
Cooperative Reference Velocity Regulation Control for Virtual Coupling Systems of Heavy-Haul Trains


Abstract
:1. Introduction
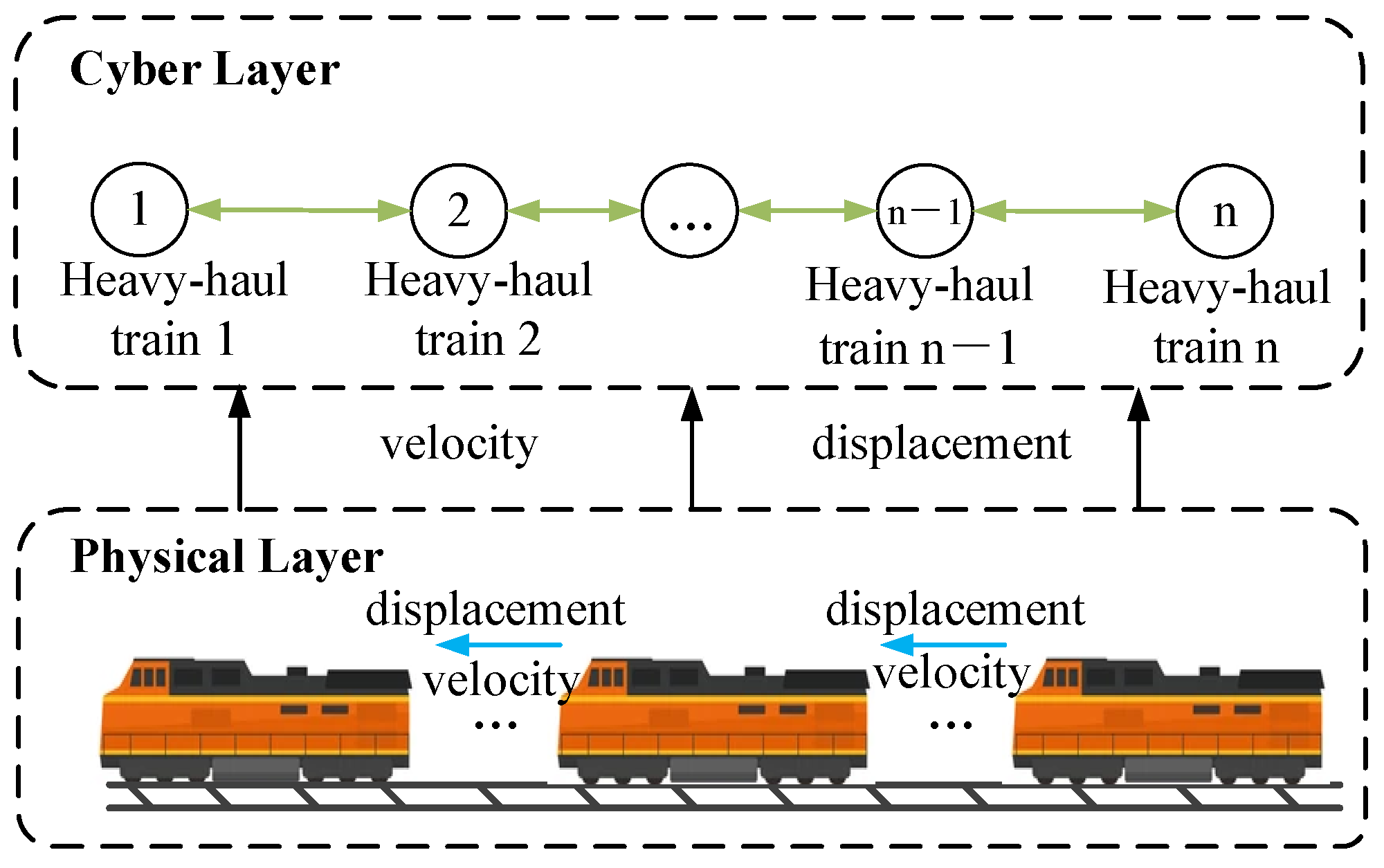
2. Cyber-Physical Modelling
2.1. Physical Modelling
2.2. Cyber Modelling
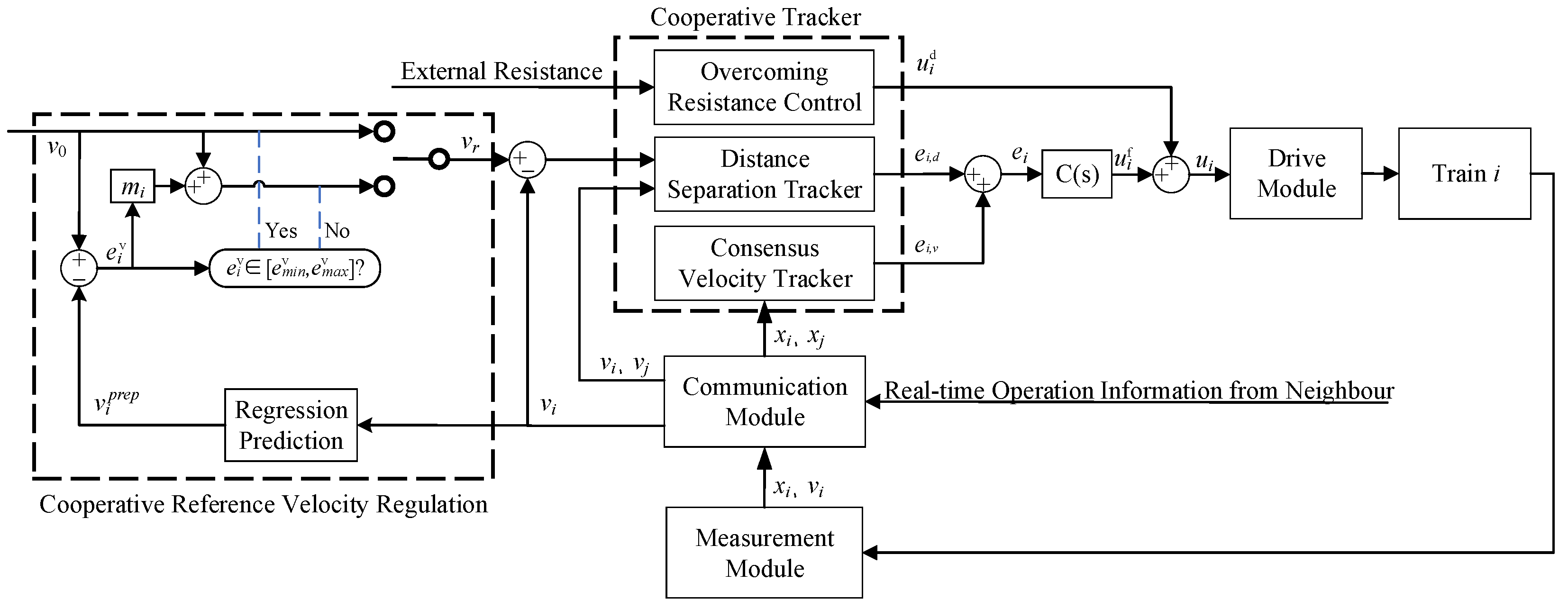
3. Cooperative Predictive Reference Regulation Control
3.1. Scheme of the Proposed Method
3.2. Cooperative Tracker
3.2.1. Consensus-Based Velocity Tracker
3.2.2. Distance Separation Tracker
3.3. Reference Velocity Regulation
3.4. Closed-Loop Control System
4. Simulations
4.1. Parameter Setup
4.1.1. Physical Parameters
4.1.2. Cyber Parameters
4.2. Performance Metrics
4.3. Simulation Condition
4.3.1. Case 1: Acceleration Operation
4.3.2. Case 2: Deceleration Operation
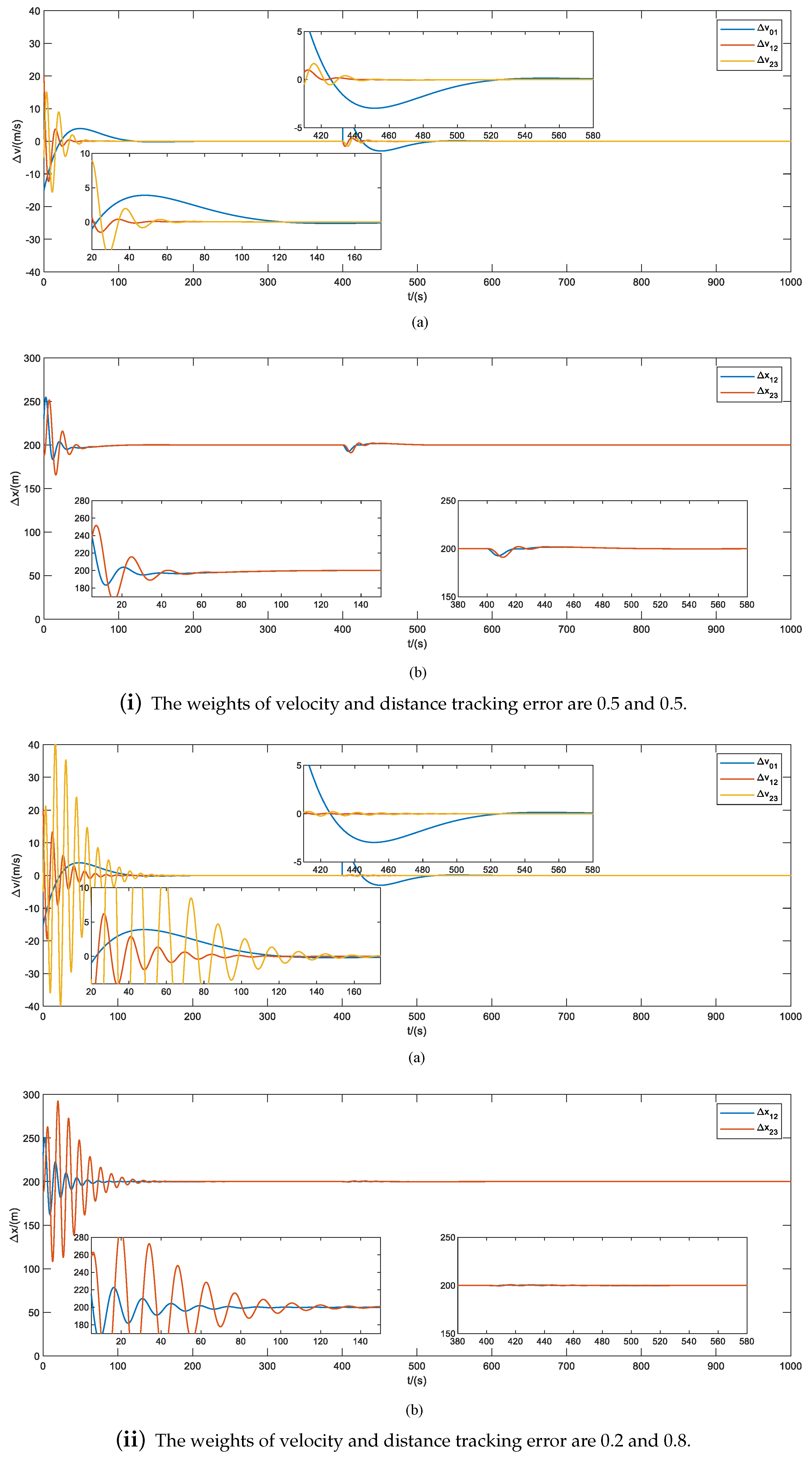
4.4. Simulation under Different Weights
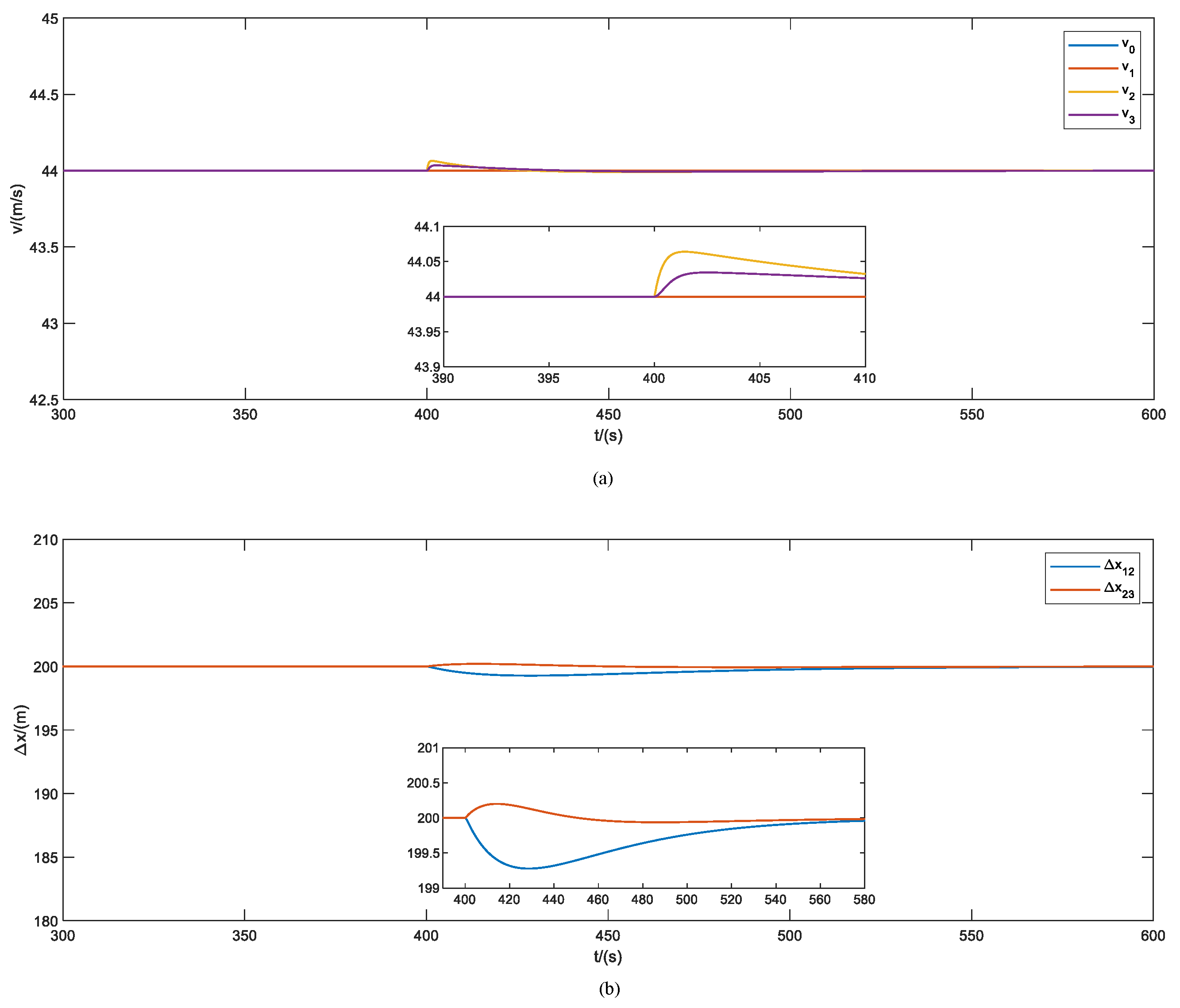
4.5. Simulation with Slope
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Su, S.; She, J.; Wang, D.; Gong, S.; Zhou, Y. A stabilized virtual coupling scheme for a train set with heterogeneous braking dynamics capability. Transp. Res. Part C Emerg. Technol. 2023, 146, 103947. [Google Scholar] [CrossRef]
- Shuai, S.; Wentao, L.; Qingyang, Z.; Ruoing, L.; Tao, T.; Jidong, L. A cooperative collision-avoidance control methodology for virtual coupling trains. Accid. Anal. Prev. 2022, 173, 106703. [Google Scholar]
- Wang, X.; Su, S.; Cao, Y.; Qin, L.; Liu, W. Robust Cruise Control for the Heavy Haul Train Subject to Disturbance and Actuator Saturation. IEEE Trans. Intell. Transp. Syst. 2023, 24, 8003–8013. [Google Scholar] [CrossRef]
