
A Study on Appearance Acceptance Appraisal of Elderly Mobility Assists


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Research Background
1.2. Research Scope and Objectives
2. Literature Discussion
2.1. Aging Society
2.2. Mobility Assists Demand
2.3. Wearable Robotic Exoskeleton Status
2.4. Aging Phenomenon of Physical and Mental Function of the Elderly
- Biological aging refers to the changes in body function attributed to time.
- Psychological aging refers to the individual’s perception of the aging process.
- The aging of society refers to the attitude of society towards aging and the role it plays.
2.5. Psychological Changes of the Elderly
2.6. Summarize
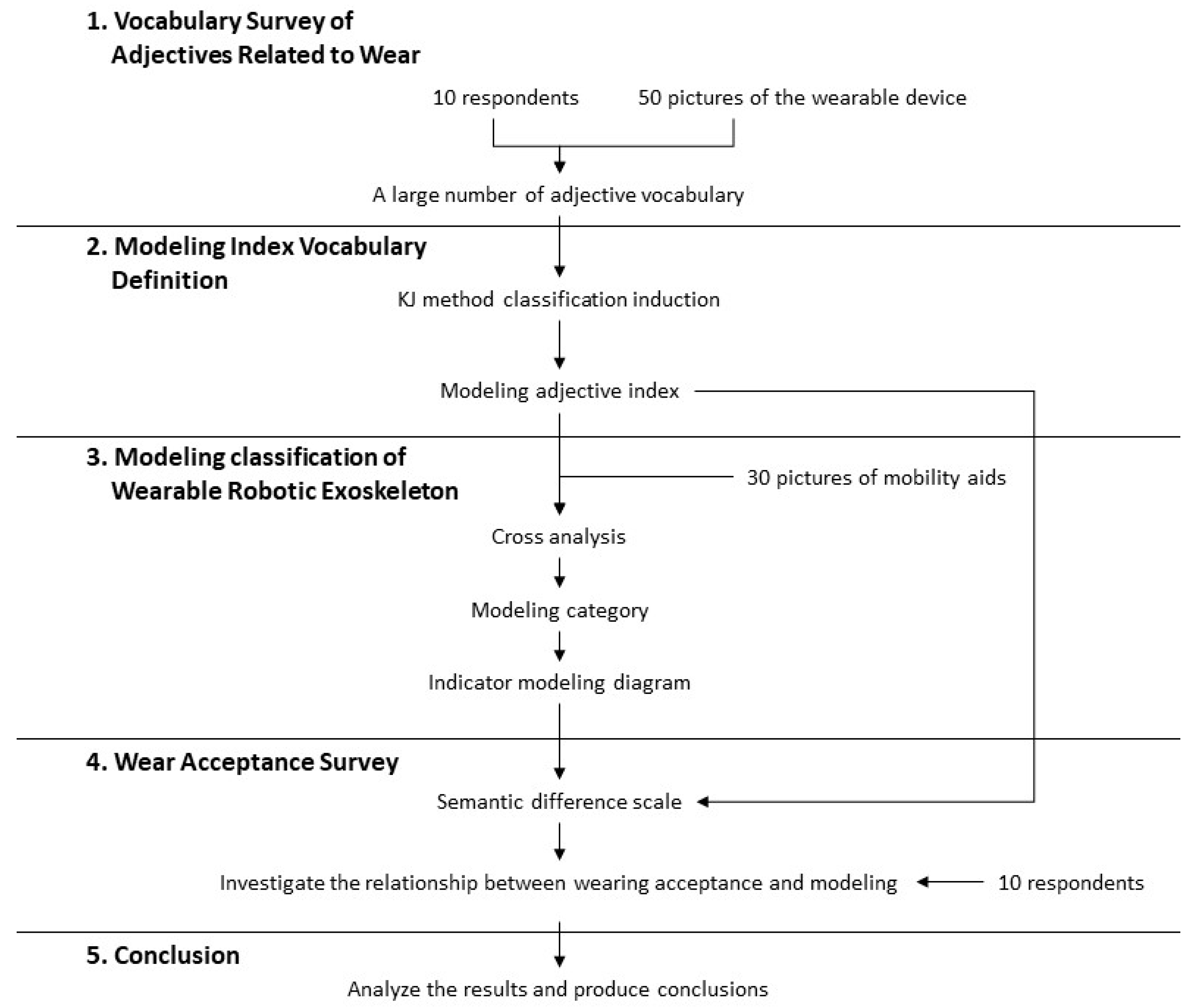
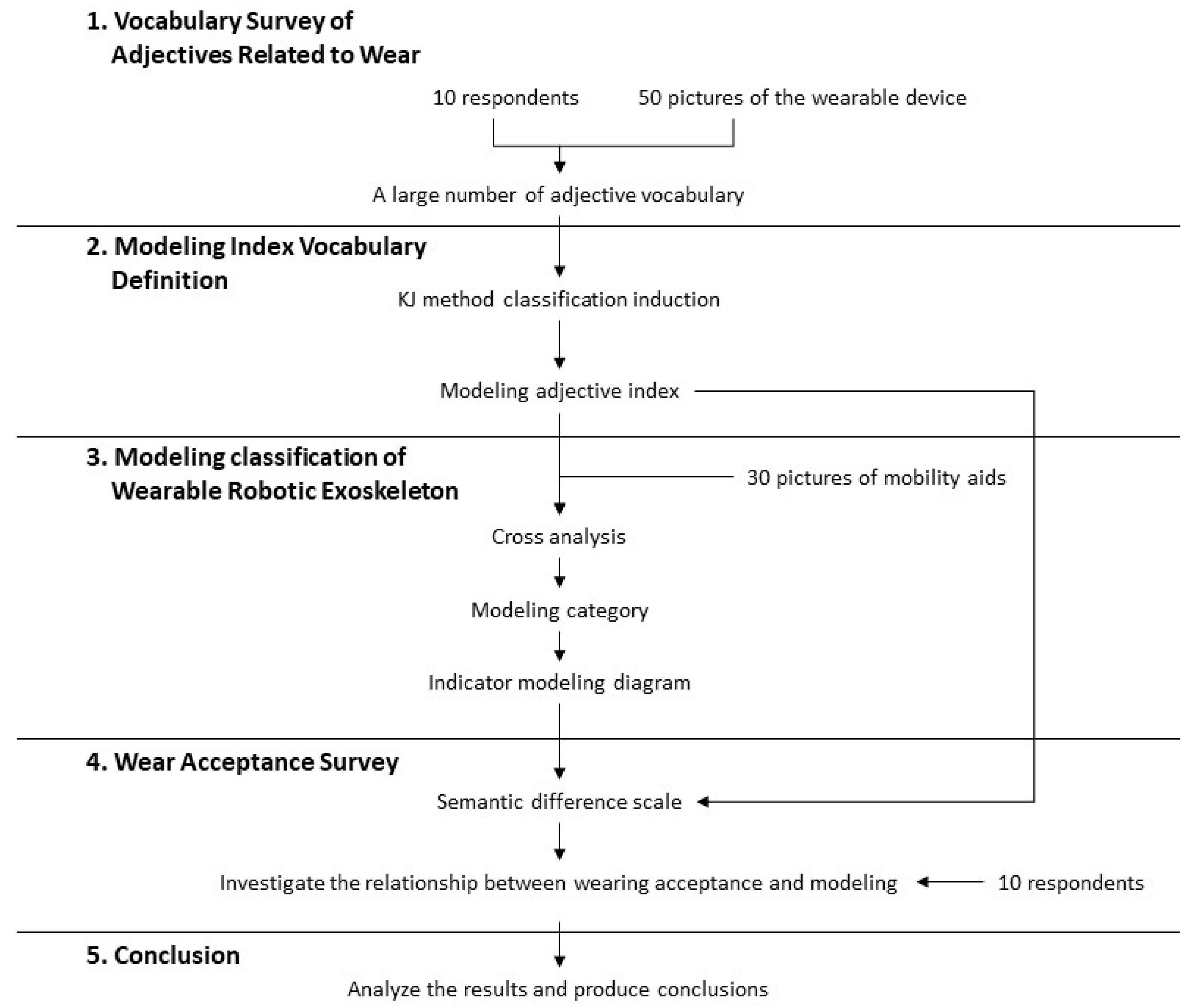
3. Research Methods
- Collect adjective vocabulary: Investigate the types of adjective vocabulary used by users for “wearable devices”;
