1. Introduction
In recent years, along with the continuous development of the high-resolution Earth observations, remote sensing, communication and navigation based on low Earth orbit (LEO) satellites, real-time, precise and reliable orbits of LEO platforms are crucial for many space applications, such as altimetry, gravimetry, synthetic aperture radar (SAR) interferometry, atmospheric sounding or navigation signal augmentation [
1,
2,
3]. Precise onboard real-time orbit determination (RTOD) using the space-borne data of a global navigation satellite system (GNSS) is recognized as the mainstream navigation technology for LEO satellites, due to its global coverage, abundant observations and low cost. The onboard RTOD, as the name implies, is the process of real-time orbit determination completed in the embedded system onboard satellites. It has no dependence on ground-based tracking assets, and the orbit results are required to be delivered within minutes, seconds or even a fraction of a second after observations are made. Although high-precision GNSS orbits and high-rate clocks have been widely used in post-processing precise orbit determination (POD), they are not always available in real time for LEO satellites. Therefore, in general, only the GNSS broadcast ephemeris is available for the onboard RTOD due to its real-time and autonomous requirements.
Over the past 30 years, the onboard RTOD using the space-borne data of America’s Global Positioning System (GPS) has been in continuous developments and applied to many LEO satellites. The Goddard Space Flight Center (GSFC) began research on the onboard RTOD algorithm and developed the GPS Enhanced Orbit Determination Experiment (GEODE) space flight navigation software in the 1990s [
4]. The 3-dimensional (3D) position and velocity accuracies of the onboard RTOD using dual-frequency GPS pseudo-range measurements were about 7.8 m and 5.9 mm/s, respectively, when applied to process the space-borne data of the TOPEX satellite collected in the absence of selective availability (SA) [
5]. The position accuracy was improved to 1.0 m when using SA-free data after Goldstein’s updates to the algorithm of GEODE [
6]. NASA’s Jet Propulsion Laboratory (JPL) also developed the Real-Time GIPSY (RTG) software for the onboard RTOD, and the orbit results with a position accuracy of 1.5 m were obtained when RTG was applied to process the dual-frequency pseudo-range measurements of the SAC-C satellite [
7]. The German Aerospace Center (DLR) developed a high-precision onboard RTOD algorithm for BIRD, X-SAT, SunSat and PROBA-2 satellites [
8,
9,
10,
11]. Tests demonstrated that the onboard RTOD could provide real-time navigation accuracy at the 1.0 m level. Montenbruck et al. [
12] were the first to present the onboard RTOD algorithm using GPS carrier-phase measurements. A series of experiments were made on various LEO satellites, such as CHAMP, GRACE, TerraSAR-X, ICESat, SAC-C and MetOp, and the tests demonstrated that a real-time position accuracy of about 0.5 m was feasible with dual-frequency carrier-phase measurements. A detailed study into the error sources for the onboard RTOD was also conducted in our past research [
13,
14,
15,
16], which revealed that the orbit and clock offset errors of the GPS broadcast ephemeris in the line-of-sight (LOS) are the main factors in restricting the accuracy improvement of onboard RTOD. Therefore, a new RTOD method was presented, where a large part of the LOS error could be absorbed into a new estimated parameter, named pseudo-ambiguity, which combines the phase ambiguity, the orbit and clock offset errors of the GPS broadcast ephemeris together [
15]. The experiments of processing real data of China’s HY2A and ZY3 satellites demonstrated that the position and velocity accuracies of 0.3–0.5 m and 0.3–0.5 mm/s, respectively, were achieved using dual-frequency GPS carrier phases [
16].
For most LEO satellites, only space-borne GPS observations are available, so the research and experiments of the onboard RTOD in the past were usually based on GPS measurements. With the construction and development of other GNSSs such as China’s BeiDou Navigation Satellite System (BDS) [
17], Russia’s Global Navigation Satellite System (GLONASS) [
18] and Europe’s Galileo Navigation Satellite System (Galileo) [
19], the onboard RTOD based on multiple GNSS (multi-GNSS) integration has become possible. BDS, the global navigation system developed by China, provides an additional data source to the LEO orbit determination. A few Chinese LEO satellites, such as FengYun-3C [
20], are equipped with the GPS/BDS receivers. The FengYun-3C satellite, a Chinese meteorological satellite launched in 2013, was equipped with a GNSS occultation sounder (GNOS) instrument which could provide dual-frequency pseudo-range and carrier-phase data of GPS and the earlier regional BDS (BDS-2). It should be noted that the global BDS (BDS-3) was not available at that time, and the GNOS was designed only to track BDS-2 satellites, as well as GPS satellites; nevertheless, post-POD processing of the FengYun-3C satellite using GPS and BDS-2 measurements has been carried out, and high-precision orbit results at centimeter level have been obtained [
21,
22]. Hence, this paper focuses on the onboard RTOD algorithm and experiments for processing the space-borne GPS and BDS-2 data of the FengYun-3C satellite. In order to achieve decimeter precision, the solution using both high-precision carrier-phase and pseudo-range data, the same as the algorithm presented occasionally in previous literature [
12,
13,
14,
15,
16], is still adopted, where the pseudo-ambiguity parameter combining the phase ambiguity, the orbit and clock offset errors of the GNSS broadcast ephemeris in the line-of-sight (LOS) together is defined for each visible GNSS satellite, and estimated to absorb a large part of the LOS error [
15,
16]. Obviously, the stochastic modeling of pseudo-ambiguity decides whether it can be estimated reasonably and the LOS error could be absorbed effectively or not. Along with the use of multi-GNSS data, it is very important to obtain the optimal stochastic models of the pseudo-ambiguity for different types of GNSS satellites whose broadcast ephemeris error may show different variation characteristics. Therefore, this paper first analyzes the variation characteristics of the LOS error for different GNSS satellites in-depth, including the GPS satellites and the BDS satellites on the geosynchronous, inclined geosynchronous and medium Earth orbits (GEO/IGSO/MEO), and then derives out the reasonable stochastic model of the pseudo-ambiguity. A numerical search approach is presented to find the optimal stochastic model setting for each type of these GNSS satellites. Furthermore, the analysis on the model optimization will be performed in detail, and a series of discussion will be conducted which presents the effect of the pseudo-ambiguity with optimal modeling on the onboard RTOD. In addition, the analyses will be carried out about the effect of GPS/BDS fusion on the availability of GNSS satellites, orbit accuracy, filter convergence and reliability of the onboard RTOD. All the onboard RTOD experiments are made with the self-developed software SATPODS (Space-borne GNSS AuTonomous Precise Orbit Determination Software). The post-high-precision (2–4 cm) POD orbits from the PANDA (Positioning and Navigation Data Analyst) software [
23] will be used as a reference for the accuracy assessment of the onboard RTOD results.
In the following section, the basic algorithm of onboard RTOD will be briefly introduced first, including the dynamical models, GNSS measurements and parameter estimation equation. Secondly, the orbit and clock offset error in the line-of-sight (LOS) caused by the GPS/BDS broadcast ephemeris will be analyzed in-depth, followed by the stochastic modeling of the pseudo-ambiguity parameter. Then, a numerical search approach will be presented and tested to find the optimal setting of the stochastic model of pseudo-ambiguity. Afterward, based on the onboard RTOD experiment results with the optimal stochastic model, the absorption effect of the estimated pseudo-ambiguity on the LOS error in the GPS/BDS broadcast ephemeris will be discussed and analyzed in-depth, as well as the impact of GPS/BDS fusion on the onboard RTOD. Finally, some summarized discussions and conclusions are made.
