, S.; Piégay, H. What is the Relative Effect of Space and Time to Explain the Braided River Width and Island Patterns at a Regional Scale? River Res. Appl. 2015, 31, 1–15. [Google Scholar] [CrossRef]
- Lallias-Tacon, S.; Liébault, F.; Piégay, H. Step by step error assessment in braided river sediment budget using airborne LiDAR data. Geomorphology 2014, 214, 307–323. [Google Scholar] [CrossRef]
- Houser, C.; Hamilton, S. Morphodynamics of a 1000-year flood in the Kamp River, Austria, and impacts on floodplain morphology. Earth Surf. Process. Landf. 2009, 34, 613–628. [Google Scholar] [CrossRef]
- Biron, P.M.; Choné, G.; Buffin-Bélanger, T.; Demers, S.; Olsen, T. Improvement of streams hydro-geomorphological assessment using LiDAR DEMs. Earth Surf. Process. Landf. 2013, 38, 1808–1821. [Google Scholar] [CrossRef]
- Perks, M.T.; Russell, A.J.; Large, A.R.G. Technical Note: Advances in flash flood monitoring using UAVs. Hydrol. Earth Syst. Sci. Discuss. 2016, 20, 4005–4015. [Google Scholar] [CrossRef]
- Ridolf, E.; Manciola, P. Water Level Measurements from Drones: A Pilot Case Study at a Dam Site. Water 2018, 10, 297. [Google Scholar] [CrossRef]
- Hirpa, F.A.; Hopson, T.M.; De Groeve, T.; Brakenridge, G.R.; Gebremichael, M.; Restrepo, P.J. Upstream satellite remote sensing for river discharge forecasting: Application to major rivers in South Asia. Remote Sens. Environ. 2013, 131, 140–151. [Google Scholar] [CrossRef]
- Gilvear, D.J.; Davids, C.; Tyler, A.N. The use of remotely sensed data to detect channel hydromorphology; River Tummel, Scotland. River Res. Appl. 2004, 20, 795–811. [Google Scholar] [CrossRef]
- Brousse, G.; Arnaud-Fassetta, G.; Liébault, F.; Bertrand, M.; Melun, G.; Loire, R.; Malavoi, J.; Fantino, G.; Borgniet, L. Channel response to sediment replenishment in a large gravel-bed river: The case of the Saint-Sauveur dam in the Buëch River (Southern Alps, France). River Res. Appl. 2020, 36, 880–893. [Google Scholar] [CrossRef]
- Vázquez-Tarrío, D.; Borgniet, L.; Liébault, F.; Recking, A. Using UAS optical imagery and SfM photogrammetry to characterize the surface grain size of gravel bars in a braided river (Vénéon River, French Alps). Geomorphology 2017, 285, 94–105. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Bizzi, S.; Marchetti, G. Robotic photosieving from low-cost multirotor sUAS: A proof-of-concept. Earth Surf. Process. Landf. 2018, 43, 1160–1166. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dugdale, S.J.; Breckon, T.P.; Dietrich, J.D.; Fonstad, M.A.; Miyamoto, H.; Woodget, A.S. Generalised classification of hyperspatial resolution airborne imagery of fluvial scenes with deep convolutional neural networks. Geophys. Res. Abstr. 2019, 21, 1. [Google Scholar]
- Carbonneau, P.E.; Lane, S.N.; Bergeron, N.E. Catchment-scale mapping of surface grain size in gravel bed rivers using airborne digital imagery. Water Resour. Res. 2004, 40. [Google Scholar] [CrossRef]
- Rainey, M.; Tyler, A.; Gilvear, D.; Bryant, R.; McDonald, P. Mapping intertidal estuarine sediment grain size distributions through airborne remote sensing. Remote Sens. Environ. 2003, 86, 480–490. [Google Scholar] [CrossRef]
- Cassel, M.; Piégay, H.; Fantino, G.; Lejot, J.; Bultingaire, L.; Michel, K.; Perret, F. Comparison of ground-based and UAV a-UHF artificial tracer mobility monitoring methods on a braided river. Earth Surf. Process. Landf. 2020, 45, 1123–1140. [Google Scholar] [CrossRef]
- Dietrich, J.T. Bathymetric Structure-from-Motion: Extracting shallow stream bathymetry from multi-view stereo photogrammetry. Earth Surf. Process. Landf. 2017, 42, 355–364. [Google Scholar] [CrossRef]
- Legleiter, C.J. Remote measurement of river morphology via fusion of LiDAR topography and spectrally based bathymetry. Earth Surf. Process. Landf. 2012, 37, 499–518. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Overstreet, B.T.; Glennie, C.L.; Pan, Z.; Fernandez-Diaz, J.C.; Singhania, A. Evaluating the capabilities of the CASI hyperspectral imaging system and Aquarius bathymetric LiDAR for measuring channel morphology in two distinct river environments. Earth Surf. Process. Landf. 2016, 41, 344–363. [Google Scholar] [CrossRef]
- Barale, V. Environmental Remote Sensing of the Mediterranean Sea. J. Environ. Sci. Heal. Part A 2003, 38, 1681–1688. [Google Scholar] [CrossRef]
- Kaliraj, S.; Chandrasekar, N.; Ramachandran, K.K. Mapping of coastal landforms and volumetric change analysis in the south west coast of Kanyakumari, South India using remote sensing and GIS techniques. Egypt. J. Remote Sens. Sp. Sci. 2017, 20, 265–282. [Google Scholar] [CrossRef]
- Dang, K.B.; Dang, V.B.; Bui, Q.T.; Nguyen, V.V.; Pham, T.P.N.; Ngo, V.L. A Convolutional Neural Network for Coastal Classification Based on ALOS and NOAA Satellite Data. IEEE Access 2020, 8, 11824–11839. [Google Scholar] [CrossRef]
- Valderrama-Landeros, L.; Blanco y Correa, M.; Flores-Verdugo, F.; Álvarez-Sánchez, L.F.; Flores-de-Santiago, F. Spatiotemporal shoreline dynamics of Marismas Nacionales, Pacific coast of Mexico, based on a remote sensing and GIS mapping approach. Environ. Monit. Assess. 2020, 192. [Google Scholar]
- Elnabwy, M.T.; Elbeltagi, E.; El Banna, M.M.; Elshikh, M.M.Y.; Motawa, I.; Kaloop, M.R. An approach based on landsat images for shoreline monitoring to support integrated coastal management - A case study, ezbet elborg, nile delta, Egypt. ISPRS Int. J. Geo-Inf. 2020, 9, 199. [Google Scholar] [CrossRef]
- Toure, S.; Diop, O.; Kpalma, K.; Maiga, A. Shoreline Detection using Optical Remote Sensing: A Review. ISPRS Int. J. Geo-Inf. 2019, 8, 75. [Google Scholar] [CrossRef]
- Arcioni, M.; Bensi, P.; Fehringer, M.; Fois, F.; Heliere, F.; Lin, C.C.; Scipal, K. The Biomass mission, status of the satellite system. Int. Geosci. Remote Sens. Symp. 2014, 1413–1416. [Google Scholar] [CrossRef]
- Gebert, N.; Domínguez, B.C.; Martín, M.D.; Di Salvo, E.; Temussi, F.; Giove, P.V.; Gibbons, M.; Phelps, P.; Griffiths, L. SAR Instrument Pre-development Activities for SAOCOM-CS. In Proceedings of the 11th European Conference on Synthetic Aperture Radar EUSAR 2016 SAR, Hamburg, Germany, 6–9 June 2016; pp. 718–721. [Google Scholar]
- Rosen, P.A.; Kim, Y.; Kumar, R.; Misra, T.; Bhan, R.; Sagi, V.R. Global persistent SAR sampling with the NASA-ISRO SAR (NISAR) mission. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; IEEE. pp. 0410–0414. [Google Scholar]
- JAXA Advanced Land Observing Satellite-4 (ALOS-4). 2018. Available online: http://global.jaxa.jp/projects/sat/alos4/ (accessed on 1 February 2018).
- Moreira, A.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.; Younis, M.; Lopez-Dekker, P.; Huber, S.; Villano, M.; Pardini, M.; Eineder, M.; et al. Tandem-L: A Highly Innovative Bistatic SAR Mission for Global Observation of Dynamic Processes on the Earth’s Surface. IEEE Geosci. Remote Sens. Mag. 2015, 3, 8–23. [Google Scholar] [CrossRef]
- Tandem-L. Available online: https://www.dlr.de/hr/desktopdefault.aspx/tabid-8113/14171_read-35837/ (accessed on 17 June 2020).
- Pierdicca, N.; Davidson, M.; Chini, M.; Dierking, W.; Djavidnia, S.; Haarpaintner, J.; Hajduch, G.; Laurin, G.V.; Lavalle, M.; López-Martínez, C.; et al. The Copernicus L-band SAR mission ROSE-L (Radar Observing System for Europe) (Conference Presentation). In Proceedings of the Active and Passive Microwave Remote Sensing for Environmental Monitoring III, Strasbourg, France, 9–12 September 2019; Notarnicola, C., Pierdicca, N., Bovenga, F., Santi, E., Eds.; SPIE Remote Sensing: Strasbourg, France, 2019; p. 13. [Google Scholar]
- Fagúndez, G.A.; Blettler, D.C.; Krumrick, C.G.; Bertos, M.A.; Trujillo, C.G. Do agrochemicals used during soybean flowering affect the visits of apis mellifera L.? Span. J. Agric. Res. 2016, 14, 1130–1134. [Google Scholar] [CrossRef]
- Cohen, M.; Larkins, A.; Semedo, P.L.; Burbidge, G. NovaSAR-S low cost spaceborne SAR payload design, development and deployment of a new benchmark in spaceborne radar. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA , 8–12 May 2017; 2017; pp. 0903–0907. [Google Scholar]
- Qi, W.; Dubayah, R.O. Combining Tandem-X InSAR and simulated GEDI lidar observations for forest structure mapping. Remote Sens. Environ. 2016, 187, 253–266. [Google Scholar] [CrossRef]
- Miliaresis, G.C.; Argialas, D. Segmentation of physiographic features from the global digital elevation model/GTOPO30. Comput. Geosci. 1999, 25, 715–728. [Google Scholar] [CrossRef]
- Denker, H. Evaluation of SRTM3 and GTOPO30 terrain data in Germany. In Gravity, Geoi and Space Missions; Fernandes, C., BastosJoana, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 218–223. [Google Scholar]
- USGS 30 ARC-second Global Elevation Data, GTOPO30. Research Data Archive at the National Center for Atmospheric Research, Computational and Information Systems Laboratory. 1997. Available online: https://doi.org/10.5065/A1Z4-EE71 (accessed on 1 January 2020).
