1. Introduction
In the dynamic and rapidly evolving field of gaming artificial intelligence (AI), developing sophisticated autonomous agents has become a central goal, particularly in complex and interactive environments [
1]. One of the most promising approaches to achieving advanced decision-making and automation in games involves deep reinforcement learning (DRL), a technique that merges the depth of deep learning (DL) with the goal-oriented capabilities of Reinforcement Learning (RL). These two conventional approaches are combined to overcome the limitations of RL in complex environments with large state spaces [
2].
DRL-based algorithms deliver outstanding performance; however, the frequent need for evaluation significantly contributes to computational overload, resulting in notable decision delays and a decline in overall system performance [
3]. The use of DRL in simulating autonomous driving within a game setting offers a unique opportunity to test and refine AI methodologies in an environment that mimics real-world dynamics. However, unlike standard toy problems often used in experimentation, the environment addressed in this paper simulates a real-world scenario with greater complexity and computational demands. This increased complexity enables a more rigorous evaluation of reinforcement learning algorithms like Proximal Policy Optimization (PPO) and Soft Actor–Critic (SAC), pushing them closer to real-world application limits. Through this, we aim to demonstrate whether these models are capable of addressing real-world problems or remain constrained to controlled research environments.
Unlike many recent studies, which focus primarily on theoretical DRL techniques and sensor integration [
4], or explore different system architectures for autonomous driving [
5], this work diverges by offering a simulation environment that closely approximates real-world conditions. While approaches like Model-Based Imitation Learning for Urban Driving (MILE) [
6] represent steps toward reality, they utilize different methods and goals. Similarly, other works, such as the Performance Analysis of Deep Neural Network Controllers for Autonomous Driving using Nonlinear Model Predictive Control [
7], focus on specific control strategies. In some cases, DRL has also been applied to trajectory planning problems, such as in the DRL-QiER framework, which combines DRL with quantum-inspired experience replay to optimize UAV mobility while minimizing communication outages [
8]. Unlike DRL-QiER, which addresses UAV-specific challenges like airspace boundaries and wireless connectivity, this research focuses on terrestrial navigation with unique constraints, such as realistic motorcycle physics and complex terrain-based obstacles. In contrast, this research takes a more holistic approach by testing DRL techniques in a gaming environment that mirrors real-world driving dynamics. This allows for the evaluation of both decision-making efficiency and adaptability in a more realistic setting.
Although a significant design challenge for these scenarios is the transfer of learning, as the experience of playing a game differs greatly from driving a vehicle [
9], this controlled setting allows for rapid experimentation and iteration, which is essential for advancing AI technologies and transferring learned lessons into real-world situations [
10]. This study undertakes a comprehensive examination of DRL techniques to evaluate their effectiveness in improving the learning efficiency, decision-making accuracy, and adaptability of autonomous car agents in dynamic and potentially unpredictable gaming scenarios.
While DRL offers significant advantages to these scenarios, challenges remain in effectively learning from sparse, high-dimensional sensory inputs and ensuring safety and robustness in real-world driving scenarios. To address these challenges, increasing model complexity aims to enhance adaptability to intricate situations and improve generalization capacity. However, this approach also demands substantial volumes of high-quality training data, thereby increasing the complexity of the learning process and presenting additional hurdles in achieving efficient and effective training [
11].
As the project progresses, we are introducing increasingly realistic and complex dynamics into the simulation environment. Currently, we are incorporating a detailed map based on the real-world geography of Vila Real, Portugal, which adds specificity and complexity to the terrain. Additionally, the simulation now features a motorcycle with more complex physics, requiring advanced handling of speed, balance, and motion. Obstacles such as terrain features and environmental challenges are being used as key constraints, pushing the DRL models to adapt to real-world driving conditions. This evolving complexity reflects the challenges faced in autonomous vehicle scenarios and drives further refinement of the models’ scalability and adaptability in handling intricate environments. Moreover, through an extensive review of related work, which we summarize in
Table 1, we did not find any projects that implemented DRL techniques within such a complex and realistic scenario. The combination of a detailed geographic map, realistic motorcycle physics, and the introduction of environmental obstacles sets this project apart, offering a unique challenge and opportunity for testing and advancing the capabilities of DRL models in real-world applications. A preview of the new environment, including the detailed map and enhanced physics features, is already being developed and will be provided later in this article to illustrate the complexity and realism achieved.