4. Orbit Results Analysis
A series of numerical tests will be carried out to search the optimal setting of the stochastic model of the pseudo-ambiguity parameter for each type of GPS/BDS satellite. Based on the onboard RTOD test results with the optimal stochastic model of pseudo-ambiguity, the absorption effect of the estimated pseudo-ambiguity on the LOS error in the GNSS broadcast ephemeris will be analyzed in-depth. At the same time, the analyses will be performed on the impact of GPS/BDS fusion on the availability of GNSS satellites, orbit accuracy, filter convergence and reliability of the onboard RTOD. In addition, it should be noted that the space-borne GPS/BDS data of the FengYun-3C satellite are not publicly available for users, and the data we can use are limited, so only three datasets that cover from DOY 69, 2015, through DOY 75, 2015, from DOY 33, 2018, through DOY 39, 2018, and from DOY 275, 2013, through DOY 300, 2013, will be processed by SATPODS to verify the effect of GPS/BDS fusion. It must be emphasized that the GNSS receiver onboard FengYun-3C can only track GPS satellites and the GEO, IGSO and MEO satellites of the earlier regional BDS-2, as per the receiver design back to 2013. In other words, the receiver on FengYun-3C is not able to track the operating BDS-3 satellites. At the same time, the main property of LOS errors caused by the GNSS broadcast ephemeris, shown in
Figure 1, remains unchanged over the time. Therefore, the stochastic models of the pseudo-ambiguity are applicable to GNSS tracking data in any time, albeit the optimal settings are needed from time to time, which motivated the research presented in this paper. Hence, it can be inferred that the developed optimal setting method, which is experimented with these three datasets in 2013, 2015 and 2018, is generally applicable to any data at any other time, as long as the error property of the data is the same.
4.1. Numerical Search Tests
In the numerical search tests, the datasets of the FengYun-3C satellite that cover from DOY 69, 2015, through DOY 75, 2015, are processed by SATPODS. The software is capable of simulating the onboard operation scene. The strategies take the autonomy, timing and accuracy requirements of onboard RTOD into account. Only the GPS/BDS broadcast ephemeris is used, and the pseudo-ambiguities are estimated instead of the true constant ambiguities. Then, the dynamical models are simplified to the maximum extent to reduce the computational load. At the same time, the neglected perturbations, including the ocean and pole tide, earth radiation and relativistic effect, are small enough and have no notable effect on the real-time orbit accuracy. In addition, only simplified precession and nutation models and rapid predicted Earth orientation parameters (EOP) are applied for the transformation of coordinate systems. All the specific model settings are listed in
Table 3. Furthermore, in order to assess the orbit accuracies from SATPODS, the precise orbit results generated by PANDA are used as references. The accuracy of the post-POD orbit results generated by PANDA are at the 2–4 cm level [
23], so they can be treated as the reference to assess the real-time orbit accuracy.
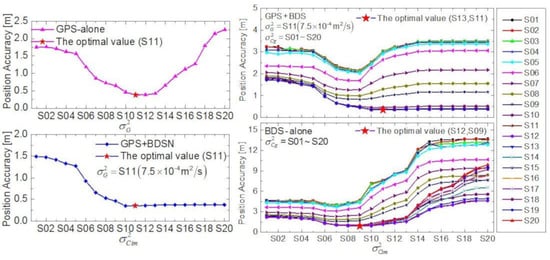
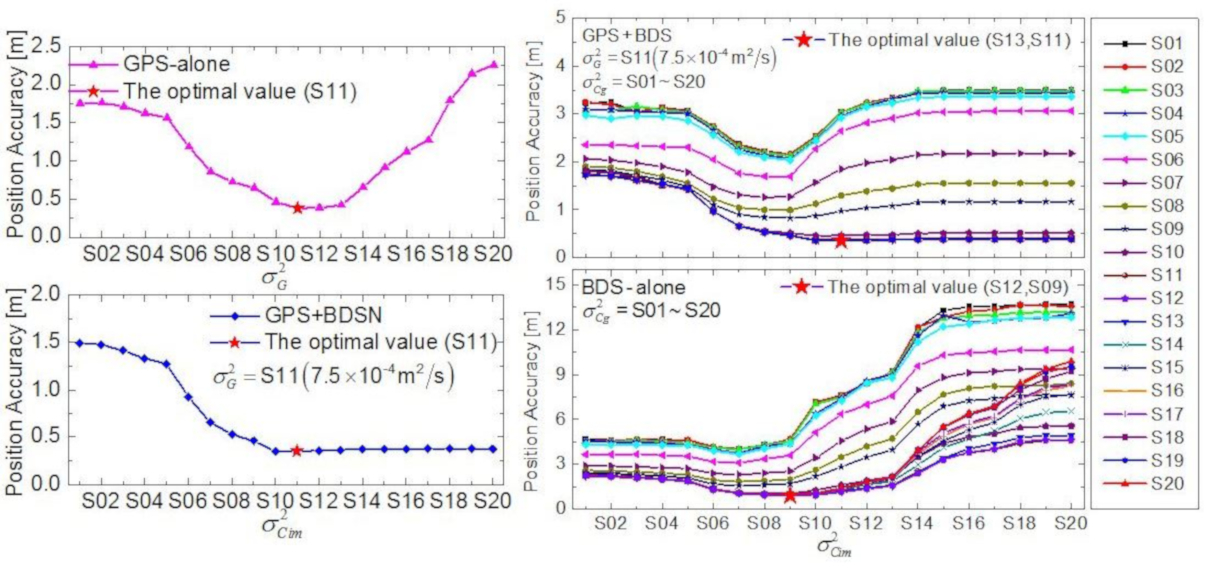
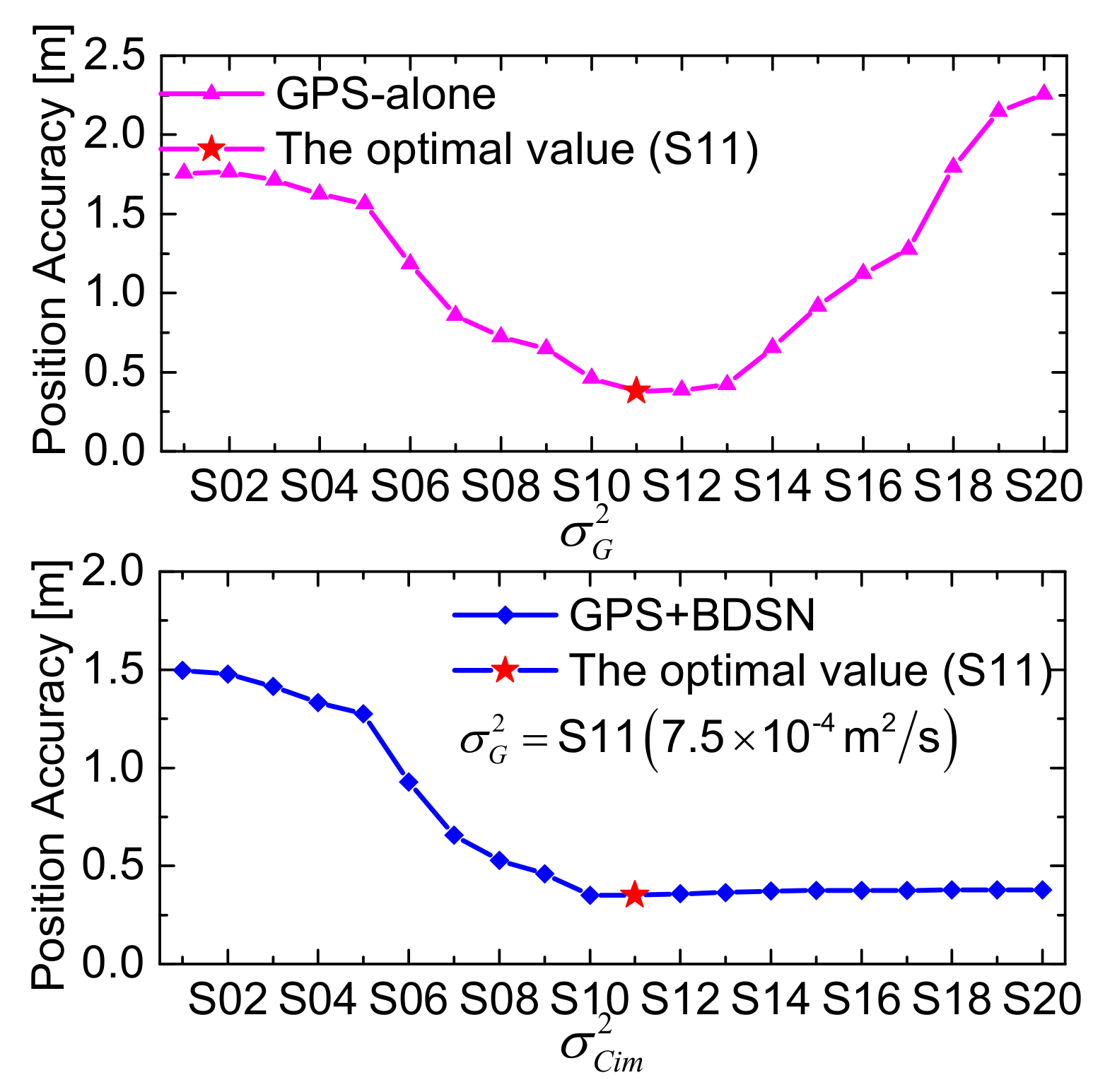
