Abstract
The use of dedicated lanes, known as managed lanes (MLs), on freeways is an established traffic management strategy to reduce congestion. Allowing automated vehicles (AVs) in existing MLs or dedicating MLs for AVs, referred to as AVMLs, has been suggested in the literature as a tool to improve traffic operation and safety performance as AVs and driver-operated vehicles (DVs) coexist in a mixed-vehicle environment. This paper focuses on investigating the safety impacts of deploying AVMLs on freeways by repurposing general-purpose lanes (GPLs). Four ML strategies considering different lane positions and access controls were implemented in a traffic microsimulation under different AV market adoption rates (MARs) and traffic demand levels, and trajectories were used to extract rear-end and lane change conflicts. The time-to-collision (TTC) surrogate safety measure was used to identify critical conflicts using a time threshold dependent on the type of following vehicle. Rates of conflicts involving different vehicle types for all ML strategies were compared to the case of heterogeneous traffic. The results indicated that the rates of rear-end conflicts involving the same vehicle type as the lead and following vehicle, namely DV-DV and AV-AV conflicts, increased with ML implementation as more vehicles of the same type traveled in the same lane(s). By comparing the aggregated conflict rates, the design options that were deemed to negatively impact traffic efficiency and capacity were also found to negatively impact traffic safety. However, other ML options were found to be feasible in terms of traffic operation and safety performance, especially at traffic demand levels below capacity. Specifically, one left-side AVML with continuous access was found to have lower or comparable aggregated conflict rates compared to heterogenous traffic at 25% and 50% MARs, and, thus, it is expected to have positive or neutral safety impacts.
1. Introduction
It is anticipated that there will be a gradual shift from conventional, driver-operated vehicles (DVs) to automated vehicles (AVs) as they become available in the marketplace. However, it is uncertain as to when traffic composition will entail a 100% AV fleet [1]. Hence, DVs and AVs are expected to coexist on the road network for the time required for all new vehicle sales to only include AVs and the attrition of all DVs in the vehicle fleet [2]. This coexistence of AVs and DVs on the traffic network at the same time is referred to as a mixed-vehicle fleet or a mixed-traffic environment [3]. This mixed-vehicle environment with different vehicle operational characteristics could impede the full potential of AVs in reducing travel time and may impact the safety of freeways due to vehicle-to-vehicle interactions. Hence, researchers have often suggested using dedicated freeway lanes to accommodate these vehicle types during this transition phase [4,5].
Separating specific vehicles based on occupancy or type from the main traffic flow is already a common practice in demand management strategies to curb freeway congestion. One such policy is the use of managed lanes (MLs), which are defined as “dedicated lanes or roadways implemented on congested freeway corridors that are actively controlled through a variety of strategies to limit flow rates and thereby preserve an acceptable level of service” [6]. A similar demand management policy may limit vehicle-to-vehicle interactions during the early stages of AV introduction by designating dedicated lanes for specific vehicle types. One notable advantage of using this policy is that it has the flexibility to adjust the management approach over time due to growth and changes in technology adoption, leading to a continuous change in the AV market adoption rate, referred to in this study as the market adoption rate (MAR).
The principal management strategies used for MLs are categorized based on pricing, vehicle eligibility, and access control. Access to an ML can be restricted to specific locations on the freeway (restricted-access control) or may permit vehicles to enter at any location (continuous-access control) [7]. ML orientation is another essential consideration that requires the analysis of travel patterns and potential conflicts with ingress and egress ramps [8]. The most common practice is to position MLs at a freeway’s left side, alongside the median, to facilitate long-distance trips and fewer conflicts with traffic exiting and entering the freeway at ramps [9]. However, to consider the potential of servicing long- and short-distance trips, planning MLs to separate AVs and DVs should consider different strategies, utilizing left- and right-side ML orientations along with continuous and restricted access. Therefore, the objective of this paper is to assess the expected safety performance of MLs in a mixed AV-DV environment involving different strategies based on orientation, access control, and vehicle eligibility. These MLs will be referred to as AVMLs or DVMLs depending on whether the eligible vehicles are AVs or DVs, respectively. To cover the different stages of vehicle fleet transition from the current condition of an all-DV fleet (MAR = 0%) to a projected future condition of an all-AV fleet (MAR = 100%), the analysis was performed for three MARs, namely 25%, 50%, and 75%. The term AV in this paper refers to a vehicle where all driving tasks are executed by the automated driving systems while traveling on the freeway, which corresponds to automation level 3 (L3) in the Society of Automotive Engineers (SAEs) classification [10]. The results generated in this study can assist practitioners when deciding on whether to implement AVMLs/DVMLs as the MAR increases to manage vehicular traffic on the freeway.
2. Literature Review
2.1. Road Safety and Traffic Conflicts
Road safety performance is manifested through the occurrence of collisions and their consequences [11]. However, since collisions are rare and random events, collision frequencies at a specific location or segment typically exhibit significant fluctuations with time. Therefore, assessing the safety performance of a specific road segment or safety treatment should be based on the expected collision frequency, which may be estimated using the past collision history and statistical techniques [11]. However, relying on past collision experience to derive the expected collisions may not be optimal or even possible in short-term or real-time safety assessments and in assessing the safety impacts of new vehicle technologies; see for example [12,13,14]. For these applications, researchers have often relied on the concept of traffic conflicts to utilize surrogate safety measures.
Using traffic conflicts as a surrogate safety measure is based on the hypothesized relationship between traffic events, conflicts, and collisions. According to this relationship, known as the safety pyramid, a serious traffic conflict is an indicator of a breakdown in the interaction between two road users [12]. A conflict event is defined as “an observable situation in which two or more road users approach each other in space and time to such an extent that there is a risk of collision if their movements remain unchanged” [15]. Conceptually, reducing the extent of traffic conflicts should reduce the occurrence of more serious events involving traffic collisions. Time to collision (TTC) is a conflict-based surrogate safety measure that is generally perceived to be efficient and effective in evaluating traffic safety [16,17]. Also referred to as time measured to collision (TMTC), TTC has been defined as “the time required for two vehicles to collide if they continue at their present speeds and on the same path” [18]. Another surrogate measure that is often used in intersection assessments is the post-encroachment time (PET), defined as the “time lapse between end of encroachment of turning vehicle and the time that the through vehicle actually arrives at the potential point of collision” [19].
2.2. Safety of Mixed-Vehicle Environments
Multifaceted research efforts are required to ensure the safety of new vehicle technologies. Much of the literature has focused on issues related to the technology itself; see for example [20]. From the viewpoint of transportation engineering, the primary concern is the different operational characteristics of AVs compared to DVs, which can result in inconsistencies between AV and DV behaviors or between AV behavior and road elements. Therefore, several research efforts have addressed the expected safety performance of different road elements in mixed-vehicle environments. As these research efforts deal with futuristic traffic conditions, safety assessment has been based on different surrogate safety measures derived from analytical models, simulation-based algorithms, or traffic simulation [13,17,21,22]. On freeways, several studies used the combination of traffic simulation and surrogate safety assessment based on the two measures TTC and PET mentioned earlier to assess safety impacts of new vehicle technologies [23,24,25]. The results have consistently shown that the number of conflicts decreases as the percentage of AVs in the traffic composition increases from 0% to 100% or as the automation level of AVs increases. Another surrogate safety measure, called the probability of non-compliance (PNC), was also used to examine the relative safety performance of different merging management strategies at freeway entrance ramps [26]. The results showed that, although safety at freeway merge areas may deteriorate in a mixed-vehicle environment, specific merge management strategies can overcome this problem and improve safety.