This work contributes to the existing body of research by providing insights and practical applications that can enhance real-world autonomous vehicle technology, offering a safe and cost-effective platform for testing complex AI-driven navigation strategies. By focusing on a vehicle navigating towards a target, this research not only enhances our understanding of how DRL can be applied to specific tasks in gaming but also contributes to the broader field of AI by demonstrating the potential of these techniques to develop agents that can learn and adapt in real-time. The findings indicate that DRL significantly improves the autonomy and realism of the vehicle’s behavior, showcasing enhanced learning capabilities and more refined interaction dynamics within complex gaming environments. By exploring the application of DRL within the Unity engine to enhance the navigational abilities of a virtual vehicle, this work focuses on improving autonomous navigation to enable the vehicle to reach targets efficiently and adaptively. Subsequently, these findings can be applied and transposed to real application scenarios, such as the support of route and driving behavior definition for the electric motorbikes developed in the scope of the A-MoVeR project (see Funding and Acknowledgments sections).
Ultimately, this research aims to advance the development of innovative machine learning (ML) and AI approaches, potentially revolutionizing how autonomous systems adapt to and interact with their environment and other entities. This work also highlights the importance of using games as a means to develop and test AI models, preparing them for real-world applications and leading to more realistic and dynamic experiences in both gaming and practical scenarios.
This paper is structured in the following way. After this introduction,
Section 2 provides an overview of the ML-Agents Toolkit used for training the agents, followed by detailed explanations of ML training methods, focusing on PPO and SAC.
Section 3 details the practical project’s structure, providing information about the environment, using the Unity engine, and the overview of the main objectives, with an emphasis on the current phase of simpler vehicle navigation, including the reward system and hyperparameters used. It also briefly outlines the three subsequent phases of the project, each progressively incorporating more realistic features. Finally,
Section 4 presents the achieved results and evaluates the effectiveness of DRL techniques used in the defined scenarios.
3. Environment
The environment for our deep reinforcement learning study is designed to simulate a complex urban road network where an autonomous car must navigate effectively to reach a destination. The environment, built using the Unity engine, is structured as a grid of roads, resembling the layout of a well-organized city. Specifically, the design includes 6 parallel roads intersected by another 7 parallel roads, forming a grid that can be visualized as a table with rows and columns corresponding to these roads (
Figure 1). This setup creates a total of 42 intersections where the roads meet, providing numerous possible paths and complex scenarios for the autonomous car to learn and navigate.
The project is structured to progress through several phases, each involving tests in various situations with different parameters. Currently, we are at a very early stage, with our primary focus on developing and refining the foundational aspects of our environment and testing the basic capabilities of our deep reinforcement learning models. At this initial phase, the environment remains quite simple, utilizing default parameters from the tutorials provided by the ML-Agents Toolkit. The phases will be described in the following subsections. Throughout all phases, the agent must prioritize paths that minimize the overall time to reach the targets. Hyperparameter tuning will be crucial for enhancing the performance of the models. The current phase of the project utilizes PPO and SAC to identify the most effective learning approach. The increasing complexity and evolution through the phases aim to develop a robust and adaptable autonomous navigation system, ensuring meticulous attention to detail and comprehensive scenario handling.
3.1. Unity Engine
The Unity engine [
31], developed by Unity Technologies, is a leading platform for developing interactive, real-time 3D and 2D experiences. The engine offers an interactive simulation environment that provides a rich user experience [
32]. Beyond their original purpose of video game development/designing, the versatility and robustness of modern game engines have extended their influence in designing realistic scenarios of various fields, making them invaluable across diverse sectors. Users who extend their design processes beyond gaming demonstrate the Unity engine’s versatility as a comprehensive design tool applicable to various fields beyond game development [
33]. Unity’s workflow distinguishes itself from most other game development environments through its highly efficient visual process and broad cross-platform support, making it a favorite among developers [
34].