- Dong, H.; Gao, S.; Ning, B. Cooperative control synthesis and stability analysis of multiple trains under moving signaling systems. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2730–2738. [Google Scholar] [CrossRef]
- Huang, S.; Zhang, F.; Guo, Q.; Dong, D. Synchronous control system based on wireless data transmission for 50,000-t heavy-haul trains. Adv. Mech. Eng. 2018, 10, 1687814018784827. [Google Scholar] [CrossRef]
- Wang, X.; Li, S.; Tang, T. Robust optimal predictive control of heavy haul train under imperfect communication. ISA Trans. 2019, 91, 52–65. [Google Scholar] [CrossRef]
- Zhao, Y.; Xie, L. Performance analysis of a train-to-train communication system using directional antennas. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4897–4907. [Google Scholar]
- Moradi-Pari, E.; Tian, D.; Bahramgiri, M.; Rajab, S.; Bai, S. DSRC Versus LTE-V2X: Empirical Perfor-mance Analysis of Direct Vehicular Communication Technologies. IEEE Trans. Intell. Transp. Syst. 2023, 24, 4889–4903. [Google Scholar] [CrossRef]
- Wu, Q.; Ge, X.; Han, Q.-L.; Liu, Y. Railway virtual coupling: A survey of emerging control techniques. IEEE Trans. Intell. Veh. 2023, 8, 3239–3255. [Google Scholar] [CrossRef]
- Felez, J.; Vaquero-Serrano, M.A. Virtual Coupling in Railways: A Comprehensive Review. Machines 2023, 11, 521. [Google Scholar] [CrossRef]
- Wu, Q.; Ge, X.; Han, Q.L.; Wang, B.; Wu, H.; Cole, C.; Spiryagin, M. Dynamics and control simulation of railway virtual coupling. Veh. Syst. Dyn. 2022, 61, 2292–2316. [Google Scholar] [CrossRef]
- Felez, J.; Kim, Y.; Borrelli, F. A model predictive control approach for virtual coupling in railways. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2728–2739. [Google Scholar] [CrossRef]