- Definition of modeling index vocabulary: Apply KJ method to classify and summarize the collected adjective vocabulary and establish “modeling adjective index”;
- Modeling classification of exoskeleton assistive devices: Apply the cross-analysis method to analyze the “Wearable Robotic Exoskeleton” and the “modeling adjective index” to obtain the “modeling category” of the exoskeleton assistive device;
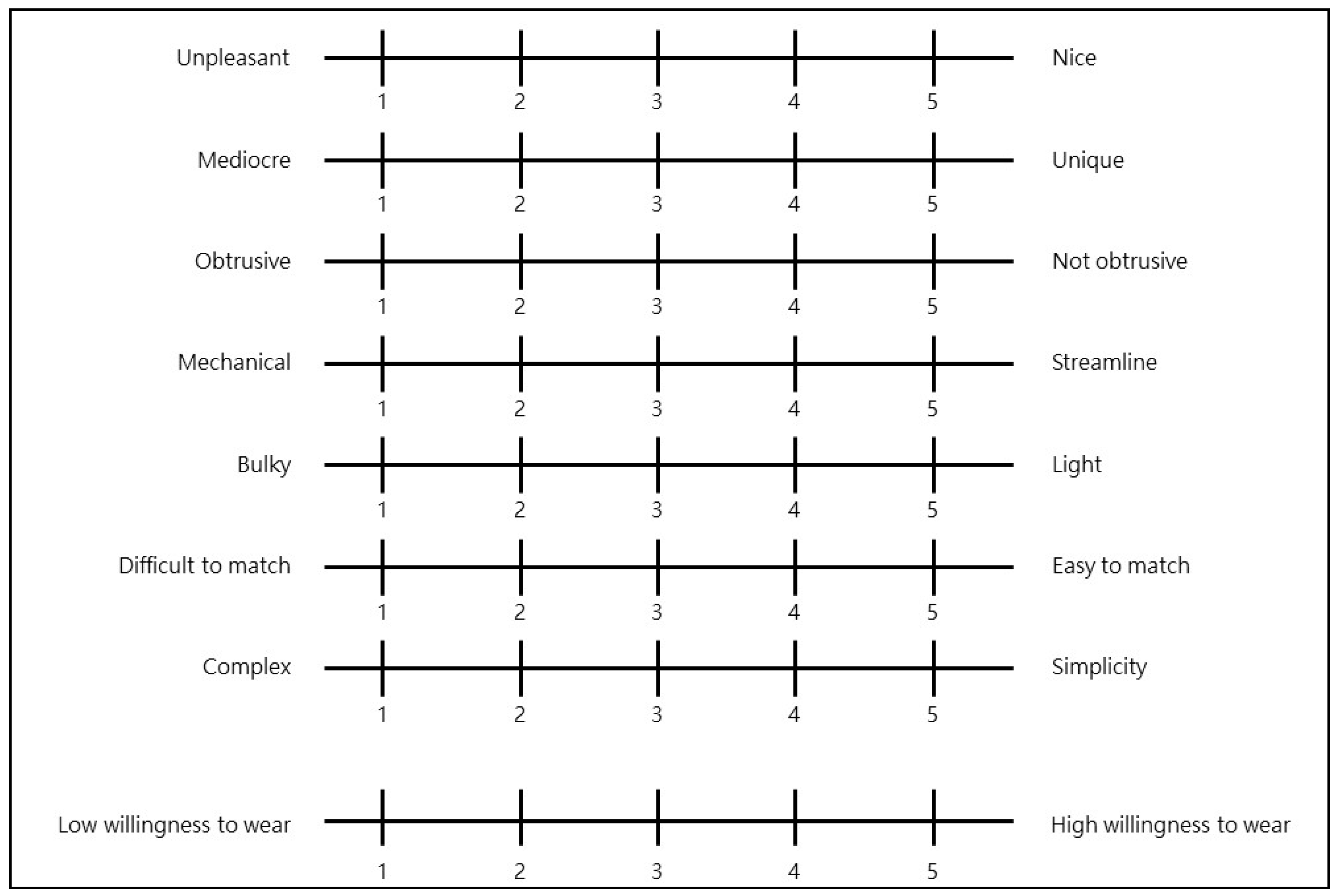
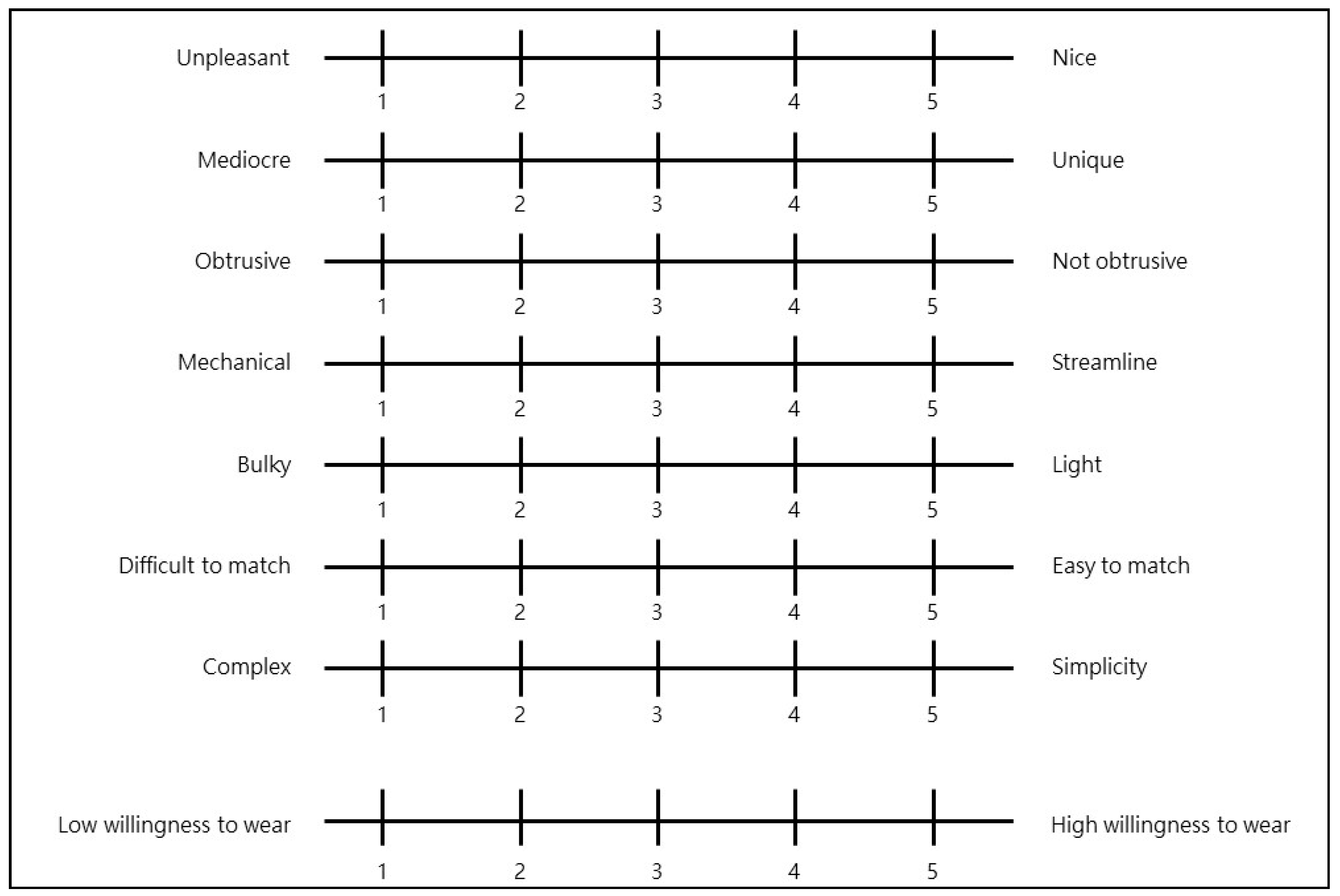
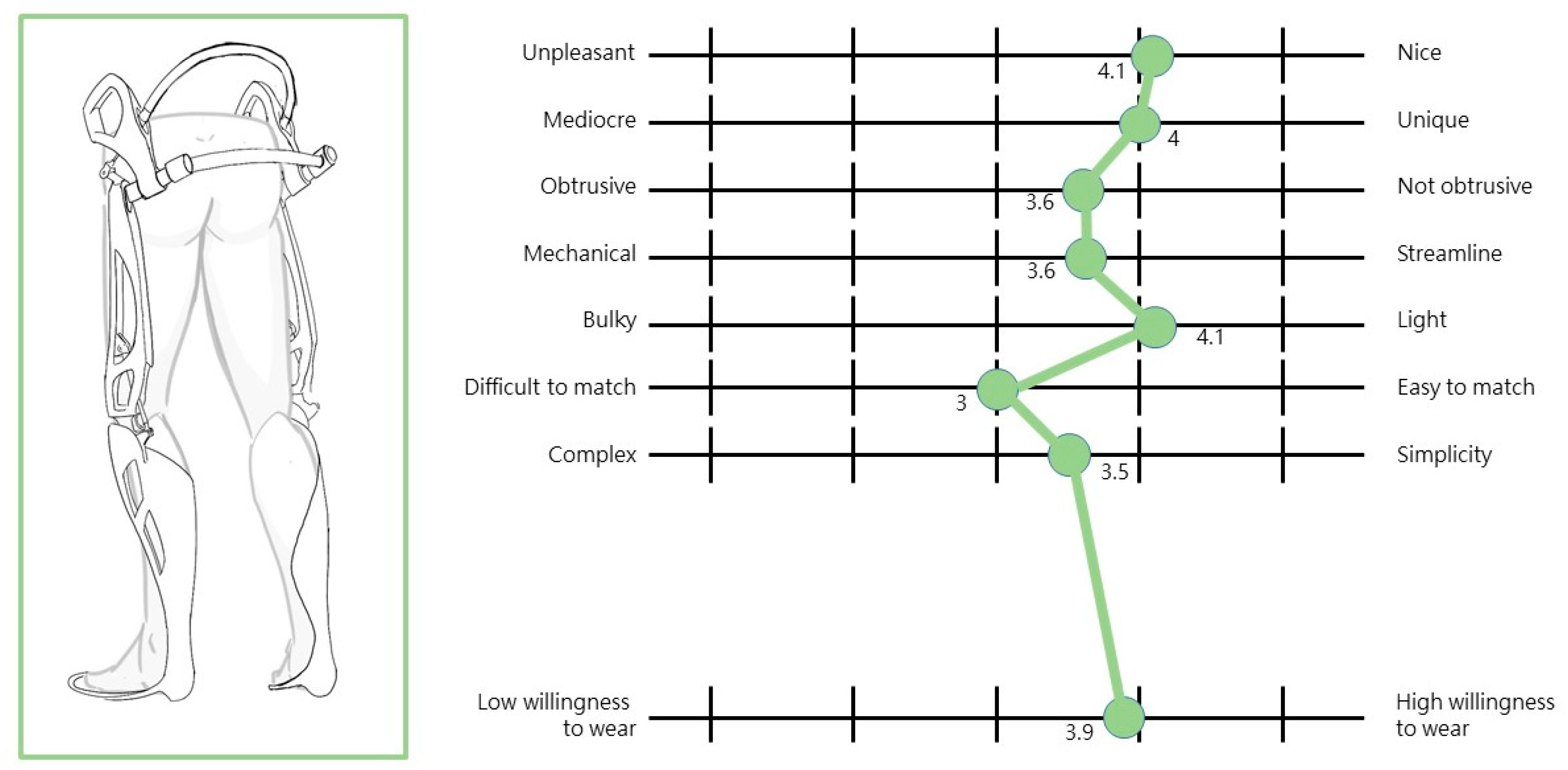
- Wearability survey: Use the “modeling adjective index” to make a “syntactic difference scale” to investigate the feelings of the “modeling category” of various types of exoskeleton assistive devices and the “wearing acceptance”;
- Conclusion: Discuss the results of statistical analysis.