3.2. Phase 1: Basic Navigation
In the first phase of our project, the objective is straightforward. The car only needs to reach the target, regardless of whether the target is on the road or not, by employing PPO and SAC.
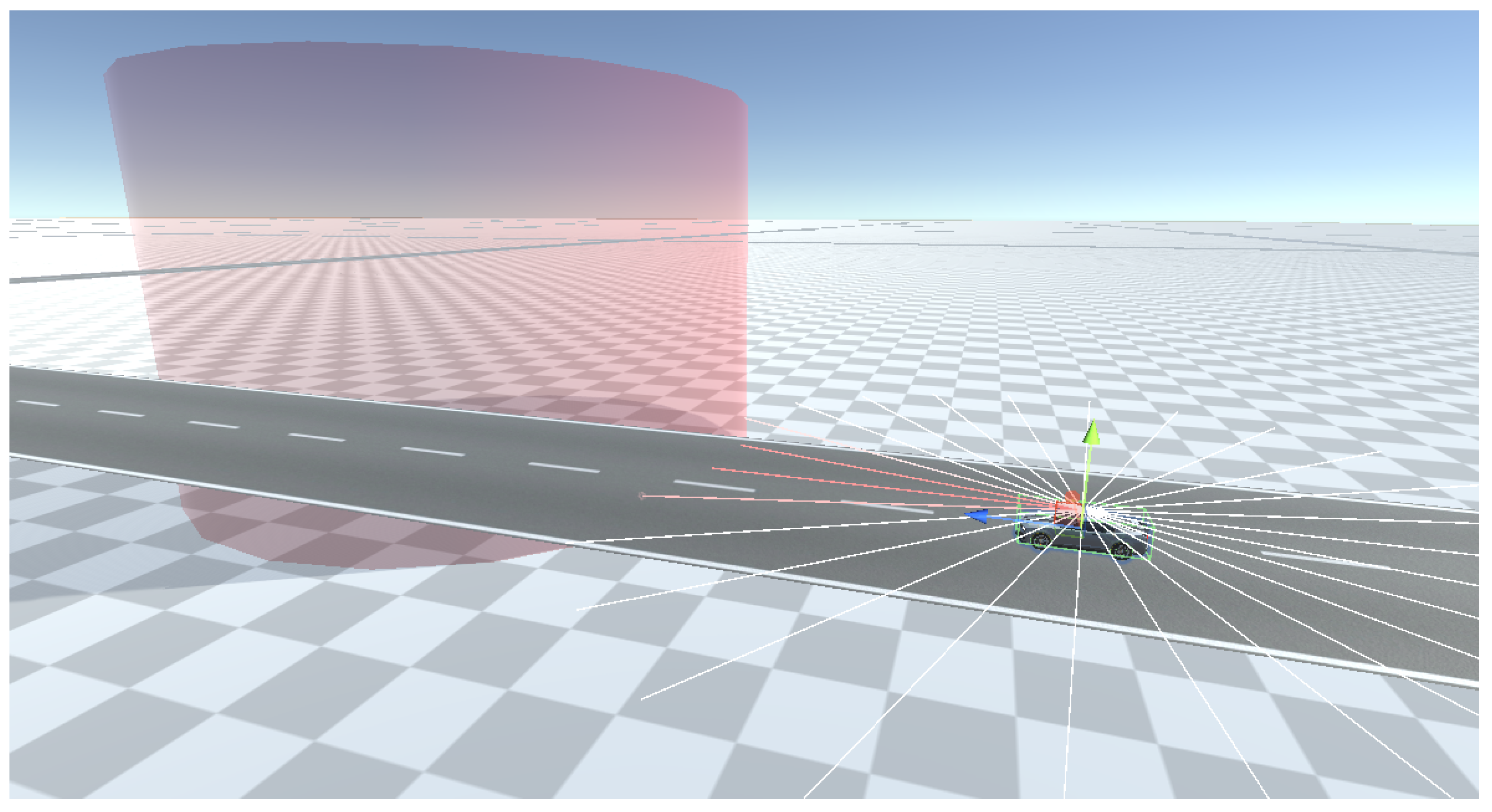
To navigate the environment, the car is equipped with a 360-degree sensor that collects data from all directions, providing comprehensive situational awareness to the agent (
Figure 2). This sensor setup ensures that the car can make informed decisions based on a full understanding of its surroundings.