- USGS Shuttle Radar Topography Mission; 1 Arc Second scene SRTM_u03_n008e004; Unfilled Unfinished 2. 2004.
- Rexer, M.; Hirt, C. Comparison of free high resolution digital elevation data sets (ASTER GDEM2, SRTM v2.1/v4.1) and validation against accurate heights from the Australian National Gravity Database. Aust. J. Earth Sci. 2014, 61, 213–226. [Google Scholar] [CrossRef]
- Tadono, T.; Nagai, H.; Ishida, H.; Oda, F.; Naito, S.; Minakawa, K.; Iwamoto, H. GENERATION OF THE 30 M-MESH GLOBAL DIGITAL SURFACE MODEL BY ALOS PRISM. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B4, 157–162. [Google Scholar] [CrossRef]
- Global Land Survey Digital Elevation Model: (GLSDEM). Available online: https://ui.adsabs.harvard.edu/abs/2019AGUFM.A33L2955F/abstract (accessed on 17 June 2020).
- Theobald, D.M.; Harrison-Atlas, D.; Monahan, W.B.; Albano, C.M. Ecologically-Relevant Maps of Landforms and Physiographic Diversity for Climate Adaptation Planning. PLoS ONE 2015, 10, e0143619. [Google Scholar] [CrossRef]
- Kennedy, C.M.; Oakleaf, J.R.; Theobald, D.M.; Baruch-Mordo, S.; Kiesecker, J. Managing the middle: A shift in conservation priorities based on the global human modification gradient. Glob. Chang. Biol. 2019, 25, 811–826. [Google Scholar] [CrossRef]
- COP-DEM. Available online: https://spacedata.copernicus.eu/documents/20126/0/GEO1988-CopernicusDEM-SPE-002_ProductHandbook_I1.00.pdf/082dd479-f908-bf42-51bf-4c0053129f7c?t=1586526993604 (accessed on 31 October 2020).
- Stereńczak, K.; Laurin, G.V.; Chirici, G.; Coomes, D.A.; Dalponte, M.; Latifi, H.; Puletti, N. Global Airborne Laser Scanning Data Providers Database (GlobALS)—A New Tool for Monitoring Ecosystems and Biodiversity. Remote Sens. 2020, 12, 1877. [Google Scholar] [CrossRef]
- ESA The Terrafirma Atlas. The terrain motion information service for Europe. 2009. Available online: http://esamultimedia.esa.int/multimedia/publications/TerrafirmaAtlas/pageflip.html (accessed on 2 December 2018).
- Bateson, L.; Novali, F.; Cooksley, G. Terrafirma User Guide. 2010. Available online: http://www.terrafirma.eu.com/images_all_site/documents/user_guide/Terrafirma%20User%20Guide%20Oct%202010.pdf (accessed on 2 December 2018).
- Semple, A.G.; Pritchard, M.E.; Lohman, R.B. An incomplete inventory of suspected human-induced surface deformation in North America detected by satellite interferometric synthetic-aperture radar. Remote Sens. 2017, 9, 1296. [Google Scholar] [CrossRef]
- ArcticDEM. Available online: https://ui.adsabs.harvard.edu/abs/2017AGUFM.C51A0951C/abstract (accessed on 17 June 2020).
- ArcticDEM. Available online: https://ui.adsabs.harvard.edu/abs/2016EGUGA..18.8396M/abstract (accessed on 17 June 2020).
- Dai, C.; Howat, I.M. Measuring Lava Flows With ArcticDEM: Application to the 2012-2013 Eruption of Tolbachik, Kamchatka. Geophys. Res. Lett. 2017, 44, 12133–12140. [Google Scholar] [CrossRef]
- Cignetti, M.; Guenzi, D.; Ardizzone, F.; Allasia, P.; Giordan, D. An Open-Source Web Platform to Share Multisource, Multisensor Geospatial Data and Measurements of Ground Deformation in Mountain Areas. ISPRS Int. J. Geo-Inf. 2019, 9, 4. [Google Scholar] [CrossRef]
- Nardi, F.; Annis, A.; Di Baldassarre, G.; Vivoni, E.R.; Grimaldi, S. GFPLAIN250m, a global high-resolution dataset of earth’s floodplains. Sci. Data 2019, 6, 1–6. [Google Scholar] [CrossRef]
- Yamazaki, D.; Ikeshima, D.; Sosa, J.; Bates, P.D.; Allen, G.H.; Pavelsky, T.M. MERIT Hydro: A High-Resolution Global Hydrography Map Based on Latest Topography Dataset. Water Resour. Res. 2019, 55, 5053–5073. [Google Scholar] [CrossRef]
- Samela, C.; Manfreda, S.; Troy, T.J. Dataset of 100-year flood susceptibility maps for the continental U.S. derived with a geomorphic method. Data Br. 2017, 12, 203–207. [Google Scholar] [CrossRef]
- Dorigo, W.A.; Wagner, W.; Hohensinn, R.; Hahn, S.; Paulik, C.; Xaver, A.; Gruber, A.; Drusch, M.; Mecklenburg, S.; Van Oevelen, P.; et al. The International Soil Moisture Network: A data hosting facility for global in situ soil moisture measurements. Hydrol. Earth Syst. Sci. 2011, 15, 1675–1698. [Google Scholar] [CrossRef]
- Carroll, M.L.; DiMiceli, C.M.; Townshend, J.R.G.; Sohlberg, R.A.; Noojipady, P. Flood Map, 2008 US Midwest Flood, MOD_FLOOD.2008158.Midwest.Geog, Version 1; University of Maryland: College Park, MD, USA, 2008. [Google Scholar]














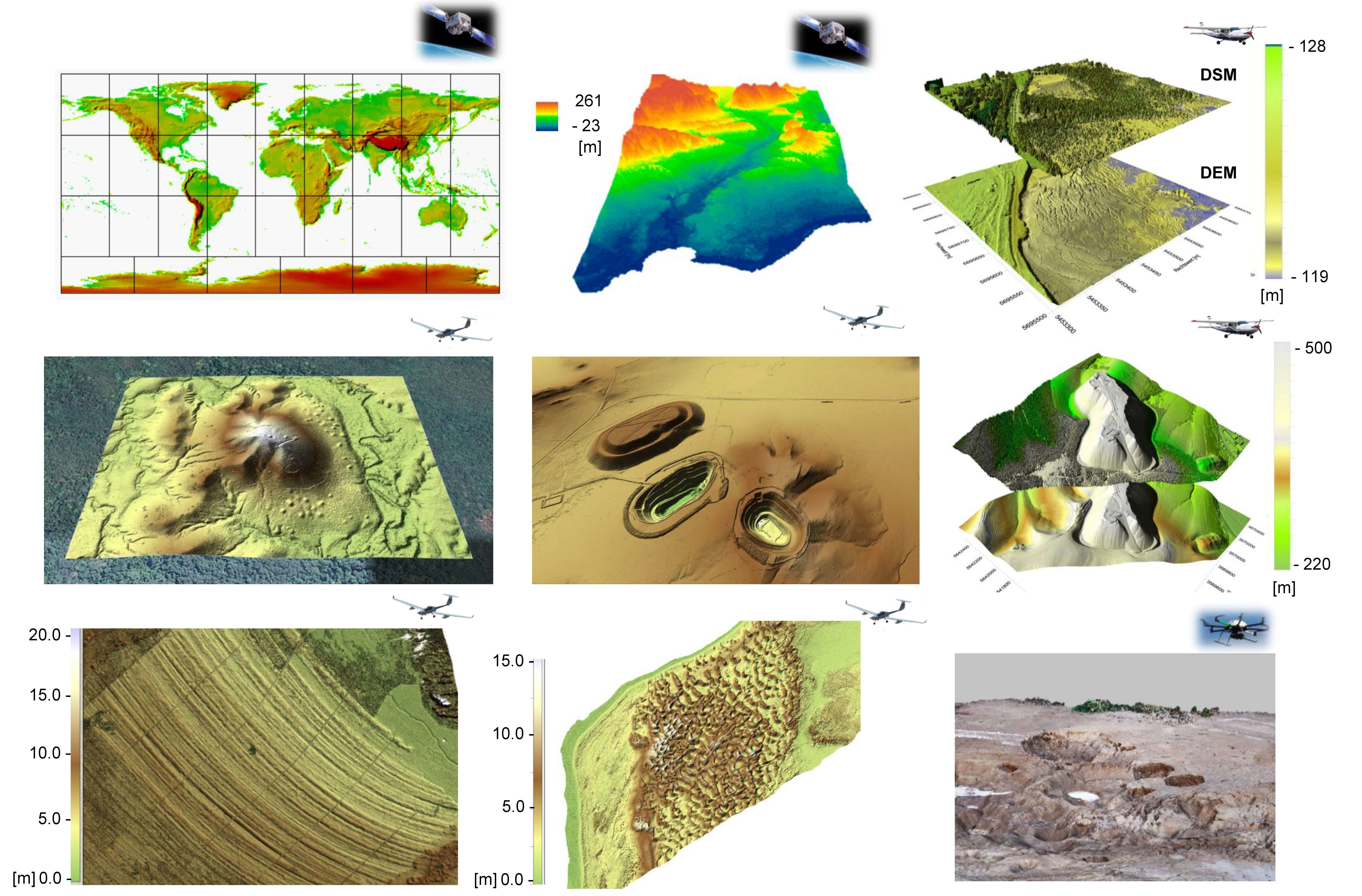{kind=link}
{kind=link}
{kind=link}
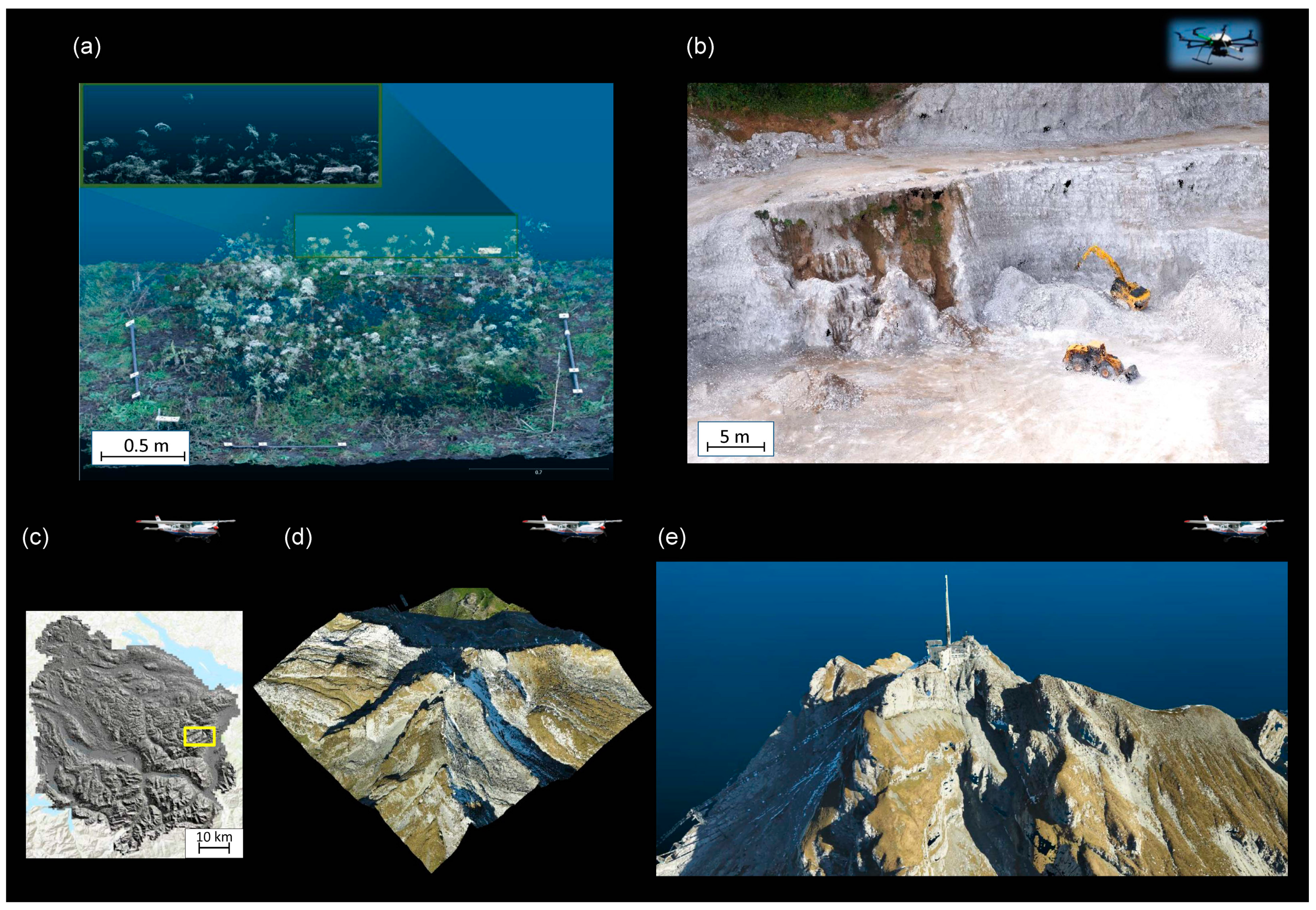{kind=link}
{kind=link}
{kind=link}
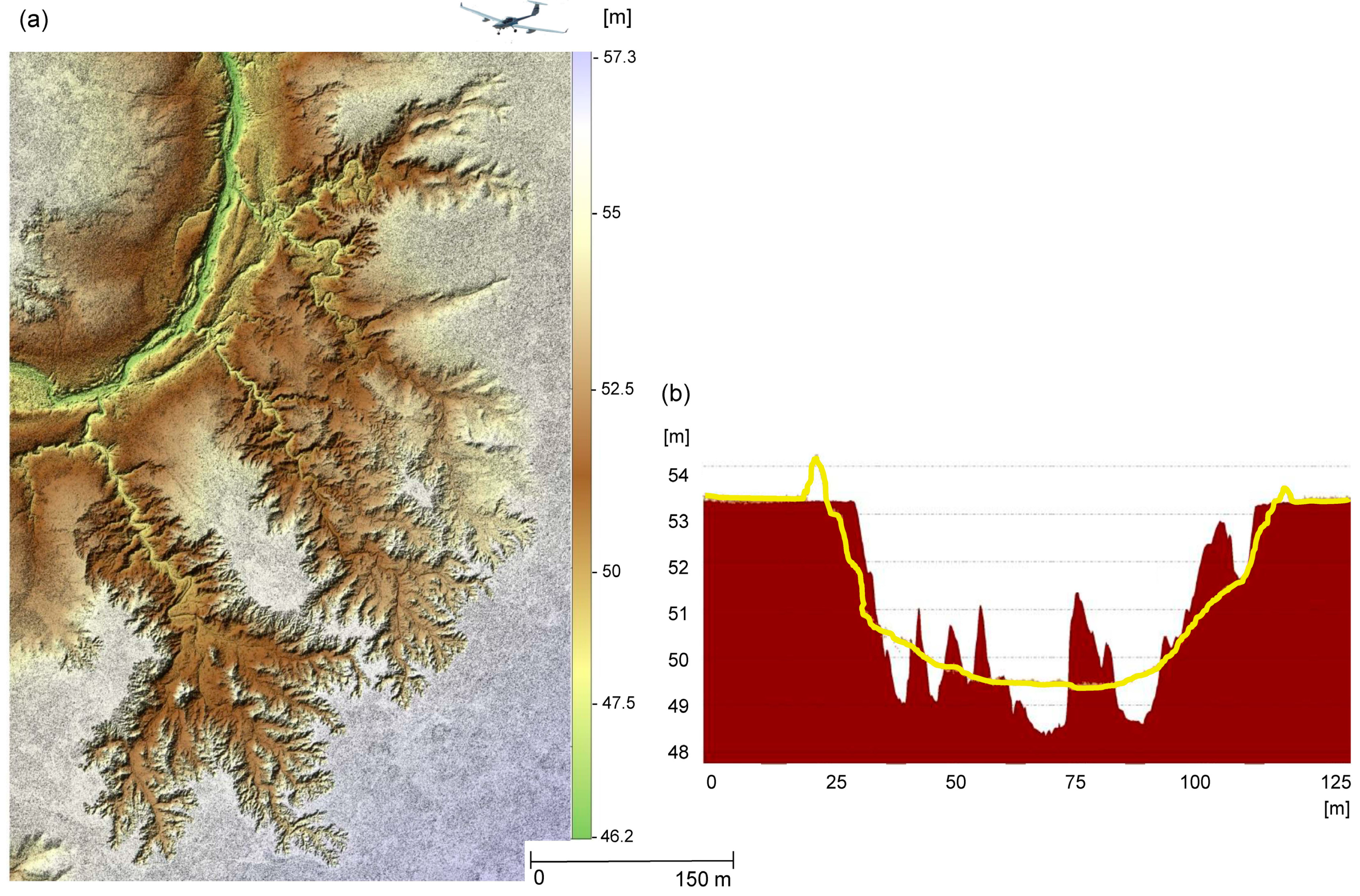{kind=link}
{kind=link}
{kind=link}
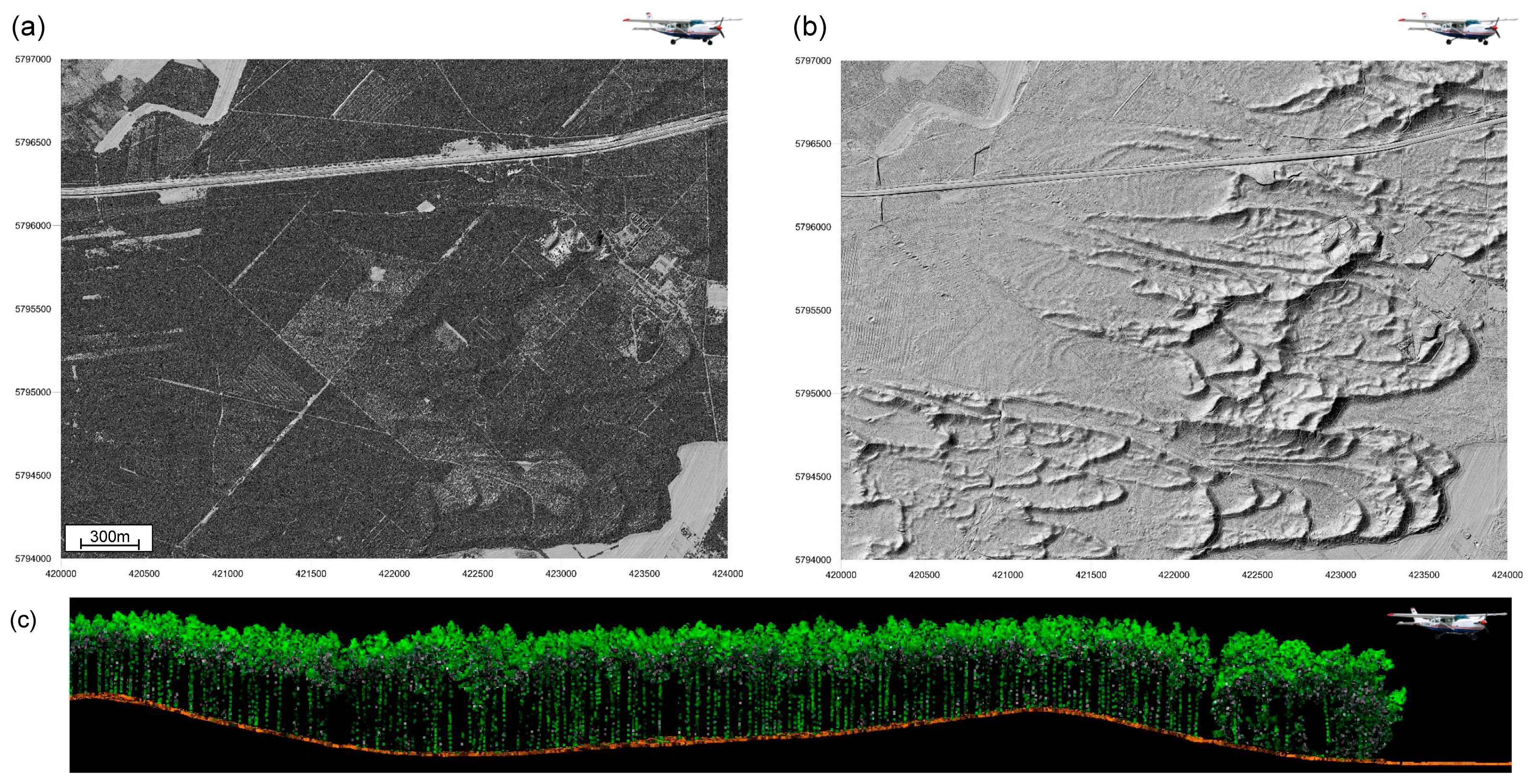{kind=link}
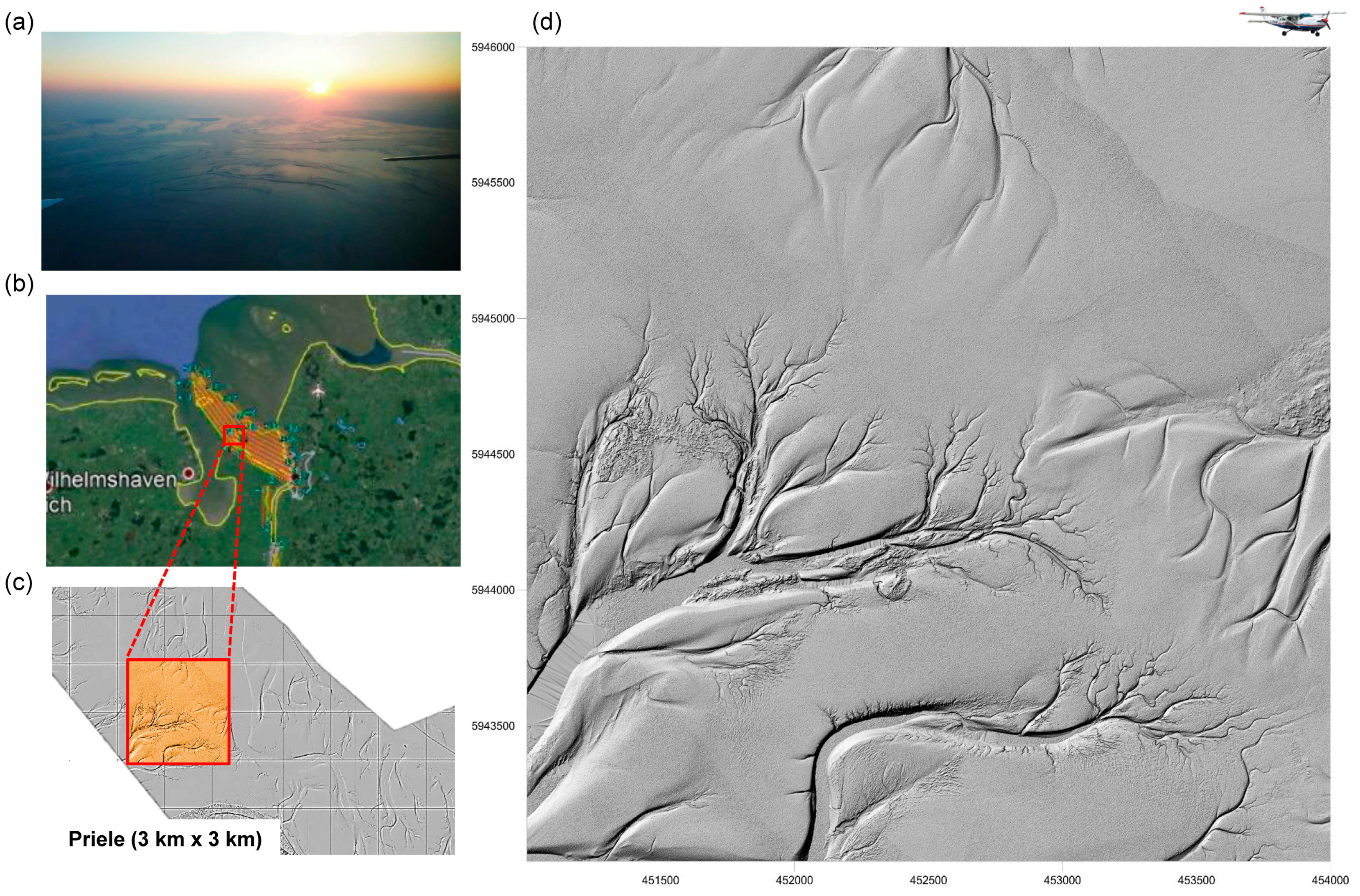{kind=link}
{kind=link}
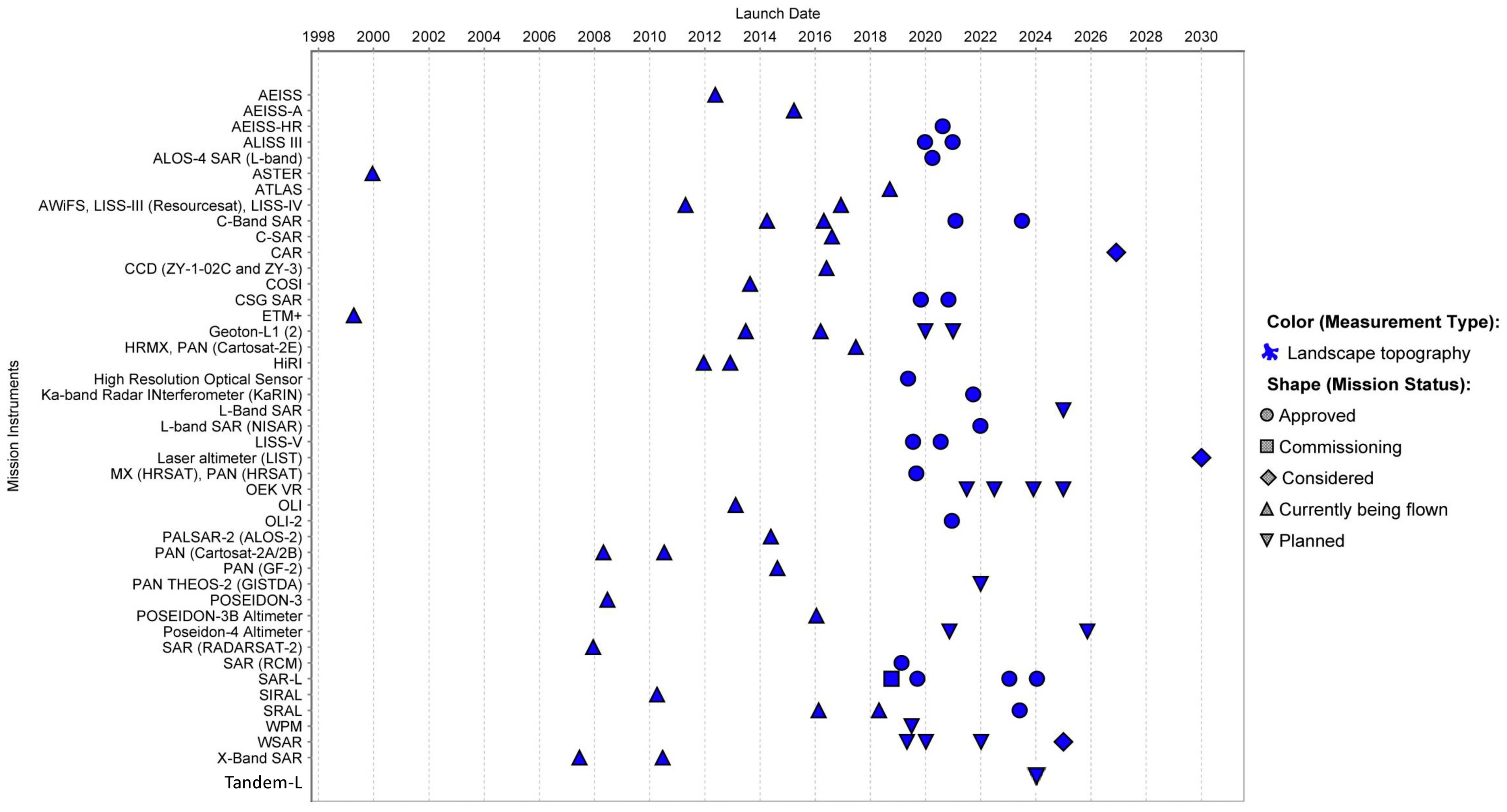{kind=link}
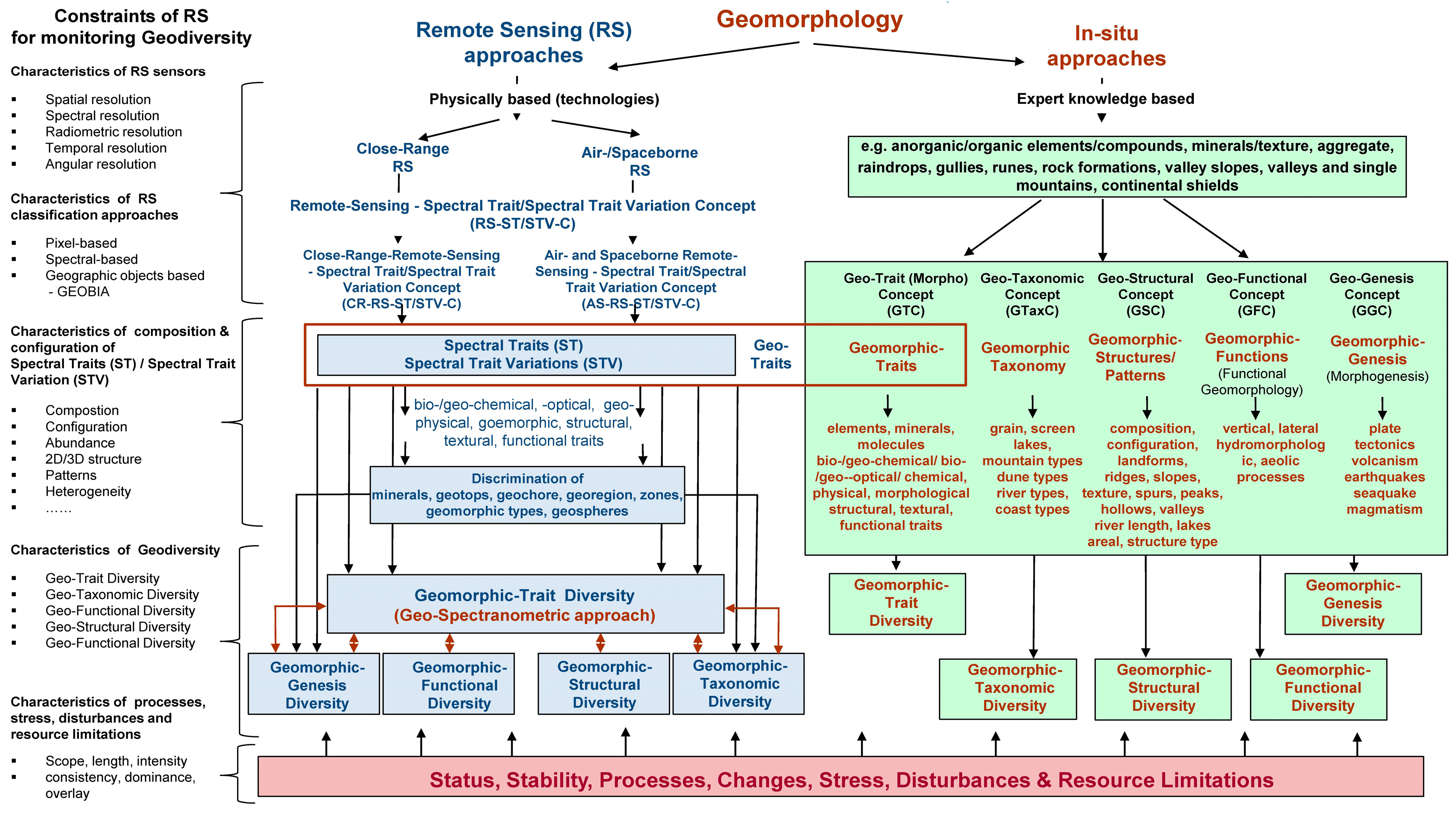{kind=link}
| Acqui-si-tion Tech-nique | High Spatial Resolu-tion | Wide Area Coverage | High Temporal Refresh | High Vertical Accuracy | High Complex-ity of Retrieval | Canopy Pene-tra-tion for DEM/(no DSM) | Weather/Il-lumi-na-tion Indepen-dence |