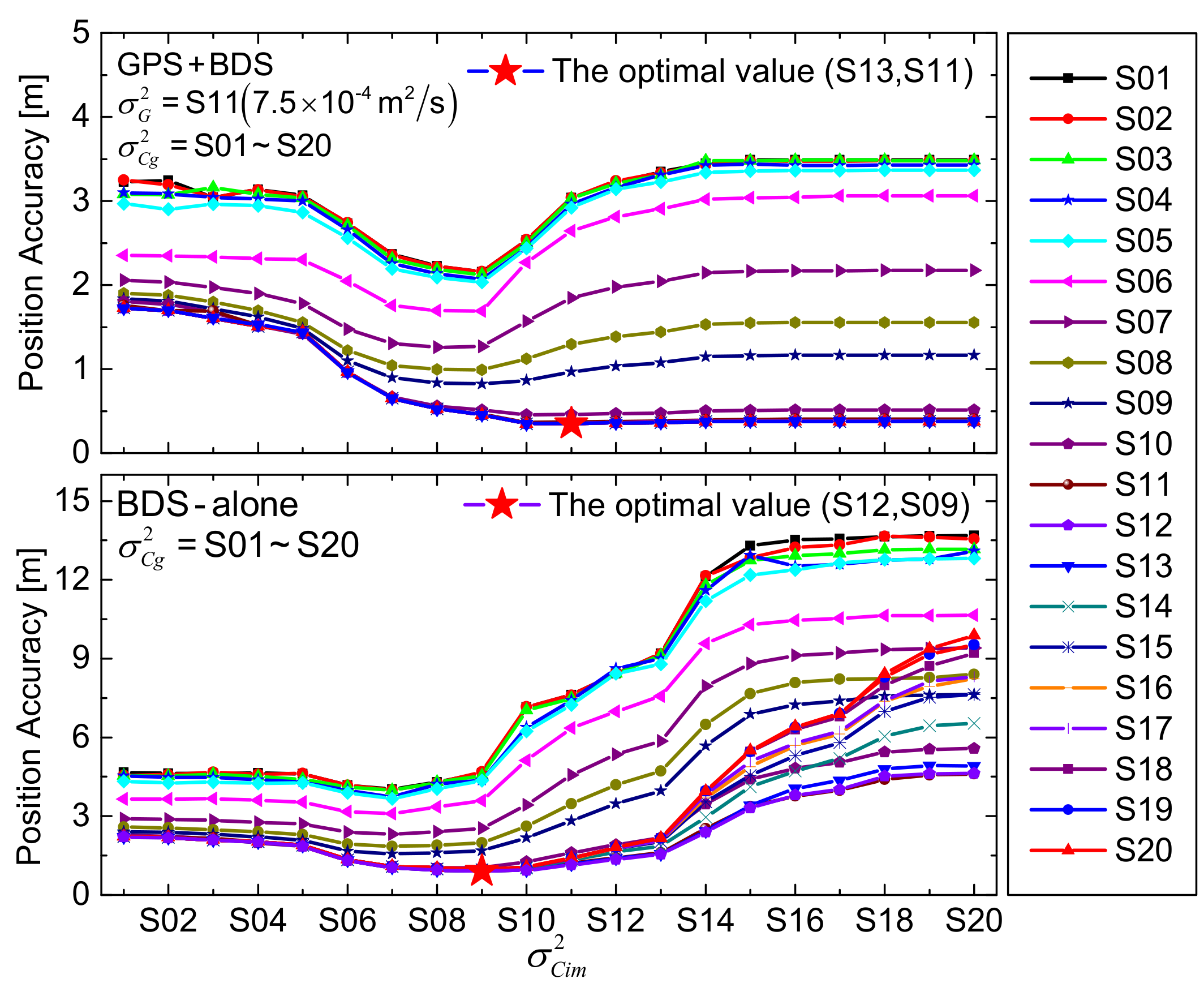
The optimal values of
will be determined by the onboard RTOD tests with four types of solutions: (a) dual-frequency GPS ionosphere-free phase and pseudo-range measurements are used, and the solution is abbreviated as “GPS-alone”; (b) dual-frequency measurements of GPS and BDS IGSO/MEO satellites are used, and the solution is shorted as “GPS+BDSN”, where BDSN means the BDS GEO satellites are not included; (c) the solution using dual-frequency measurements of GPS and BDS satellites is shorted as “GPS+BDS”; (d) the solution only using BDS dual-frequency measurements is abbreviated as “BDS-alone”. The orbit accuracy of the onboard RTOD test will change when the values of
vary. The orbit accuracies (3D RMS) of the onboard RTOD trials for the GPS-alone and GPS+BDSN solutions in DOY 69─75, 2015, are shown in
Figure 2, and the results of the GPS+BDS and BDS-alone solutions are illustrated in
Figure 3. As can be observed clearly, the orbit accuracy of the GPS-alone solution is improved from 1.757 to 0.381 m monotonically when
increases from S01 to S11, but the accuracy deteriorates from 0.381 to 2.256 m if
increases from S11 to S20 continuously. So, for the GPS-alone solution, S11 is the optimal value of
, which corresponds to the best orbit accuracy of 0.381 m for 3D position. For the GPS+BDSN solution,
is fixed with S11 being the optimal value of the GPS-alone solution, but
varies from S01 to S20. The optimal
is again S11 with which the best orbit accuracy of 0.349m is achieved. For the GPS+BDS solution,
also takes the optimal value S11, and both
and
range from S01 to S20, therefore 400 trials will be conducted. The orbit accuracies of all 400 trials are shown in 20 curves, where each curve corresponds to a fixed value of
and 20 values of
. When
take the values of (S13, S11), the best orbit accuracy of 0.348 m is obtained. Similarly, for the BDS-alone solution, both
and
change from S01 to S20, and the best accuracy of 0.899 m is achieved when
take the value of (S12, S09).
Table 4 lists the optimal values of
for the four solutions and the corresponding best orbit accuracies. In the GPS+BDS solution, the optimal values of
for the BDS GEO and IGSO/MEO satellites are (S13, S11). The optimal setting for BDS IGSO/MEO satellites is the same as that of GPS satellites. The optimal value for BDS IGSO/MEO satellites in the GPS+BDSN solution is also the same as that in the GPS+BDS solution. This proves the consistency of pseudo-ambiguity stochastic models for the same types of GNSS satellites. However, if only BDS measurements are used, the optimal values of
are (S12, S09), not (S13, S11), and a merely inferior orbit accuracy of 1.164 m is obtained if (S13, S11) are adopted. The different optimal values of
for BDS satellites in the GPS+BDS and BDS-alone solutions demonstrate that the stochastic model setting of pseudo-ambiguity not only depends on its own characteristics but also relates to the measurements in the Kalman filter. In addition, the optimal setting of pseudo-ambiguity does not match the statistics value of
based on the true LOS error in
Table 1 very well. This also illustrates that the optimal setting of the stochastic model in the filter seems to be correlated with multiple factors, such as the characteristics of estimated parameters, the measurement errors, data distribution and so on.
