Simulation Models of Skidder Conventional and Hybrid Drive


 ,
,  , ,
, ,  and
and
Abstract
1. Introduction
2. Skidder Simulation Models
2.1. Conventional Skidder Model
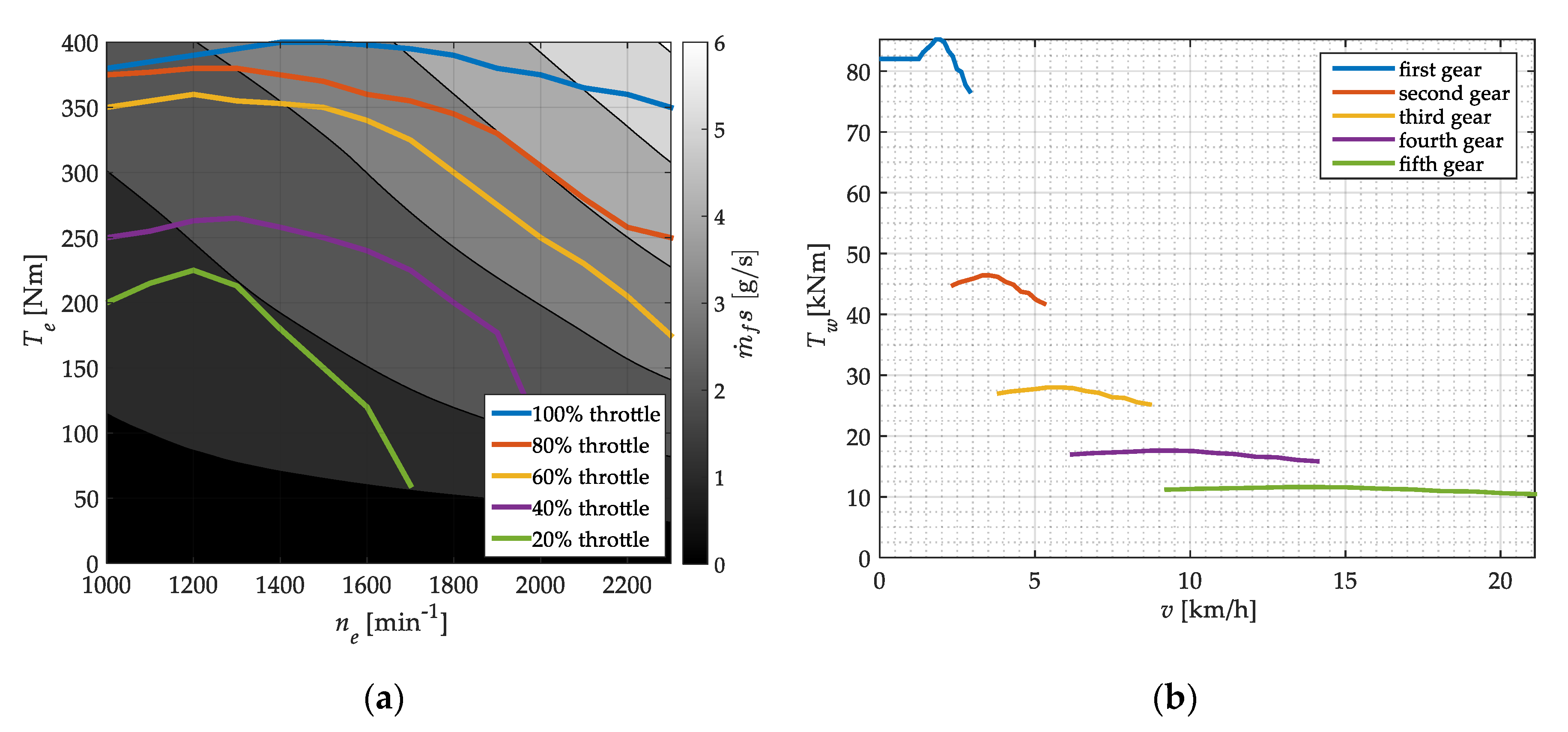
2.1.1. Engine and Gearbox Model
2.1.2. Winch
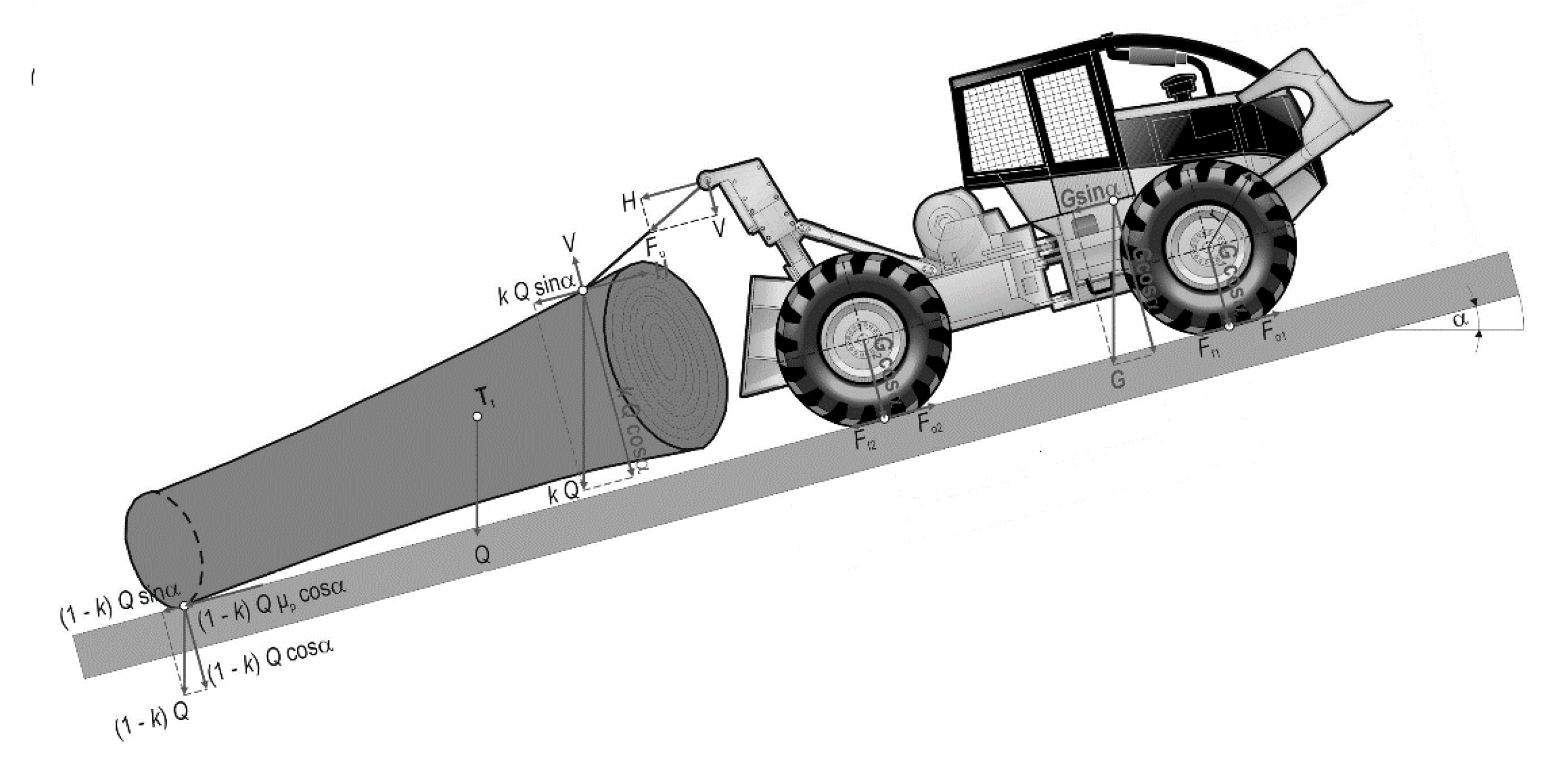
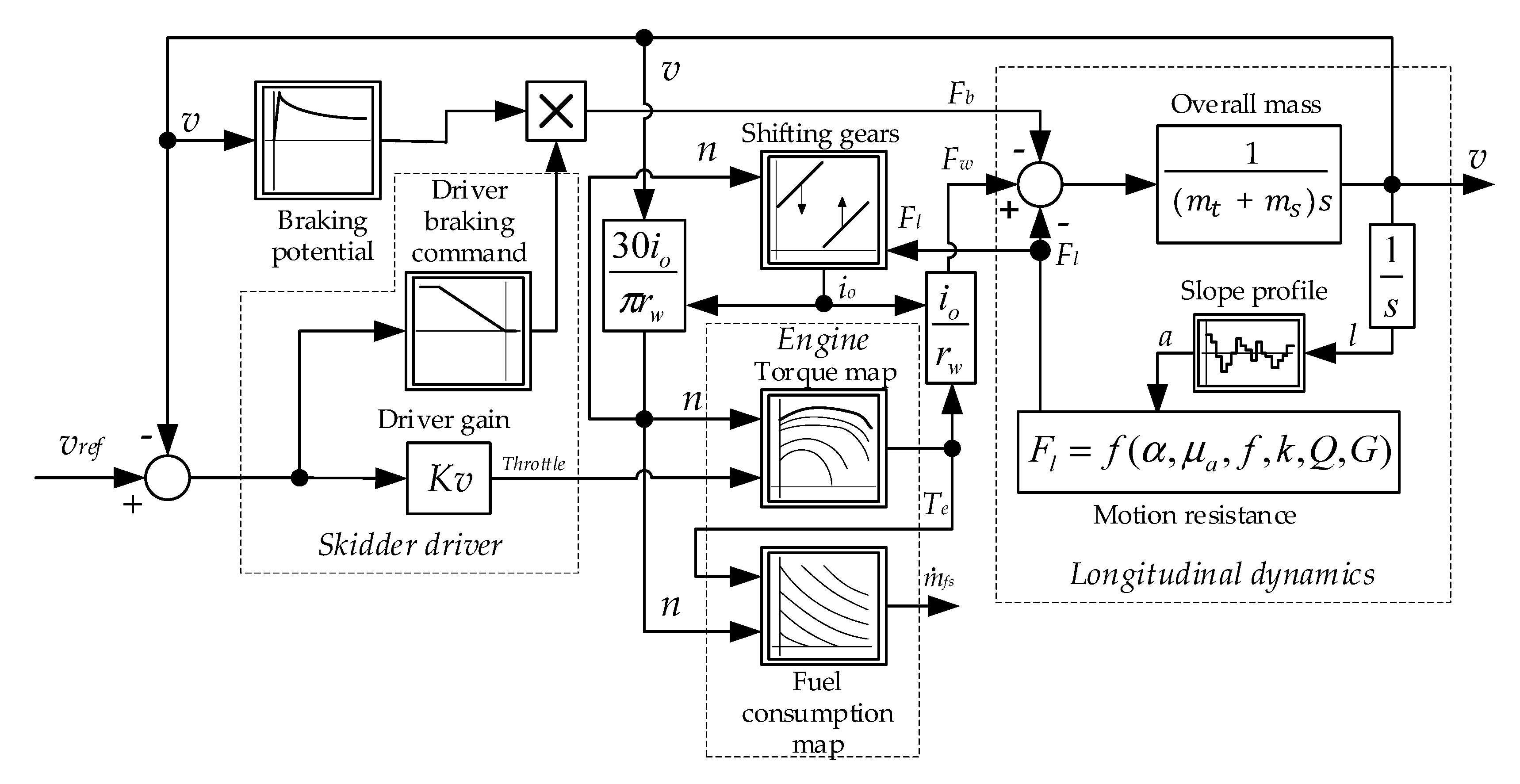
2.1.3. Longitudinal Dynamics
2.1.4. Gear Selection
2.1.5. Overall Conventional Skidder Model
2.2. Hybrid Powertrain
2.2.1. Electromotor Selection
2.2.2. Battery