4. Implementation and Survey Statistics
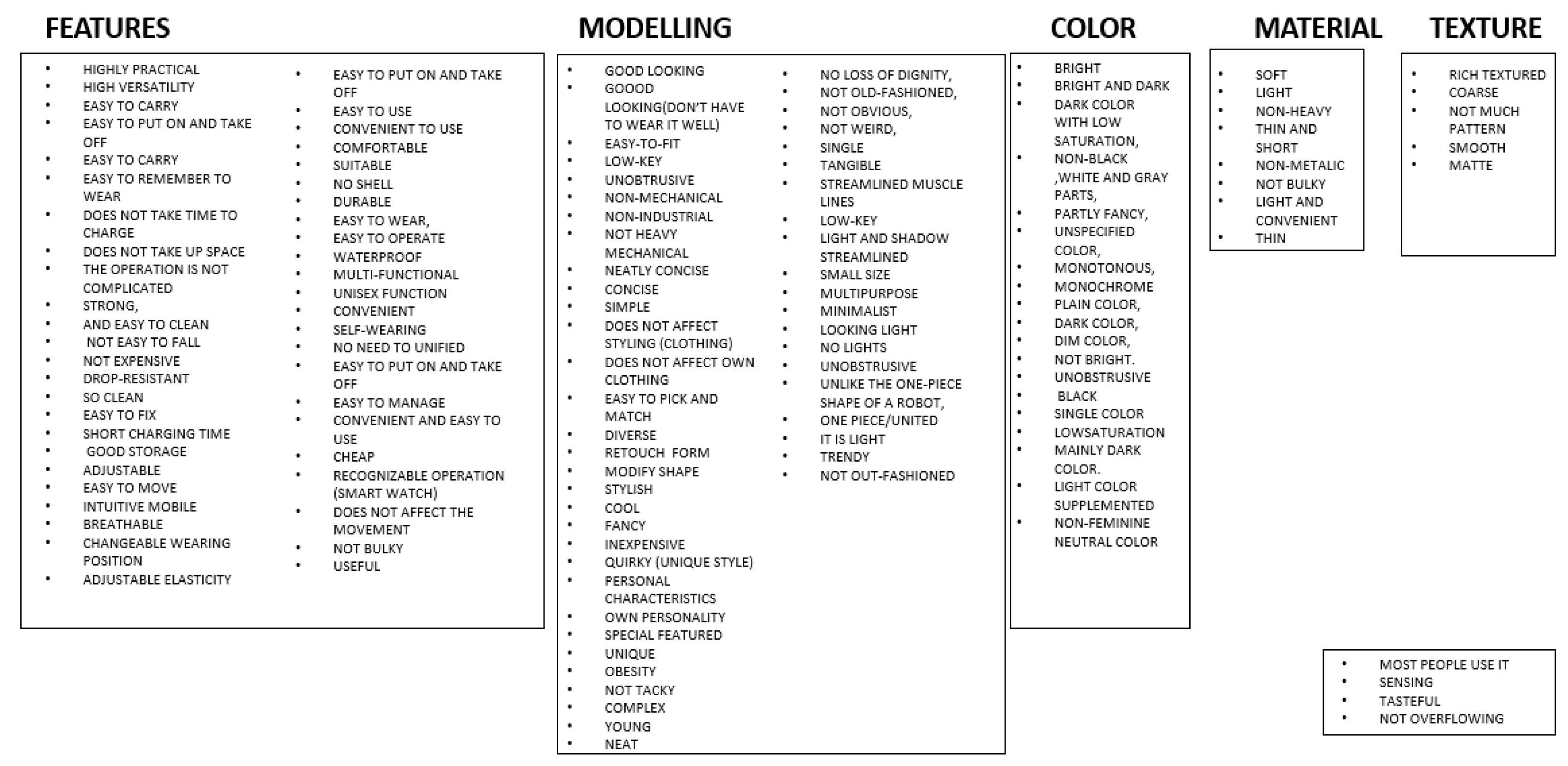
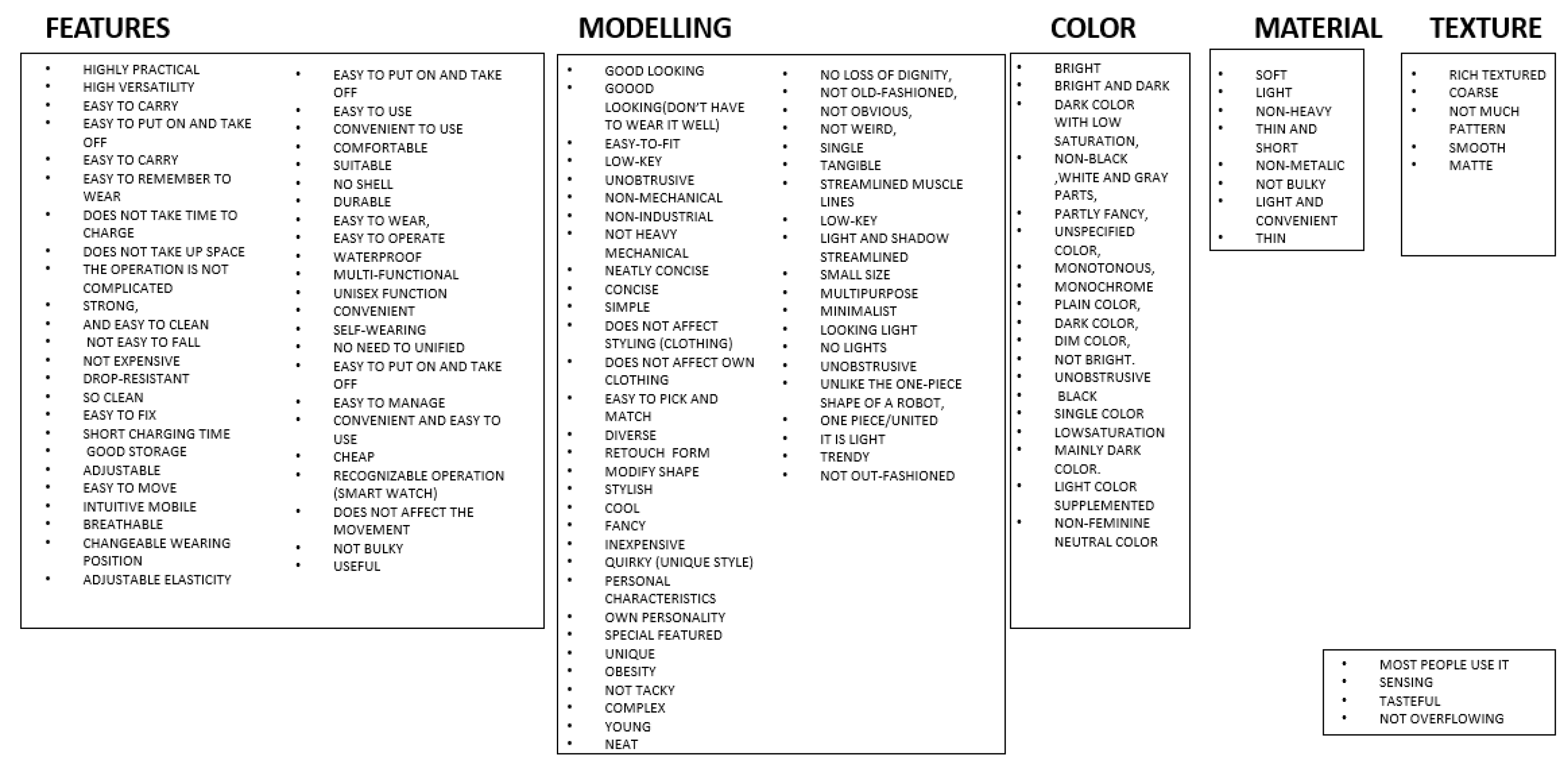
4.1. Vocabulary Survey of Adjectives Related to Wear
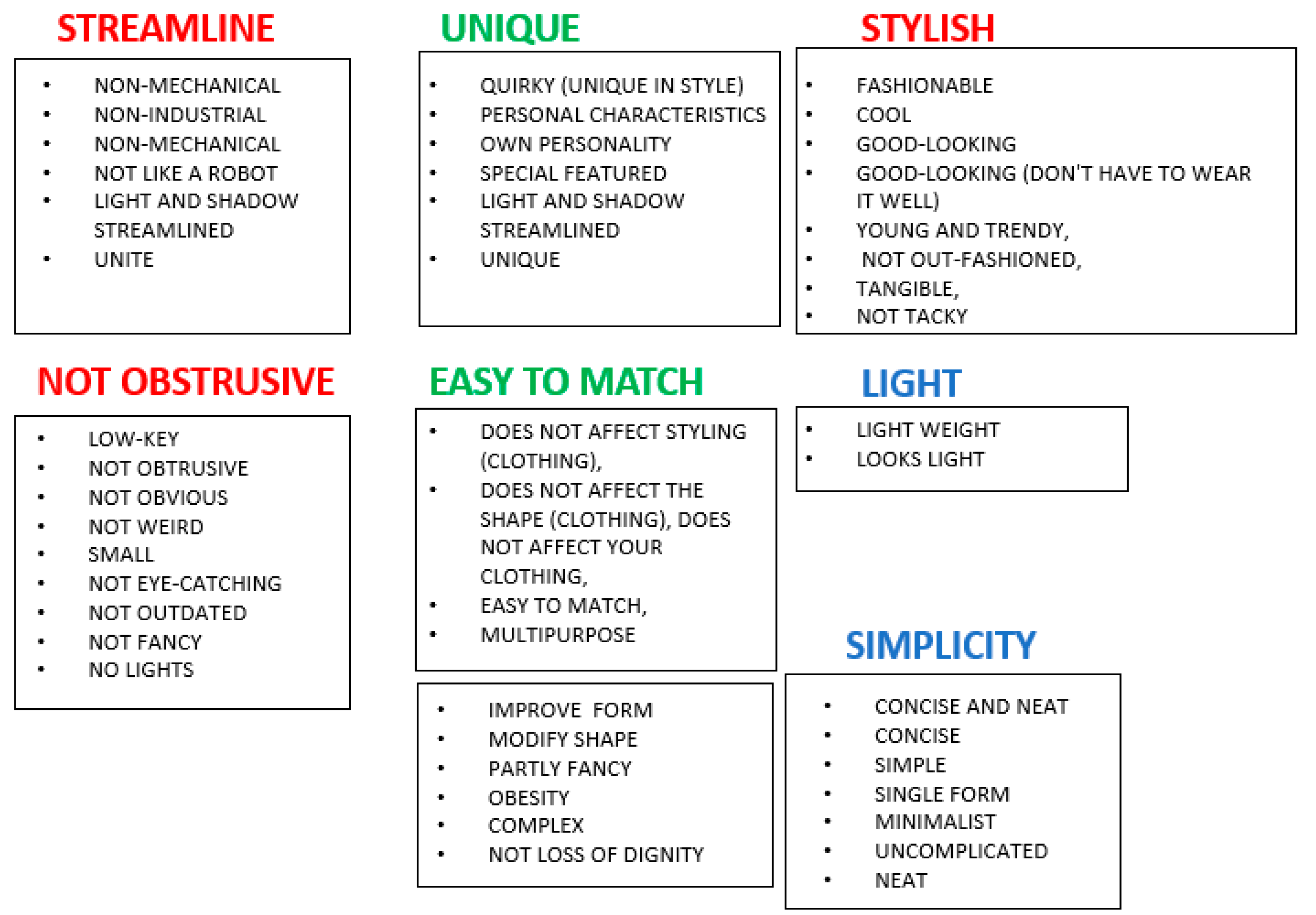
4.2. Modeling Index Vocabulary Definition
- “Stylish” is transformed into “Nice and Unpleasant”;