4.2. Effect of Pseudo-Ambiguity
The numerical search tests indicate that the real-time orbit accuracy (3D RMS) of superior to 0.4 m for position could be achievable with the optimal stochastic model of pseudo-ambiguity in the GPS + BDS solution, which is much better than not only the accuracy of 1.0 m level in the solution of using single pseudo-range data [
25] but also that of those GPS + BDS solutions with an inferior stochastic model setting. One reason for the accuracy improvement is that the measurement noise of carrier-phase data is very low. More importantly, the estimated pseudo-ambiguities absorb a large part of the LOS error caused by the GNSS broadcast ephemeris.
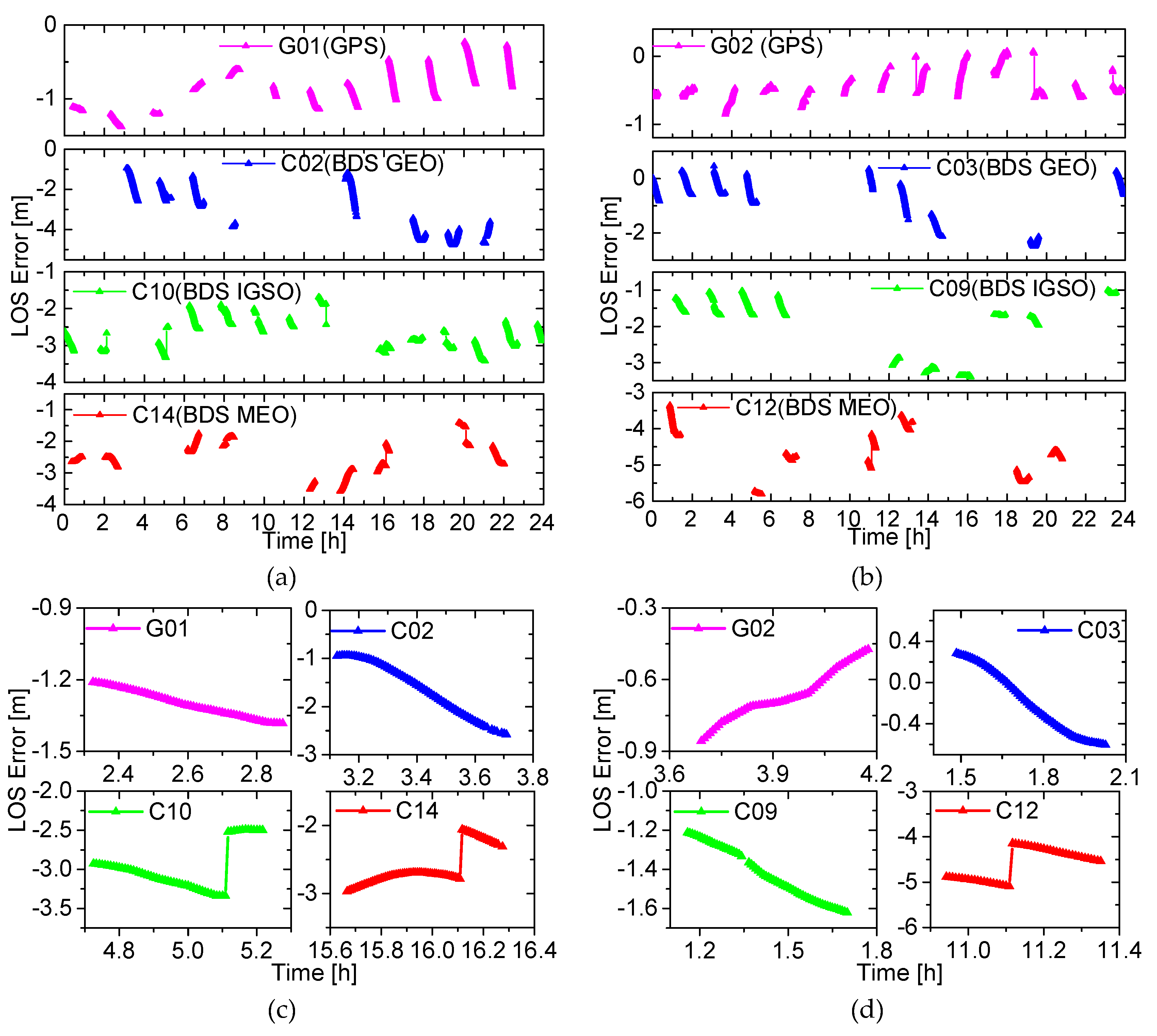
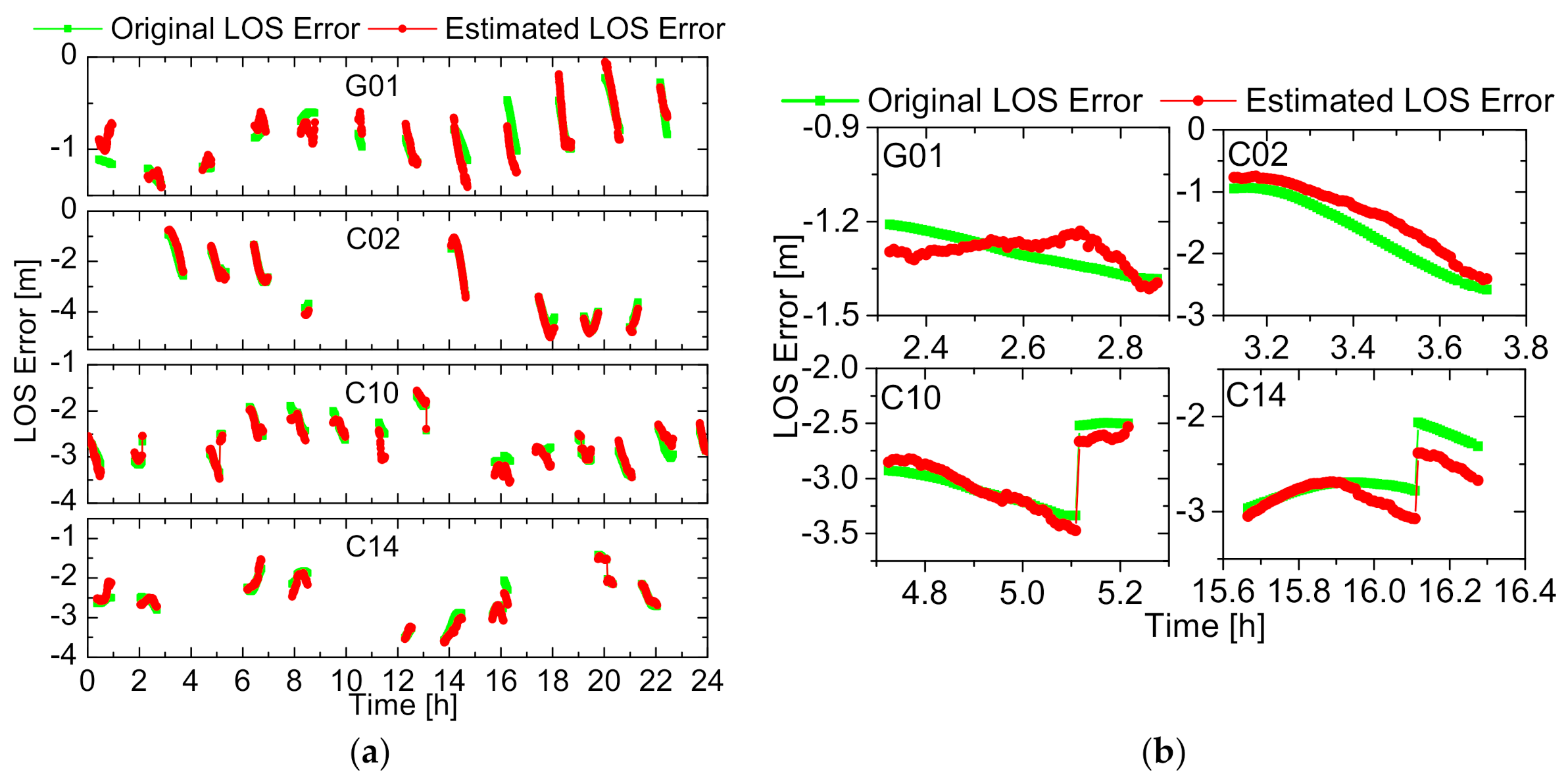
Figure 4 shows the original true LOS error and the estimated LOS error fused in the pseudo-ambiguity of G01/C02/C10/C14 satellites on DOY 71, 2015. To separate the estimated LOS error from the pseudo-ambiguity, the true ambiguity in the pseudo-ambiguity is computed by the post-POD. As can be seen clearly, the two LOS error curves in sub-graph (a) present the same trend, indicating that the LOS error caused by the GNSS broadcast ephemeris is well absorbed through the estimate of the pseudo-ambiguity. The two LOS error curves in several special tracking arcs as shown in
Figure 1 are also zoomed in and presented in sub-graph (b). Obviously, the LOS errors for both GPS and BDS satellites are well absorbed. Even though there is an ephemeris switch for the latter two arcs, the LOS errors are still well estimated due to enlarging the variance of the corresponding pseudo-ambiguity. All results demonstrate that the estimated pseudo-ambiguity can absorb the LOS error and improve the real-time orbit accuracy effectively.