Previous research in relation to MLs in a mixed-vehicle environment focused mainly on the mobility and traffic operational impacts, with less research assessing the safety impacts [5,27]. Thus, Abdel-Aty et al. [5] studied the safety and operational impacts of connected vehicles (CVs) on a twelve-lane freeway (six lanes in each direction) segment with four general-purpose lanes (GPLs) and two MLs. Six scenarios of connected vehicle (CV) lane configurations were examined under peak and off-peak conditions at different MARs, covering the full range from 0% to 100%. All scenarios were first simulated in PTV Vissim 11, and then a safety analysis was performed using the Surrogate Safety Assessment Model (SSAM, version 3) to extract the number of TTC conflicts. Overall, the results suggested that Cases 1 and 2 of lane configuration (where CVs were allowed in the two MLs or one of the two MLs was set exclusively to CVs) were recommended at MARs ranging from 10% to 30%. Case 3, where CVs were only allowed in one ML, was not recommended, as it did not reduce conflicts. At higher MARs, up to 60%, it was advised to convert one GPL to an ML and allow CVs in all three MLs. Similarly, Zhang et al. [27] examined the safety impacts of separate lanes for connected automated vehicles (CAVs) on a 7 km segment of a four-lane freeway (four lanes/direction). Traffic was simulated in PTV Vissim with an external Intelligent Driver Model (IDM) to control CAV platooning. SSAM was also used to process vehicle trajectories, and surrogate safety measures based on TTC and PET were extracted. The results also showed the potential safety benefits of separate CAV lanes in a mixed environment with an MAR greater than 15%.
From the literature, it is evident that there may be some safety benefits associated with the increased prevalence of AVs on freeways in a mixed-vehicle environment. Additionally, the adoption of ML strategies for vehicles with different driving capabilities might also yield safety benefits. However, there is little evidence of the safety benefits associated with utilizing different ML strategies for a vehicular fleet of AVs and DVs at various AV market adoption rates (MARs). Hence, this study attempts to contribute to research by examining the safety implications of various ML strategies in a mixed-vehicle environment.
3. Research Methodology
For a comprehensive assessment of the potential of MLs in improving traffic operation and safety in mixed-vehicle environments, Figure 1 shows a framework of the overall research methodology, starting with the definition of the general AV and DV attributes used in this study. Locally calibrated and validated driving behavior parameters for heavy vehicles (HVs) and passenger cars (PCs) were obtained from the literature [28,29,30,31,32]. AVs were assumed to follow the “normal logic”, which was detailed in [33], with the time headway adjusted to be as small as 0.5 s due to the AVs’ robotic capabilities. In addition, AVs’ deceleration was assumed to be 2.8 m/s2 to ensure passenger comfort [27]. Included in this step was also setting the MARs considered in this study. As mentioned earlier, three MAR values of 25%, 50%, and 75% were considered to account for low, medium, and high AV penetration rates and, thus, cover the whole transition stage from the current fleet, solely comprising DVs, to a future fleet of all AVs.
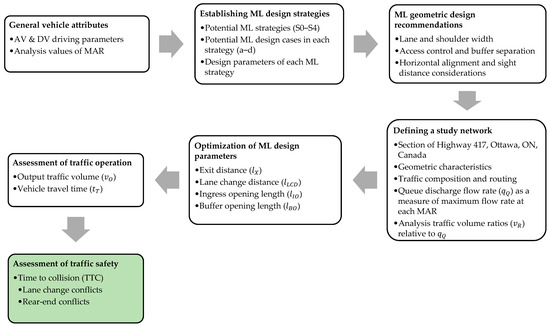
Figure 1.
Framework of overall research methodology.
Different ML strategies were then identified based on orientation, vehicle eligibility, and access control. These strategies are referred to as S1–S4, with different cases in each strategy, as explained in Section 3.1. Based on the AV characteristics, recommendations for the geometric design of the ML envelope for the different strategies were addressed in another study [34]. A study network was then identified on Highway 417, Ottawa, Ontario, as shown in Figure 2. Geometric and traffic characteristics of the study network were collected from different sources, as detailed in [3]. Because HVs made up only 5% of the traffic volume on the study network [3], all HVs were assumed to be driver-operated vehicles. Thus, the MAR was applied only to PCs that were then classified as AVs or DVs. The queue discharge flow rate () was estimated for this section at the different MARs as a measure of freeway capacity in heterogeneous traffic. The main design parameters of all proposed strategies and design options were then optimized following a process conducted using a traffic microsimulation, which was detailed in [35], as explained in Section 3.2. The optimized strategies could then be used for assessing traffic operation, as explained briefly also in Section 3.2, and safety performance, which is the focus of this paper.

Figure 2.
Study network (source: Google Maps) [3].
3.1. ML Design Strategies
As mentioned earlier, the proposed four ML strategies based on the ML orientation and access considerations, referred to as S1–S4, are schematically illustrated in Figure 3 in addition to a base strategy (S0) of heterogeneous traffic without MLs. For the easy identification of each strategy, the strategy number may be followed by two letters identifying the lane position (L = left or R = right) and access consideration (C = continuous or R = restricted). For example, S1(LC) indicates that strategy S1 involves a left-side ML with continuous access, as shown in Figure 3. In addition, each ML strategy has four possible design options or configurations depending on the number of MLs and MARs, resulting in sixteen ML cases. These design options are referred to as follows: (a) 1AVML25, involving one AVML at 25% MAR; (b) 1AVML50, for one AVML at 50% MAR; (c) 2AVML50, for two AVMLs at 50% MAR; and (d) 1DVML75, for one DVML at 75% MAR. Thus, the type of eligible ML vehicles switches from AVs to DVs at a high MAR of 75%. The ML design parameters that could impact traffic operation were first optimized for each strategy. These parameters are overlaid on each strategy in Figure 3 and defined as follows:
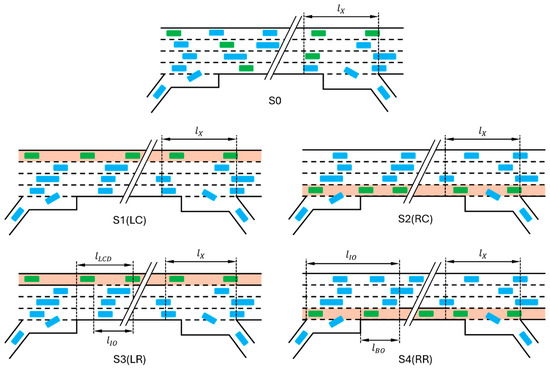
Figure 3.
Schematic of ML design strategies (adapted from [3]).
- Exit distance (): Distance upstream the exit ramp gore area measured from the point at which vehicles would attempt to seek an opportunity to change lanes to exit the freeway. This parameter is relevant in all strategies, including S0, and depends on the vehicle type and ML position if an ML is deployed.
- Lane change distance (): The distance required for the eligible on-ramp vehicles to merge onto the ML, measured from the end of the acceleration SCL to the end of the restricted-access opening section. This parameter is relevant for S3(LR).
- Ingress opening length (): The length of the actual ingress opening. This parameter is relevant for S3(LR) for all ML vehicles to merge onto ML and for S4(RR) to allow GPL vehicles from the on-ramp to merge onto the GPLs.
- Buffer opening length (): Distance downstream the end of the acceleration SCL to allow GPL vehicles from the on-ramp to merge onto GPLs. This parameter is relevant only for S4(RR).
In addition, AVs are designated as eligible ML vehicles during the low and medium MARs (25 and 50%), while DVs are the designated eligible ML vehicles in the case of a high MAR (75%). Thus, the term ML is used in this paper as a general term, regardless of the type of eligible vehicles, while AVML or DVML is used to identify the eligible ML vehicles as AVs or DVs, respectively.
