
Static Output-Feedback Path-Tracking Controller Tolerant to Steering Actuator Faults for Distributed Driven Electric Vehicles

 ,
,  , and
, and
Abstract
1. Introduction
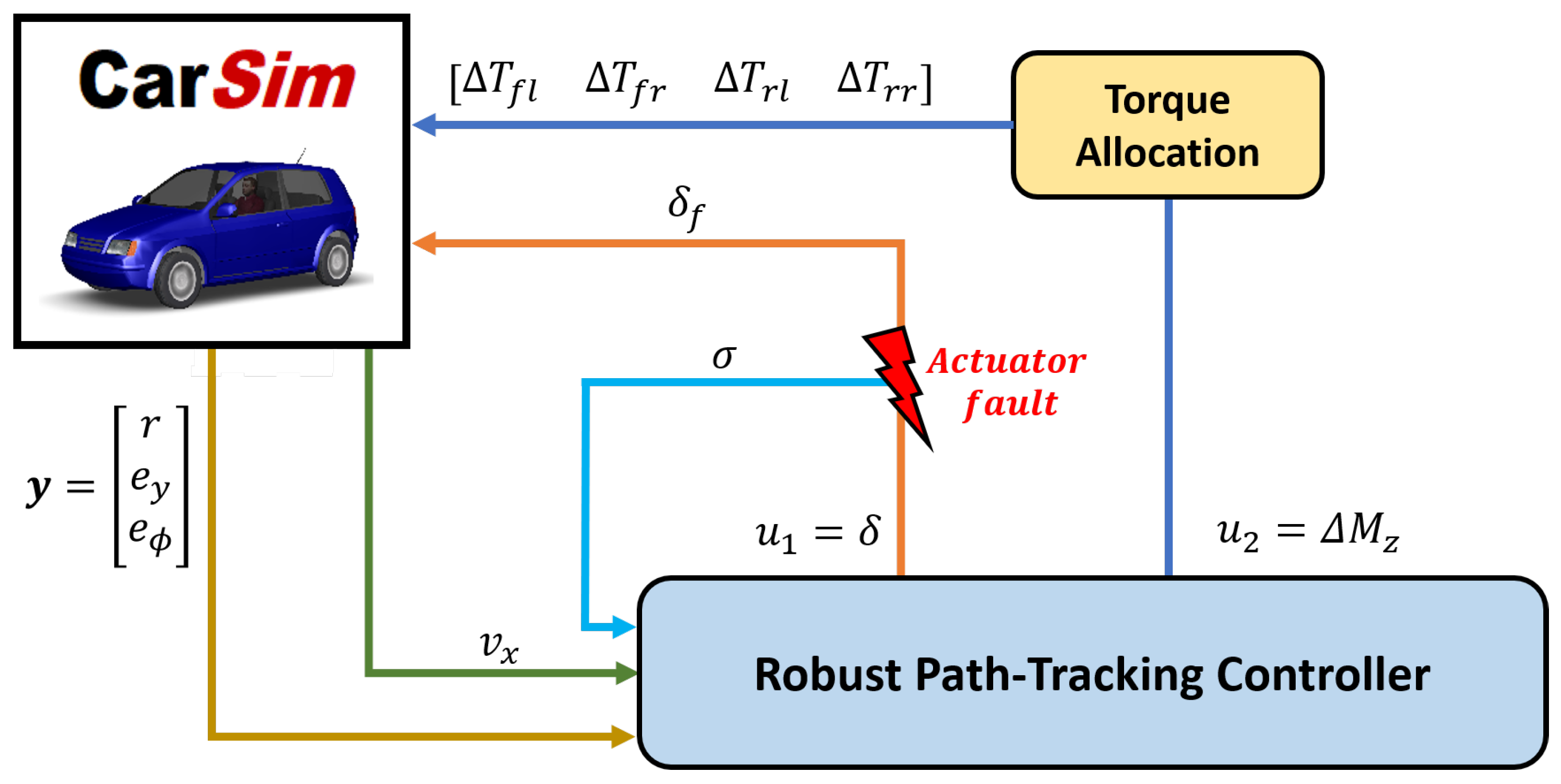
- A Multi-Input–Multi-Output (MIMO) SOF controller is developed for a path-tracking system, enabling operation in both fault-tolerant and fault-free modes. This novel approach enables the system to operate in a dual mode: under normal conditions, it relies only on the steering input actuator, and, in the event of a steering system fault, torque vectoring is activated to assist the vehicle and effectively compensate for the steering actuator faults.
- Vehicle uncertainties and nonlinearities caused by varying vehicle speeds are considered in the controller design using an LPV approach. This ensures that the system remains robust and stable under a wide range of operating conditions.
- The driving automation system presented in this work only requires on-board sensors that can be found in series-production vehicles to compute the control inputs. By eliminating the need for expensive sensors for the estimation of vehicle states such as sideslip angle, the practical implementation of the method is guaranteed.