3.2.1. Reward System
The reward structure in this phase is designed to encourage the car to reach the target efficiently. The car receives a significant reward when it reaches the target, which is registered as a collision with the target object, and receives an extra reward based on time efficiency. Additionally, incremental rewards are given as the car approaches the target, incentivizing it to move in the correct direction based on the angle to the target. Conversely, the car is penalized for actions that are counterproductive to reaching the target. These penalties include moving away from the target, significant backward movement, and taking too long to reach the target. The car also incurs a significant penalty when it reaches the environment’s limits, indicated by a collision with the boundary.
Proximity-Based Incremental Rewards:
Penalties:
Moving Away from the Target: - −
: Penalty for moving away from the target.
- −
: Penalty for significant backward movement.
- −
: Penalty for taking too long.
- −
: Penalty for colliding with the environment’s boundary.
The reward structure is strategically designed to promote efficient and direct movement towards the target while discouraging deviations from this goal. The combination of significant target-reaching rewards, incremental proximity-based rewards, and penalties for counterproductive actions forms a comprehensive framework that guides the car towards optimal performance.
3.2.2. Hyperparameters
The hyperparameters are fine-tuned to optimize the performance of the autonomous car in reaching its target efficiently. These parameters are configured in a YAML file, provided by the ML-Agents’ flexibility, which allows for easy modification and experimentation. In this initial phase the configurations used were based on the default ML-Agents hyperparameters, providing a solid foundation for further refinement [
35,
36]. Each hyperparameter is described and can be consulted in the documents provided by Unity Technologies [
37], but there are some that require particular attention due to their significant impact on training performance, these are described below.
Shared Hyperparameters
The learning rate is the step size for gradient descent updates. A higher learning rate can speed up training but may cause instability, whereas a lower learning rate leads to more stable training but requires more iterations. The typical range for the learning rate is to , with a default value of .
The batch size refers to the number of training samples per mini-batch. Larger batch sizes can provide more accurate gradient estimates but require more memory and computational power. The typical range for batch size is from 32 to 512, with default values being 64 for PPO and 256 for SAC.
The gamma parameter is the discount factor for future rewards. A higher gamma value puts more weight on future rewards, promoting long-term strategies. The typical range is from 0.8 to 0.995, with a default value of 0.99.
Proximal Policy Optimization (PPO)
For PPO, the clip ratio is a crucial parameter. It is used to clip the policy objective to prevent large updates, helping to maintain stable updates by limiting the extent to which the policy is changed in a single update. This parameter typically ranges from 0.1 to 0.3, with a default value of 0.2.
The number of epochs refers to how many times the learning algorithm will work through the entire training dataset. More epochs mean more thorough learning from the collected data but increase computational time. The typical range is from 3 to 10, with a default value of 10.
The GAE lambda is a smoothing parameter for Generalized Advantage Estimation (GAE). It balances bias and variance in advantage estimation, where higher values provide lower variance but higher bias. The typical range for GAE lambda is from 0.9 to 0.95, with a default value of 0.95.
The entropy coefficient is used for entropy regularization, encouraging exploration by adding an entropy term to the loss function. This prevents the policy from converging prematurely to suboptimal solutions. The entropy coefficient typically ranges from 0.01 to 0.1, with a default value of 0.01.
Soft Actor–Critic (SAC)
For SAC, the tau parameter is the interpolation parameter for the soft update of target network parameters. It affects the update speed of the target networks, balancing stability and responsiveness. The typical range for tau is from 0.005 to 0.05, with a default value of 0.005.