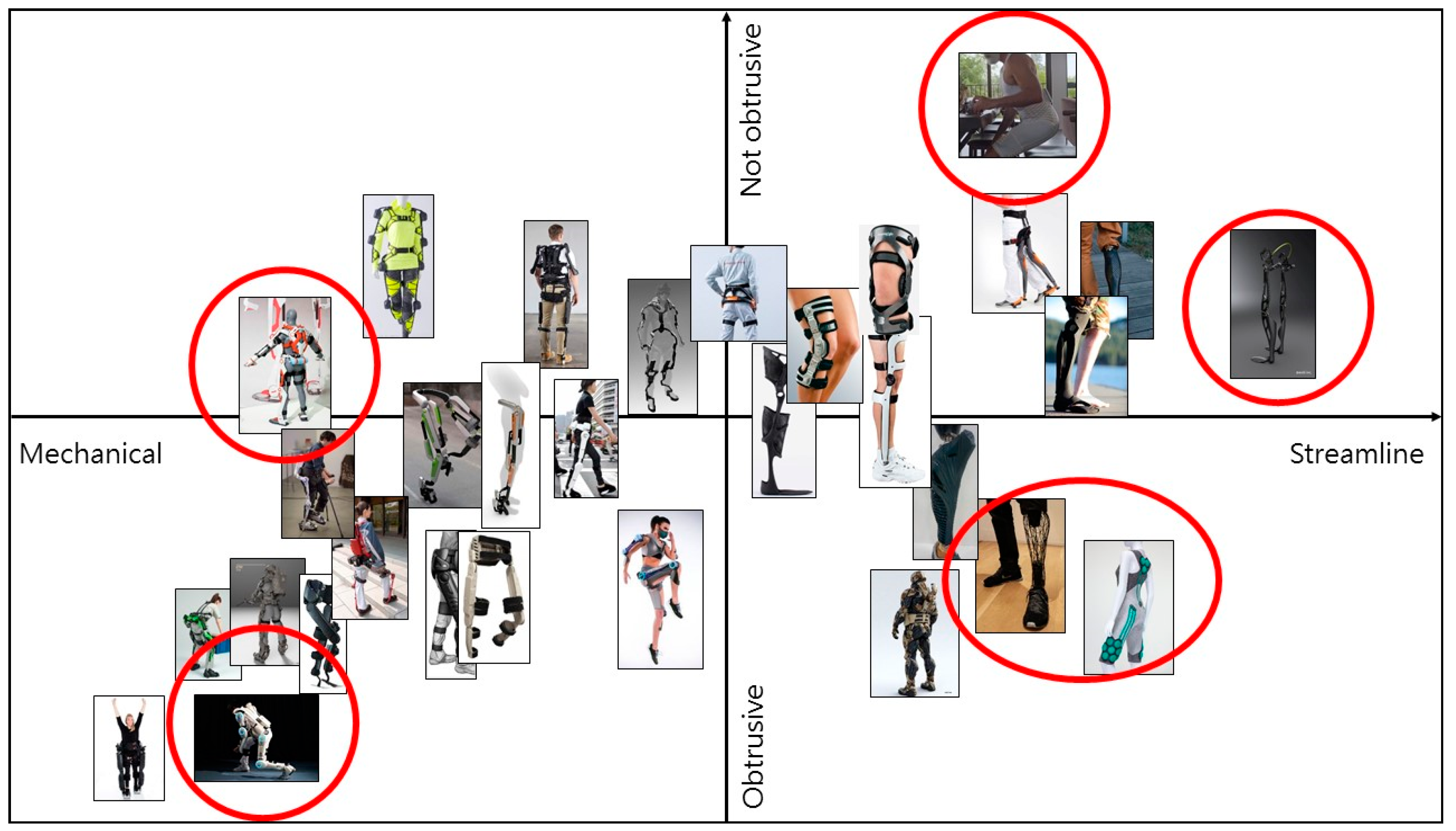
- “Streamline” is transformed into “Streamline and Mechanical”;
- “Not Obtrusive” transformation into “Obtrusive and Not obtrusive”;
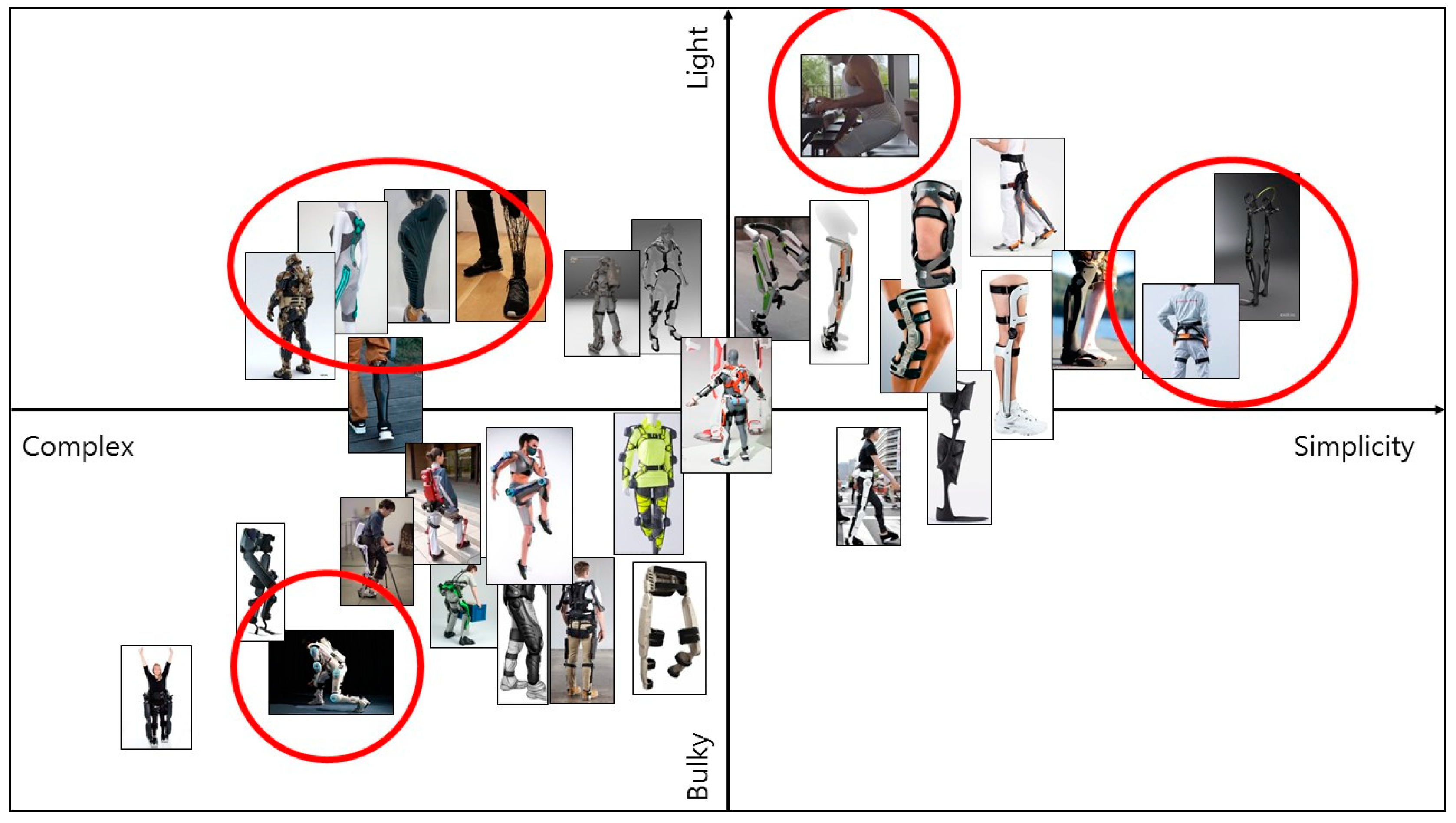
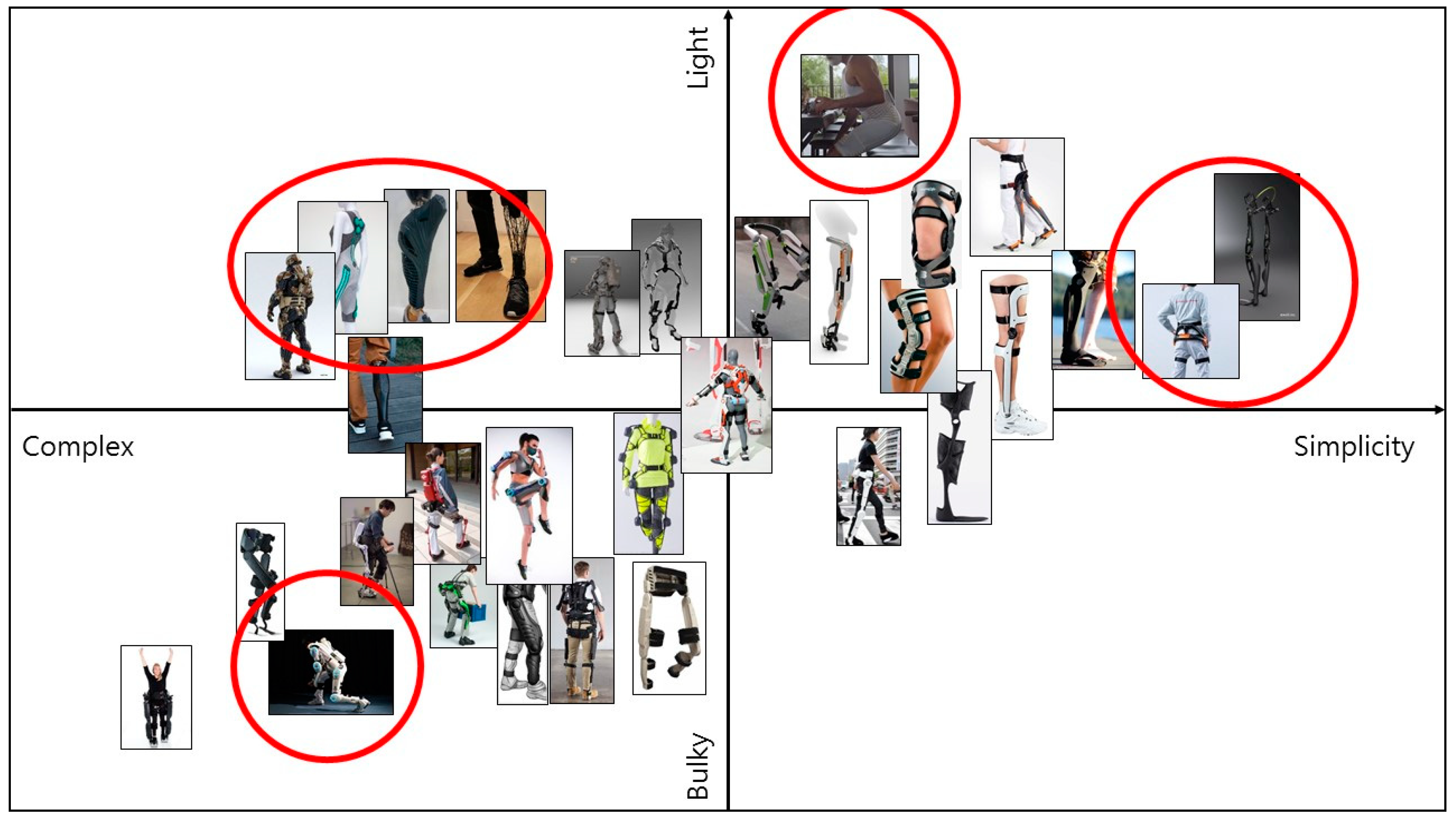