|---|---|---|---|---|---|---|---|
| Spaceborne Repeat-Pass InSAR | + | ++ | + | + | + | ++ | ++ |
| Spaceborne Single-Pass InSAR | + | ++ | ++ | + | - | ++ | ++ |
| Spaceborne LiDAR | + | ++ | + | + | - | + | + |
| Spaceborne RADAR Altimeter | − | + | + | ++ | - | + | ++ |
| Spaceborne Radar-grammetry | + | ++ | ++ | + | - | ++ | ++ |
| Spaceborne Photo-grammetry | + | + | + | + | - | - | - |
| Airborne InSAR | ++ | + | - | - | + | ++ | + |
| Airborne LiDAR | ++ | - | - | ++ | + | + | - |
| Airborne Radar-grammetry | ++ | - | - | + | + | ++ | + |
| Airborne Photo-grammetry | ++ | + | - | + | + | - | - |
| UAV-borneLiDAR | ++ | - | ++ | ++ | + | ++ | + |
| UAV-borne Photo-grammetry | ++ | - | ++ | ++ | - | - | - |
| Sensor/Satellite/Mission | Scale/Access | Sensor Type & Auxiliary DEM Products | Nominal Horizontal Resolution [m] | Vertical Accuracy [m] | RMSE [m] | Reference |
|---|---|---|---|---|---|---|
| Spaceborne Photogrammetric | ||||||
| ALOS AW3D30 | Global/open access | optical | 30 | 7 (LE 90) | 4.4 | [265,266] |
| Terra ASTER | Global/open access | optical | 30 | (~13) | 5 | [87,88] |
| ASTER GDEM 2 | Global/open access | optical | 30 | 17 (95% conf.) | 2.3 | [87] |
| ASTER GDEM 3 | Global/open access | optical | 72 (2.4 arcsec) (for Japan only, [267]) | 17 (95% conf.) | 2.3 | [92,102] |
| SPOT DEM | Continents/commercial | optical | 30 | 10 | NA | [266] |
| IKONOS | commercial | optical | 22 | ~1.5 | NA | [266] |
| Spaceborne—RADAR | ||||||
| TanDEM-X 90 | Global/open access | SAR X | 30, 90 | NA | 3.1 | [268,269] |
| TanDEM-X | Global/open access | SAR X | 10 | <0.20 | <1.4 | [103] |
| TerraSAR-X | Global/open access | SAR X | 10 | <0.20 | <1.4 | [103] |
| Bare Earth DEM | Global/open access | SRTM | 90 | 5.9 | 5.9 | [270] |
| EarthEnv-DEM90 | Global/open access | SRTM3, ASTER GDEM, GLSDEM SRTM3 | 90 | −6.2 (average in ASTER zone) −1.64 (average in SRTM zone)0.82 (average in blend zone) | 10.554 (in ASTER zone)4.13 (in SRTM zone)5.362 (in blend zone) | [271] |
| GMTED2010 | Global/open access | SRTM & 10 other sources | 250, 500, 1000 | 6 (RMSE) | 26 | [272] |
| MERIT | Global/open access | SRTM3, AW3D30, VFP-DEM, ICESat GLAS | 90 | <2 (for 58% of globe) | 5.0 (LE90) | [273] |
| SRTM | Global/open access | SAR C-band | 30, 90 | 6–9 (LE90) | 6.0 (MAE) | [274] |
| Viewfinder Panorama | Global/open access | ASTER, SRTM & other sources | 90 | NA | Not reported | [275] |
| SRTM Plus or SRTM NASA V3 | Global/open access | SAR C-band | 90 | 6–9 (LE90) | 5.9 | [266] |
| ALOS AW3D (ALOS PALSAR) | Global/commercial | optical | 5 | 4.10 | 2.7 | [276,277] |
| PlanetDEM 30 Plus | Global/commercial | SRTM | <10 (LE90) | Not reported | Not reported | [278] |
| NEXTMap World 10 | Global/commercial | Not reported | 10 | 5 (RMSE) | 10 (LE9) | [279] |
| WorldDEM | Global/commercial | TanDEM-X | 12 | <2 (relative), <6 (absolute) | <1.4 | [268,277] |
| Tandem-L (planned) | Global | SAR L-band | ~12 (bare), 25 (forest) | 2 (bare), 4 (vegetated) | NA | [46] |
| Data Source | Generation Method | Date of the Study | Region of the Study | Reference |
|---|---|---|---|---|
| SPOT-5 HRS | Parallel projection modeling | 2004 | Korea, Belgium | [280] |
| SRTM, ASTER | Statistical measures | 2006 | Crete, Greece | [281] |
| IKONOS, QuickBird and OrbView-3 | Automatic image matching | 2006 | Maras and Zonguldak, Turkey; Phoenix, United States | [282] |
| SPOT-5 in-track HRS and across-track HRG | Area-based multiscale image matching method | 2006 | North of Québec City, Canada | [283] |
| IKONOS, QuickBird | Physical and empirical models | 2006 | North of Québec City, Canada | [284] |
| IKONOS | Multi-image matching | 2006 | Thun, Switzerland | [285] |
| IKONOS, QuickBird, OrbView-3, Cartosat-1 | Automatic image matching | 2007 | Maras and Zonguldak, Turkey; Phoenix, United States | [286] |
| IKONOS | Automatic image matching | 2008 | Maras and Istanbul, Turkey | [287] |
| Cartosat-1 | Towards automated DEM generation | 2008 | Catalonia, Spain | [239] |
| Geoeye-1 and Cosmo-SkyMed | Rigorous model and RPC model | 2010 | Rome and Merano, Italy | [288] |
| GeoEye-1 and TerraSAR-X | RPC models for optical, radargrammetry for synthetic aperture RADAR (SAR) | 2012 | Trento, Italy | [289] |
| WorldView-2 Google | Bias-compensated RPC bundle block-adjusted images generation, dense image matching, and DSM generation | 2016 | Munich, Germany | [290] |
| Google Earth (GE) | Terrain extraction from GE | 2016 | Guangyuan City, China | [291] |
| ALOS PALSAR | DEM extraction with InSAR technique | 2015 | Guangyuan City, China | [292] |
| ASTER GDEM v.2, SRTM-C, TerraSAR-X, ALOS W3D | Vertical accuracy by dGPS and morphometric comp | 2017 | Central Andean Plateu, Argentina | [293] |