The alpha parameter is the entropy regularization coefficient, which determines the balance between exploration and exploitation. Higher values encourage more exploration, which can help in finding better policies but may also slow down convergence. The typical range for alpha is from 0.1 to 0.2, with a default value of 0.2.
The target update interval specifies the number of steps between target network updates. Frequent updates can make the training more responsive, while less frequent updates can enhance stability. The typical range is from 1 to 1000, with a default value of 1.
Finally, the gradient steps refer to the number of gradient steps performed after each environment step. More gradient steps can lead to better policy updates per interaction with the environment but also increase computational load. The typical range is from 1 to 4, with a default value of 1.
Selecting the appropriate hyperparameters is essential for the training’s success. By understanding the roles and impacts of these hyperparameters, it is possible to achieve better performance in various environments. Beginning with the default values and adjusting as needed based on observed performance and stability is the recommended procedure to ensure effective and efficient training.
3.2.3. Implementation Overview
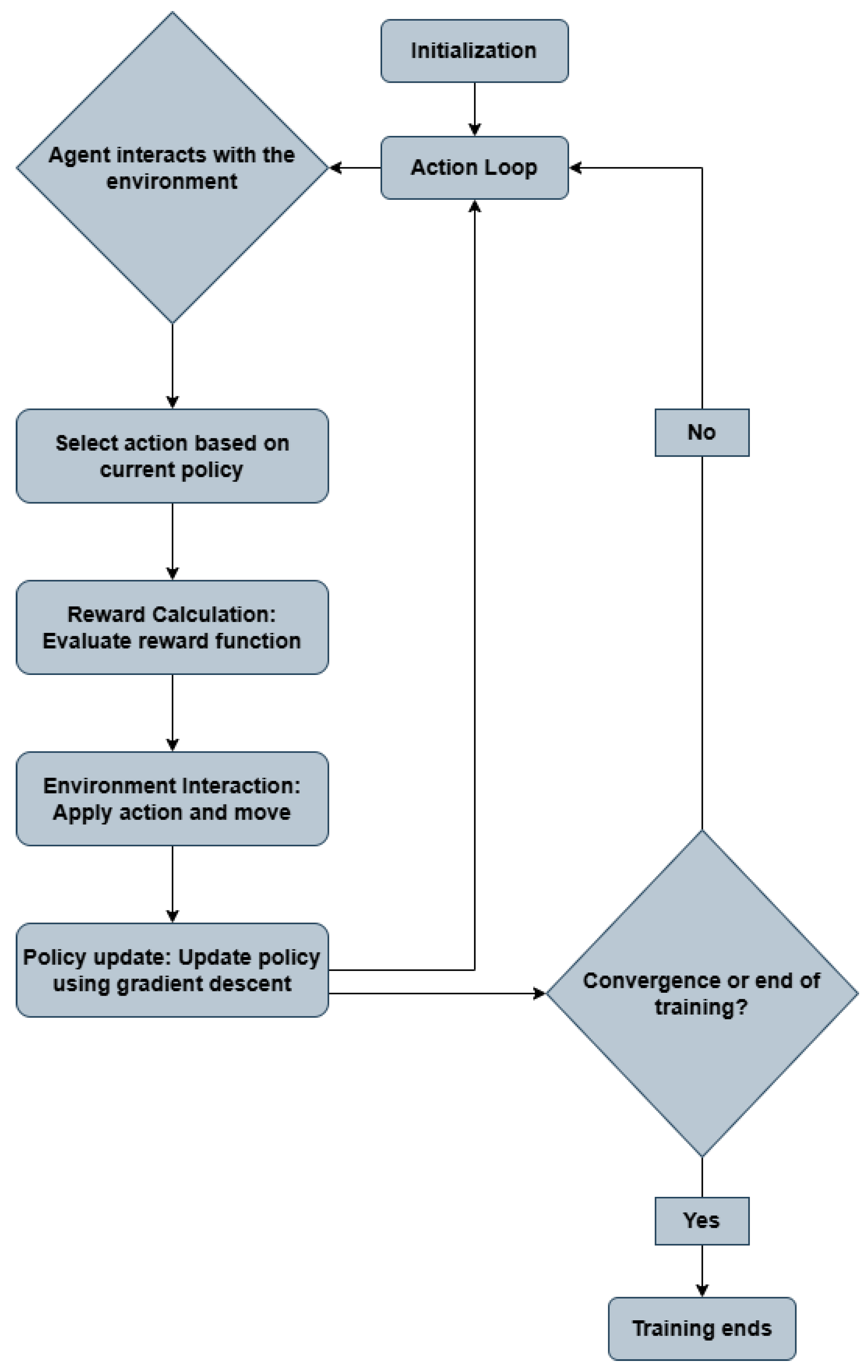
To provide a comprehensive understanding of the implementation, this section details the key steps involved in the car’s decision-making and learning process. The following components form the core of our implementation: initialization, action selection, reward application, and environment interaction. The flowchart,
Figure 3, illustrates the sequence of these steps, followed by pseudocode snippets that correspond to critical parts of the algorithm.
The flowchart highlights the following key steps:
Initialization: Set up the environment, define hyperparameters, and initialize the agent (car) with its PPO or SAC algorithm (see Algorithm 1).
Action Loop: For each episode, the agent senses its environment using the 360-degree sensor and selects an action based on the current policy (see Algorithm 2).
Environment Interaction: The selected action is applied to the environment, and the agent moves according to the chosen action (see Algorithm 2).
Reward Calculation: The reward function is evaluated based on the agent’s new state, considering proximity to the target, penalties for undesirable actions, and the time taken (see Algorithm 3).