- “Simplicity” is transformed into “Simplicity and Complex”;
- “Light” is transformed into “Light and Bulky”;
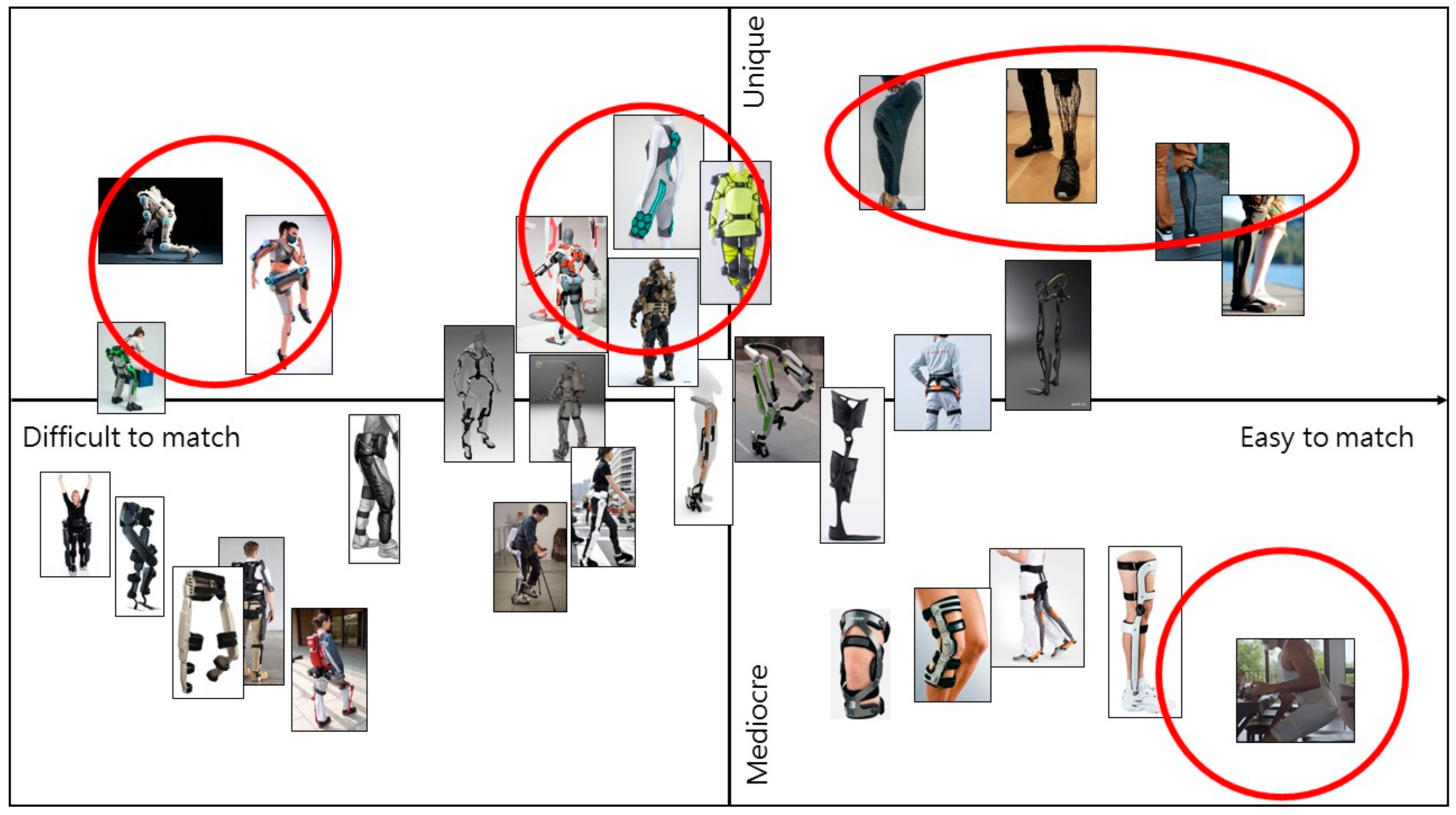
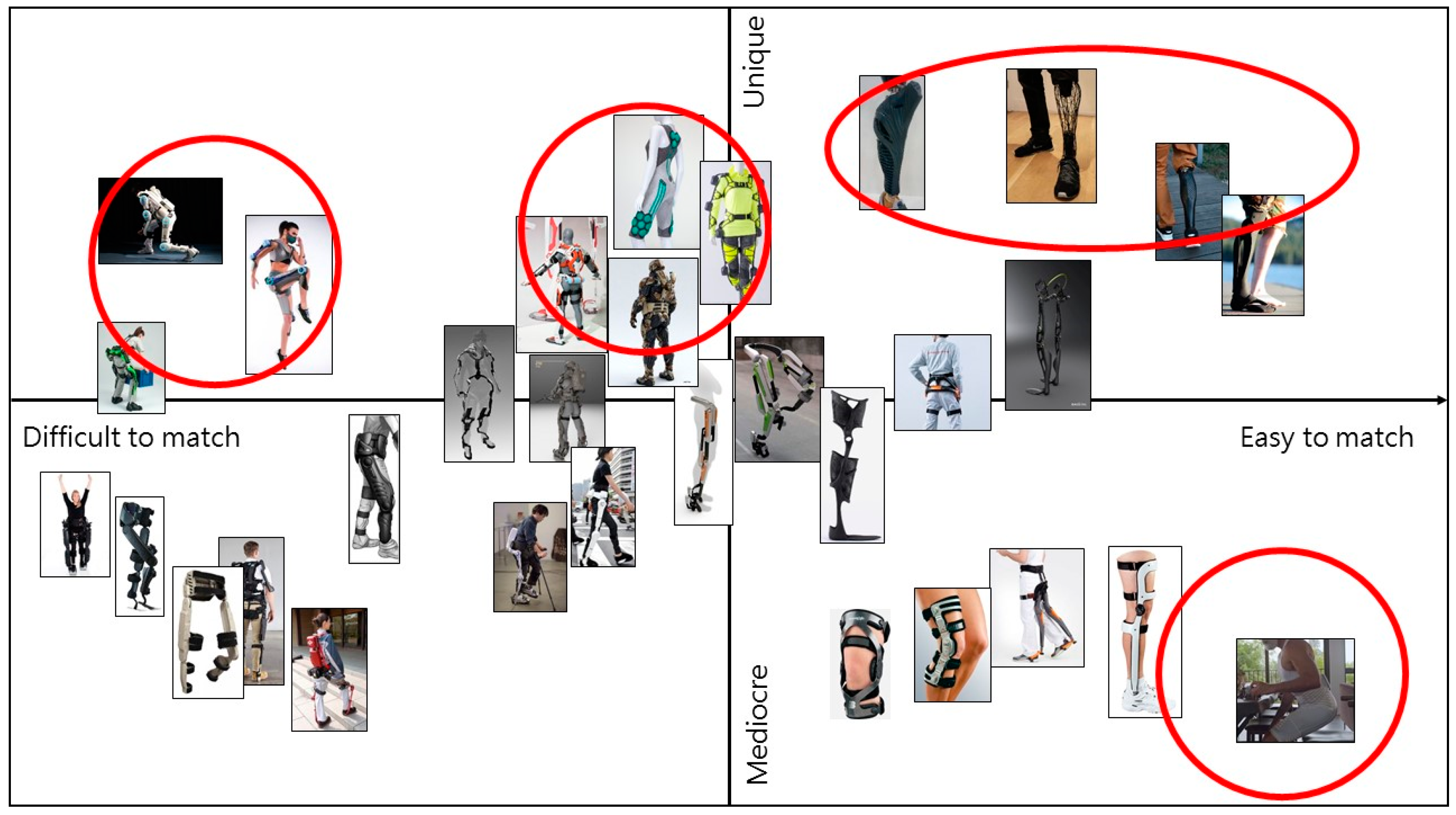
- “Easy to match” is converted to “Easy to match and Difficult to match”;
- “Unique” is transformed into “Unique and Mediocre”.