2.2.3. Hybrid Control Strategy
- IF SoC < 60% AND brake = 0 AND rpm > 1300 && < 1800 AND Trq < Topt
- new throttle = torque map (rpm, Topt)
- EM signal = Topt − Trq
- IF SoC > 40% AND Trq > Topt
- EM signal = Topt − Trq
- EM helps with full torque value if the engine operating point crosses 1850 min−1 and the throttle is pushed. On driving routes with frequent inclines and smaller loads, battery saturation is possible. To overcome that problem, a third requirement is added:
- If battery SoC exceeds 85%, EM turns on and helps with torque regardless of engine operating point:
- IF SoC < 90% AND brake > 0
- EM signal = brake * Pk * gear ratio
3. Skidder Daily Working Cycle
3.1. Driving Routes
3.2. Winching Operations
3.3. Reference Velocity of Custom Driving Cycle
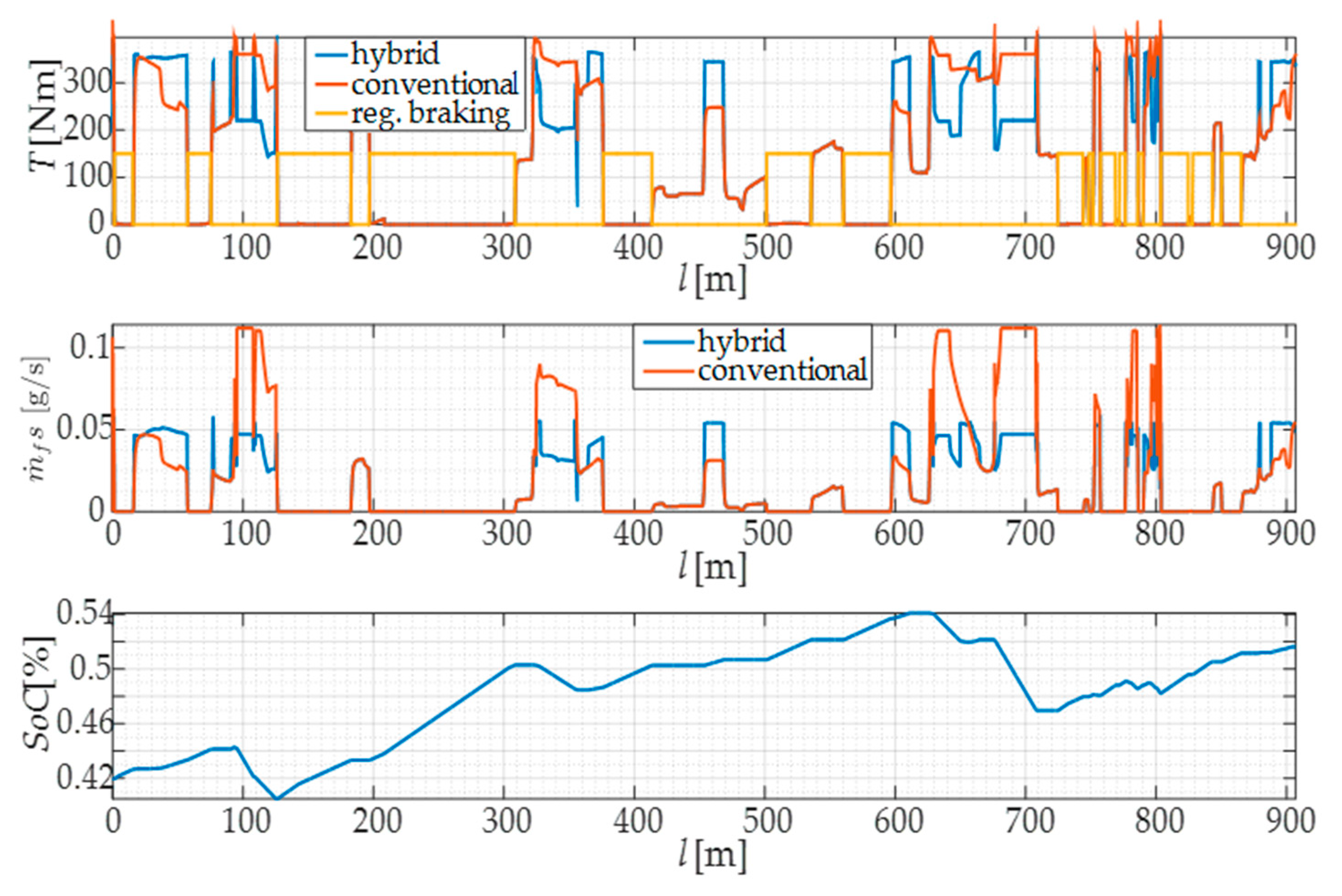
4. Simulation Results
5. Overall Results Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shaheen, A.S.; Lipman, T.E. Reducing Greenhouse Emissions and Fuel Consumption: Sustainable Approaches for Surface Transportation. IATSS Res. 2007, 31, 6–20. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, M.; Hao, H.; Johnson, L.; Wang, H.; Hao, H. Plug-in electric vehicle market penetration and incentives: A global review. Miting Adapt. Strateg. Glob. Chang. 2015, 20, 777–795. [Google Scholar] [CrossRef]
- Non-Road Mobile Machinery (NRMM). Available online: https://www.london.gov.uk/what-we-do/environment/pollution-and-air-quality/nrmm (accessed on 22 April 2020).