2. Problem Formulation
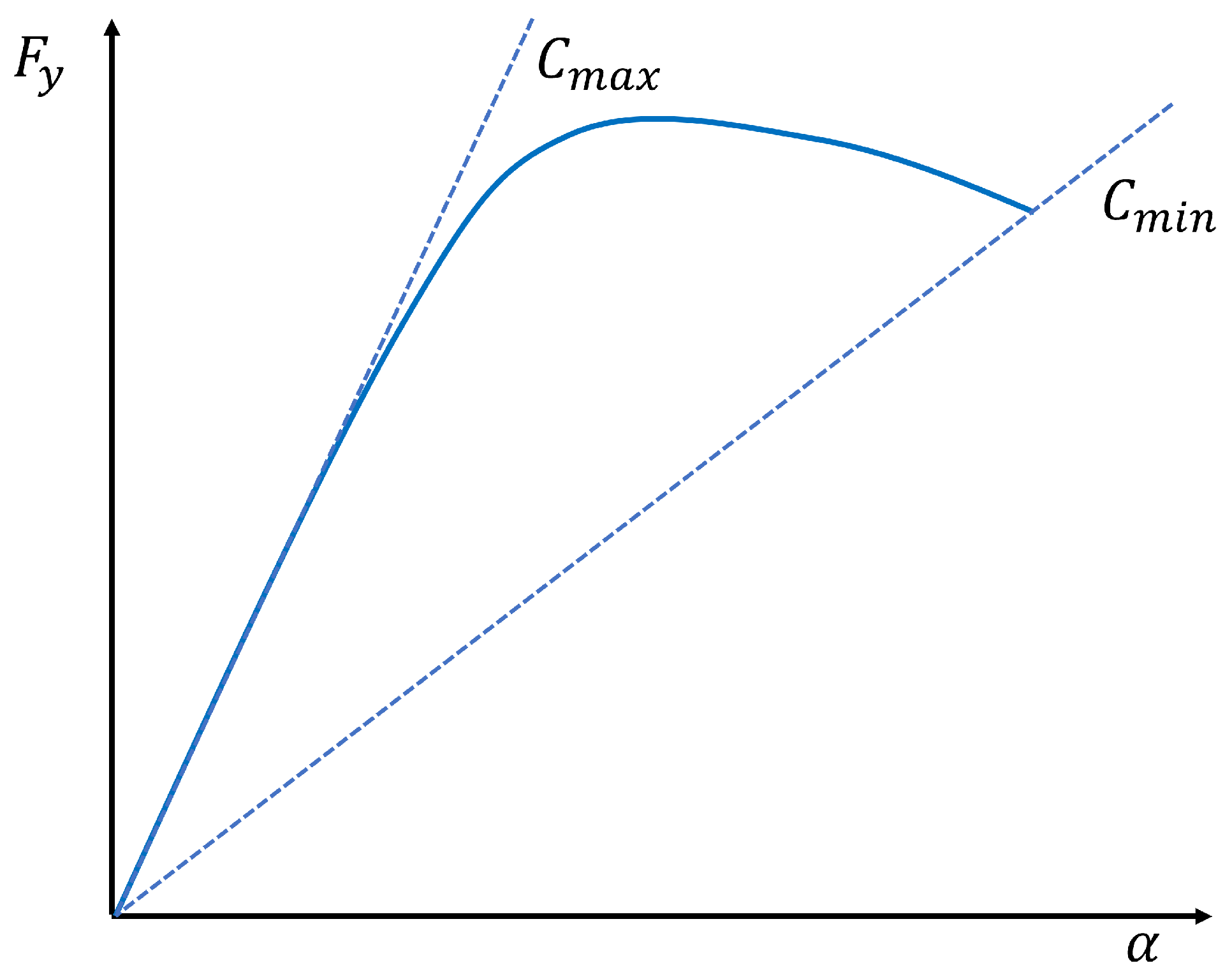
2.1. Vehicle Model
2.2. Path-Tracking Model
2.3. Combined Lateral Dynamics and Path-Tracking Model
2.4. Active Steering System Actuator Fault
2.5. Torque Allocation
3. Fault-Tolerant Controller Design
| Algorithm 1 Iterative procedure for solving bi-linear LMI problem. |
| Input: |
| Vehicle parameters from Table 1. |
| Output: |
| Controller gain matrices from (30) |
4. Results and Discussion
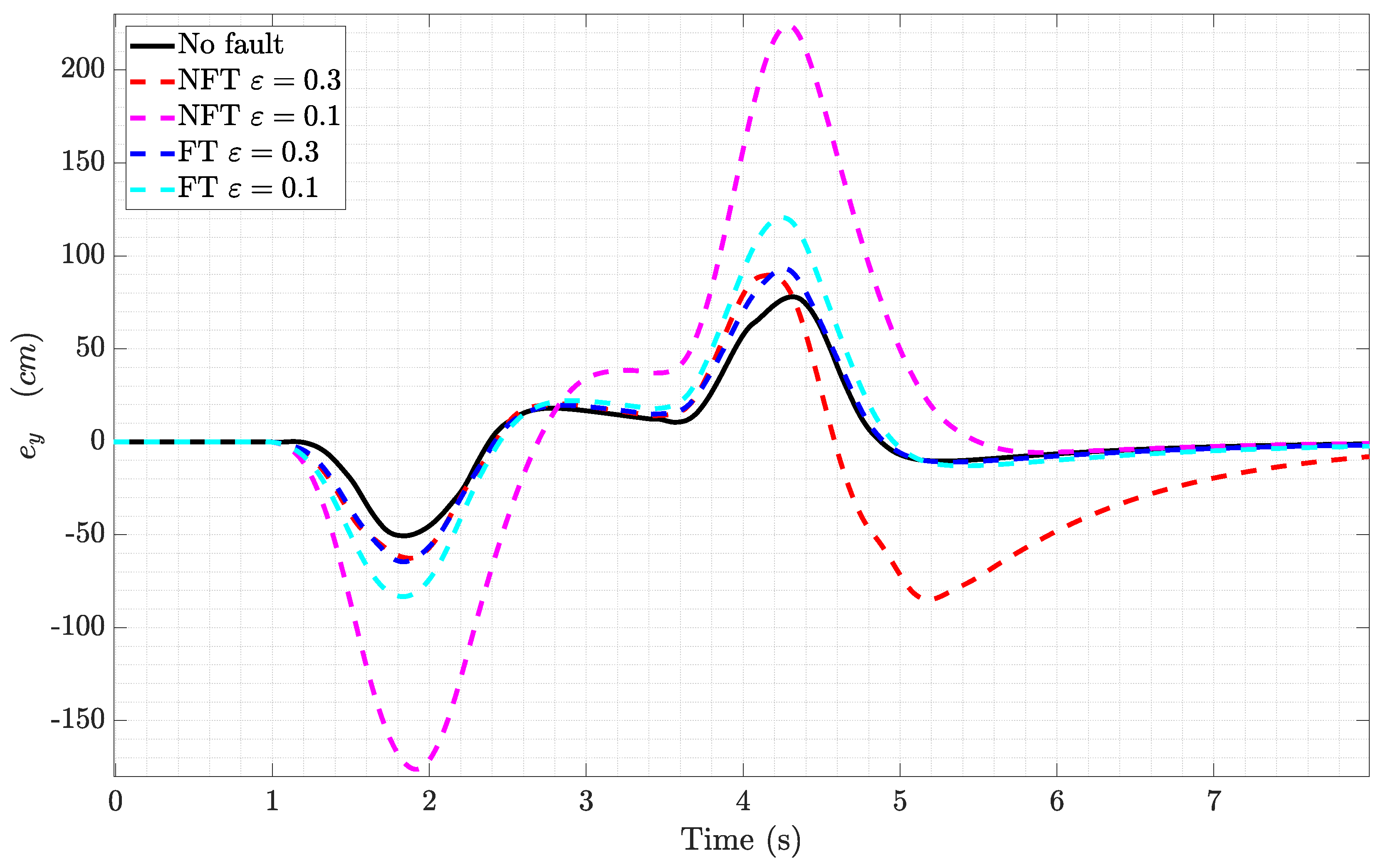
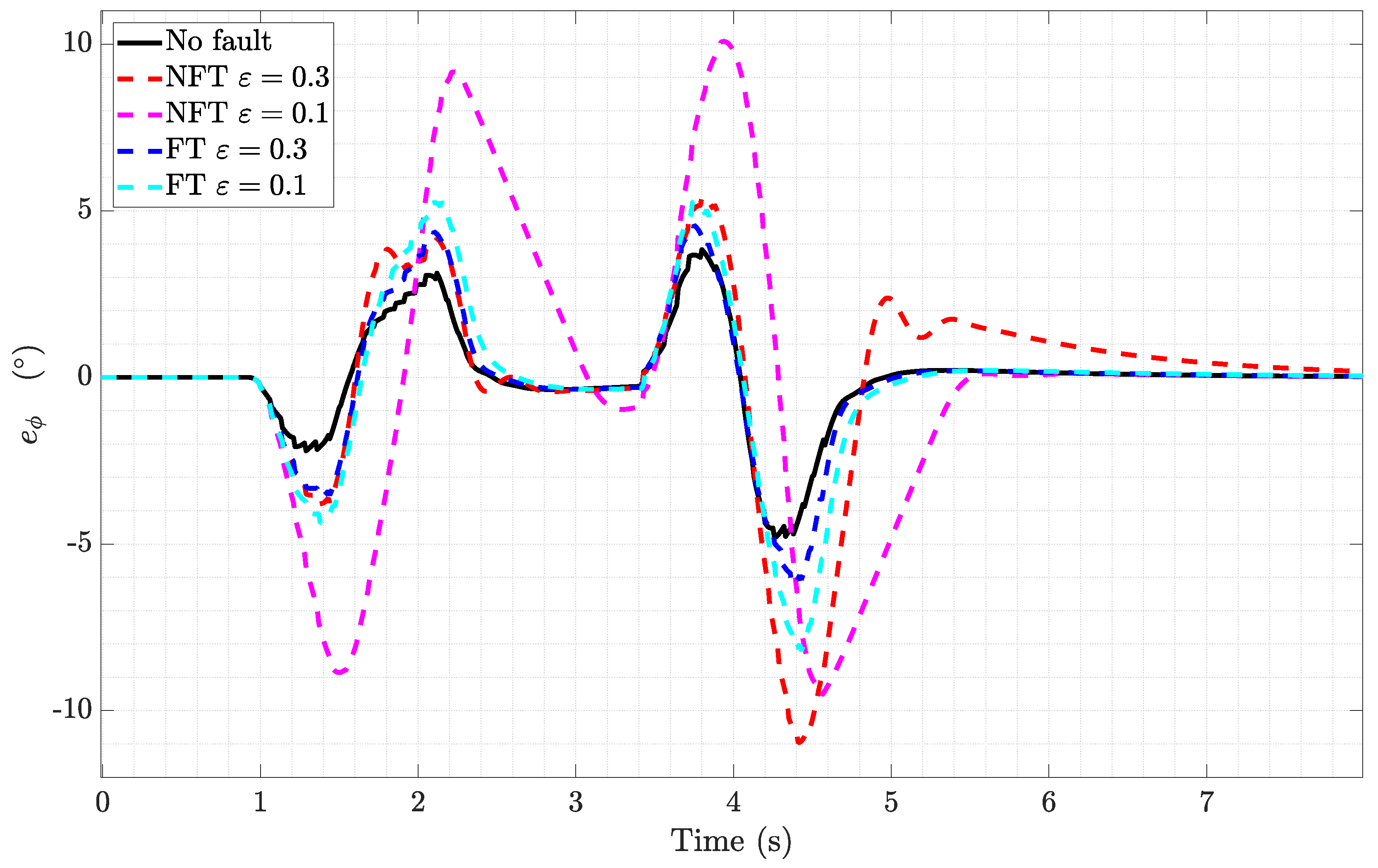
- (A)
- DLC maneuver under steering actuator degradation with and .
- (B)
- DLC maneuver under steering actuator saturation at and .
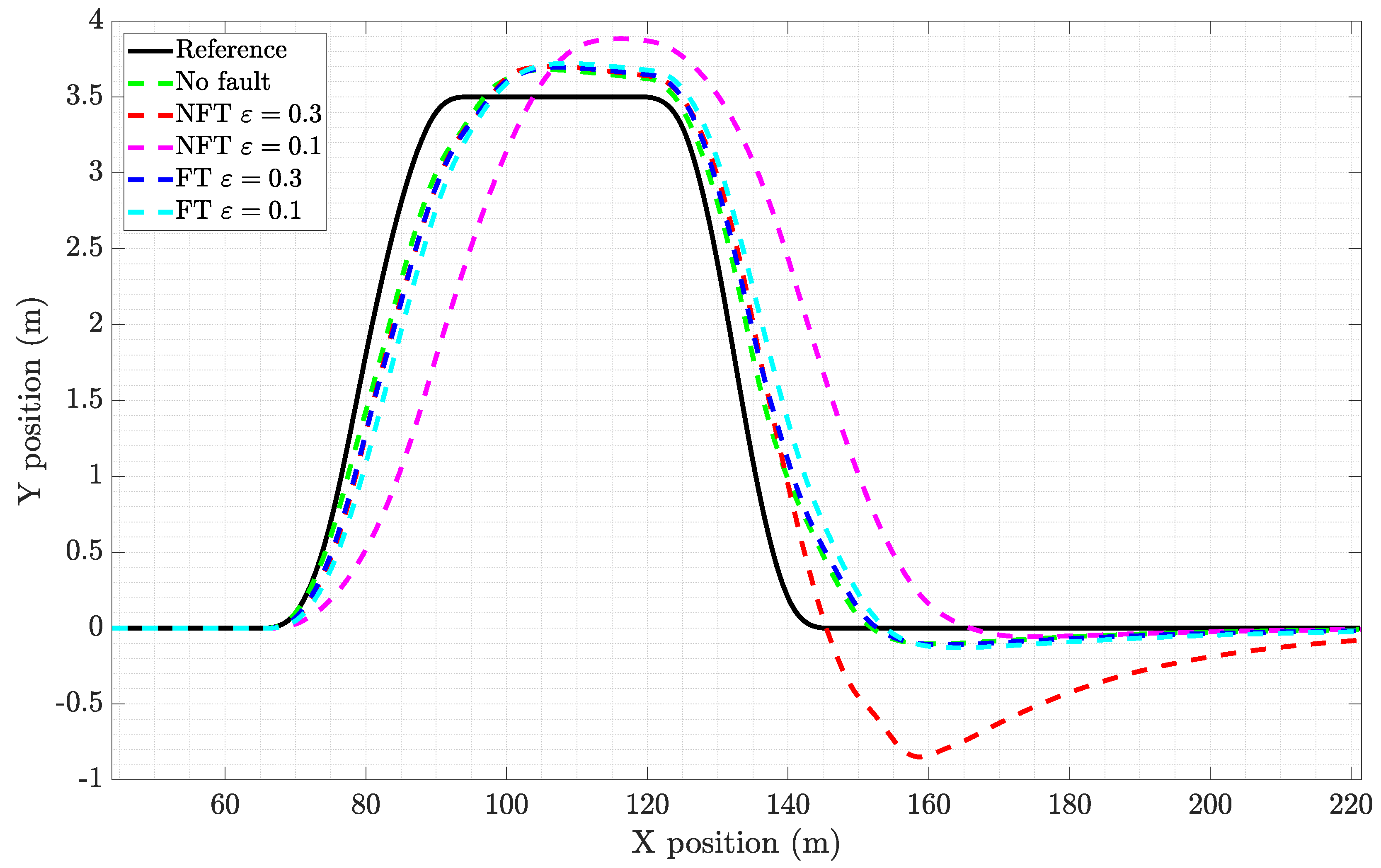
4.1. Case A: Loss of Effectiveness in the Steering Actuator
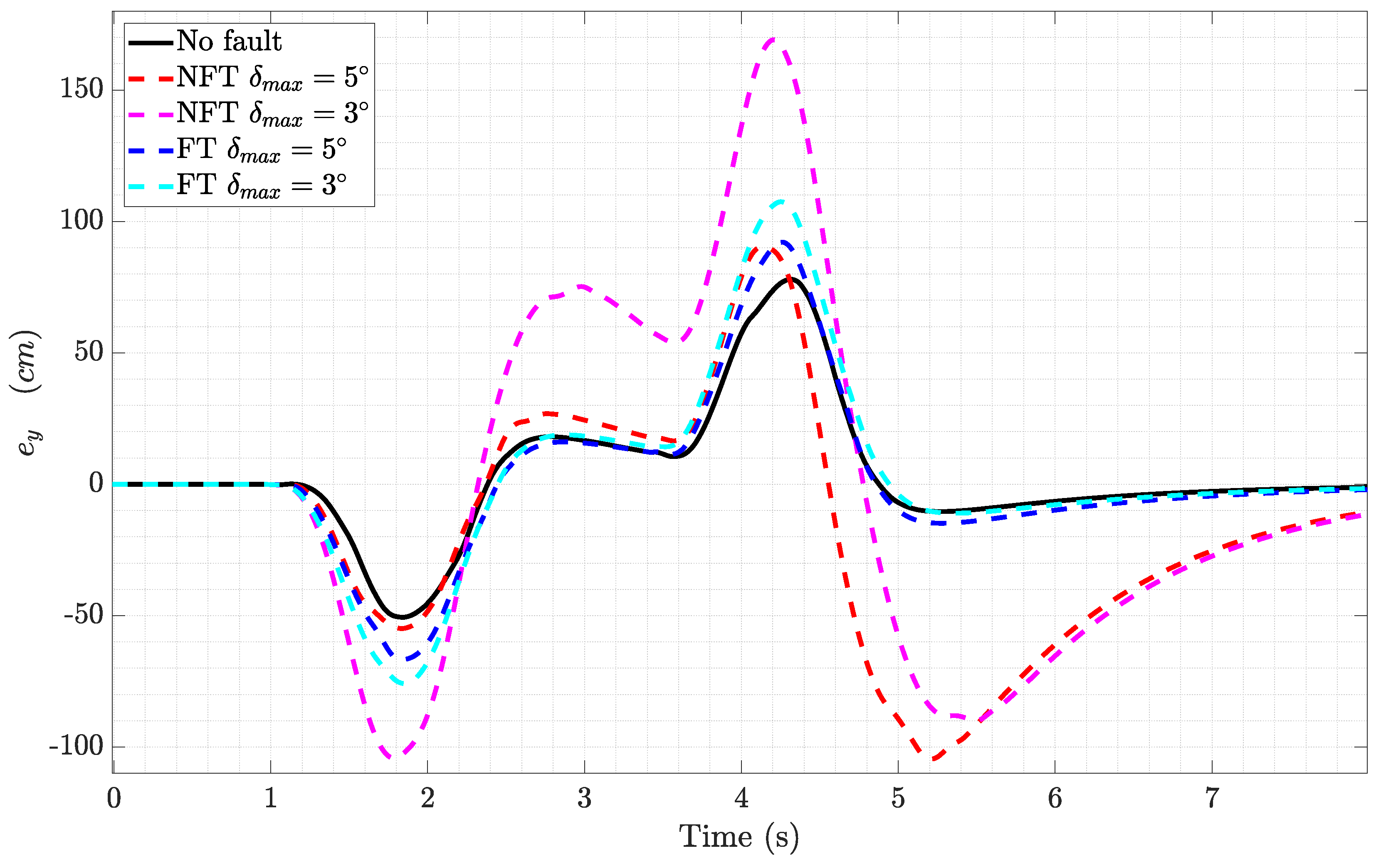
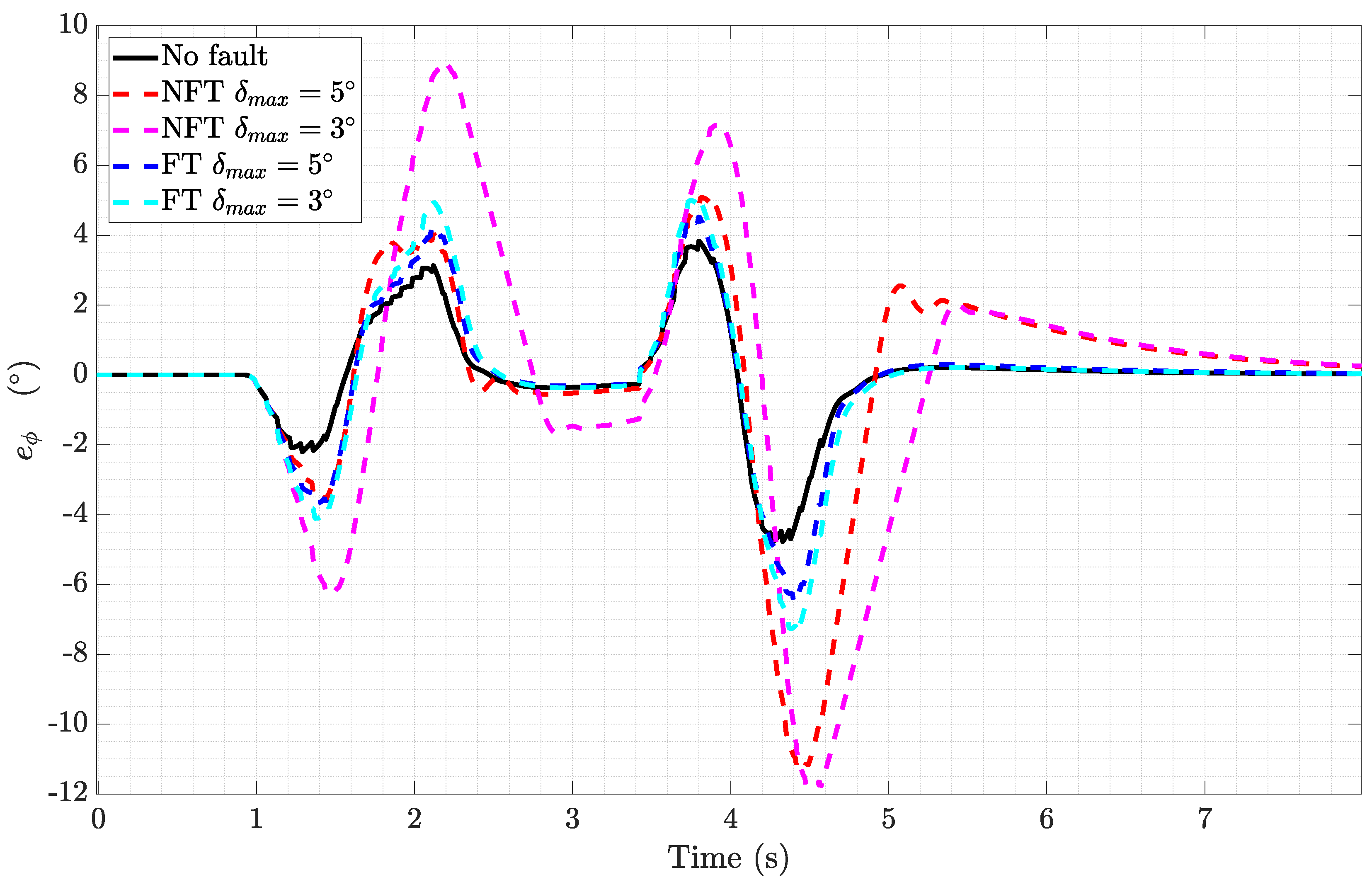
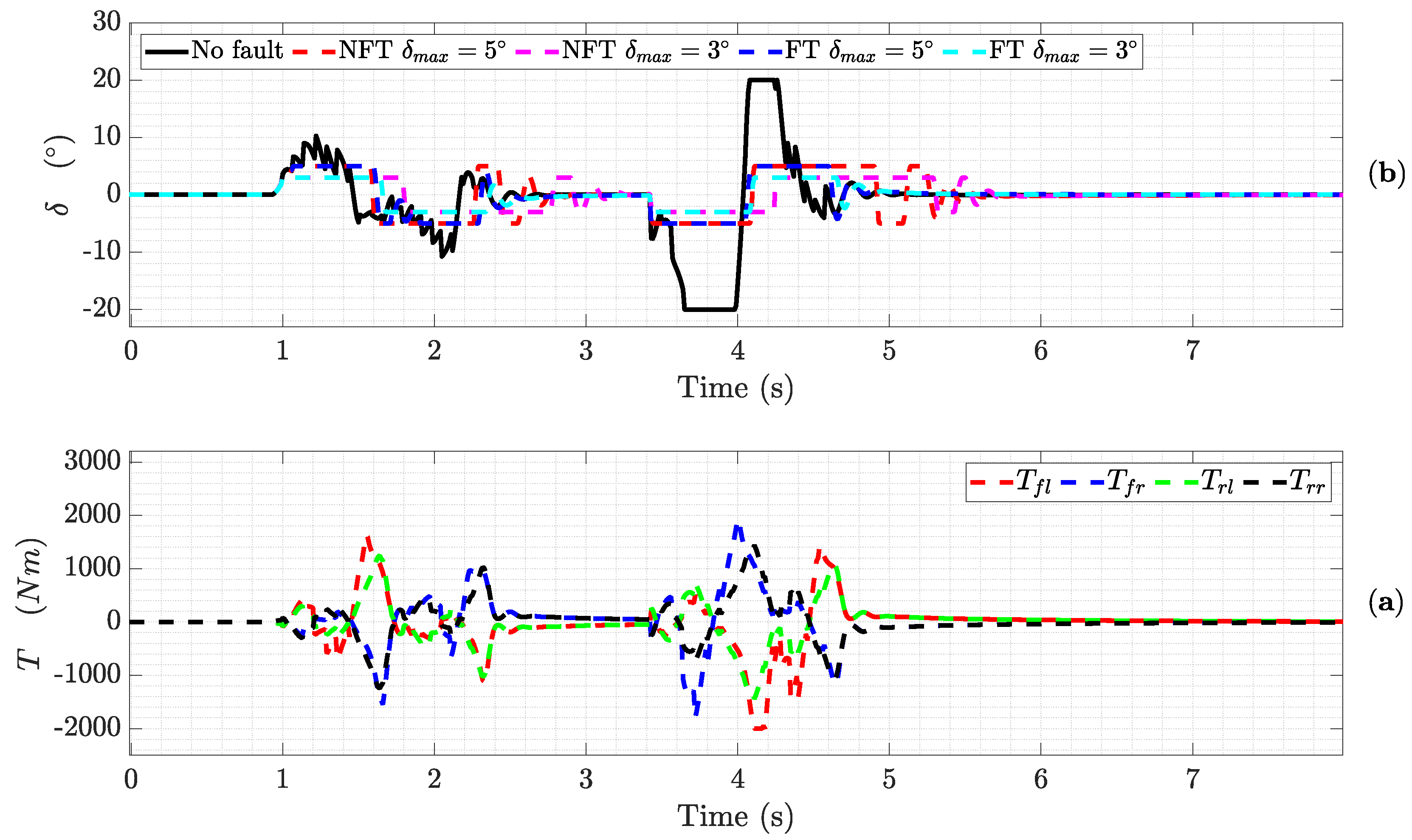
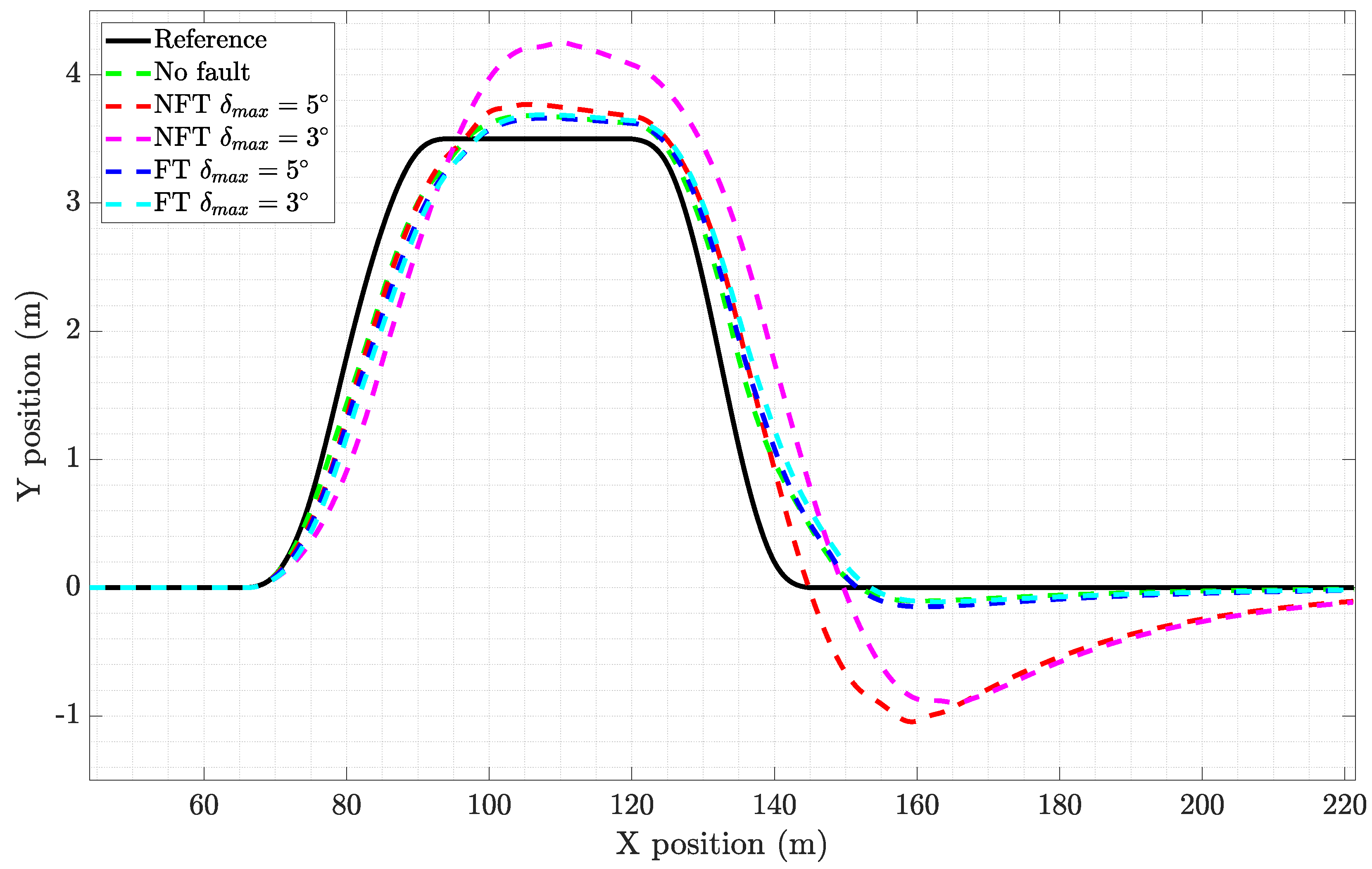
4.2. Case B: Steering Actuator Saturation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AV | Automated Vehicle |
| DDV | Distributed Driven Vehicle |
| DLC | Double Lane Change |
| EV | Electric Vehicle |
| IMU | Inertial Measurement Unit |
| LMI | Linear Matrix Inequality |
| LPV | Linear Parameter Varying |
| LQR | Linear Quadratic Regulator |
| MPC | Model Predictive Control |
| TV | Torque Vectoring |
References
- Wang, Z.; Qu, X.; Cai, Q.; Chu, F.; Wang, J.; Shi, D. Efficiency Analysis of Electric Vehicles with AMT and Dual-Motor Systems. World Electr. Veh. J. 2024, 15, 182. [Google Scholar] [CrossRef]
- Puma-Benavides, D.S.; Calderon-Najera, J.d.D.; Izquierdo-Reyes, J.; Galluzzi, R.; Llanes-Cedeño, E.A. Methodology to Improve an Extended-Range Electric Vehicle Module and Control Integration Based on Equivalent Consumption Minimization Strategy. World Electr. Veh. J. 2024, 15, 439. [Google Scholar] [CrossRef]
- Hussan, U.; Majeed, M.A.; Asghar, F.; Waleed, A.; Khan, A.; Javed, M.R. Fuzzy logic-based voltage regulation of hybrid energy storage system in hybrid electric vehicles. Electr. Eng. 2022, 104, 485–495. [Google Scholar] [CrossRef]