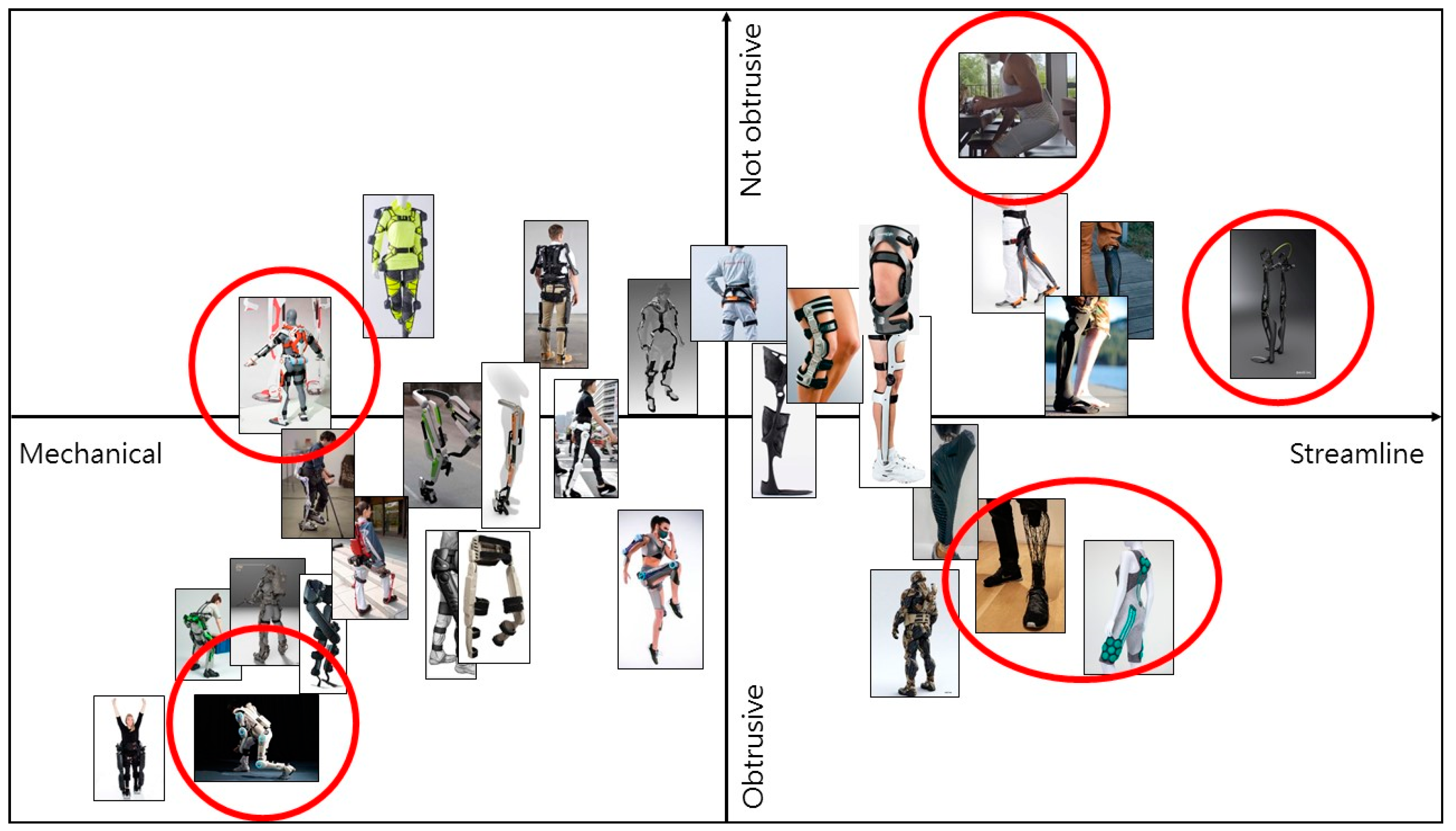
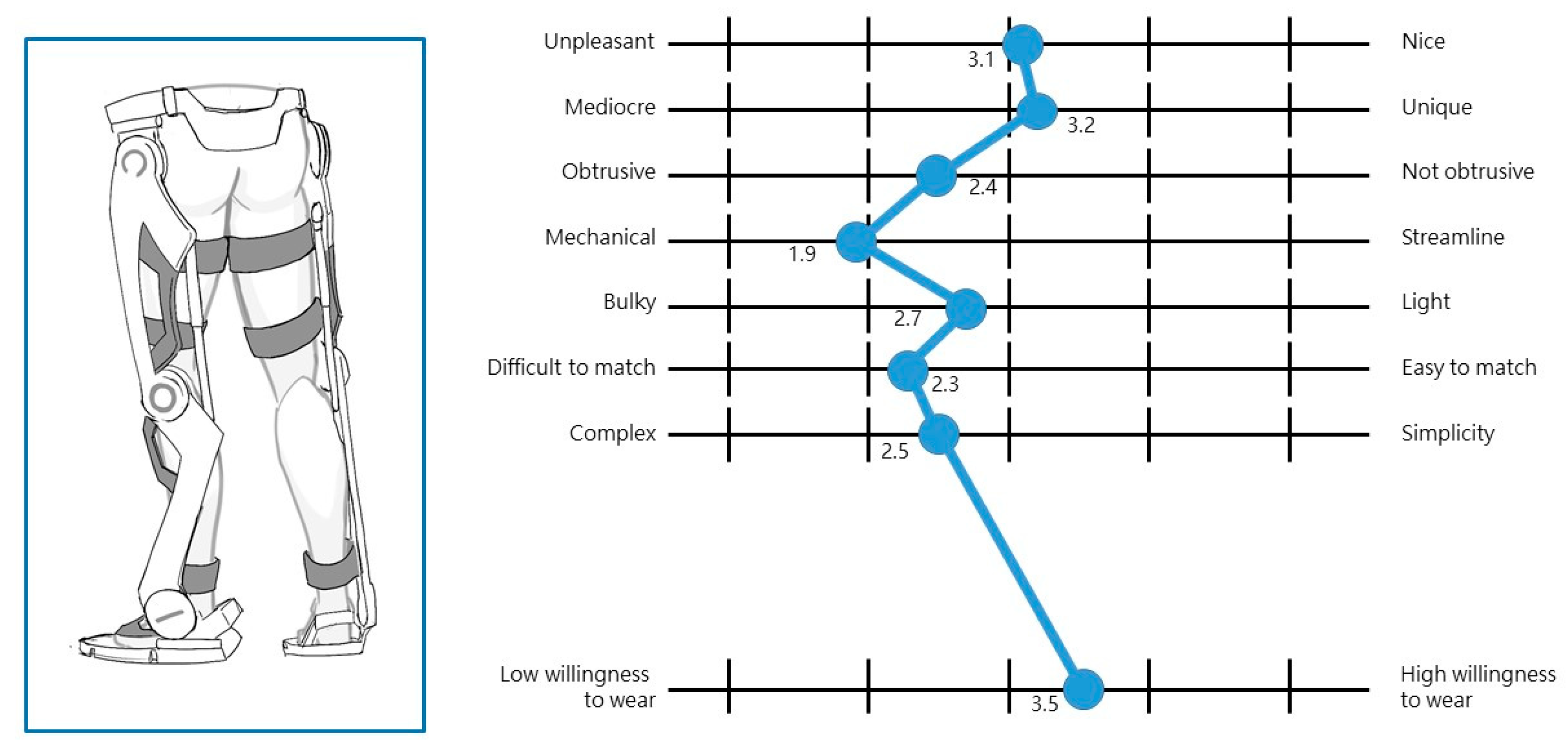
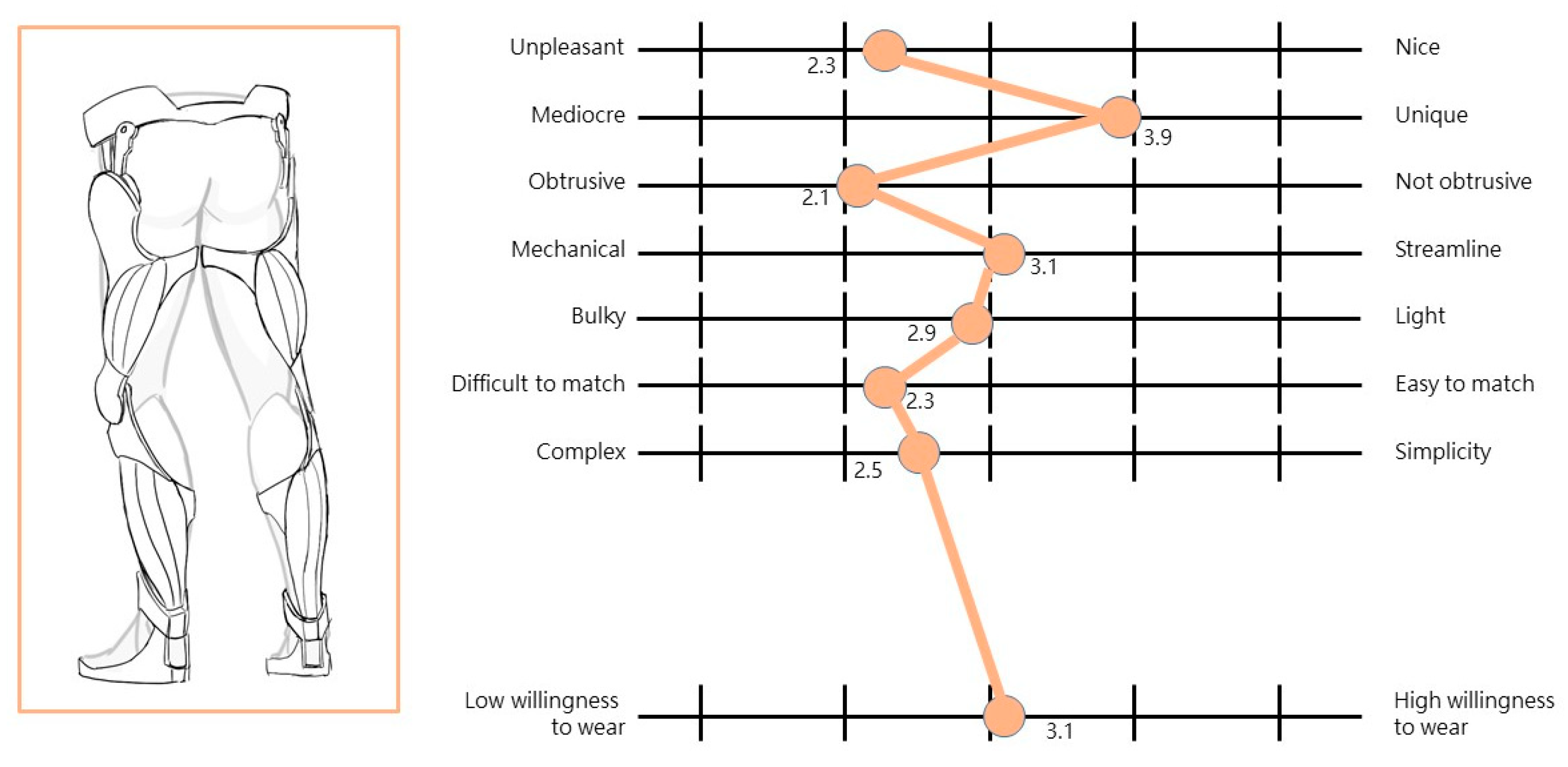
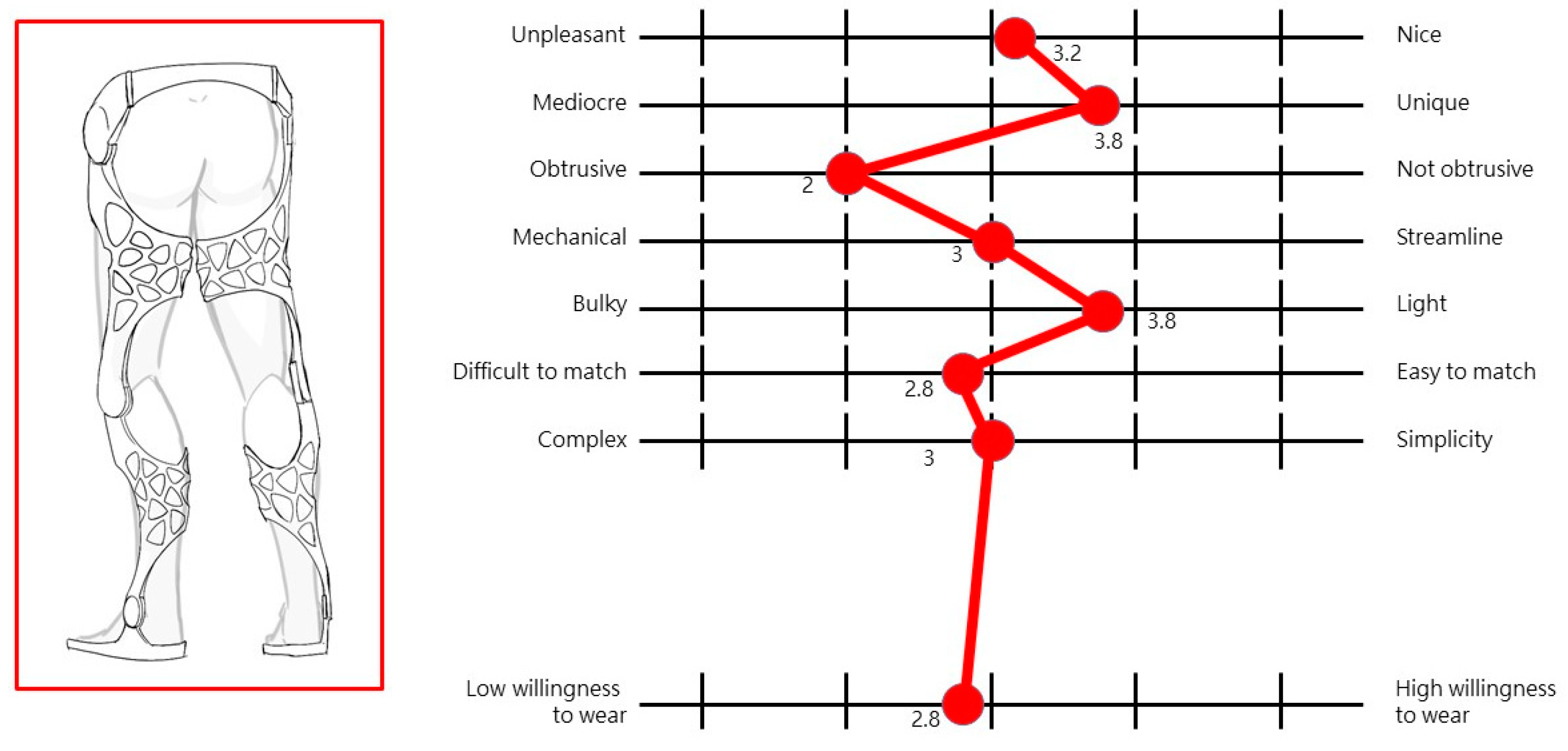