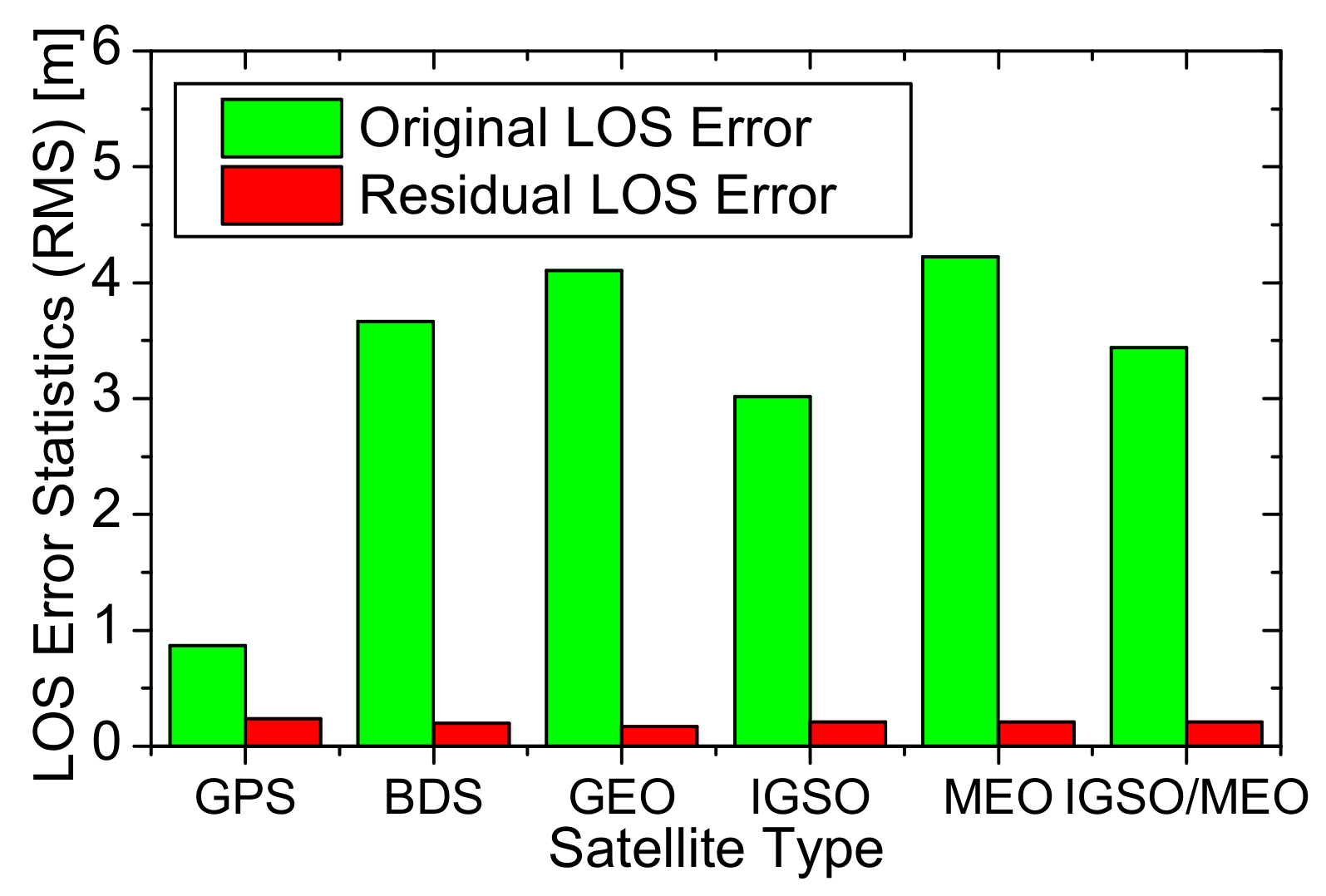
Figure 5 shows the overall statistics of the original LOS errors and the residuals after pseudo-ambiguity estimation for each type of GPS/BDS satellite at DOY 69–75, 2015. As can be observed, the original LOS error statistic (RMS) of GPS satellites is 0.869 m and most of the LOS errors are absorbed into the estimated pseudo-ambiguity parameters, so the residual LOS errors are reduced to 0.236 m. The original LOS errors of BDS satellites are up to 3–5 m, which is caused by the poor orbit and clock accuracy of the BDS broadcast ephemeris, and the different reference clock in the broadcast ephemeris and GFZ’s precise clock products. Although the difference of the reference clocks is not excluded in the original LOS errors, it integrates into the estimated receiver clock and has no effects on the absorption of the pseudo-ambiguity. According to the statistics, the residual LOS errors of all BDS satellites are only 0.197 m, of which 0.172 m for GEO and 0.207 m for IGSO/MEO satellites. The reason for the slightly smaller residual LOS error of BDS satellites compared to that of GPS satellites is probably that the BDS measurements do not play a leading role for the GPS/BDS fusion solution. When GPS measurements are used, other estimated common parameters such as position and receiver clock are constrained tightly. Thus, with the constrained common parameters, the LOS error could be absorbed into the estimated pseudo-ambiguities of BDS satellites more effectively once BDS measurements are added. As a whole, the residual LOS errors of GPS/BDS satellites are reduced to the 0.2 m level due to the absorption effect of the pseudo-ambiguity, which is a contributing factor to the orbit results with the accuracy of 0.348 m for the GPS + BDS solution.