3.2. Optimization of ML Strategies and Assessment of Operational Performance
An eastbound four-lane segment of Highway 417 in Ottawa, shown in Figure 2, was used as the study network, where all the aforementioned strategies were implemented in a traffic microsimulation in PTV Vissim 2023 by repurposing GPLs without requiring additional right-of-way. Three different levels of traffic demand were assumed using volume ratios () of 0.8, 1.0., and 1.2 relative to the estimated under S0 conditions. The design parameters were optimized by finding the values where the average vehicle travel time () did not depend on the values of these design parameters. A total of 3267 simulation runs, comprising 1089 simulation scenarios and 3 seed numbers for each simulation scenario, were performed in this step. Table A1 summarizes the vehicle parameters used in all simulations. The estimated values of are shown in Table A2, and the optimal values of the ML design parameters are summarized in Table A3.
The performance of the freeway’s traffic operation was evaluated for all ML design options relative to the performance of heterogeneous traffic (S0). Two performance measures were used in the assessment, namely output volume () as a measure of freeway capacity and as a measure of traffic flow efficiency. In addition, the analysis considered the performance of different vehicle types (DVs, AVs, and HVs) and different network routes (mainline, mainline to off-ramp, on-ramp to mainline, and on-ramp to off-ramp) to ensure design equity. That is, an optimal design should not unintentionally penalize a specific route or vehicle type. Considering four ML strategies, four cases of each strategy, and three MAR values (25, 50, and 75%) in S0, the traffic operation assessment involved nineteen different simulation scenarios under three different traffic demand levels for a total of fifty-seven different simulation scenarios. The results indicated that most ML design options experienced a drop in and an increase in relative to S0. Five options were identified to have the highest potential for use as AVML strategies without negatively impacting traffic flow, which are S1-4a(1AVML25) and S1b(LC-1AVML50).
3.3. Assessment of Safety Performance
This section details the process followed in this study to assess the expected safety performance of the four proposed ML strategies (S1–S4), relative to the case of heterogeneous traffic S0. Based on the discussions presented earlier, surrogate safety measures are the optimal measures for such an analysis of futuristic scenarios. Specifically, and consistently with previous research, this study used TTC as the surrogate safety measure to compare the expected safety performance of the different ML strategies and design options. The paper uses the Surrogate Safety Assessment Model (SSAM), developed by the Federal Highway Administration (FHWA), to analyze vehicle trajectories resulting from the traffic microsimulation to identify lane change and rear-end conflicts and estimate the TTC for each conflict [36].
3.3.1. TTC Measure and Conflict Types
In general, conflict events can result between crossing, following, and adjacent flows [19]. As the study network is a freeway segment with no at-grade intersections, conflicts in this study would only develop between following or adjacent flows. In the case of following flows, a sudden deceleration by a leading vehicle may require the following vehicle to slow down to avoid a rear-end collision. Also, if the lead vehicle abruptly shifts to an adjacent lane in front of another vehicle, the following vehicle may have to slow down to avoid a collision resulting from the lane change maneuver. Hence, the two types of conflicts identified in the different simulation scenarios in this study are rear-end (lead and following vehicles traveling in the same lane) and lane change (lead vehicle originally traveling in an adjacent lane). The seriousness of any conflict event can be assessed via different surrogate safety measures that can be quantified using SSAM, which is a software designed to execute statistical analysis using vehicle trajectories obtained from traffic microsimulation packages. This software identifies conflict events of various types (such as crossing, rear-end, and lane change), computes surrogate safety measures (such as TTC and PET) for each conflict event, and summarizes the results in a tabular format [36]. In general, smaller values of the surrogate safety measures indicate more severe conflicts and, in turn, greater chances of a collision.
For the lane change and rear-end conflict considered in this paper, TTC is a measure of conflict severity, where lower TTC values indicate a higher probability of collision, albeit it may not indicate collision severity [19]. In using TTC to assess safety performance, researchers (e.g., [5,24]) mostly used SSAM’s default threshold of 1.5 s, which was based mainly on the work by Horst [37,38]. However, given the reduced AV reaction time compared to DVs, lower TTC thresholds have been suggested for conflicts when the following vehicle is an AV. For example, Virdi et al. [39] used a 0.5 s TTC threshold, while Miqdady et al. [25] used a 0.75 s threshold when the following vehicle was an AV. Subsequently, similar to the approach by Miqdady et al. [25], this paper uses two different TTC thresholds (): (1) = 1.5 s, when the following vehicle is a DV or an HV, and (2) = 0.75 s when the following vehicle is an AV.
3.3.2. Extracting Conflict Events
The same 57 simulation scenarios analyzed for traffic performance, comprising 19 design options and 3 traffic demand levels, were also considered in the safety performance analysis. A total of 5 different simulation runs using different seed numbers were performed for each simulation scenario, for a total of 285 simulation runs. The vehicle trajectories of all simulation runs were fed to SSAM to identify the rear-end and lane change conflict events that developed in each run. The results of traffic conflicts in each simulation run were saved in a separate CSV file that identified each conflict event in the run, identified the lead and following vehicles involved in the conflict, and provided the conflict’s TTC value. The types of vehicles involved in the conflict were not directly identifiable but could be identified by matching the vehicle ID in SSAM’s output file with the Vissim’s vehicle ID output file. Therefore, a MATLAB script was created to open all 285 CSV files and the corresponding 285 Excel vehicle ID files, read each conflict event, identify the conflict type, TTC value, and the lead and following vehicle types, count the number of conflicts for a specific TTC threshold within the simulation hour following the initial 15 min simulation warm-up, determine the output volume traversing the study segment and crossing the detector downstream the off-ramp gore area, and calculate the rate of conflicts per vehicle volume.
For each simulation run, 18 different numbers of conflicts were extracted to correspond to 2 conflict types (rear-end or lane change) × 3 types of lead vehicle (DV, AV, or HV) × 3 types of following vehicle (DV, AV, or HV). In this paper, these conflicts are called individual vehicle interaction conflicts (or simply individual vehicle conflicts) and are referred to using the type of lead vehicle, the type of following vehicle, and the type of conflict. For example, DV-AV-RE refers to a rear-end conflict between a lead DV and a following AV. Three additional aggregated numbers of each conflict type were also recorded for the three types of following vehicles while combining all lead vehicles, referred to as vehicle type XV. Thus, XV-HV-LC, for example, refers to a lane change conflict with a lead vehicle of any type and a following HV. The final aggregated number of conflicts corresponded to all rear-end and all lane change conflicts, regardless of the type of lead or following vehicles. Using the same terminology of XV to refer to any vehicle type, these latter aggregated conflicts are referred to as XV-XV-RE and XV-XV-LC, respectively. In this paper, all conflicts involving XVs as the lead and/or following vehicles are called aggregated conflicts. Figure 4 illustrates all types of conflicts involving lead and following vehicles that were considered in the safety assessments in this study.
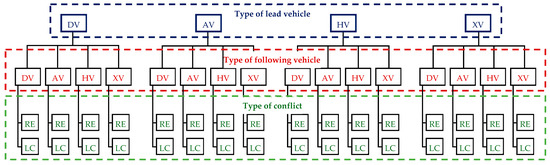
Figure 4.
Representation of all conflicts considered in the safety assessments.
3.3.3. Calculating Conflict Rates
Because vehicle volumes can differ between the different simulation scenarios, in addition to the obvious difference between the volumes of different vehicle types, the comparison of the expected safety performance in this paper was based on the rates of conflicts or the number of conflicts per relevant vehicle volume. Furthermore, the evasive action to avoid a collision in the two types of conflicts considered in this study, rear-end and lane change, was performed by the following vehicle. Therefore, the conflict rate was calculated, and the TTC threshold was set based on the type of following vehicle. Thus, the conflict rate for any conflict category was calculated by dividing the number of conflicts by the hourly volume of the following vehicle type, as shown in Equation (1).
where = conflict rate of type , involving lead vehicle type and following vehicle type ; = number of conflicts of the same type and involving the same lead and following vehicle types; = vehicle volume of the following vehicle type; ∈ [RE, LC]; and and ∈ [DV, AV, HV, XV].