Policy Update: Using the collected rewards and experiences, the agent updates its policy through gradient descent (see Algorithm 4).
Repeat: The process repeats until the agent converges on an optimal policy or the training session ends (see Algorithm 5).
Pseudocode Snippets
The following snippets correspond to the main components of the implementation, providing a structured representation of the logic described in the flowchart with a PPO example.
| Algorithm 1 Initialization |
- 1:
Initialize environment: - 2:
Initialize agent: -
-
- 3:
Initialize variables for tracking performance: - 4:
for each episode from 1 to do - 5:
▹ Reset environment for new episode - 6:
- 7:
end for
|
| Algorithm 2 Action Selection and Environment Interaction |
- 1:
while not done do - 2:
▹ Choose action using current policy - 3:
▹ Apply action and get new state - 4:
▹ Accumulate reward - 5:
Store transition: - 6:
▹ Update state - 7:
end while
|
| Algorithm 3 Reward Calculation |
- 1:
function calculate_reward(state, action, target_position) - 2:
if reached_target(state, target_position) then - 3:
- 4:
else if close_to_target(state, target_position) then - 5:
- 6:
else - 7:
- 8:
end if - 9:
if hit_boundary(state) then - 10:
- 11:
end if - 12:
return - 13:
end function
|
The reward function was designed to balance exploration and goal-oriented behavior, guiding the agent to navigate efficiently towards the target. Reaching the target yields a significant reward (base_reward + time_bonus), incentivizing success and efficient trajectories. Proximity rewards (proximity_reward × angle_reward) encourage steady progress while ensuring directional alignment.
Penalties discourage undesired behaviors, such as moving away from the target (penalty_for_bad_action) or hitting environment boundaries (boundary_penalty), reflecting real-world constraints. The modular design allows for easy adjustment of weights for different scenarios, ensuring flexibility and adaptability.
This function was iteratively refined during training to effectively incentivize desired behaviors, aligning with real-world applications.
| Algorithm 4 Policy Update |
- 1:
if done then - 2:
▹ Perform PPO updates using stored transitions - 3:
end if - 4:
Log episode results:
|
| Algorithm 5 End of Training |
- 1:
After training, evaluate agent performance:
|
3.3. Phase 2: Road-Bound Navigation
In the second phase, the complexity of the task increases as the car is required to reach the target while strictly adhering to the road. This phase introduces several enhancements to ensure the car remains on the designated path and navigates more effectively.