- Lajunen, A.; Suomela, J.; Pippuri, J.; Tammi, K.; Lehmuspelto, T.; Sainio, P. Electric and Hybrid Electric Non-Road Mobile Machinery—Present Situation and Future Trends. World Electr. Veh. J. 2016, 8, 172–183. [Google Scholar] [CrossRef]
- Strehlke, B. How We Work and Live, Forest Workers Talk about Themselves: A Global Account of Working and Living Conditions in the Forestry Sector; International Labour Organization: Geneva, Switzerland, 2003. [Google Scholar]
- Vandenbroucke, D.; Van Hyfte, A.; Francx, L. Study in View of the Revision of Directive 97/68/EC on Non-Road Mobile Machinery (NRMM), An Emissions Inventory and Impact Assessment, Final Report, December 2010; Publications Office of the EU: Luxembourg, 2010. [Google Scholar]
- Labelle, E.R.; Lemmer, K.J. Selected Environmental Impacts of Forest Harvesting Operations with Varying Degree of Mechanization. Croat. J. For. Eng. 2019, 40, 239–257. [Google Scholar] [CrossRef]
- Klvač, R.; Ward, S.; Philip, M.O.; Owende, P.M.O.; Lyons, J. Energy Audit of Wood Harvesting Systems. Scan J. For. Res. 2003, 18, 176–183. [Google Scholar] [CrossRef]
- Đuka, A.; Vusić, D.; Horvat, D.; Šušnjar, M.; Pandur, Z.; Papa, I. LCA Studies in Forestry—Stagnation or Progress? Croat. J. For. Eng. 2017, 38, 311–326. [Google Scholar]
- Ponse Ergo—Flexim. Available online: https://flexim.sk/ponsse-harvestory/ponsse-ergo/ (accessed on 12 February 2020).
- LOGSET 12H GTE Hybrid Harvester. Available online: https://www.logset.com/sites/default/files/product-pdf/LOGSET_12H%20GTE%20Hybrid_EN_web.pdf (accessed on 13 March 2020).
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems—Introduction to Modeling and Optimization, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Hittner Tractors—Croatia. Available online: http://hittner.hr/tractors (accessed on 6 May 2020).
- Tomljanović, K. Potrošnja Goriva Skidera (Skidder Fuel Consumption). Master’s Thesis, University of Zagreb, Zagreb, Croatia, 2019; pp. 18–26. (In Croatian). [Google Scholar]
- Knežević, I. Preoblikovanje razvodnika snage šumskog traktora za pogon svih kotača i vitla (Reshaping Power Distributor of Skidder to Drive all the Wheels and Winches). Master’s Thesis, University of Zagreb, Zagreb, Croatia, 2010; pp. 12–16. (In Croatian). [Google Scholar]
- Certificate, D914L06, DEUTZ AG, DE-51057, Cologne, Germany. 2004.
- Available online: https://www.cmlabs.com/vortexstudiodocumentation/Vortex_User_Documentation/Content/Editor/editor_vs_configure_engine.html (accessed on 5 May 2020).