4. Results and Discussion
This section compares the conflict rates for the different ML strategies and design options against heterogeneous traffic (S0) at the same MAR. The comparison is performed for conflicts of both types (rear-end and lane change) and involving the individual vehicle and aggregated conflicts as per the representation shown in Figure 4. The last subsection in this discussion focuses on the five design options that were identified as viable ML design options based on traffic operation considerations [3]. It should be noted that the comparisons of safety performance in this study are qualitative and based on mean conflict rates, where each mean value is calculated using the results of five simulation runs. The statistical significance of the differences noted between conflict rates for an ML design option and the case of heterogenous traffic at the same MAR was also assessed using a series of two-sample t-tests. Table 1 summarizes the percentage of ML design options that were significantly different from S0 at a 5% level of significance for each conflict type, vehicle interaction, and traffic demand level. For easy visualization, each cell has a background color, where green cells indicate a percentage greater than 50% and the darker the color the higher the percentage. On the other hand, blue cells indicate a percentage less than 50% and the darker the color the lower the percentage. For example, the 62.5% value in the cell corresponding to DV-DV-RE and = 0.8 indicates that the mean DV-DV-RE conflict rate of 62.5% of all ML design options at this volume ratio was statistically different from the case of heterogeneous traffic. The table indicates that differences between all ML design options and S0 are mostly significant, except for conflicts involving HVs, especially for lane change conflicts.

Table 1.
Percentage of ML design options significantly different from S0.
4.1. Comparing Rear-End Conflicts of All Design Options
First, Figure 5 summarizes the rates of aggregated rear-end conflicts for each following vehicle type, while Figure A1, Figure A2 and Figure A3 in Appendix A summarize the individual vehicle rear-end conflict rates for each combination of lead and following vehicle types. For the easy comparison of all strategies and design options, the y-axis in these figures is scaled based on the maximum rate in each column of subplots in each figure. As mentioned previously, the conflict rates presented in these figures use different TTC threshold () values based on the type of following vehicle. First, Figure 5 shows that the aggregated conflict rates are fairly low for S0, with a trend of slight increase as increases. The highest aggregated conflict rates are XV-DV-RE (the following vehicle is a DV) even at the high MAR of 75%, where DVs make up only 25% of all PCs in the network. This can be attributed to the higher TTC threshold () for DVs ( = 1.5 s) compared to AVs ( = 0.75 s), causing all events with a TTC in the range of 0.75 to 1.5 s to be excluded from the conflict count when the following vehicle is an AV but included when the following vehicle is a DV. In addition, as the MAR increases, both the number of XV-DV-RE and the DV volume decrease, with a net result of relatively high conflict rates.
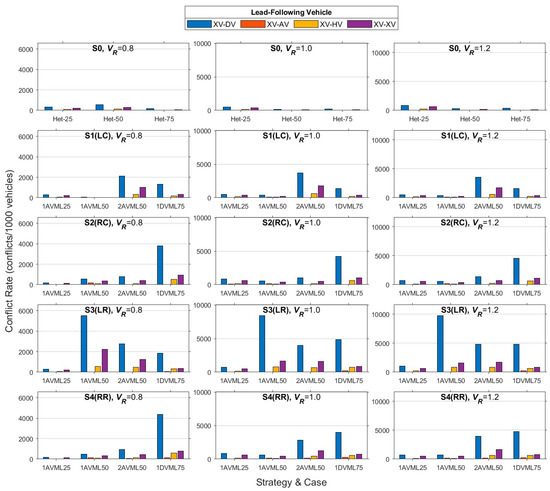
Figure 5.
Rates of aggregated rear-end conflicts for all ML strategies.
The same trend can be observed in the individual vehicle conflicts when breaking down the conflicts by the lead vehicle type, as shown in Figure A1, Figure A2 and Figure A3. These figures also show that, in examining each type of following vehicle, the highest individual vehicle conflict rates are DV-DV-RE, AV-AV-RE, and DV-HV-RE. In addition, for the two continuous-access strategies (S1 and S2), the AV-AV-RE conflict rates are highest in Case b(1AVML50), which could have resulted from having 50% of all AVs traveling in one lane. This trend also causes the DV-DV-RE conflict rates to be lowest for these two design options. Notably, S3b(LR-1AVML50) has a considerably lower AV-AV-RE conflict rate than the same option in strategies S1 and S2, which is likely caused by the inability of some AVs to merge onto the AVML within the ingress area in S3(LR). On the other hand, for the two restricted-access strategies (S3 and S4), the AV-AV-RE conflict rates are highest in Case d(1DVML75), which is associated with the highest number of AVs in the vehicle fleet.
Figure 5 also shows that Case a(1AVML25) in all strategies (S1–S4) has comparable aggregated conflict rates to S0, indicating that all ML strategies do not cause a considerable increase in this conflict type at a 25% MAR compared to heterogeneous traffic. Additionally, Figure A1, Figure A2 and Figure A3 also illustrate that ML strategies are associated with increased rates of conflicts involving the same vehicle type as the lead and following vehicle (i.e., AV-AV and DV-DV). Such a trend is intuitive since ML implementation would cause more vehicles of the same type to travel in the same lane(s), thus increasing the potential for conflicts involving a pair of vehicles of the same type. Similarly, increasing the number of DVs in the GPLs, where HVs travel, causes an increase in DV-HV conflicts.
As the MAR increases to 50%, Case b(1AVML50) still shows low aggregated conflict rates in S1(LC), S2(RC), and S4(RR), while Case c(2AVML50) shows low aggregated conflict rates only in S2(RC). These four design options are comparable to, albeit higher than, the corresponding heterogeneous traffic case S0(Het-50). Other trends related to the increase in conflicts AV-AV, DV-DV, and DV-HV are also valid for all these design options. The remaining design options experience a considerable increase in the conflict rates. For example, S3b(LR-1AVML50) shows considerably higher rates of all conflicts involving DV and HV as the following vehicle type. At a 75% MAR, only the design option S1d(LC-1DVML75) is comparable to the corresponding heterogeneous traffic case S0(Heterogenous MAR at 75%), while the remaining options cause an increase in the conflict rates.
4.2. Comparing Lane Change Conflicts of All Design Options
First, Figure 6 summarizes the rates of aggregated lane change conflicts for each following vehicle type, while Figure A4, Figure A5 and Figure A6 in Appendix A summarize the individual vehicle lane change conflict rates for each combination of lead and following vehicle types. As mentioned previously and similar to rear-end conflicts, the conflict rates presented in these figures use different TTC threshold () values based on the type of following vehicle. First, Figure 6 shows that the aggregated conflict rates in heterogeneous traffic (S0) increase with the increase in . This can be explained by increasing traffic volumes and congestion prompting more vehicles to try to change lanes in an attempt to reduce their travel time. The figure also shows that the XV-DV-LC conflicts (where the following vehicle is DV) generally experience the highest conflict rates. As shown in Figure A4, these high XV-DV-LC conflict rates are caused mainly by high DV-DV-LC conflict rates. Figure A4 also shows that, as the MAR increases, the dominant lead vehicle type in these conflicts changes from DVs at a 25% MAR to AVs at a 75% MAR, which is expected, since the majority of the vehicular fleet is made up of AVs. Figure 6 also shows that the ML design options generally reduce the aggregated lane change conflict rates. The notable exceptions are Case c(2AVML50) in all strategies except for S2(RC) and all cases in S3(LR) except for S3d(LR-1DVML75). Figure A5 also shows that Cases c(2AVML50) and d(1DVML75) in all strategies S1-S4 increase AV-AV-LC conflict rates. Finally, as indicated earlier in Table 1, compared to heterogeneous traffic (S0), most design options did not produce significantly different lane change conflict rates involving HV as the following vehicle.