- Amer, N.H.; Hudha, K.; Zamzuri, H.; Aparow, V.R.; Abidin, A.F.Z.; Abd Kadir, Z.; Murrad, M. Adaptive modified Stanley controller with fuzzy supervisory system for trajectory tracking of an autonomous armoured vehicle. Robot. Auton. Syst. 2018, 105, 94–111. [Google Scholar] [CrossRef]
- Jianhui, Z.; Hongbo, G.; Xinyu, Z.; Yinglin, Z. Automatic driving control based on time delay dynamic predictions. J. Tsinghua Univ. (Sci. Technol.) 2018, 58, 432–437. [Google Scholar]
- Moreno-Gonzalez, M.; Artuñedo, A.; Villagra, J.; Join, C.; Fliess, M. Speed-adaptive model-free path-tracking control for autonomous vehicles: Analysis and design. Vehicles 2023, 5, 698–717. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, X. Autonomous path tracking control of intelligent electric vehicles based on lane detection and optimal preview method. Expert Syst. Appl. 2019, 121, 38–48. [Google Scholar] [CrossRef]
- Xu, S.; Peng, H. Design, analysis, and experiments of preview path tracking control for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 48–58. [Google Scholar] [CrossRef]
- Yang, S.; Qian, Y.; Hu, W.; Xu, J.; Sun, H. Adaptive MPC-Based Lateral Path-Tracking Control for Automatic Vehicles. World Electr. Veh. J. 2024, 15, 95. [Google Scholar] [CrossRef]
- Tang, L.; Yan, F.; Zou, B.; Wang, K.; Lv, C. An improved kinematic model predictive control for high-speed path tracking of autonomous vehicles. IEEE Access 2020, 8, 51400–51413. [Google Scholar] [CrossRef]
- Stano, P.; Montanaro, U.; Tavernini, D.; Tufo, M.; Fiengo, G.; Novella, L.; Sorniotti, A. Model predictive path tracking control for automated road vehicles: A review. Annu. Rev. Control 2023, 55, 194–236. [Google Scholar] [CrossRef]
- Viadero-Monasterio, F.; García, J.; Meléndez-Useros, M.; Jiménez-Salas, M.; Boada, B.L.; López Boada, M.J. Simultaneous Estimation of Vehicle Sideslip and Roll Angles Using an Event-Triggered-Based IoT Architecture. Machines 2024, 12, 53. [Google Scholar] [CrossRef]
- Hussan, U.; Hassan, M.; Ayub, M.A.; Peng, J.C.; Rasheed, H.; Jiang, H.; Asghar, F. Smooth and Uninterrupted Operation of Standalone DC Microgrid Under High and Low Penetration of RESs. IEEE Access 2024, 12, 48620–48629. [Google Scholar] [CrossRef]