- Park, J.; Lee, B.H.; Eun, Y. Virtual coupling of railway vehicles: Gap reference for merge and separation, robust control, and position measurement. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1085–1096. [Google Scholar] [CrossRef]
- Hongwei, W.; Qianqian, Z.; Siyu, L.; Dongliang, C.; Chengcheng, L.; Li, Z.; Xi, W.; Tao, T. A reinforcement learning empowered cooperative control approach for IIoT-based virtually coupled train sets. IEEE Trans. Ind. Inform. 2020, 17, 4935–4945. [Google Scholar]
- Wu, J.; Peng, J.; He, H.; Luo, J. Comparative Analysis on the Rule-based Control Strategy of Two Typical Hybrid Electric Vehicle Power train. Energy Procedia 2016, 104, 384–389. [Google Scholar] [CrossRef]
- Bauso, D.; Fecarotti, C.; Khaleghi, A. Cooperative control and stability analysis for virtual coupling of rail vehicles. Control Eng. Pract. 2023, 133, 105452. [Google Scholar] [CrossRef]
- Chen, B.; Zhang, R.; Zhou, F.; Du, W. An Observer-Driven Distributed Consensus Braking Control Method for Urban Railway Trains with Unknown Disturbances. Actuators 2023, 12, 111. [Google Scholar] [CrossRef]
- Li, J.; Feng, T.; Zhang, J.; Yan, F. Optimal distributed cooperative control for multi-agent systems with constrains on convergence velocity and control input. Neurocomputing 2021, 426, 14–25. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, T.; Karimi, H.R. Distributed cruise control of high-speed trains. J. Frankl. Inst. 2017, 354, 6044–6061. [Google Scholar] [CrossRef]
- Li, S.; Yang, L.; Gao, Z. Coordinated cruise control for high-speed train movements based on a multi-agent model. Transp. Res. Part C Emerg. Technol. 2015, 56, 281–292. [Google Scholar] [CrossRef]