| AW3D30, ASTER, SRTM30, SRTM90, TanDEM-X | Optical stereo mapping (AW3D30, ASTER) & Single-pass SAR interferometry (SRTM30, SRTM90, TanDEM-X) | 2020 | 14 sites in Europe, USA and Antarctica | [294] |
| Mission/Platform Sensor UAV 1 Airborne 2 Spaceborne 3 | Sensor Characteristics | Spectral Resolution Spectral Bands/Frequency | References |
|---|---|---|---|
| Terrain, Digital Elevation Model (DEM) | |||
| SRTM 3 | single pass InSAR | X-band, C-band | [69] |
| TerraSAR-X 3 | single pass InSAR | X-band | [57] |
| TanDEM-X 3 | single pass InSAR | X-band | [103,295] |
| Sentinel-1 A/B 3 | repeat pass InSAR | C-band | [296] |
| ALOS PALSAR 3 | repeat pass InSAR | L-band | [297] |
| ALOS-2 PALSAR-2 3 | repeat pass InSAR | L-band | [298] |
| Terra ASTER 3 | dual stereographic imaging system (line scanner) | NIR (nadir and 28° backward looking) | [299] |
| ALOS PRISM 3 | triplet stereographic imaging system (line scanner) | Panchromatic: λ = 520—770 nm (forward, nadir, and backwards looking) | [297,300] |
| ICESat GLAS 3 | LiDAR (full waveform) | 3 lasers (λ = 1064 nm) | [301] |
| Sentinel-3 SRAL 3 | RADAR altimeter | Ku-band, C-band | [302] |
| F-SAR2 | single pass InSAR repeat pass InSAR | X-band, S-band C-band, L-band, P-band | [303] |
| UAVSAR 2 | repeat pass InSAR | L-band | [304] |
| Orbisar-RFP 2 | single pass InSAR | X-band, P-band | [305] |
| Pi-SAR-L 2 | repeat pass InSAR | L-band | [306] |
| Leica DMC III 2 | stereographic imaging system (discrete overlapping images) | R, G, B, NIR | [307] |
| Leica ADS40 2 | triplet stereographic imaging system (line scanner) | R, G, B, NIR (nadir), panchromatic (forward, nadir, and backwards looking) | [308] |
| Quantum systems TRON1 Quadrocopter-fixed wing hybrid (platform, gimbal, various camera systems) | stereographic imaging system (discrete overlapping images) | R, G, B (multiple sensors) | [309] |
| Geocopter X8000 1 Octocopter (platform, gimbal, various camera systems) | stereographic imaging system (discrete overlapping images) | R, G, B (Sony NEX7) or similar sensors | [86] |
| DJI Phantom IV Pro 1 Quadrocopter (platform, gimbal, installed camera system) | stereographic imaging system (discrete overlapping images) | R, G, B (1′’ CMOS) | [310] |
| RiCOPTER VUX-SYS1 (platform with integrated VUX1UAV LiDAR scanner) | LiDAR (multiple return, echo intensity recording) | One laser (NIR), max. 500,000 shots/s | [311] |
| Quantum systems TRON 1 Quadrocopter-fixed wing hybrid (platform with integrated YellowScan “SURVEYOR” LiDAR scanner) | LiDAR (two return) | One laser (λ = 905 nm), max. 300,000 shots/s | [309] |
| Surfaces/vegetation surfaces (digital surface model–DSM) | |||
| TanDEM-X 3 | single pass InSAR | X-band | [295] |
| ALOS PALSAR 3 | repeat pass InSAR | L-band | [297] |
| ALOS-2 PALSAR-2 3 | repeat pass InSAR | L-band | [298] |
| ICEStaT GLAS 3 | LiDAR (full waveform) | 3 lasers (λ = 1064 nm) | [301] |
| F-SAR 2 | single pass InSAR repeat pass InSAR | X-band, S-band C-band, L-band, P-band | [303] |
| UAVSAR 2 | repeat pass InSAR | L-band | [304] |
| Orbisar-RFP 2 | single pass InSAR | X-band, P-band | [305] |
| Pi-SAR-L 2 | repeat pass InSAR | L-band | [306] |
| Geocopter X8000 1 Octocopter (platform, gimbal, various camera systems) | stereographic imaging system (discrete overlapping images) | R, G, B (Sony NEX7) or similar sensors | [86,312] |
| DJI Phantom IV Pro 1 Quadrocopter (platform, gimbal, installed camera system) | stereographic imaging system (discrete overlapping images) | R, G, B (1” CMOS) | [310] |
| RiCOPTER VUX-SYS 1 (platform with integrated VUX1UAV LiDAR scanner) | LiDAR (multiple return, echo intensity recording) | One laser (NIR), max. 500,000 shots/s | [311] |
| Quantum systems TRON 1 Quadrocopter-fixed wing hybrid(platform with integrated YellowScan “SURVEYOR” LiDAR scanner) | LiDAR (two return) | One laser (λ = 905 nm), max. 300,000 shots/s | [309] |
| Geomorphic changes and disturbances—terrain changes, vertical displacements, elevation differences, surface deformations | |||
| COSMO Skymed 3 | DiffInSAR (in areas with no vegetation) PSI (essentially in urban areas, suited time series available for some regions) | X-band | [313] |
| TanDEM-X,TerraSAR-X 3 | DiffInSAR (in areas with no vegetation) PSI (essentially in urban areas, suited time series available for some regions) | X-band | [314,315] |
| ERS-1, ERS-2 3 | DiffInSAR (in areas with no or sparse vegetation) PSI (essentially in urban areas, suited time series from 1991 to 2003 available for several regions) | C-band | [316,317,318,319] |
| ENVISAT ASAR 3 | DiffInSAR (in areas with no or sparse vegetation) PSI (essentially in urban areas, suited time series from 2002 to 2012 available for several regions) | C-band | [316,320] |
| Sentinel-1 A/B 3 | DiffInSAR (in areas with no or sparse vegetation) PSI (essentially in urban areas, dense time series available almost globally since end of 2014) | C-band | [317,321] |
| RADARSAT-2 3 | DiffInSAR (in areas with no or sparse vegetation) PSI (essentially in urban areas, dense time series rarely available) | C-band | [322,323] |