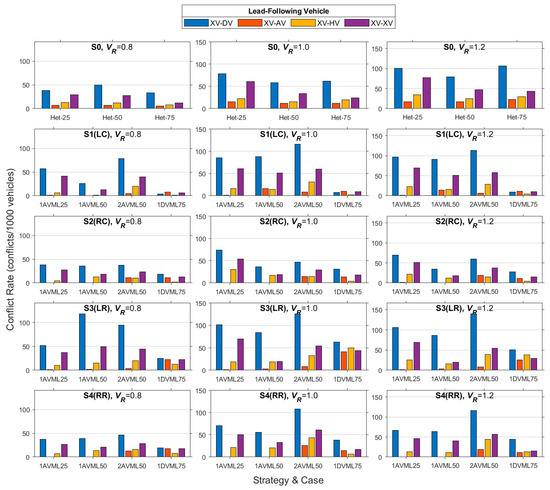
Figure 6.
Rates of aggregated lane change conflicts for all ML strategies.
4.3. Comparing Select Design Options
As mentioned earlier, five specific ML design options were deemed feasible based on the traffic operational performance assessed using network output volumes and average vehicle travel times [3]. Four of these options corresponded to a 25% MAR; these were Case a(1AVML25) in all strategies (S1–S4), while only one option corresponded to a 50% MAR, namely S1b(LC-1AVML50). This subsection examines closely these five options relative to the heterogeneous traffic conditions at the corresponding MARs. Therefore, Figure 7 summarizes the aggregated conflict rates for these five options along with the heterogeneous traffic conditions S0(Het-25) and S0(Het-50). For brevity, in the figures, these two heterogeneous conditions are shown as Cases S0a and S0b, respectively. Figure 8 and Figure 9 summarize the individual vehicle conflicts for the considered options for rear-end and lane change, respectively. Table 2 summarizes the p-values for the two-sample t-tests to compare the rate of each conflict type in each ML design option against the corresponding heterogenous traffic case at the same MAR and values. Cells with a p-value less than 0.05 are highlighted to indicate a statistically significant difference at a 5% level of significance.
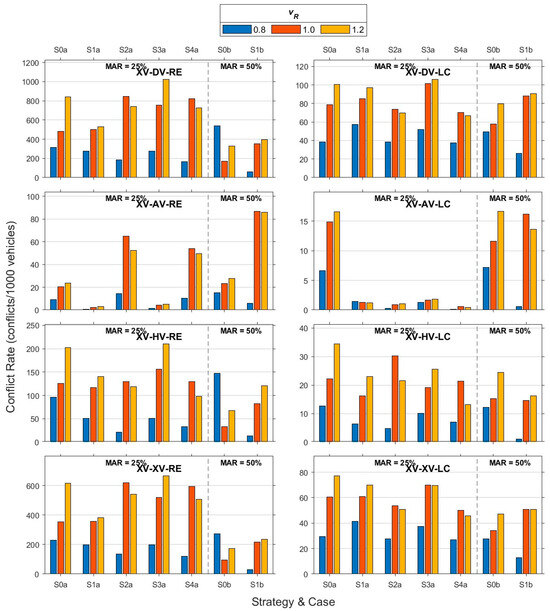
Figure 7.
Rates of aggregated conflicts for select ML design options.
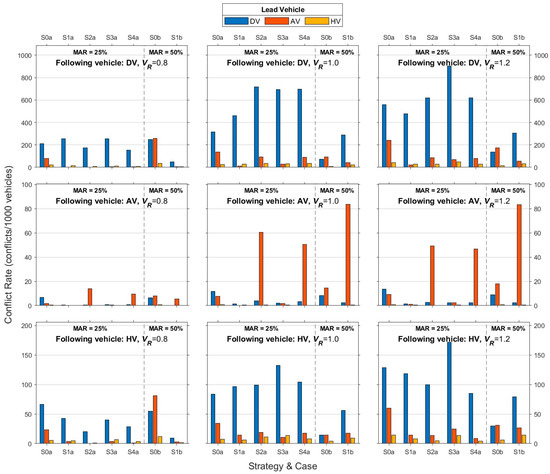
Figure 8.
Rates of individual vehicle rear-end conflicts.
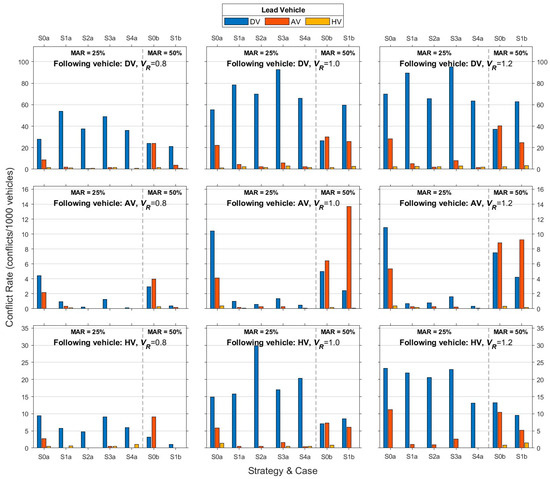
Figure 9.
Rates of individual vehicle lane change conflicts.
Table 2.
Summary of p-values of two-sample t-tests for select ML options.
Figure 7, Figure 8 and Figure 9 confirm the trends previously observed when comparing all strategies. Specifically, XV-DV exhibits the highest aggregated rear-end and lane change conflict rates. These higher rates result mainly from high DV-DV conflict rates, which could be due to the higher TTC threshold value. The figures also show that, when the following vehicle is an AV, the highest rear-end conflict rates are AV-AV-RE. However, for the lane change conflicts, Case a(1AVML25) in all strategies has DV-AV-LC conflict rates higher than those for AV-AV-LC. This trend deviates from the general trend in Figure A5, where the AV-AV-LC conflict rates are generally higher than those for DV-AV-LC. The figures also show different trends in relation to the change in conflict rate with ML deployment relative to S0. First, at the low traffic demand level ( = 0.8), the aggregated XV-XV-RE conflict rates are lower for all five ML options than for the case of heterogenous traffic. As the traffic demand level approaches or exceeds capacity ( = 1.0 and 1.2), the aggregated rear-end conflict rates may increase for some options. Still, S1a(LC-1AVML25) experiences lower aggregated rear-end conflict rates of all types than S0. However, as shown in Table 2, the differences in the rear-end conflict rates are mostly insignificant for conflicts involving only DVs and HVs, while the differences are mostly significant for conflicts involving AVs as the lead or following vehicles. For the overall aggregation (XV-XV-RE), only 33% of all comparisons at 25% MAR returned statistically significant differences from the case of heterogeneous traffic. For the only ML option at a 50% MAR, which is S1b(LC-1AVML50), the rear-end conflict rates are generally lower than those for heterogenous traffic at the low traffic demand level ( = 0.8) but mostly higher at the higher demand levels ( = 1.0 and 1.2). As shown in Table 2, most of these differences are statistically significant. This result could be due to the increase in traffic turbulence generated by the number of AVs on the freeway as they seek an opportunity to enter the left-side ML at higher demand levels.
For the lane change conflicts shown in Figure 7 and Figure 9, the aggregated rates at the low demand level ( = 0.8) are lower than in S0 only for S2a(RC-1AVML25), S4a(RR-1AVML25), and S1b(LC-1AVML50), and the differences are mostly significant for conflicts involving AVs. This trend suggests that deploying AVML at a low traffic demand level can reduce potential collisions at MARs of 25% and 50%. As the traffic demand level approaches or exceeds capacity ( = 1.0 and 1.2), the aggregated lane change conflict rates may increase for some options, similar to the trend of rear-end conflicts. S1a(LC-1AVML25), which was shown to have lower aggregated rear-end conflict rates, has comparable aggregated lane change conflict rates to S0, where the differences in the XV-XV-LC conflict rates are statistically insignificant. At the 50% MAR, S1b(LC-1AVML50) has significantly lower aggregated lane change conflict rates at = 0.8, significantly higher rates at = 1.0, and comparable rates that are not significantly different at = 1.2. Similar to rear-end conflicts, an increase in conflicts is expected at higher values since the higher vehicular volume on the network would generate more turbulence in the traffic stream as vehicles attempt to change lanes to enter or exit the ML or freeway. It is evident that there is a reduction in the number of rear-end and lane change conflicts at MARs of 25% and 50% in most cases when S1(LC) is adopted. Hence, there is a possibility that, by implementing this type of ML at these MARs, traffic collisions could be reduced, which would, in turn, improve safety for all road users during this transition phase.