- Su, S.; Huang, Y.; Liu, W.; Tang, T.; Cao, Y.; Liu, H. Optimization of the velocity curve for heavy-haul trains considering cyclic air braking: An MILP approach. Eng. Optim. 2022, 55, 876–890. [Google Scholar] [CrossRef]
- Zhou, F.; Huang, Z.; Gao, K.; Li, L.; Liao, H.; Peng, J. Distributed cooperative tracking control for heavy haul trains with event-triggered strategy. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 770–775. [Google Scholar]
- He, J.; Yang, X.; Zhang, C.; Xiao, M. Sliding mode consistency tracking control of multiple heavy haul trains under input saturation and safety distance constraints. J. Frankl. Inst. 2023, 360, 9028–9049. [Google Scholar] [CrossRef]
- Gao, K.; Liu, W.-R.; Wang, D.-Y.; Huang, Z.-W. Design of distributed cooperative observer for heavy-haul train with unknown displacement. IET Intell. Transp. Syst. 2017, 11, 239–247. [Google Scholar]
- Liu, Y.; Zhou, Y.; Su, S.; Xun, J.; Tang, T. An analytical optimal control approach for virtually coupled high-speed trains with local and string stability. Transp. Res. Part C Emerg. Technol. 2021, 125, 102886. [Google Scholar] [CrossRef]
- Liu, W.; Su, S.; Tang, T.; Wang, X. A DQN-based intelligent control method for heavy haul trains on long steep downhill section. Transp. Res. Part C Emerg. Technol. 2021, 129, 103249. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, Y.; Liu, P.; Zhang, G. Improved PID control for safe and efficient train operations in a railway system. IEEE Trans. Intell. Transp. Syst. 2020, 21, 772–782. [Google Scholar]