- He, H.; Tang, H.; Wang, X. Global Optimal Energy Management Strategy Research for a Plug-In Series-Parallel Hybrid Electric Bus by Using Dynamic Programming, Special issue: Advanced Control and Optimization with Applications to Complex Automotive Systems. Math. Prob. Eng. 2013, 2013, 1–11. [Google Scholar] [CrossRef]
- Seliž, A. Specifičnosti sigurnosti pri radu skidera u fazi II, iskorištavanju šuma (Safety Specifics during Skidderr Operation in Phase II – Forest Exploitation). Bachelor’s Thesis, Karlovac University of Applied Sciences, Karlovac, Croatia, 2016; pp. 7–8. (In Croatian). [Google Scholar]
- Đuka, A.; Pentek, T.; Horvat, D.; Poršinsky, T. Modelling of Downhill Timber Skidding:Bigger Load—Bigger Slope. Croat. J. For. Eng. 2016, 37, 139–150. [Google Scholar]
- Šušnjar, M. Istraživanje međusobne ovisnosti značajki tla traktorske vlake i vučne značajke skidera (Interaction between soil characteritics of skid trail and tractive characteritics of skidder). Ph.D. Thesis, University of Zagreb, Zagreb, Croatia, 2005; pp. 10–15. (In Croatian). [Google Scholar]
- Gregov, G. Prilog istraživanju modeliranju hidrostatske transmisije na šumskom vozilu. Ph.D. Thesis, University of Rijeka, Rijeka, Croatia, 2012; p. 132. [Google Scholar]
- Çalışkan, K.; Yildirim, M.; Unlusoy, Y.S.; Kilic, V. Development of a Hybrid Electric Heavy Duty Truck. Int. J. Heavy Veh. Syst. 2018, 25, 203–222. [Google Scholar]
- Dalboni, M.; Santarelli, P.; Patroncini, P.; Soldati, A.; Concari, C.; Lusignani, D. Electrification of a Compact Agricultural Tractor: A Successful Case Study. IEEE Transp. Electrif. Conf. Expo 2019, 1–6. [Google Scholar] [CrossRef]
- EVO Axial Flux Electic Motor—AF 130 Model. Available online: https://www.neweagle.net/support/wiki/ProductDocumentation/EV_Software_and_Hardware/Electric_Motors/AVID/EVO-AF130.pdf (accessed on 7 March 2020).
- Cipek, M.; Pavković, D.; Kljaić, Z.; Mlinarić, T.J. Assessment of battery-hybrid diesel-electric locomotive fuel savings and emission reduction potentials based on a realistic mountainous rail route. Energy 2019, 173, 1154–1171. [Google Scholar] [CrossRef]
- Liu, J.; Peng, H. Modeling and control of a power-split hybrid vehicle. IEEE Trans. Control Syst. Technol. 2008, 16, 1242–1251. [Google Scholar] [CrossRef]
- Proto, A.R.; Visser, R.; Russo, D.; Zimbalatti, G.; Macri, G. Comparison of Timber Extraction Productivity between Winch and Grapple Skidding: A Case Study in Southern Italian Forests. Forests 2018, 9, 61. [Google Scholar] [CrossRef]
- Gulci, S. Productivity of a farm tractor with single drum winch during whole-tree timber extraction Proizvodnost adaptiranog poljoprivrednog traktora s jednobubanjskim vitlom tijekom privlačenja drva stablovnom metodom. Šumarski List 2020, 144, 43. [Google Scholar] [CrossRef]
- Fact #861 23 February 2015 Idle Fuel Consumption for Selected Gasoline and Diesel Vehicles. Available online: https://www.energy.gov/eere/vehicles/fact-861-february-23-2015-idle-fuel-consumption-selected-gasoline-and-diesel-vehicles (accessed on 10 March 2020).
- Youtube. Available online: https://youtu.be/-PGq6zMAsjA (accessed on 21 January 2020).
- MathWorks. Available online: https://www.mathworks.com/help/signal/ref/sgolayfilt.html (accessed on 1 March 2020).
- Available online: https://about.bnef.com/blog/battery-pack-prices-fall-as-market-ramps-up-with-market-average-at-156-kwh-in-2019/ (accessed on 10 March 2020).
- Available online: https://www.avid.com/ (accessed on 2 March 2020).
- Available online: https://autotraveler.ru/en/croatia/trend-price-fuel-croatia.html#.XzvT4-gzYuV (accessed on 17 August 2020).