- Viadero-Monasterio, F.; Gutiérrez-Moizant, R.; Meléndez-Useros, M.; López Boada, M.J. Static Output Feedback Control for Vehicle Platoons with Robustness to Mass Uncertainty. Electronics 2025, 14, 139. [Google Scholar] [CrossRef]
- Guo, J.; Luo, Y.; Hu, C.; Tao, C.; Li, K. Robust combined lane keeping and direct yaw moment control for intelligent electric vehicles with time delay. Int. J. Automot. Technol. 2019, 20, 289–296. [Google Scholar] [CrossRef]
- Torres-Romero, L.A.; Ruiz-Cruz, R.; González-Jiménez, L.E. Path-Following Sliding Mode Controller for an Electric Vehicle Considering Actuator Dynamics. Machines 2024, 12, 219. [Google Scholar] [CrossRef]
- Taghavifar, H.; Rakheja, S. Path-tracking of autonomous vehicles using a novel adaptive robust exponential-like-sliding-mode fuzzy type-2 neural network controller. Mech. Syst. Signal Process. 2019, 130, 41–55. [Google Scholar] [CrossRef]
- Xu, J.; Tang, J.; Liu, C. Robust H∞ output-feedback control for lane keeping of autonomous ground vehicles considering the system uncertainties. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2024. [Google Scholar] [CrossRef]
- Wang, J.; Wang, B.; Liu, C.; Zhang, L.; Li, L. A Novel Robust H∞ Control Approach Based on Vehicle Lateral Dynamics for Practical Path Tracking Applications. World Electr. Veh. J. 2024, 15, 293. [Google Scholar] [CrossRef]
- Liu, T.; Wang, X.; Zhao, J.; Wong, P.K.; Wang, Y. Robust H-infinity fuzzy output feedback control for path following of FWID-EVs with actuator saturation. Int. J. Fuzzy Syst. 2023, 25, 1674–1688. [Google Scholar] [CrossRef]
- Nodozi, I.; Rahmani, M. LMI-based robust mixed-integer model predictive control for hybrid systems. Int. J. Control 2020, 93, 2336–2345. [Google Scholar] [CrossRef]
- Yu, Z.; Zhao, R.; Yuan, T. Lateral-Stability-Oriented Path-Tracking Control Design for Four-Wheel Independent Drive Autonomous Vehicles with Tire Dynamic Characteristics under Extreme Conditions. World Electr. Veh. J. 2024, 15, 465. [Google Scholar] [CrossRef]
- Liang, J.; Tian, Q.; Feng, J.; Pi, D.; Yin, G. A Polytopic Model-Based Robust Predictive Control Scheme for Path Tracking of Autonomous Vehicles. IEEE Trans. Intell. Veh. 2024, 9, 3928–3939. [Google Scholar] [CrossRef]