| ALOS PALSAR 3 | DiffInSAR (in non-forested areas) PSI (essentially in urban areas, long and dense time series rarely available) | L-band | [315,320] |
| ALOS−2 PALSAR-2 3 | DiffInSAR (in non-forested areas) PSI (essentially in urban areas, long and dense time series rarely available) | L-band | [324] |
| SAOCOM3 | DiffInSAR (in non-forested areas) PSI (essentially in urban areas, long and dense time series rarely available) | L-band | [325] |
| Airborne LiDAR 2, e.g., Optech ALTM Gemini | LiDAR (four return, echo intensity recording), for changes in the order of dm or more | One laser, max. 167,000 shots/s | [71,319,326,327] |
| UAV photogrammetry 1, e.g., Octocopter X8000 (platform, gimbal, various camera systems) | stereographic imaging system (discrete overlapping images) for changes in the order of several dm or more, uniformly distributed reference targets required | R, G, B (Sony NEX7) or similar sensors | [328,329] |
| RiCOPTER VUX-SYS 1 (platform with integrated VUX1UAV LiDAR scanner) | LiDAR (multiple return, echo intensity recording), for changes in the order of dm or more | One laser (NIR), max. 500,000 shots/s | [311] |
| Mission/Platform Sensor | References | |
|---|---|---|
| Terrain and Surfaces/Traits | ||
| Geomorpho90m (90 m/100 m/250 m) (Slope, Aspect, Aspect cosine, Aspect sine, Eastness, Northness, Convergence, Compound topographic index, Stream power index, East-West first order partial derivative, North-South first order partial derivative, Profile curvature, Tangential curvature, East-West second order partial derivative, North-South second order partial derivative, Second order partial derivative, Elevation standard deviation, Terrain ruggedness index, Roughness, Vector ruggedness measure, Topographic position index, Maximum multiscale deviation, Scale of the maximum multiscale deviation, Maximum multiscale roughness, Scale of the maximum multiscale roughness, Geomorphon | (26 geomorphometric variables derived from MERIT-DEM 3/R—corrected from the underlying Shuttle RADAR Topography Mission (SRTM3) and ALOS World 3D—30 m (AW3D30) DEMs) | [24] |
| Mountain types, relief types, relief classes | IKONOS OSA 3/M, DHM25 3/R, GTOPO30–DEM 3/R, LiDAR 2/L | [330,331,332] |
| Volcano types (volcanic full forms),volcanoes, lava flow fields, hydrothermal alteration, geothermal explorations, heat fluxes, volcanoes hazard monitoring | Doves-PlanetScop, Terra/Aqua MODIS 3/M, EO-1 ALI 3/M, Landsat-8 OLI 3/M/TIR, Terra ASTER 3/M/TIR, MSG SEVIRI 3/M/TIR, LiDAR 2/L | [333,334,335,336,337] |
| Mountain hazards, mass movement (rock fall probability, boulders, denudation, mass erosion, rock decelerations, rotation changes, slope stability, rock shapes, particle shapes, patterns, structures, faults and fractures, holes and depressions) | InSAR 3/R, SAR 3/R, LiDAR 2/L, Digital Orthophoto 1/RGB | [338,339,340,341,342,343,344,345,346,347] |
| Landslide chances, landslide evolution | Digital Orthophoto 1/RGB | [348] |
| Above ground—chances, disturbances Opencast mining, sand mining and extraction, tipping, dumps | TanDEM-X 3/R, SRTM DEM 3/R, ALOS PALSAR 3/R, ERS-1 3/R, GeoEye GIS 3/M, WorldView-3 Imager 3/M, IKONOS OSA 3/M, Landsat-5 TM/-7 ETM+/-8 OLI 3/M/TIR, IRS-P6 LISS-III 3/M, High resolution satellite data of Google 3/M, LiDAR 2/L | [349,350,351,352,353,354,355] |
| Vegetation traits as proxy of the geochemical parameters | HyMAP 2/H | [356] |
| Below ground—chances, disturbances Salt mines, fracking | ERS-1/-2 3/R, ASAR 3/R, ALOS PALSAR 3/R, Landsat-5 TM/-7 ETM+/-8 OLI 3/M/TIR | [113,357] |
| Aeolian geomorphology/traits | ||
| Desertification, soil and land-degradation, soil erosion | NOAA/MetOp AVHRR 3/R, ERS−1/−2 3/R, SIR-C 3/R, ENVISAT 3/R, ASAR 3/R, RADARSAT−1 3/R, ALOS PALSAR 3/R, Terra/Aqua MODIS 3/M,, IRS1B LISS-I/LISS-II 3/M, Sentinel−2 MSI 3/M, Landsat-5 TM/−7 ETM+/-8 OLI 3/M, LiDAR 2/L | [143,144,358,359,360,361,362,363] |
| Dune migration, migration rates, dune expansion, dune activity, moving dunes | ALOS PALSAR 3/R, Landsat-8 OLI 3/M, Sentinel-2 MSI 3/M, Context Camera 2/RGB, LiDAR 2/L | [160,161,364,365,366] |
| Dune types, dune hierarchies, dune morphometry, dune hierarchies (free dunes—shifting sand dunes, bounded dunes, dune fields, dune shapes (crescent, cross, linear, stars, dome, parabolic, longitudinal dune) | SRTM 3/R, SIR-C/X-SAR 3/R, WorldView-2 WV110 3/M, IRS-RS2 LISS-IV 3/M, Cartosat-1 PAN-F/-A 3/M, Landsat-7 ETM+ 3/M, Landsat MSS 3/M, LiDAR 2/L | [152,367,368,369,370,371], |
| Dune spatial-temporal aeolic patterns (length, minimum spacing density, orientation, height, sinuosity), aeolian dune composition-configuration (complexity, diversity, shapes, patterns, heterogeneity), dune ridges (lines) | SRTM 3/R, SIR-C 3/R, Landsat-7 ETM+ 3/M, LiDAR 2/L, Digital Orthophoto 3/RGB | [150,151,152,153,154,155,366] |