- Su, S.; She, J.; Li, K.; Wang, X.; Zhou, Y. A nonlinear safety equilibrium spacing-based model predictive control for virtually coupled train set over gradient terrains. IEEE Trans. Transp. Electrif. 2021, 8, 2810–2824. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, Y.; Su, S.; Xun, J.; Tang, T. Control strategy for stable formation of high-speed virtually coupled trains with disturbances and delays. Comput. Civ. Infrastruct. Eng. 2023, 38, 621–639. [Google Scholar] [CrossRef]
- Hafner, D.; Lillicrap, T.; Fischer, I.; Villegas, R.; Ha, D.; Lee, H.; Davidson, J. Learning Latent Dynamics for Planning from Pixels. In Proceedings of the International Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; pp. 2555–2565. [Google Scholar]
- Li, J.; Wang, J.; Peng, H.; Hu, Y.; Su, H. Fuzzy-torque approximation-enhanced sliding mode control for lateral stability of mobile robot. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 2491–2500. [Google Scholar] [CrossRef]
- Ghaffarzadeh, H.; Stone, C.; Mmhrizi-sani, A. Predictive set point modulation to mitigate transients in lightly damped balanced and unbalanced systems. IEEE Trans. Power Syst. 2016, 32, 1041–1049. [Google Scholar] [CrossRef]
- Ghaffarzadeh, H.; Mmhrizi-sani, A. Predictive set point modulation technique to enhance the dynamic response of a power system. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 1134–1140. [Google Scholar]
- Zhou, Y.; Huang, Z.; Liao, H.; Li, H.; Jiao, Y.; Peng, J. A predictive set-point modulation energy management strategy for hybrid energy storage systems. IEEE Trans. Ind. Appl. 2019, 55, 6266–6277. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | RMSEv | RMSE | MVF | MRDF | |