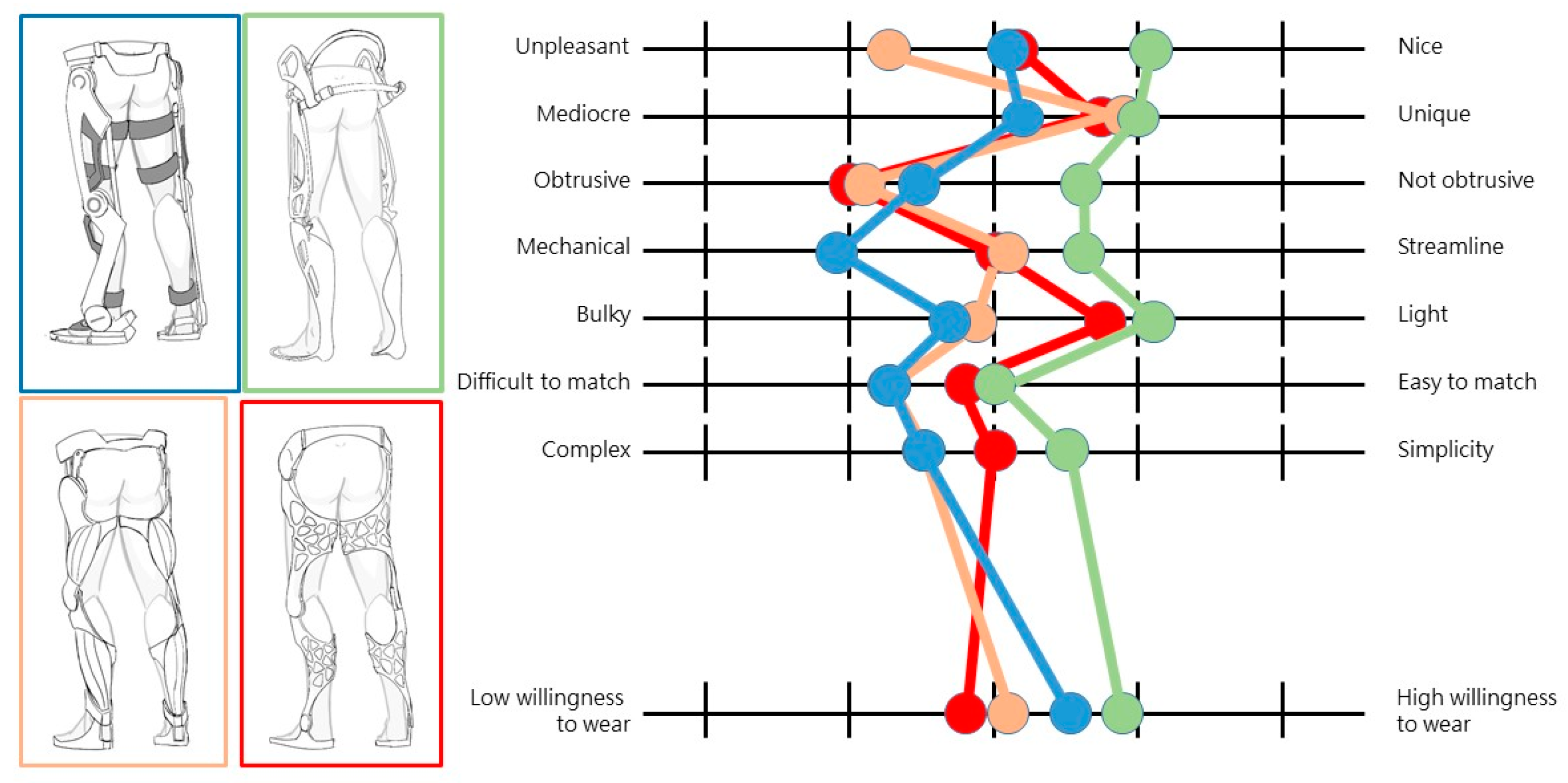
4.3. Modeling Classification of Wearable Robotic Exoskeleton
- 1.
- Mechanical type
- 2.
- Minimalistic type
- 3.
- Bionic type
- 4.