| Volume and their changes, intensity of dune | SRTM 3/R, SPOT-5 HRG 3/M, Terra ASTER 3/M, LiDAR 2/L | [150,152,163,372] |
| Fluvial geomorphology/traits | ||
| Flooding events, flood mapping, flash-flood susceptibility assessment, flood inundation modelling, floodplain-risk mapping, erosive impacts, sedimentation | SRTM 3/R, ALOS PALSAR 3/R, ALSAR-1 3/R, SAR 3/R, ALOS-2 3/R, TerraSAR-X 3/R, RADARSAT-2 3/R, Sentinel-1 3/R, Landsat-5 TM/-7 ETM+/-8 OLI 3/M/TIR, Sentinel-2 MSI 3/M, IRS-1C/-1D LISS-III 3/M, IKONOS OSA 3/M, DEADALUS 2/H, LiDAR 2/L | [42,177,191,192,195,196,197,198,199,200,202,203,204,207] |
| Flood mapping under vegetation, irrigation retrieval, groundwater flooding in a lowland karst catchment | SAR 3/R, Landsat-5 TM/-7 ETM+/-8 OLI 3/M | [169,209,216] |
| Vegetation traits as proxy of the geochemical parameters, heavy metal stress in plants | HyMAP 2/H, HySPEX 2/H | [179,356] |
| River detection, small streams detection | SAR 3/R, Landsat-5 TM/-7 ETM+/-8 OLI 3/M, Aerial images 2/RGB, Aerial images 1/RGB, LiDAR 2/L | [180,262,373,374,375] |
| Channel landforms, hydrogeomorphic units including coarse woody debris, hydraulic (fluvial) landform classification, taxonomy of fluvial landforms, hydro-morphological units, riverscape units, river geomorphic units, in-stream mesohabitats, tidal channel characteristics | SAR 3/R, Aerial images 2/RGB, LiDAR 2/L | [373,376,377,378] |
| Channel characteristics, floodplain morphology hydraulic channel morphology, geometries, topography, river width arc length, longitudinal transect, (width, depth, and longitudinal channel slope, below water line morphology), Morphometric patterns of meanders (sinuosity, intrinsic wavelength, curvature, asymmetry), meander dynamics, channel geometry | SAR 3/R, ENVISAT 3/R, Terra/Aqua MODIS 3/M, Landsat-5 TM/-7 ETM+/-8 OLI 3/M, Sentinel-2 MSI 3/M, Aerial images 2/RGB, LiDAR 2/L | [222,230,233,235,236,262,379,380,381] |
| Channel migration, channel migration rates, channel planform changes, tidal channel migration Channel changes, disturbances, temporal evolution of natural and artificial abandoned channels, canal position, systematic changes of the river banks and canal centre lines | SAR 3/R, SRTM 3/R, Landsat-5 TM 3/M, Landsat-7 ETM+/-8 OLI 3/TIR, Aerial images 2/RGB | [223,224,225,226,227,228,378] |
| Flow energy of stream power, channel sensitivity to erosion and deposition processes Channel stability assessment | Landsat-1 MSS/-5 TM/-8 OLI 3/M, LiDAR 2/L | [229,382] |
| River discharge estimation (river discharge, run-off characteristics) | ENVISAT 3/R, Jason-2/-3 3/R, Sentinel-3A OLCI/SLSTR 3/R, CryoSat-2 3/R, AltiKa 3/R, ENVISAT 3/R, Advanced RADAR Altimeter (RA-2) 3/R, Terra/Aqua MODIS 3/M | [234,237] |
| Water and flow velocity | ENVISAT 3/R, Terra/Aqua MODIS 3/M, Aerial images 2/RGB, LiDAR 2/L | [235,373,383] |
| Water height, water level, water depth | ENVISAT 3/R, AMSR-E 3/R, TRMM 3/R, Daedalus 2/H, Aerial images 2/RGB, LiDAR 2/L | [237,263,373,384,385,386] |
| Fluvial sediment transport, sediment budget, channel bank erosion, exposed channel substrates and sediments, suspended soil concentration and bed material, percentage clay, silt and sand in inter-tidal sediments, suspended sediments, flood bank overbank sedimentation, sediment wave, sand mining | LiDAR 2/L, Radio frequency identification 1/RFID | [166,354,380,387] |
| Stream bank retreat | Aerial images 2/RGB, LiDAR 2/L | [239,240,241,242,243,244] |
| Grain characteristics, grain size, gravel size, shape, bed and bank sediment size | Daedalus 2/H, Aerial images 2/RGB, Aerial images 2/RGB, LiDAR 2/L | [168,388,389,390,391,392] |
| Pebble mobility | Radio frequency identification technologies 1/RFID | [393] |
| River bathymetry | CASI 2/H, Daedalus 2/H, Aerial images 2/RGB, LiDAR 2/L | [373,386,394,395,396] |
| Coastal geomorphology/traits | ||
| Coast taxonomy, coast types (Small Delta, Tidal system, Lagoon, Fjord and Fjärd, Large River, Tidal Estuary, Ria, Karst, Arheic) | Different RADAR Sensors 3/R, Different optical RS Sensors 3/R | [245] |
| Coastal dynamical and bio-geo-chemical patterns | NOAA/MetOp AVHRR 3/R, ERS-1 3/R, TOPEX 3/R, Nimbus-7 CZCS 3/M/TIR | [397] |
| Coastal landforms, coastline and shoreline detection | SRTM 3/R, ALOS 3/R, NOAA 3/R, Landsat-7 ETM+ 3/M, Terra ASTER3/M, IKONOS OSA 3/M, LiDAR 2/L | [42,398,399] |
| Spatio-temporal shoreline dynamic, shoreline erosion-accretion trends, coast changes, cliff retreat, erosion hotspots | SRTM 3/R, SAR 3/R, Landsat-4 MSS/-5 TM 3/M, Landsat-8 OLI 3/M/TIR, SPOT 5 3/M, Sentinel-2 MSI 3/M, Aerial images 2/RGB, LiDAR 2/L | [247,251,252,253,257,258,400,401] |
| Different morphometric shoreline indicators (morphological reference lines, vegetation limits, instant tidal levels and wetting limits, tidal datum indicators, virtual reference lines, beach contours, storm lines) | Different optical RS Sensors 3/M, LiDAR 2/L | [161,246,402] |