To achieve this, the integration of additional sensors into the car’s system is envisaged. These include road-edge detectors, which help the car recognize and stay within the boundaries of the road. Moreover, lane-keeping sensors will be added to provide real-time feedback on lane position, enabling the car to make precise adjustments to its trajectory.
The reward and penalty system need to be significantly adjusted to promote road adherence. The car will receive rewards not only for reaching the target but also for maintaining its position on the road. Specifically, incremental rewards will be given for staying within lane boundaries and making smooth turns at intersections.
Penalizations will be imposed for deviations from the road, such as veering off the lane or crossing road edges. Additional penalties will be introduced for unsafe driving behaviors, including sharp turns, sudden stops, and rapid acceleration, which could indicate a loss of control. The car will also be penalized for any collisions with road boundaries or other objects, reinforcing the importance of safe and precise navigation.
3.4. Phase 3: Multi-Target Navigation
The third phase introduces the challenge of multi-target navigation, requiring the car to reach multiple targets sequentially while staying on the road. This phase significantly enhances the complexity of the task, necessitating advanced capabilities in route planning and dynamic path adjustments.
To accomplish this, the car’s system will be upgraded with more sophisticated sensors and algorithms. These sensors will provide detailed information about the surroundings, enabling the car to plan its route more effectively.
Enhanced route planning capabilities will be implemented, allowing the car to dynamically adjust its path as it progresses towards each target. This involves the integration of real-time data processing and decision-making algorithms that can evaluate multiple routes and select the most efficient path. The car will also use predictive modeling to anticipate potential obstacles and traffic conditions, optimizing its navigation strategy.
The reward and penalty system will be further refined to account for the multi-target objective. Rewards will be given for reaching each target, with additional bonuses for efficiently transitioning between targets. Maintaining road adherence will continue to be rewarded, ensuring that the car navigates safely and reliably.
Penalizations will be introduced for missing targets, inefficient route choices, and any deviations from the road. The car will also be penalized for failing to reach targets within a reasonable time frame, encouraging prompt and efficient navigation. Collisions with road boundaries, obstacles, or other vehicles will incur significant penalties, reinforcing the importance of safe driving practices.
Moreover, this phase will simulate more complex urban environments with varied traffic patterns. The car must demonstrate the ability to navigate these scenarios while efficiently reaching multiple targets.
3.5. Phase 4: Obstacle-Aware Multi-Target Navigation
In the fourth and most complex phase, the car must navigate the road network, reach multiple targets, and avoid obstacles. This phase necessitates the introduction of advanced obstacle detection sensors and sophisticated decision-making capabilities to handle dynamic environments effectively.
To achieve this, the car will be equipped with a range of advanced sensors. These sensors will provide detailed, real-time data about the car’s surroundings, enabling it to detect and avoid obstacles accurately.
The algorithms will be significantly enhanced to process this sensor data and make real-time decisions. The car will use advanced obstacle avoidance algorithms to navigate around obstacles while staying on the road and reaching multiple targets. This will involve predictive modeling to anticipate the movement of dynamic obstacles and adjust the car’s path accordingly.
The reward and penalty system will be further refined to encourage safe and efficient navigation. Rewards will be given for successfully reaching each target, maintaining road adherence, and avoiding obstacles. Additional rewards will be provided for smooth navigation, efficient route planning, and prompt target acquisition.
Penalizations will be imposed for collisions with obstacles, deviating from the road, and inefficient navigation paths. The car will also be penalized for taking excessive time to reach targets or failing to avoid dynamic obstacles. These penalties will reinforce the importance of careful and efficient driving.
This phase will simulate highly dynamic and realistic urban environments. The car must demonstrate its ability to navigate these complex scenarios while maintaining high standards of safety and efficiency.