- Poršinsky, T.; Moro, M.; Duka, A. Maneuverability characteristics of cable skidder. Sumarski List 2016, 140, 259–272. [Google Scholar] [CrossRef]
- Holzleitner, F.; Stampfer, K.; Visser, R. Utilization Rates and Cost Factors in Timber Harvesting Based on Long-term Machine Data. Croat. J. For. Eng. 2011, 32, 501–508. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gear | Total Gear Ratio (-) | Top Speed at 2300 min−1 (km/h) |
|---|---|---|
| 1 | 213 | 2.9 |
| 2 | 116 | 5.3 |
| 3 | 70 | 8.7 |
| 4 | 44 | 14.1 |
| 5 | 29 | 21.1 |
| Work Regime | Diesel Engine | Electromotor | Clutch 1 | Clutch 2 | Clutch 3 |
|---|---|---|---|---|---|
| In Optimal | On | Off | Engaged | Engaged | Disengaged |
| Low Power | On | Generator | Engaged | Engaged | Disengaged |
| High Power | On | Motor | Engaged | Engaged | Disengaged |
| Regenerative | |||||
| Braking | On | Generator | Disengaged | Engaged | Disengaged |
| Winching | Off | Motor | Disengaged | Disengaged | Engaged |
| Parameters | AF 130 |
|---|---|
| Nominal Torque NEM [Nm] | 145 |
| Nominal Power PEM [kW] | 64 |
| Peak Power—up to 60 s [kW] | 100 |
| Radius-Length | 300–110 |
| Mass mEM [kg] | 30.5 |
| Number N | Energy, E (kWh) | Capacity Q (Ah) | Power, Pmax (kW) | Mass, mbat (kg) | |
|---|---|---|---|---|---|
| Cell | 1 | 0.06 | 15.9 | 0.4 | 0.63 |
| Battery | 250 | 15 | 31.8 | 100 | 157.2 |
| Driving Scenario | Route-dir.–log mass mt [t] | Skidding Length l [km] | Rolling Resistance f | Load Mass Distribution k | Skidding Resistance Coefficient μp |
|---|---|---|---|---|---|
| 1.1 | 1-uphill-0 | 1.06 | 0.17 | 0 | 0 |
| 1.2 | 1-downhill-4.5 | 1.06 | 0.17 | 0.36 | 0.46 |
| 1.3 | 1-uphill-0 | 1.06 | 0.15 | 0 | 0 |
| 1.4 | 1-downhill-6 | 1.06 | 0.15 | 0.56 | 0.4 |
| 1.5 | 1-uphill-0 | 1.06 | 0.13 | 0 | 0 |
| 1.6 | 1-downhill-1.3 | 1.06 | 0.10 | 0.45 | 0.4 |
| 1.7 | 1-uphill-0 | 1.06 | 0.10 | 0 | 0 |
| 1.8 | 1-downhill-3.6 | 1.06 | 0.15 | 0.43 | 0.6 |
| 2.1 | 2-uphill-0 | 0.907 | 0.15 | 0 | 0 |
| 2.2 | 2-downhill-3 | 0.907 | 0.15 | 0.6 | 0.5 |
| 2.3 | 2-uphill-0 | 0.907 | 0.17 | 0 | 0 |
| 2.4 | 2-downhill-6 | 0.907 | 0.18 | 0.48 | 0.5 |
| 2.5 | 2-uphill-0 | 0.907 | 0.11 | 0 | 0 |
| 2.6 | 2-downhill-5.1 | 0.907 | 0.11 | 0.52 | 0.47 |
| 2.7 | 2-uphill-0 | 0.907 | 0.18 | 0 | 0 |
| 2.8 | 2-downhill-5.5 | 0.907 | 0.18 | 0.52 | 0.47 |
| Winching Operation | Winching Length lw [m] | Log Mass mt [t] | Slope α [o] | Pulling Factor μp |
|---|---|---|---|---|
| 1 | 10 | 4.5 | 14 | 0.6 |
| 2 | 23 | 6 | 25 | 0.56 |
| 3 | 9 | 1.3 | 19 | 0.34 |
| 4 | 35 | 3.6 | 21 | 0.51 |
| 5 | 21 | 3 | 11 | 0.43 |
| 6 | 15 | 6 | 27 | 0.42 |
| 7 | 19 | 5.1 | 16 | 0.6 |
| 8 | 31 | 5.5 | 20 | 0.48 |
| Gear | Reference Velocity [km/h] |
|---|---|
| 1 | 2.8 |
| 2 | 4.7 |
| 3 | 7.9 |
| 4 | 11.2 |
| 5 | 15.5 |