| Mission/Platform Sensor UAV 1 Airborne 2 Spaceborne 3 | Sensor Type | Frequency/Spectral Information | Launch Time | References |
|---|---|---|---|---|
| BIOMASS 3 | repeat pass InSAR, repeat pass fully polarimetric InSAR (PolInSAR), SAR Tomography (TomoSAR) | P-band | 2021 | [403] |
| SAOCOM 1A 3 SAOCOM 1B 3 SAOCOM-CS 3 | repeat pass InSAR (SAOCOM 1A & 1B), single pass PolInSAR (SAOCOM 1B & CS) Terrain observation with Progressive Scans SAR (TopSAR) | L-band | 2018/2019 | [404] |
| NiSAR 3 | repeat pass InSAR | L-band S-band | >2022 | [405] |
| ALOS-4 PALSAR-3 3 | repeat pass InSAR | L-band | 2020 | [406] |
| Tandem-L 3 | single pass InSAR, single pass PolInSAR, multi-pass coherence tomography | L-band | 2024 | [407,408] |
| ROSE-L | repeat pass InSAR | L-band | 2028 | [409] |
| NovaSAR-S 3 | single pass InSAR | S-band | 2018 | [410,411] |
| GEDI LiDAR 3 | LiDAR (full waveform) | 3 laser transmitter, 1064 nm | 2019 | [45,122,123,412] |
| ICEsat-2 3 | LiDAR (full waveform) | 1 laser 6 beams, 532 nm (ATLAS) | 2018 | [124,130,131] |
| Data Products | Scale | Link | References |
|---|---|---|---|
| Various DEMs | Global | Planetobserver: https://www.planetobserver.com/products/planetdem/planetdem-30/ | [278] |
| NEXTMap® Elevation Data Suite | Global | https://www.intermap.com/nextmap | [279] |
| TEMIS-GTOPO30 global digital elevation model (GDEM)—30 m | Global | http://www.temis.nl/data/gtopo30.html | [413,414] |
| GTOPO30 Earth Resources Observation and Science Center/U.S. Geological Survey/U.S. Department of the Interior, USGS 30 ARC-second Global Elevation Data, GTOPO30 (Research Data Archive at the National Center for Atmospheric Research, Computational and Information Systems Laboratory, 1997) | Global | http://rda.ucar.edu/datasets/ds758.0/. | [415] |
| ASTER GDEM V3 ASTER Global Digital Elevation Model (GDEM) Version 3 (ASTGTM)1 arc second | Global | https://lpdaac.usgs.gov/products/astgtmv003/ DOI:10.5067/ASTER/ASTGTM.003 | [88] |
| ALOS Global Digital Surface Model “ALOS World 3D (AW3D30)” 30 m PRISM DEM | Global | http://www.eorc.jaxa.jp/ALOS/en/aw3d30/ | [90,297] |
| SRTM 30 m, 90 m, 1 km Elevation Data | Global | http://www.landcover.org/data/srtm/ https://developers.google.com/earth-engine/datasets/catalog/USGS_SRTMGL1_003 | [416] |
| SRTM/SRTM NASA V2 | Global | https://dds.cr.usgs.gov/srtm/ https://www2.jpl.nasa.gov/srtm/ | [293,417] |
| SRTM Plus/SRTM NASA V3 | Global | https://lpdaac.usgs.gov/products/measures_products_table | [101,102] |
| ALOS DSM: 30 m | Global | https://developers.google.com/earth-engine/datasets/catalog/JAXA_ALOS_AW3D30_V1_1 http://www.eorc.jaxa.jp/ALOS/ | [418] |
| NASADEM | Global | en/aw3d30/ | [102] |
| TanDEM-X DEM WorldDEM | Global | https://tandemx-science.dlr.de/cgi-bin/wcm.pl?page=DEM_Promotion_Start_Page (free samples for scientific purposes) http://www.intelligence-airbusds.com/worlddem/ (commercial) | [103] |
| ICESat/GLAS | Global | https://nsidc.org/data/icesat/data.html | [301,329] |
| GEDI LiDAR | Global | https://gedi.umd.edu/data/products/ | [122] |
| Global Land Survey Digital Elevation Model (GLSDEM) | Global | http://www.landcover.org/data/glsdem/ | [419] |
| Global ALOS Landforms | Global | https://developers.google.com/earth-engine/datasets/catalog/CSP_ERGo_1_0_Global_ALOS_landforms | [420] |
| Global ALOS Topographic Diversity | Global | https://developers.google.com/earth-engine/datasets/catalog/CSP_ERGo_1_0_Global_ALOS_topoDiversity | [420] |
| Global ALOS CHILI (Continuous Heat-Insolation Load Index) | Global | https://developers.google.com/earth-engine/datasets/catalog/CSP_ERGo_1_0_Global_ALOS_CHILI | [420] |
| Global ALOS mTPI (Multi-Scale Topographic Position Index) | Global | https://developers.google.com/earth-engine/datasets/catalog/CSP_ERGo_1_0_Global_ALOS_mTPI | [420] |
| GMTED2010: Global Multi-resolution Terrain Elevation Data 2010 | Global | https://developers.google.com/earth-engine/datasets/catalog/USGS_GMTED2010 | [272] |
| Free Global DEM Data Sources–Digital Elevation Models | Global | https://gisgeography.com/free-global-dem-data-sources/ | NA |
| The global Human Modification dataset (gHM) | Global | https://developers.google.com/earth-engine/datasets/catalog/CSP_HM_GlobalHumanModification | [421] |
| Copernicus DEM—Global and European Digital Elevation Model (COP-DEM) | Global/EEA39* | https://spacedata.copernicus.eu/web/cscda/dataset-details?articleId=394198 | [422] |
| Geomorpho90m (90 m/100 m/250 m) (26 geomorphometric variables derived from MERIT-DEM—corrected from the underlying Shuttle RADAR Topography Mission (SRTM3) and ALOS World 3D—30 m (AW3D30) DEMs) Slope, Aspect, Aspect cosine, Aspect sine, Eastness, Northness, Convergence, Compound topographic index, Stream power index, East-West first order partial derivative, North-South first order partial derivative, Profile curvature, Tangential curvature, East-West second order partial derivative, North-South second order partial derivative, Second order partial derivative, Elevation standard deviation, Terrain ruggedness index, Roughness, Vector ruggedness measure, Topographic position index, Maximum multiscale deviation, Scale of the maximum multiscale deviation, Maximum multiscale roughness, Scale of the maximum multiscale roughness, Geomorphon | Global | http://www.spatial-ecology.net/dokuwiki/doku.php?id=topovar90m https://doi.pangaea.de/10.1594/PANGAEA.899135 https://portal.opentopography.org/dataspace/dataset?opentopoID=OTDS.012020.4326.1 | [24] |