|---|---|---|---|---|---|
| Method | |||||
| Cooperative | 2.25 | 116.54 | 2.97 | 19.32 | |
| Proposed | 2.06 | 40.73 | 1.93 | 10.22 | |
| Metric | RMSEv | RMSE | MVF | MRDF | |
|---|---|---|---|---|---|
| Method | |||||
| Cooperative | 2.54 | 90.11 | 3.40 | 22.08 | |
| Proposed | 1.20 | 27.50 | 2.20 | 11.76 | |
| Metric | RMSEv | RMSE | MVF | MRDF | |
|---|---|---|---|---|---|
| Method | |||||
| 0.9 and 0.1 | 2.06 | 40.73 | 1.93 | 10.22 | |
| 0.5 and 0.5 | 2.3 | 20.47 | 3.22 | 5.24 | |
| 0.2 and 0.8 | 2.28 | 2.6 | 3.16 | 1.03 | |
| Metric | RMSEv | RMSE | MVF | MRDF | |
|---|---|---|---|---|---|
| Method | |||||
| Cooperative | 0.09 | 1.21 | 0.07 | 0.72 | |
| Proposed | 0.05 | 0.72 | 0.03 | 0.41 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, X.; Li, W.; Li, S.; Yang, Y.; Peng, J. Cooperative Reference Velocity Regulation Control for Virtual Coupling Systems of Heavy-Haul Trains. Sustainability 2023, 15, 13425. https://doi.org/10.3390/su151813425
Yu X, Li W, Li S, Yang Y, Peng J. Cooperative Reference Velocity Regulation Control for Virtual Coupling Systems of Heavy-Haul Trains. Sustainability. 2023; 15(18):13425. https://doi.org/10.3390/su151813425
Chicago/Turabian StyleYu, Xiaoquan, Wei Li, Shuo Li, Yingze Yang, and Jun Peng. 2023. "Cooperative Reference Velocity Regulation Control for Virtual Coupling Systems of Heavy-Haul Trains" Sustainability 15, no. 18: 13425. https://doi.org/10.3390/su151813425
APA StyleYu, X., Li, W., Li, S., Yang, Y., & Peng, J. (2023). Cooperative Reference Velocity Regulation Control for Virtual Coupling Systems of Heavy-Haul Trains. Sustainability, 15(18), 13425. https://doi.org/10.3390/su151813425