5. Conclusions
A comprehensive study was performed to optimize managed lane (ML) design strategies for automated vehicles (AVs) as the adoption of AVs gradually increases and to investigate freeway traffic operational and safety performance under these strategies. Since the proposed MLs would accommodate long- and short-distance travel, different strategies were proposed considering left- and right-side ML orientations as well as continuous and restricted access. As a result, four ML design strategies, referred to as S1–S4, were proposed, based on ML orientation and access considerations, in addition to the case of heterogeneous traffic with no ML, referred to as S0. This study also considered AV market adoption rates (MARs) of 25%, 50%, and 75% to account for the expected increase in the MARs with time.
The scope of this paper involved conducting a safety assessment using a surrogate safety measure, time to collision (TTC), for rear-end and lane change conflicts. This study utilized a combination of traffic microsimulation using PTV Vissim and conflict analysis using SSAM to calculate the rates of individual conflict interactions involving each type of vehicle as the lead and following vehicles as well as the aggregated conflict rates. The TTC threshold below which a vehicle interaction was considered a serious conflict depended on the type of following vehicle. Similar to the approach suggested in the literature [25,39], a lower TTC threshold was used for conflicts where the type of following vehicle was an AV compared to conflicts with DVs or HVs as the following vehicles. This lower threshold accounted for the AVs’ reduced reaction time compared to DVs, which makes them able to safely travel at lower headways. The performance of each design option was then compared to the case of heterogeneous traffic based on aggregated and individual vehicle conflict rates. The analysis first reviewed the performance of all 16 ML design options proposed considering three different MARs and at three different traffic demand levels. The general trends indicated that some ML strategies could lead to a considerable increase in conflicts, especially rear-end conflicts DV-DV-RE, AV-AV-RE, and DV-HV-RE. Such an increase was expected as the deployment of said strategies would cause more vehicles of the same type to travel in the same lane(s), especially for AVs at a 50% MAR and one AVML. Based on the aggregated conflict rates, many ML design options were found to negatively impact traffic safety, which highlights the importance of carefully considering ML impacts on traffic operation and safety in mixed-vehicle environments.
A more focused comparison considered five ML design options that were deemed feasible based on traffic operational performance. These options were all four strategies at a 25% MAR and S1b(LC-1AVML50) at a 50% MAR. The comparison indicated that all five design options yielded lower aggregated conflict rates than the heterogeneous traffic scenario at the low traffic demand level. As traffic demand approached or exceeded capacity, some options experienced an increase in conflict rates, although conflicts involving only DVs and HVs were not significantly different from the case of heterogenous traffic. Still, S1(LC) produced mostly lower or comparable aggregated conflict rates compared to heterogeneous traffic at 25% and 50% MARs. Therefore, this study confirmed the conclusion of the feasibility of ML deployment in this MAR range, with the option of one left-side AVML and continuous access being the most preferred option.
Although the findings of this study are numerous, it has certain limitations and may have policy implications. Future studies can address issues such as the variability in the driving behavior of AVs and the impact of selecting an ML strategy. Finer MAR increments may also provide more insights on the comparative traffic and safety performance on freeways with and without MLs. A safety model can be established when data are available for these vehicle types to relate collision frequency to the number or rate of conflicts. The implementation of an ML involves a detailed planning process, which includes identifying the benefits associated with adopting a specific ML strategy. Although this research identifies possible safety benefits associated with adopting a certain ML design strategy, other configurations and vehicle eligibility requirements could be explored, such as allowing ML-eligible vehicles to travel in GPLs if the ML is congested.
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: J.M.S. and Y.H.; simulation and data collection: J.M.S.; analysis and interpretation of results: J.M.S. and Y.H.; draft manuscript preparation: J.M.S. and Y.H. All authors have read and agreed to the published version of the manuscript.
Funding
Financial support by the Natural Research and Engineering Council (NSERC) of Canada is greatly appreciated.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AV | Automated vehicle |
| AVML | AV managed lane |
| CAV | Connected, automated vehicle |
| CV | Connected vehicle |
| DV | Driver-operated vehicle |
| DVML | DV managed lane |
| GPL | General purpose lane |
| HV | Heavy vehicle |
| Buffer opening length | |
| Ingress opening length | |
| Lane change distance | |
| Exit distance | |
| MAR | AV market adoption rate |
| ML | Managed lane |
| PC | Passenger car |
| PET | Post-encroachment time |
| Queue discharge flow rate | |
| SSAM | Surrogate Safety Assessment Model |
| TTC threshold for serious conflicts | |
| Average vehicle travel time | |
| TTC | Time to collision |
| Network’s output traffic volume | |
| XV | Vehicle of any type |
Appendix A. Additional Materials
Table A1.
Driver and vehicle behavior parameters (Adapted from [3]).
Table A1.
Driver and vehicle behavior parameters (Adapted from [3]).
| Model Parameters | AVs | DVs | HVs |
|---|---|---|---|
| (a) Car-Following Behavior Parameters and Values | |||
| Standstill distance (m) (CC0) | 1.0 | 1.0 | 3.91 † & 3.32 ‡ |
| Headway Time distribution (s) (CC1) | 0.5 | 0.75 | 2.75 † & 2.71 ‡ |
| Following distance oscillation (m) (CC2) | 0.0 | 3.0 | 4.0 |
| Threshold for entering following (CC3) | −8.0 | −8.0 | −8.0 |
| Negative speed difference (CC4) | −0.1 | −0.3 | −0.35 |
| Positive speed difference (CC5) | 0.1 | 0.3 | 0.35 |
| Distance dependency of oscillation (CC6) | 0.0 | 11.4 | 11.44 |
| Oscillation acceleration (m/s2) (CC7) | 0.1 | 0.25 | 0.25 |
| Acceleration at standstill (m/s2) (CC8) | 3.5 | 3.5 | 3.50 |
| Acceleration at 80 km/h (m/s2) (CC9) | 1.5 | 1.5 | 1.50 |
| (b) Lane Change Behavior Parameters and Values | |||
| Mandatory lane change maximum deceleration of own vehicle (m/s2) | −4.0 | −4.0 | −4.0 |
| Mandatory lane change maximum deceleration trailing vehicle (m/s2) | −3.0 | −3.0 | −3.0 |
| Mandatory lane change accepted deceleration for own vehicle (m/s2) | −1.0 | −1.0 | −1.0 |
| Mandatory lane change accepted deceleration for trailing vehicle (m/s2) | −1.0 | −0.5 | −0.50 |
| Safety distance reduction factor | 0.60 | 0.60 | 0.60 |
† Lead-following vehicles = PC-HV; ‡ Lead-following vehicles = HV-HV.
Table A2.
Queue discharge flow rate at different MARs (Adapted from [3]).
Table A2.
Queue discharge flow rate at different MARs (Adapted from [3]).
| MAR (%) | (veh/h/lane) |
|---|---|
| 0 | 2012 |
| 25 | 2232 |
| 50 | 2312 |
| 75 | 2441 |
Table A3.
Summary of optimal ML design parameters (Adapted from [3]).
Table A3.