- Meléndez-Useros, M.; Jiménez-Salas, M.; Viadero-Monasterio, F.; López-Boada, M.J. Novel Methodology for Integrated Actuator and Sensors Fault Detection and Estimation in an Active Suspension System. IEEE Trans. Reliab. 2024. [Google Scholar] [CrossRef]
- Park, S.; Oh, K.; Jeong, Y.; Yi, K. Model predictive control-based fault detection and reconstruction algorithm for longitudinal control of autonomous driving vehicle using multi-sliding mode observer. Microsyst. Technol. 2020, 26, 239–264. [Google Scholar] [CrossRef]
- He, S.; Xu, X.; Xie, J.; Wang, F.; Liu, Z.; Zhao, F. Fault detection and fault-tolerant control of autonomous steering system for intelligent vehicles combining Bi-LSTM and SPRT. Measurement 2023, 212, 112708. [Google Scholar] [CrossRef]
- Viadero-Monasterio, F.; Boada, B.L.; Zhang, H.; Boada, M.J.L. Integral-Based Event Triggering Actuator Fault-Tolerant Control for an Active Suspension System Under a Networked Communication Scheme. IEEE Trans. Veh. Technol. 2023, 72, 13848–13860. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, G.; Zhou, H.; Zhao, W. Adaptive sliding mode fault-tolerant coordination control for four-wheel independently driven electric vehicles. IEEE Trans. Ind. Electron. 2018, 65, 9090–9100. [Google Scholar] [CrossRef]
- Chen, L.; Li, X.; Xiao, W.; Li, P.; Zhou, Q. Fault-tolerant control for uncertain vehicle active steering systems with time-delay and actuator fault. Int. J. Control Autom. Syst. 2019, 17, 2234–2241. [Google Scholar] [CrossRef]
- Tian, C.; Huang, C.; Huang, H.; Zhao, J. Fault-Tolerant Path Tracking Control for Electric Vehicles with Steering Actuator Faults via Learning-Based Fault Detection. In Proceedings of the 2024 IEEE 22nd International Conference on Industrial Informatics (INDIN), Beijing, China, 17–20 August 2024; pp. 1–6. [Google Scholar]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Passive fault-tolerant path following control of autonomous distributed drive electric vehicle considering steering system fault. Mech. Syst. Signal Process. 2019, 123, 298–315. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Q.; Zhang, T.; Wang, J. Path following fault-tolerant control of distributed drive autonomous unmanned vehicle via adaptive terminal sliding mode. J. Frankl. Inst. 2024, 361, 429–452. [Google Scholar] [CrossRef]