4.3. Impact of GPS/BDS Fusion
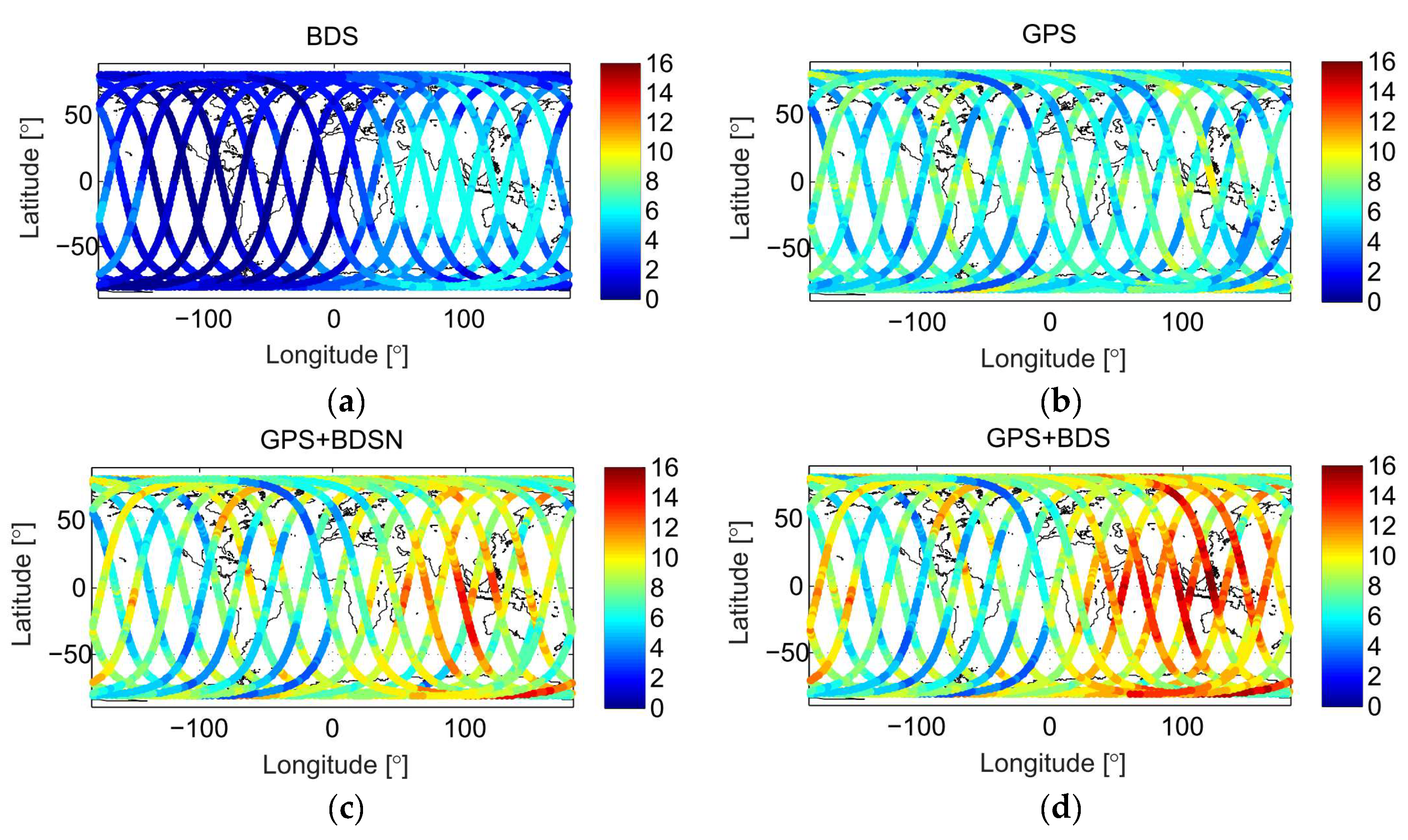
The most intuitive difference of different GPS/BDS fusion solutions is reflected in the number of tracked GNSS satellites, which is shown in
Figure 6. For the GPS/BDS receiver onboard the FengYun-3C satellite, only the BDS-2 regional navigation system could be tracked. Thus, it can only observe four–six BDS satellites in the Asia/Pacific region and less than four satellites in other regions for the BDS-alone solution. GPS is a global navigation system with full operational capability, so more than four GPS satellites can be tracked by FengYun-3C in most places of the world. Compared to the GPS-alone or BDS-alone solution, the GPS + BDSN and GPS+BDS solutions increase the number of tracked GNSS satellites notably, especially in the Asia/Pacific region where GEO/IGSO satellites of BDS are tracked easily and two–six BDS satellites are added.
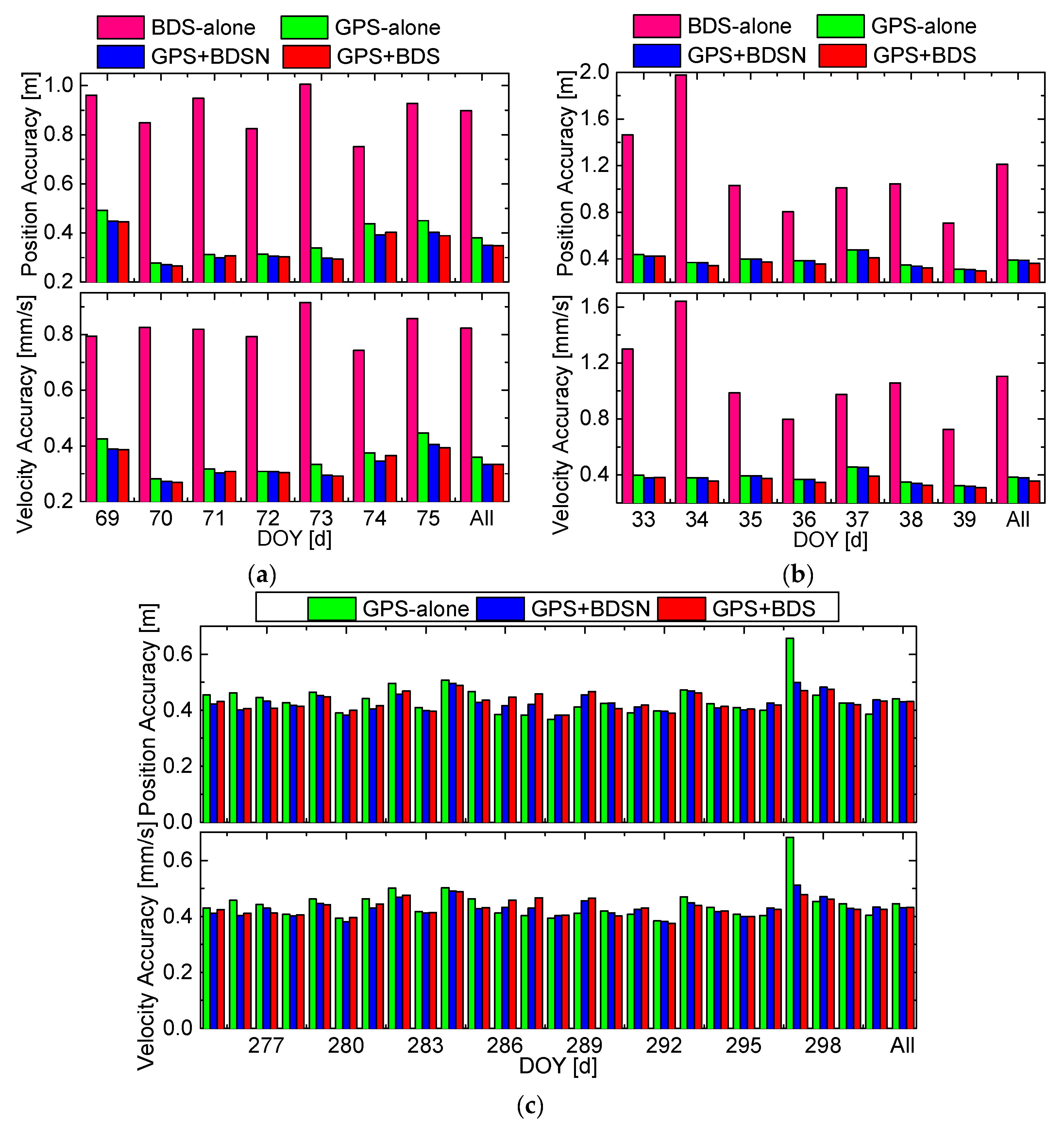
One should note that the increase in the number of tracked GNSS satellites does not mean the same increase for the real-time orbit accuracy. The daily position and velocity accuracies (3D RMS) with four GPS/BDS fusion solutions at DOY 69–75, 2015, DOY 33–39, 2018, and DOY 275–300, 2013, are shown in
Figure 7, respectively. The label “All” is for the whole interval. According to sub-graphs (a) and (b), if only using BDS measurements, due to a few tracked BDS satellites and the obvious orbit and clock errors caused by the BDS broadcast ephemeris, the daily orbit accuracy is between 0.7 and 2.0 m for position and 0.7 and 1.7 mm/s for velocity. If only using GPS measurements, the daily orbit accuracy is improved dramatically by 0.3–0.5 m for position and 0.3–0.5 mm/s for velocity. Obviously, the orbit accuracy of using GPS-alone data is fairly superior to that of using BDS-alone data. However, the orbit accuracies of GPS + BDSN and GPS + BDS solutions are only slightly better than those of using GPS-alone data. For example, the overall 3D position accuracies of using GPS measurements at DOY 69–75, 2015, and DOY 33–38, 2018, are 0.381 and 0.392 m, while those of using GPS + BDS measurements are 0.348 and 0.363 m, which are only improved by 3.3 and 2.9 cm, respectively. The same conclusion can also be obtained from the orbit accuracy comparisons at DOY 275–300, 2013, as shown in sub-graph (c). The overall position accuracy in the whole 26-day interval for the GPS-alone and GPS + BDS solutions is 0.440 and 0.430 m, respectively, where the accuracy is only marginally better by 1.0 cm. The daily results demonstrate that the inclusion of BDS measurements could only slightly improve the accuracy by 1–3 cm, and if GPS measurements have been already used, the BDS measurements do not play a major role in the GPS/BDS fusion solutions. In addition, it should be noted that the difference between the GPS + BDSN and GPS + BDS solutions is also small. This indicates that there is no obvious orbit accuracy degradation or improvement, no matter whether BDS GEO satellites are involved or not.