Summary of optimal ML design parameters (Adapted from [3]).
| ML Case | (m) | (m) | (m) | (m) | ||||
|---|---|---|---|---|---|---|---|---|
| S0 | S1 and S3 (Left Side) | S2 and S4 (Right Side) | ||||||
| AV/DV | AV | DV | AV | DV | S3 | S3 | S4 | |
| 1AVML25 | 600 | 950 | 1000 | NA ‡ | 900 | 800 | 400 | 600 |
| 1AVML50 | 750 † | 750 | 800 | NA ‡ | 900 | |||
| 2AVML50 | 900 | 500 | 300 § | 700 | ||||
| 1DVML75 | 800 | 400 | 500 | 300 | NA ‡ | 550 | ||
† MAR is the same in these two cases, and the number of MLs is not a parameter in S0. ‡ is not required for eligible ML vehicles traveling in the right-most lane. § is required for ML AVs to allow AVs in the second lane to exit.
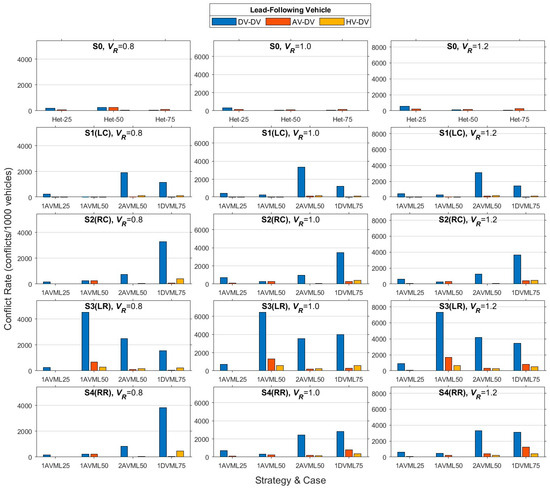
Figure A1.
Rates of individual vehicle rear-end conflicts (following vehicle = DV, = 1.5 s).
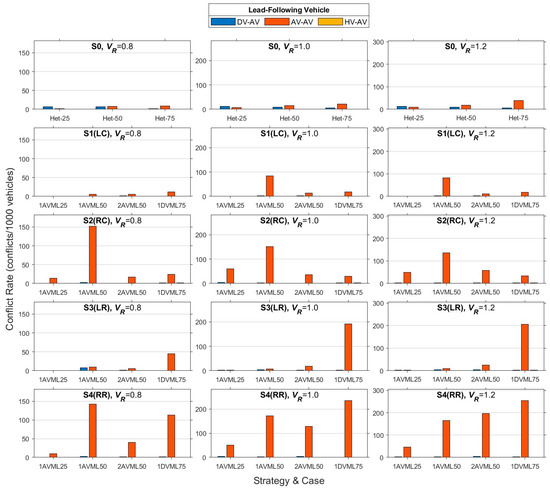
Figure A2.
Rates of individual vehicle rear-end conflicts (following vehicle = AV, = 0.75 s).
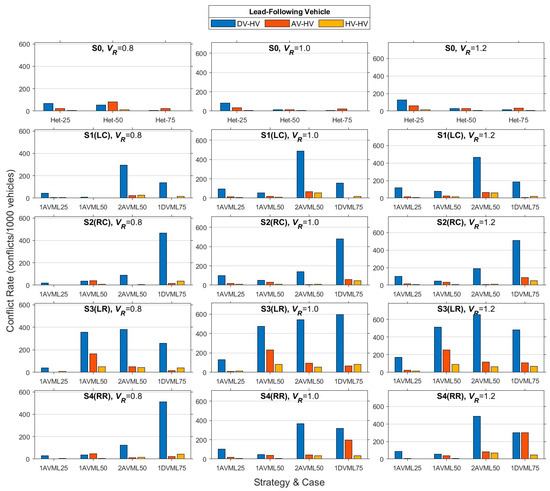
Figure A3.
Rates of individual vehicle rear-end conflicts (following vehicle = HV, = 1.5 s).
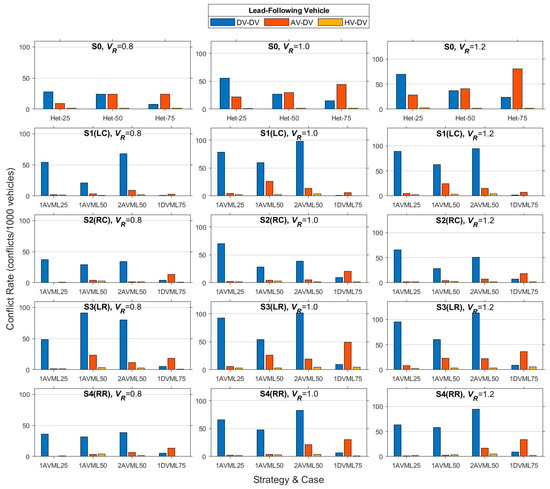
Figure A4.
Rates of individual vehicle lane change conflicts (following vehicle = DV, = 1.5 s).
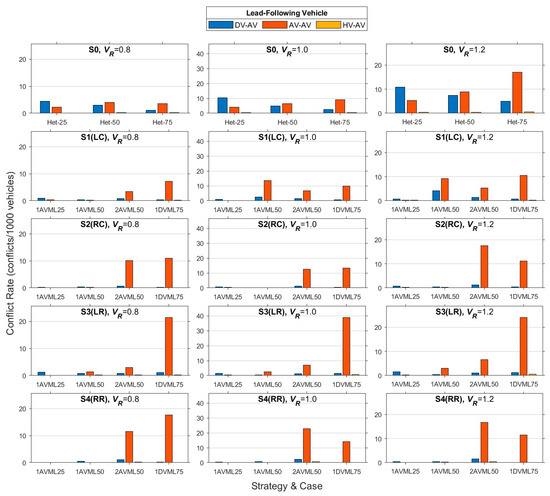
Figure A5.
Rates of individual vehicle lane change conflicts (following vehicle = AV, = 0.75 s).
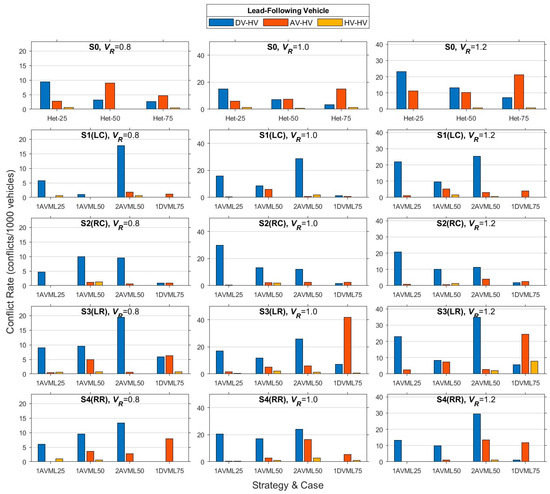
Figure A6.
Rates of individual vehicle lane change conflicts (following vehicle = HV, = 1.5 s).
References
- Tillema, T.; Gelauff, G.; Waard, J.; Berveling, J.; Moorman, S. Paths to a Self-Driving Future: Five Transition Steps Identified; Netherlands Institute for Transport Policy Analysis: Hague, The Netherlands, 2017. [Google Scholar]
- Somers, A. Future Vehicles Forecasts Update 2031; Austroads: Sydney, Australia, 2021. [Google Scholar]
- Sarran, J.M. Design and Performance of Managed Lanes in a Mixed Driver-Operated and Autonomous Vehicle Environment; Carleton University: Ottawa, ON, Canada, 2023. [Google Scholar]
- Calvert, S.C.; Schakel, W.J.; van Lint, J.W.C. Will Automated Vehicles Negatively Impact Traffic Flow? J. Adv. Transp. 2017, 2017, 3082781. [Google Scholar] [CrossRef]
- Abdel-Aty, M.; Wu, Y.; Saad, M.; Rahman, M.S. Safety and Operational Impact of Connected Vehicles’ Lane Configuration on Freeway Facilities with Managed Lanes. Accid. Anal. Prev. 2020, 144, 105616. [Google Scholar] [CrossRef] [PubMed]
- Fitzpatrick, K.; Brewer, M.; Chrysler, S.; Wood, N.; Kuhn, B.; Goodin, G.; Fuhs, C.; Ungemah, D.; Perez, B.; Dewey, V.; et al. Guidelines for Implementing Managed Lanes; National Cooperative Highway Research Program (NCHRP): Washington, DC, USA, 2016; Volume 835.