- Organic type
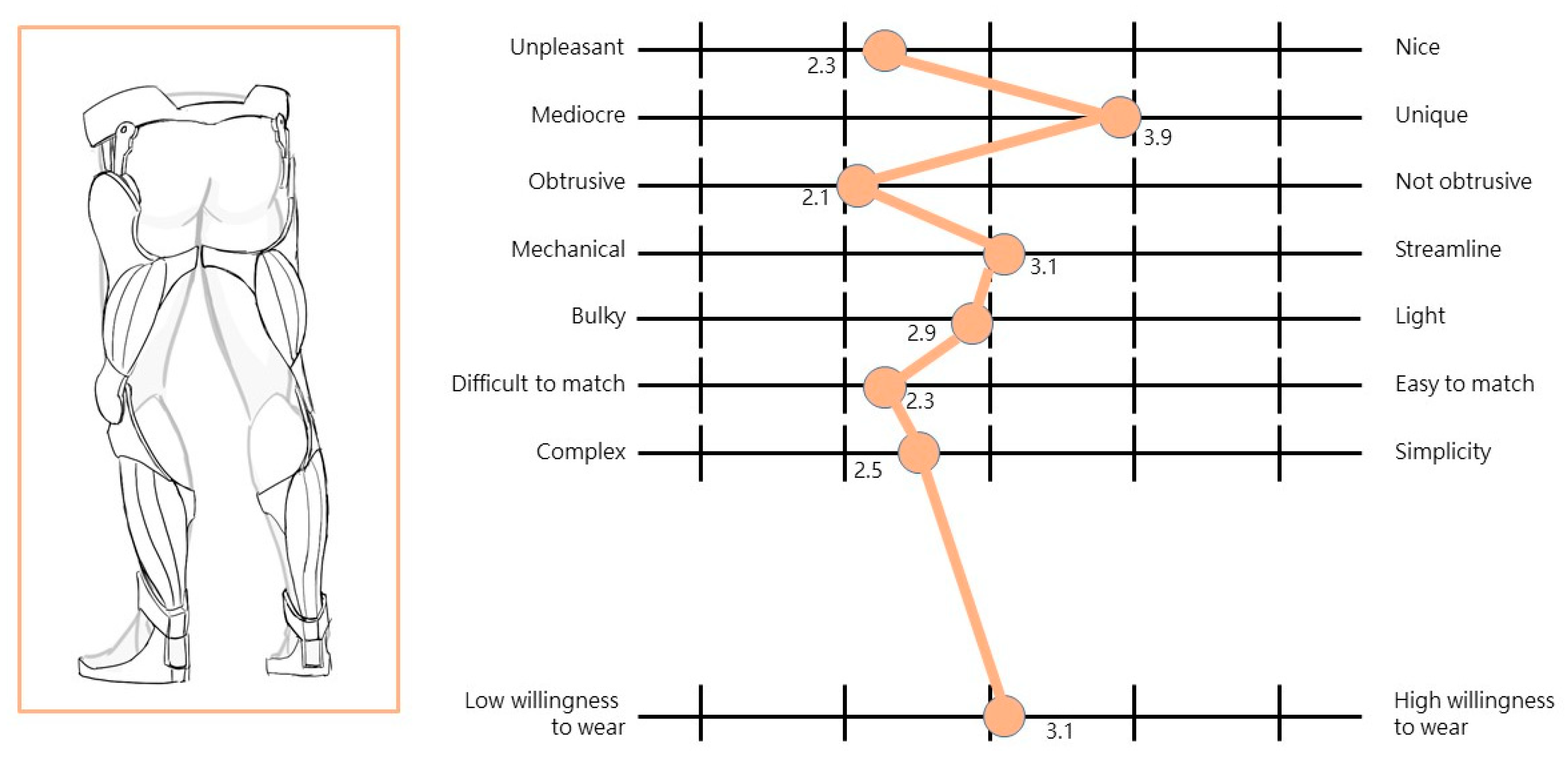
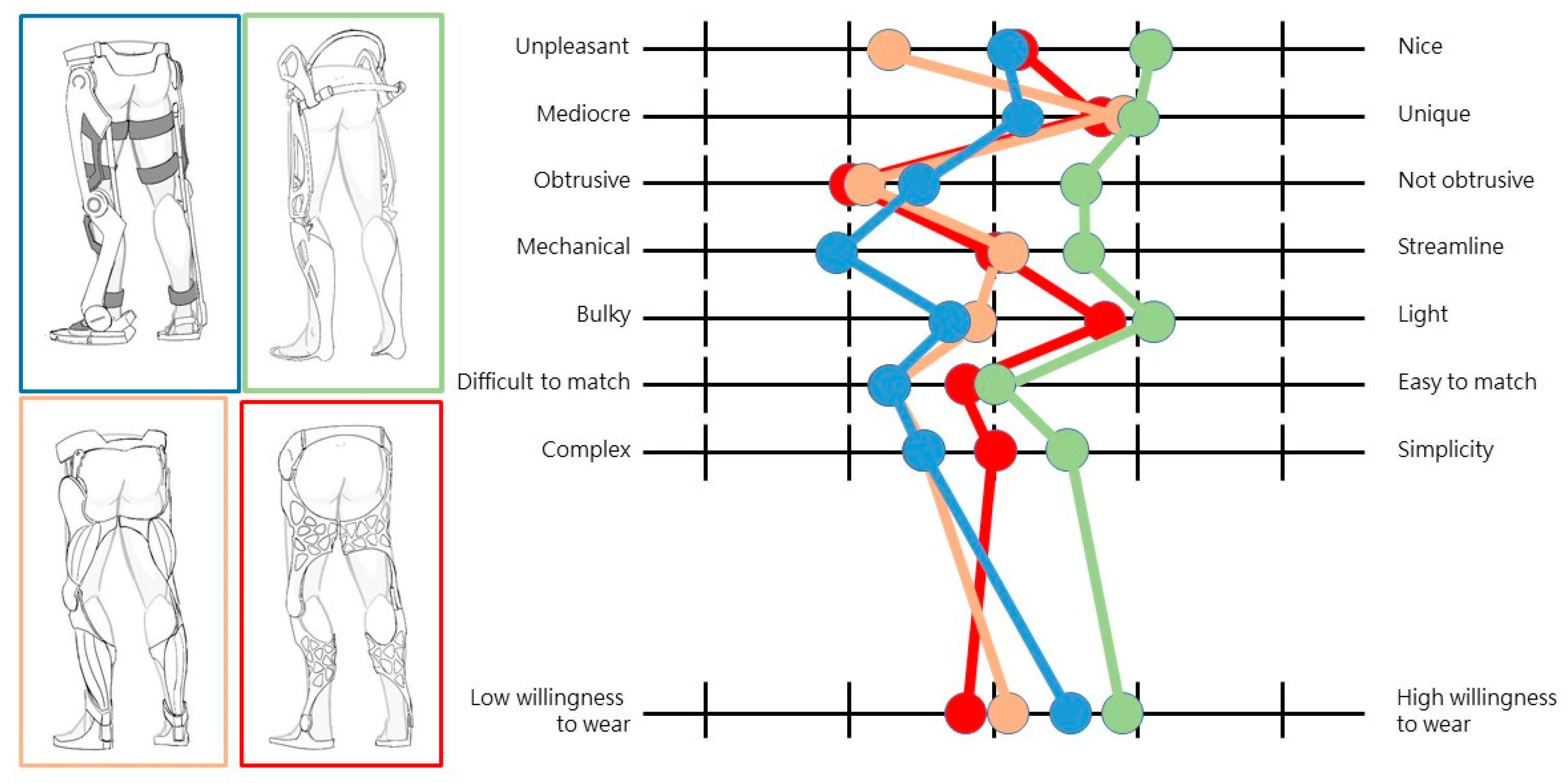
4.4. Wear Acceptance Survey
- View four images of the Wearable Robotic Exoskeleton;
- Fill in the “Semantic Difference Scale” according to the feeling that the image gives you, and fill in the wearing acceptance according to your wishes.
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- National Development Commission, Population Estimation Inquiry System. Available online: https://pop-proj.ndc.gov.tw/chart.aspx?c=10&uid=66&pid=60 (accessed on 10 May 2021).
- Ministry of Internal Affairs of the Republic of China, Statistical Indicators. Available online: https://www.moi.gov.tw/cp.aspx?n=602 (accessed on 10 May 2021).
- Xu, Y.-L.; Bai, L. Prospective Development Suggestions for the Application of Smart Technology in the Life and Care of the Elderly. J. Welf. Technol. Serv. Manag. 2018, 6, 325. [Google Scholar] [CrossRef]
- Industrial Technology Research Institute. [Wearable battery materials] and [Wastewater treatment and recycling] technical topics. Ind. Mater. Mag. 2016, 350. Available online: https://www.itri.org.tw/index.aspx (accessed on 10 May 2021).
- Qiu, J.-R. How can information technology help the life of the elderly in the elderly society? A discussion from the perspective and experience of the elderly in Taiwan. Taiwan Forum Gerontol. 2019. Available online: http://bbc035r.web3.ncku.edu.tw (accessed on 10 May 2021).
- Huang, J.-R. Application of Service Design and Product Innovation Integration Model in Toilet Accessory Product Planning. Master’s Thesis, Department of Digital Content Technology, National Taichung University of Education, Taichung, Taiwan, 2010. [Google Scholar]
- Jang, Y.; Li, W.S.; Hwang, M.T.; Chang, W.Y. Factors related to eturn to work following a work-oriented occupational therapy program for individuals with physical disabilities. J. Occup. Rehabil. 1998, 8, 141–151. [Google Scholar] [CrossRef]
- Nobuyuki, M.; Tomomi, Y.; Tetsuo, M. Experimental study on assistive device use and long-term care movements. Labor Sci. 2012, 88, 81–93. [Google Scholar]
- Li, C.-F. Discussion on product design for senior users. J. Des. 2006, 11, 65–79. [Google Scholar]
- Turner, J.S.; Helms, D.S. Contemporary Adulthood; Holt, Reinehart and Winton: New York, NY, USA, 1986. [Google Scholar]
- Huang, F.-S. Adult Psychology and Learning; National Normal University Library: Taipei, Taiwan, 1989. [Google Scholar]
- Zhuang, Y.-Z. Analysis of the Psychological Process of Elderly People’s Use of Action Devices. Master’s Thesis, Institute of Education for the Elderly, National Chung Cheng University, Chiayi County, Taiwan, 2010. [Google Scholar]
- Chen, Y.-Z. Theory and Practice of Elderly Welfare-Native Perspectives; Futaba: Taipei, Taiwan, 2007. [Google Scholar]
- Cai, W.-H. Sociology of Geriatrics; Wunan: Taipei, Taiwan, 2008. [Google Scholar]
- Zheng, G.-X. Research on the Introduction of Furniture Design into Home Appliances for the Elderly. Master’s Thesis, National Taipei University of Technology, Taipei, Taiwan, 2018. [Google Scholar]
- Yu, S.; van der Cammen, T.J.M. Electronic assistive technology for community-dwelling solo-living older adults: A systematic review. Maturitas 2019, 125, 50–59. [Google Scholar]
- Hanington, B.; Martin, B. Universal Methods of Design: 100 Ways to Reasearch Complex Problems, Develop Innovative Ideas, and Design Effective Solutions; Rockport Publishers: Gloucester, MA, USA, 2012; ISBN 978-986-6408-58-8. [Google Scholar]
- Jali, N.; Yunus, R.M.; Said, N.S. Environmental Colour Impact upon Human Behavior:A Review. Procedia Soc. Behav. Sci. 2012, 35, 54–62. [Google Scholar] [CrossRef] [Green Version]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lo, C.-H. A Study on Appearance Acceptance Appraisal of Elderly Mobility Assists. Sustainability 2021, 13, 10547. https://doi.org/10.3390/su131910547
Lo C-H. A Study on Appearance Acceptance Appraisal of Elderly Mobility Assists. Sustainability. 2021; 13(19):10547. https://doi.org/10.3390/su131910547
Chicago/Turabian StyleLo, Chi-Hung. 2021. "A Study on Appearance Acceptance Appraisal of Elderly Mobility Assists" Sustainability 13, no. 19: 10547. https://doi.org/10.3390/su131910547
APA StyleLo, C.-H. (2021). A Study on Appearance Acceptance Appraisal of Elderly Mobility Assists. Sustainability, 13(19), 10547. https://doi.org/10.3390/su131910547