- Sun, T.; Wong, P.K.; Wang, X. Back Propagation Neural Network-Based Fault Diagnosis and Fault Tolerant Control of Distributed Drive Electric Vehicles Based on Sliding Mode Control-Based Direct Yaw Moment Control. Vehicles 2023, 6, 93–119. [Google Scholar] [CrossRef]
- Wang, Y.; Zong, C.; Guo, H.; Chen, H. Fault-tolerant path-following control for in-wheel-motor-driven autonomous ground vehicles with differential steering. Asian J. Control 2020, 22, 1230–1240. [Google Scholar] [CrossRef]
- Han, J.; Zhang, J.; Lv, C.; He, C.; Wei, H.; Zhao, S. Robust Fault Tolerant Path Tracking Control for Intelligent Vehicle under Steering System Faults. IEEE Trans. Intell. Veh. 2024. [Google Scholar] [CrossRef]
- Huang, X.; Zha, Y.; Lv, X.; Quan, X. Torque Fault-Tolerant Hierarchical Control of 4WID Electric Vehicles Based on Improved MPC and SMC. IEEE Access 2023, 11, 132718–132734. [Google Scholar] [CrossRef]
- Zhang, H.; Liang, J.; Jiang, H.; Cai, Y.; Xu, X. Stability research of distributed drive electric vehicle by adaptive direct yaw moment control. IEEE Access 2019, 7, 106225–106237. [Google Scholar] [CrossRef]
- Villano, E.; Lenzo, B.; Sakhnevych, A. Cross-combined UKF for vehicle sideslip angle estimation with a modified Dugoff tire model: Design and experimental results. Meccanica 2021, 56, 2653–2668. [Google Scholar] [CrossRef]
- Meléndez-Useros, M.; Jiménez-Salas, M.; Viadero-Monasterio, F.; Boada, B.L. Tire slip H∞ control for optimal braking depending on road condition. Sensors 2023, 23, 1417. [Google Scholar] [CrossRef]
- May, M.P.; Henning, K.U.; Sawodny, O. Experimental validation of sensor fault estimation for vehicle dynamics with a nonlinear tire model. Control Eng. Pract. 2023, 141, 105725. [Google Scholar] [CrossRef]