- FHWA. Managed Lanes: A Primer; Federal Highway Administration: Washington, DC, USA, 2005.
- JACOBS. Managed Lanes and Ramp Metering Manual-Part 3: Design Manual; JACOBS: Christchurch, New Zealand, 2013. [Google Scholar]
- Neudoroff, L.G.; Randall, J.E.; Reiss, R.; Gordon, R. Freeway Management and Operations Handbook; Federal Highway Administration: Washington, DC, USA, 2006. [Google Scholar]
- SAE. SAE J3016-Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; Society for Automotive Engineers: Warrendale, PA, USA, 2021. [Google Scholar]
- Hauer, E. Observational before/after Studies in Road Safety, 2nd ed.; Pergamon: Oxford, UK, 2002. [Google Scholar]
- Hydén, C. The Development of a Method for Traffic Safety Evaluation: The Swedish Traffic Conflicts Technique; Lund Institute of Technology, Department of Traffic Planning and Engineering: Lund, Sweden, 1987. [Google Scholar]
- Essa, M.; Sayed, T. Comparison between Surrogate Safety Assessment Model and Real-Time Safety Models in Predicting Field-Measured Conflicts at Signalized Intersections. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 100–112. [Google Scholar] [CrossRef]
- Chen, K.; Xu, C.; Liu, P.; Li, Z.; Wang, Y. Evaluating the Performance of Traffic Conflict Measures in Real-Time Crash Risk Prediction Using Pre-Crash Vehicle Trajectories. Accid. Anal. Prev. 2024, 203, 107640. [Google Scholar] [CrossRef] [PubMed]
- Amundsen, F.H.; Hydén, C. Proceedings: First Workshop on Traffic Conflicts; ICTCT: Oslo, Norway, 1977. [Google Scholar]
- Dijkstra, A.; Marchesini, P.; Bijleveld, F.; Kars, V.; Drolenga, H.; van Maarseveen, M. Do Calculated Conflicts in Microsimulation Model Predict Number of Crashes? Transp. Res. Rec. J. Transp. Res. Board 2010, 2147, 105–112. [Google Scholar] [CrossRef]
- Hou, J.; List, G.F.; Guo, X. New Algorithms for Computing the Time-to-Collision in Freeway Traffic Simulation Models. Comput. Intell. Neurosci. 2014, 2014, 761047. [Google Scholar] [CrossRef] [PubMed]
- Hayward, J. Near miss determination through use of a scale of danger. Highw. Resreach Rec. 1972, 384, 24–35. [Google Scholar]
- Gettman, D.; Head, L. Surrogate Safety Measures from Traffic Simulation Models Final Report; Federal Highway Administration: Springfield, VA, USA, 2003.
- Xiao, S.; Ge, X.; Han, Q.-L.; Zhang, Y. Secure and Collision-Free Multi-Platoon Control of Automated Vehicles Under Data Falsification Attacks. Automatica 2022, 145, 110531. [Google Scholar] [CrossRef]
- Fyfe, M.R.W. Safety Evaluation of Connected Vehicle Applications Using; The University of British Columbia: Vancouver, BC, Canada, 2016. [Google Scholar]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the Safety Impact of Autonomous Vehicles Using Simulation-Based Surrogate Safety Measures. J. Adv. Transp. 2018, 2018, 6135183. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the Safety Impact of Connected and Autonomous Vehicles on Motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef] [PubMed]
- El-Hansali, Y.; Farrag, S.; Yasar, A.; Shakshuki, E.; Al-Abri, K. Using Surrogate Measures to Evaluate the Safety of Autonomous Vehicles. Procedia Comput. Sci. 2021, 191, 151–159. [Google Scholar] [CrossRef]
- Miqdady, T.; de Oña, R.; Casas, J.; de Oña, J. Studying Traffic Safety During the Transition Period Between Manual Driving and Autonomous Driving: A Simulation-Based Approach. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6690–6710. [Google Scholar] [CrossRef]
- Pakzadnia, A.; Hassan, Y. Expected Safety Performance of Different Freeway Merging Strategies in an Environment of Mixed Vehicle Technologies. J. Transp. Eng. Part A Syst. 2023, 149, 04022143. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, K.; Cheng, M.; Yang, M.; Cheng, Y.; Li, S. Safety Evaluation for Connected and Autonomous Vehicles’ Exclusive Lanes considering Penetrate Ratios and Impact of Trucks Using Surrogate Safety Measures. J. Adv. Transp. 2020, 2020, 5847814. [Google Scholar] [CrossRef]
- AECOM. WisDOT Vissim Vehicle Fleet Study, Middleton, Wisconsin; AECOM: Dallas, TX, USA, 2020. [Google Scholar]
- Gauthier, N.L.; Le Digabel Saunier, S.; Cao, G. Calibration of Driving Behavior Models using Derivative-Free Optimization and Video Data for Montreal Highways. In Transportation Research Board, 95th Annual Meeting; National Academies: Washington, DC, USA, 2016. [Google Scholar]
- Houchin, A.; Dong, J.; Hawkins, N.; Knickerbocker, S. Measurement and Analysis of Heterogeneous Vehicle Following Behavior on Urban Freeways: Time Headways and Standstill Distances. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Proceedings, Gran Canaria, Spain, 15–18 September 2015; pp. 888–893. [Google Scholar]
- Lei, Q. Semi-Automated Microscopic Traffic Flow Simulation Development Using Smart City Data; University of Waterloo: Waterloo, ON, Canada, 2021. [Google Scholar]
- Pakzadnia, A.; Roustom, S.; Hassan, Y. Accommodation of Freeway Merging in a Mixed Traffic Environment Including Connected Autonomous Vehicles. Can. J. Civ. Eng. 2022, 49, 357–367. [Google Scholar] [CrossRef]
- Sukennik, P.; Kautzsch, L. Deliverable 2.3: Default Behavioural Parameter Sets for Automated Vehicles (AVs); Wiley: Hoboken, NJ, USA, 2018. [Google Scholar]
- Sarran, J.M.; Hassan, Y. Geometric Design of Envelope of Managed Lanes for Autonomous Vehicles. In Proceedings of the 6th International Symposium on Highway Geometric Design, Amsterdam, The Netherlands, 26–29 June 2022. [Google Scholar]
- Sarran, J.M.; Hassan, Y. Assessment of Automated Vehicles’ Freeway Exit Distances in Mixed and Managed Lane Traffic Environments. Can. J. Civ. Eng. 2024, 4. [Google Scholar] [CrossRef]
- Pu, L.; Joshi, R. Surrogate Safety Assessment Model (SSAM)-Software User Manual (Report FHWA-HRT-08-050); Federal Highway Administration: McLean, VA, USA, 2008.
- Horst, R.V.D. A Time-Based Analysis of Road User Behaviour in Normal and Critical Encounters; Delft University of Technology: Delft, The Netherlands, 1991. [Google Scholar]
- Horst, R.v.d. Time-to-Collision as a Cue for Decision-Making in Braking. In Vision in vehicles–III; Elsevier: Amsterdam, The Netherlands, 1991. [Google Scholar]
- Virdi, N.; Grzybowska, H.; Waller, S.T.; Dixit, V. A Safety Assessment of Mixed Fleets with Connected and Autonomous Vehicles Using the Surrogate Safety Assessment Module. Accid. Anal. Prev. 2019, 131, 95–111. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).