| Physiography | US | https://developers.google.com/earth-engine/datasets/catalog/CSP_ERGo_1_0_US_physiography | [420] |
| Physiographic Diversity | US | https://developers.google.com/earth-engine/datasets/catalog/CSP_ERGo_1_0_US_physioDiversity | [420] |
| OpenTopography High-Resolution Topography Data and Tools | Global/Regional/Local | https://opentopography.org/ | NA |
| Airborne LiDAR data Open Topography High-Resolution Topography Data and Tools | Regional | http://gisgeography.com/top-6-free-lidar-data-sources/ http://www.geoportal-th.de/de-de/Downloadbereiche/Download-Offene-Geodaten-Th%C3%BCringen http://opentopography.org (US-based, but world-wide coverage) | [319,327] |
| RS Global Airborne Laser Scanning Data Providers Database (GlobALS) | Global/Regional | https://www.facebook.com/GlobALSData/) to | [423] |
| Australia’s terrestrial ecosystem data | Australia | TERN data Portal https://portal.tern.org.au/#/1a471b0a | NA |
| Supra National Ground Motion Service | Global/Regional/Local | Yearly Sentinel-1 based product s for public (first release 2019) TerraSAR-X/TanDEM-X based product on request for commercial use | [424] |
| Terrafirma Atlas | Global/Regional/Local | http://www.terrafirma.eu.com/ Open service partnership, production on request | [424,425] |
| Incomplete Inventory Surface Deformation in North America | Regional | catalogue with sites of suspected anthropogenic deformation, deformation data | [426] |
| ArcticDEM Mosaic | Regional | https://developers.google.com/earth-engine/datasets/catalog/UMN_PGC_ArcticDEM_V3_2m_mosaic | [427,428,429] |
| EU-DEM, Slope, Aspect, Hillshade | EEA39 ** | https://land.copernicus.eu/product-portfolio/overview | NA |
| GeoNetworksMultisource, multisensor geospatial data and measurements of mountain areas | Global | (https://geonetwork-opensource.org/) | [430] |
| Global River Widths from Landsat (GRWL) Database | Global | https://doi.org/10.1126/science.aat063 | [374] |
| GFPLAIN250m, a global high-resolution dataset of earth’s floodplains | Global | https://github.com/fnardi/GFPLAIN with | [431] |
| MERIT Hydro: A High-Resolution Global Hydrography Map Based on Latest Topography Dataset. | Global | http://hydro.iis.u-tokyo.ac.jp/~yamadai/MERIT_Hydro/ | [432] |
| Dataset of 100-year flood susceptibility maps | US | https://data.4tu.nl/articles/100-year_flood_susceptibility_maps_for_the_continental_U_S_derived_with_a_geomorphic_method/12693680 | [433] |
| Global Flood Hazard | Global | https://data.jrc.ec.europa.eu/collection/floods | [434] |
| Modis Flood Mapping | Global | https://floodmap.modaps.eosdis.nasa.gov/ | [435] |
| Map of Active Volcanoes and recent Earthquakes world-wide | Global | https://earthquakes.volcanodiscovery.com/ | NA |
| Volcano hazard monitoring | US | https://www.usgs.gov/natural-hazards/volcano-hazards/ | [333] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lausch, A.; Schaepman, M.E.; Skidmore, A.K.; Truckenbrodt, S.C.; Hacker, J.M.; Baade, J.; Bannehr, L.; Borg, E.; Bumberger, J.; Dietrich, P.; et al. Linking the Remote Sensing of Geodiversity and Traits Relevant to Biodiversity—Part II: Geomorphology, Terrain and Surfaces. Remote Sens. 2020, 12, 3690. https://doi.org/10.3390/rs12223690
Lausch A, Schaepman ME, Skidmore AK, Truckenbrodt SC, Hacker JM, Baade J, Bannehr L, Borg E, Bumberger J, Dietrich P, et al. Linking the Remote Sensing of Geodiversity and Traits Relevant to Biodiversity—Part II: Geomorphology, Terrain and Surfaces. Remote Sensing. 2020; 12(22):3690. https://doi.org/10.3390/rs12223690
Chicago/Turabian StyleLausch, Angela, Michael E. Schaepman, Andrew K. Skidmore, Sina C. Truckenbrodt, Jörg M. Hacker, Jussi Baade, Lutz Bannehr, Erik Borg, Jan Bumberger, Peter Dietrich, and et al. 2020. "Linking the Remote Sensing of Geodiversity and Traits Relevant to Biodiversity—Part II: Geomorphology, Terrain and Surfaces" Remote Sensing 12, no. 22: 3690. https://doi.org/10.3390/rs12223690
APA StyleLausch, A., Schaepman, M. E., Skidmore, A. K., Truckenbrodt, S. C., Hacker, J. M., Baade, J., Bannehr, L., Borg, E., Bumberger, J., Dietrich, P., Gläßer, C., Haase, D., Heurich, M., Jagdhuber, T., Jany, S., Krönert, R., Möller, M., Mollenhauer, H., Montzka, C., ... Thiel, C. (2020). Linking the Remote Sensing of Geodiversity and Traits Relevant to Biodiversity—Part II: Geomorphology, Terrain and Surfaces. Remote Sensing, 12(22), 3690. https://doi.org/10.3390/rs12223690