- Li, W.; Xie, Z.; Wong, P.K.; Mei, X.; Zhao, J. Adaptive-Event-Trigger-Based Fuzzy Nonlinear Lateral Dynamic Control for Autonomous Electric Vehicles Under Insecure Communication Networks. IEEE Trans. Ind. Electron. 2021, 68, 2447–2459. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Y.; Zhang, F. Personalized path generation and robust H∞ output-feedback path following control for automated vehicles considering driving styles. IET Intell. Transp. Syst. 2021, 15, 1582–1595. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Rath, J.; Guerra, T.M.; Palhares, R.; Zhang, H. Robust set-invariance based fuzzy output tracking control for vehicle autonomous driving under uncertain lateral forces and steering constraints. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5849–5860. [Google Scholar] [CrossRef]
- Viadero-Monasterio, F.; Nguyen, A.T.; Lauber, J.; Boada, M.J.L.; Boada, B.L. Event-Triggered Robust Path Tracking Control Considering Roll Stability Under Network-Induced Delays for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 14743–14756. [Google Scholar] [CrossRef]
- Wang, Y.; Zong, C.; Li, K.; Chen, H. Fault-tolerant control for in-wheel-motor-driven electric ground vehicles in discrete time. Mech. Syst. Signal Process. 2019, 121, 441–454. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, H.; Huang, X.; Wang, J.; Yu, H.; Graaf, R. Active fault-tolerant control for electric vehicles with independently driven rear in-wheel motors against certain actuator faults. IEEE Trans. Control Syst. Technol. 2015, 24, 1557–1572. [Google Scholar] [CrossRef]
- Mangia, A.; Lenzo, B.; Sabbioni, E. An integrated torque-vectoring control framework for electric vehicles featuring multiple handling and energy-efficiency modes selectable by the driver. Meccanica 2021, 56, 991–1010. [Google Scholar] [CrossRef]
- Viadero-Monasterio, F.; Meléndez-Useros, M.; Jiménez-Salas, M.; Boada, B.L. Robust Static Output Feedback Control of a Semi-Active Vehicle Suspension Based on Magnetorheological Dampers. Appl. Sci. 2024, 14, 10336. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value | Units |
|---|---|---|---|
| Cornering stiffness of the front tire | 80,750/109,250 | N/rad | |
| Cornering stiffness of the rear tire | 72,250/97,750 | N/rad | |