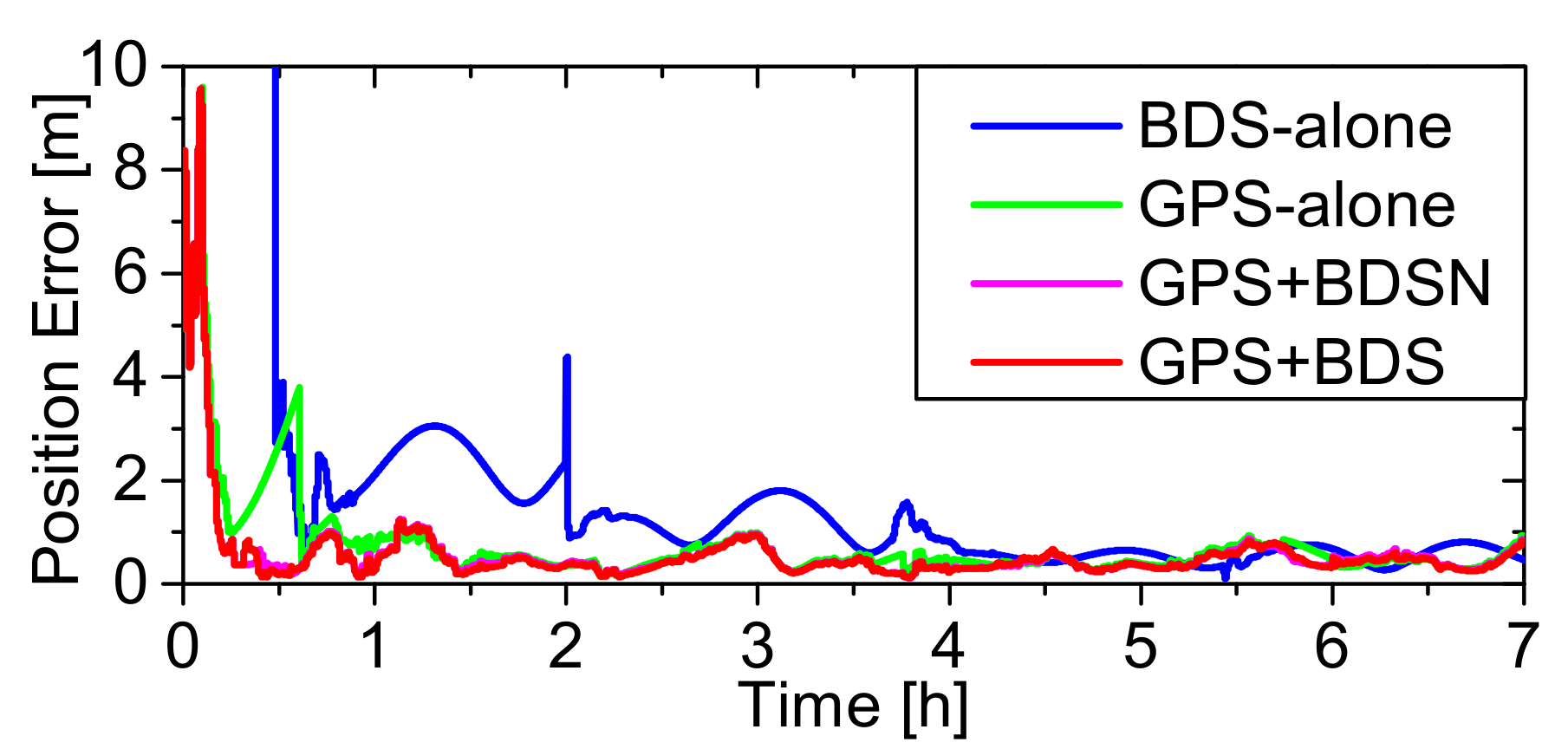
The small increase seems to be of little significance or even meaningless from the view of accuracy, but the fusion of GPS/BDS data is able to speed up the convergence of the Kalman filter.
Figure 8 shows the 3D position error curves of the four GPS/BDS fusion solutions at the convergent stage of the filter. If only using BDS measurements, the filter needs about 4 h for the position error to converge to less than 1.0 m, and it requires about 1 h to converge to 1.0 m when only using GPS measurements, while the convergent time decreases dramatically to 0.5 h for the GPS/BDS fusion solutions. More importantly, the main advantage of the GPS/BDS fusion is not the orbit accuracy improvement or shortened convergence time, but the improved reliability of the onboard RTOD.