| Driving Scenario | Work Cycle Time t [s] | Conventional Skidder Fuel Consumption gc [L] | Initial SoC vs. SoC Change SoC0/ΔSoC [%] | Hybrid Skidder Fuel Consumption gh [L] |
|---|---|---|---|---|
| 1.1 | 455 | 1.75 | 65/−23 | 1.46 |
| 1.2 | 450 | 1.22 | 41/+10 | 1.12 |
| 1.3 | 436 | 1.64 | 51/−11 | 1.49 |
| 1.4 | 556 | 1.96 | 36/+4 | 1.82 |
| 1.5 | 408 | 1.52 | 40/+2 | 1.47 |
| 1.6 | 359 | 0.74 | 41/+14 | 0.67 |
| 1.7 | 385 | 1.37 | 55/−8 | 1.24 |
| 1.8 | 376 | 0.80 | 43/+16 | 0.71 |
| 2.1 | 408 | 1.50 | 59/−15 | 1.31 |
| 2.2 | 413 | 1.06 | 42/+10 | 0.95 |
| 2.3 | 397 | 1.43 | 52/−10 | 1.27 |
| 2.4 | 478 | 1.32 | 40/+11 | 1.16 |
| 2.5 | 382 | 1.35 | 51/−10 | 1.20 |
| 2.6 | 451 | 1.28 | 37/+17 | 1.06 |
| 2.7 | 446 | 1.63 | 54/−12 | 1.49 |
| 2.8 | 516 | 1.50 | 36/+13 | 1.39 |
| Winching Operation | Neutral vs. Winching Time tn/tw [s] | Winching vs. Neutral Fuel Consumption gw/gn [L] | State-of-Charge Variation ΔSoC [%] |
|---|---|---|---|
| 1 | 41/10 | 0.03/0.26 | −1.8 |
| 2 | 84/22 | 0.73/0.053 | −4.8 |
| 3 | 30/9 | 0.066/0.019 | −0.3 |
| 4 | 114/34 | 0.072/0.072 | −4.2 |
| 5 | 71/20 | 0.039/0.044 | −1.8 |
| 6 | 60/15 | 0.041/0.038 | −2.3 |
| 7 | 70/19 | 0.059/0.044 | −3.9 |
| 8 | 107/30 | 0.088/0.067 | −5.3 |
| Cycle | Cycle Time Tcycle [s] | Conventional Skidder Cycle Fuel Consumption gc, cycle [L] | Hybrid Skidder Cycle Fuel Consumption gh, cycle [L] |
|---|---|---|---|
| 1 | 961 | 3.04 | 2.67 |
| 2 | 1103 | 3.75 | 3.31 |
| 3 | 806 | 2.36 | 2.14 |
| 4 | 914 | 2.33 | 1.95 |
| 5 | 917 | 2.64 | 2.26 |
| 6 | 955 | 2.84 | 2.43 |
| 7 | 922 | 2.76 | 2.26 |
| 8 | 1099 | 3.30 | 2.88 |
| Average | 960 | 2.88 | 2.49 |
| Work Day | Time | Share in Time [%] | Fuel Used [L] | Share in Consumption [%] |
|---|---|---|---|---|
| Total | 8 h | 86.3 | ||
| Driving | 7 h 12 min | 90 | 82.76 | 96 |
| Winch | 12 min | 2.5 | 2.12 | 2.46 |
| Idling | 36 min | 7.5 | 1.41 | 1.54 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karlušić, J.; Cipek, M.; Pavković, D.; Benić, J.; Šitum, Ž.; Pandur, Z.; Šušnjar, M. Simulation Models of Skidder Conventional and Hybrid Drive. Forests 2020, 11, 921. https://doi.org/10.3390/f11090921
Karlušić J, Cipek M, Pavković D, Benić J, Šitum Ž, Pandur Z, Šušnjar M. Simulation Models of Skidder Conventional and Hybrid Drive. Forests. 2020; 11(9):921. https://doi.org/10.3390/f11090921
Chicago/Turabian StyleKarlušić, Juraj, Mihael Cipek, Danijel Pavković, Juraj Benić, Željko Šitum, Zdravko Pandur, and Marijan Šušnjar. 2020. "Simulation Models of Skidder Conventional and Hybrid Drive" Forests 11, no. 9: 921. https://doi.org/10.3390/f11090921
APA StyleKarlušić, J., Cipek, M., Pavković, D., Benić, J., Šitum, Ž., Pandur, Z., & Šušnjar, M. (2020). Simulation Models of Skidder Conventional and Hybrid Drive. Forests, 11(9), 921. https://doi.org/10.3390/f11090921