| Distance from CoG to front axis | 1.49 | m | |
| Distance from CoG to rear axis | 1.81 | m | |
| R | Wheel radius | 0.465 | m |
| Track width | 1.9 | m | |
| m | Vehicle total mass | 1700 | kg |
| Moment of inertia about the yaw axis | 3246.6 | kgm2 | |
| a | Look-ahead bias parameter | 7 | m |
| b | Look-ahead gain parameter | 0.5 | s |
| Case | (cm) | ||||
|---|---|---|---|---|---|
| MAX | RMS | MAX | RMS | ||
| No fault | Reference | 78.00 | 24.97 | 4.81 | 1.43 |
| Non-fault-tolerant | 89.60 | 41.13 | 10.96 | 2.86 | |
| Fault-tolerant | 93.21 | 30.30 | 6.24 | 1.85 | |
| Non-fault-tolerant | 223.89 | 80.71 | 10.08 | 4.29 | |
| Fault-tolerant | 120.64 | 39.83 | 8.20 | 2.33 | |
| Non-fault-tolerant | 104.55 | 46.81 | 11.32 | 2.98 | |
| Fault-tolerant | 92.12 | 30.13 | 6.52 | 1.86 | |
| Non-fault-tolerant | 169.09 | 66.43 | 11.86 | 4.02 | |
| Fault-tolerant | 107.51 | 35.19 | 7.38 | 2.12 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meléndez-Useros, M.; Viadero-Monasterio, F.; Jiménez-Salas, M.; López-Boada, M.J. Static Output-Feedback Path-Tracking Controller Tolerant to Steering Actuator Faults for Distributed Driven Electric Vehicles. World Electr. Veh. J. 2025, 16, 40. https://doi.org/10.3390/wevj16010040
Meléndez-Useros M, Viadero-Monasterio F, Jiménez-Salas M, López-Boada MJ. Static Output-Feedback Path-Tracking Controller Tolerant to Steering Actuator Faults for Distributed Driven Electric Vehicles. World Electric Vehicle Journal. 2025; 16(1):40. https://doi.org/10.3390/wevj16010040
Chicago/Turabian StyleMeléndez-Useros, Miguel, Fernando Viadero-Monasterio, Manuel Jiménez-Salas, and María Jesús López-Boada. 2025. "Static Output-Feedback Path-Tracking Controller Tolerant to Steering Actuator Faults for Distributed Driven Electric Vehicles" World Electric Vehicle Journal 16, no. 1: 40. https://doi.org/10.3390/wevj16010040
APA StyleMeléndez-Useros, M., Viadero-Monasterio, F., Jiménez-Salas, M., & López-Boada, M. J. (2025). Static Output-Feedback Path-Tracking Controller Tolerant to Steering Actuator Faults for Distributed Driven Electric Vehicles. World Electric Vehicle Journal, 16(1), 40. https://doi.org/10.3390/wevj16010040