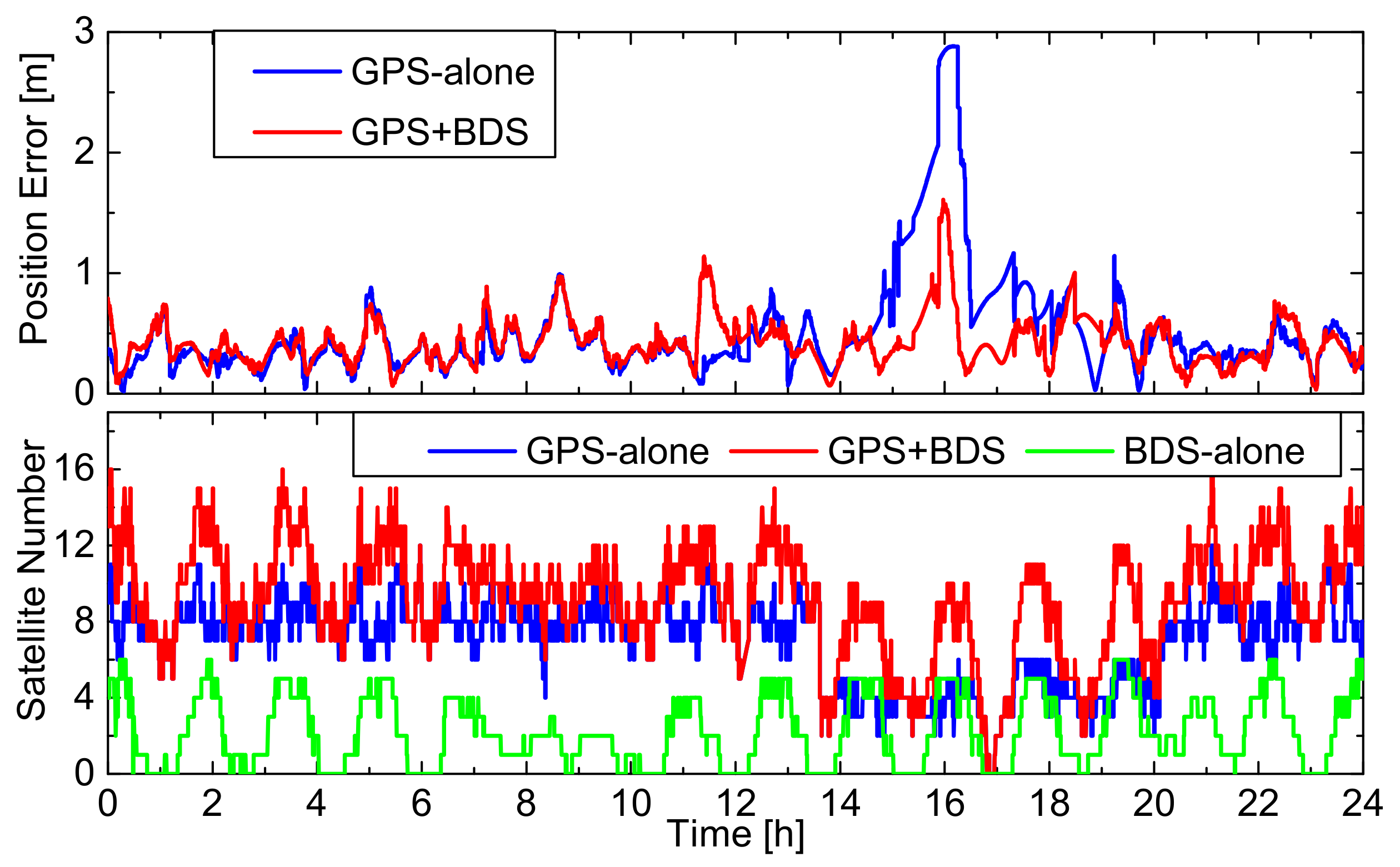
Figure 9 shows the position errors of the GPS-alone and GPS + BDS solutions and the corresponding number of the tracked GPS and BDS satellites at DOY 297, 2013. In an abnormal arc that covers 14–20h, only two–six with an average of 2.8 GPS satellites are tracked. Thus, the position error of the GPS-alone solution is up to 3.0 m. The inclusion of BDS satellites increases the number of tracked GNSS satellites to 2–12 and an average of 5.2. The position error is suppressed to less than 1.5 m dramatically. It is obvious that the GPS + BDS solution guarantees the orbit accuracy in the anomalous arc. Although the anomalous arcs may not occur often, it can be generally concluded that the GPS/BDS fusion improves the reliability and availability of orbit results.
5. Application Prospect Discussion
A numerical search approach is presented in this paper to acquire the optimal setting of the power spectral density for the estimated pseudo-ambiguity parameters of different types of GNSS satellites. With the optimal setting, the real-time orbit accuracies (3D RMS) of 0.3–0.5 m for position and 0.3–0.5 mm/s for velocity are obtained for the FengYun-3C satellite when processing the space-borne GPS/BDS data. In practical applications, the similar numerical search tests could be carried out for a certain LEO satellite equipped with a GNSS receiver first, and then the searched optimal power spectral density of the pseudo-ambiguity can be adopted and uploaded for the onboard RTOD processing of this LEO satellite. Since the space-borne GNSS data condition and orbital characteristics for a specific LEO satellite and the LOS error variation in the broadcast ephemeris of a GNSS generally remain stable within a certain period, the re-prepared optimal value would be effective for a long time. Therefore, the numerical search approach is applicable to obtain the optimal stochastic model for onboard RTOD processing.
The GPS/BDS fusion could increase the number of tracked GNSS satellites effectively. Although the GPS/BDS fusion only improves the real-time orbit accuracy slightly by 1–3 cm, it could speed up the convergence of the onboard RTOD filter significantly. More importantly, it could make more GNSS satellites be observed to suppress the local variation of real-time orbit errors and improve the reliability and availability of the onboard RTOD, especially in some abnormal arcs where only a few GPS satellites are tracked. Due to the comprehensive advantage of multi-GNSS fusion in the availability of GNSS satellites, orbit accuracy, filter convergence and reliability of the onboard RTOD, more and more LEO satellites, even the large-scale LEO constellations, are expected to be equipped with the space-borne multi-GNSS receiver. In addition, although only the poor real-time orbit accuracy with 0.7–2.0 m for position and 0.7–1.7 mm/s for velocity could be achieved for the BDS-alone solution due to the few tracked regional BDS-2 satellites, it is expected to be improved along with the utilization of the BDS-3 global navigation system onboard LEO missions.
6. Summary and Conclusions
We present the onboard RTOD algorithm and experiments using space-borne GPS/BDS measurements of the FengYun-3C satellite. In the RTOD algorithm, a new pseudo-ambiguity parameter, which combines the constant phase ambiguity, the orbit and clock offset error of the GPS/BDS broadcast ephemeris in the line-of-sight (LOS), is defined and estimated in order to reduce the negative effect of the LOS error on onboard RTOD. The stochastic model setting of pseudo-ambiguity decides whether the pseudo-ambiguity can be estimated reasonably and the LOS error could be reduced or not. For different types of GPS/BDS satellites, the LOS errors show different variation properties, and accordingly, the stochastic model of pseudo-ambiguity is set separately and differently. A numerical search approach is presented to obtain the optimal setting of the power spectral density for each type of GNSS satellite by a series of tests. With the optimal setting, the best real-time orbit accuracies (3D RMS) of 0.3–0.5 m for position and 0.3–0.5 mm/s for velocity are achievable when using GPS/BDS carrier-phase and pseudo-range measurements, which are much better than those of the solutions with the inappropriate setting. The error analysis illustrates that these notable accuracy improvements result from the absorption effect of the pseudo-ambiguity, namely that the large part of the LOS error caused by the GNSS broadcast ephemeris is fused into the estimated pseudo-ambiguity.
The different combinations of multi-GNSS have a different influence on the onboard RTOD. If only using BDS measurements, the position and velocity accuracies are at the 0.7–2.0 m and 0.7–1.7 mm/s levels, respectively. The poor performance is caused by the few tracked satellites for BDS which is only a regional system and the obvious orbit and clock errors in the broadcast ephemeris. However, compared with the GPS-alone solution, GPS/BDS fusion only increases the real-time orbit accuracy slightly by 1–3 cm. Despite the marginally improved accuracy, GPS/BDS fusion could speed up the convergence of the Kalman filter, and the time for the position error to converge to 1.0 m is shortened to about 0.5 h for the GPS/BDS fusion compared to 4.0 h for using BDS-alone data and 1.0 h for GPS-alone data. Furthermore, the main advantage of the GPS/BDS fusion is not the orbit accuracy improvement or shortened convergence time, but rather the ability to make more satellites be observed to suppress the local variation of orbit errors and improve the reliability and availability of the onboard RTOD, which is particularly important when only a few GPS satellites are tracked in some abnormal arcs.
In summary, with the optimal stochastic model of the pseudo-ambiguity, the real-time orbit accuracy at 0.3–0.5 m is feasible for the onboard RTOD using space-borne GPS/BDS carrier-phase and pseudo-range measurements and the broadcast ephemeris. The onboard RTOD algorithm and software with refined multi-GNSS data processing have been developed in this paper. With the continuous development of Earth observations, remote sensing, communications and navigation augmentation based on LEO satellites, the onboard RTOD system is expected to fly on more LEO missions to provide a real-time service.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}