3.6. Preview of the New Environment
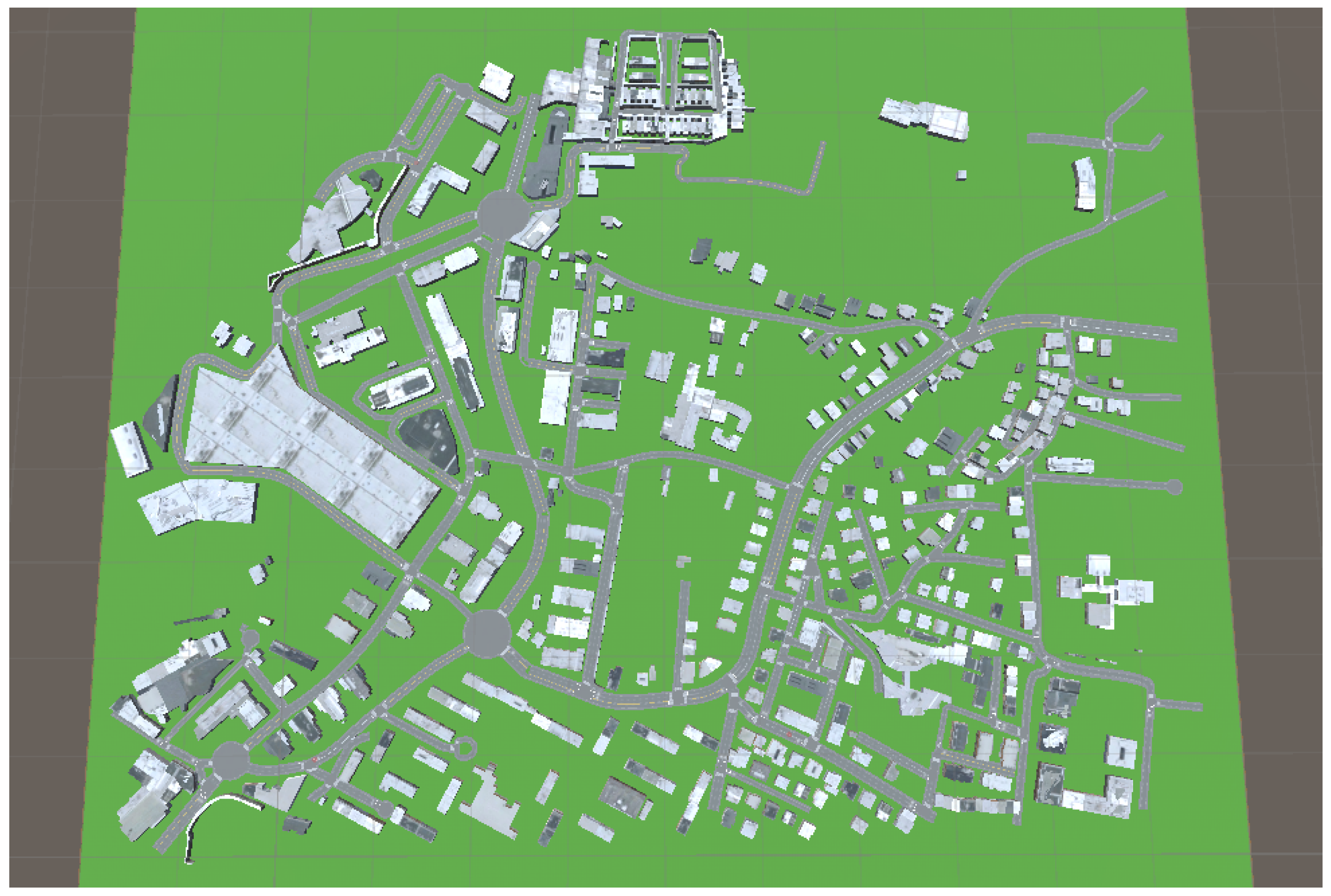
At this stage, the test environment incorporates a map modeled after the real-world geography of a section of Vila Real, Portugal (
Figure 4). This environment provides a robust foundation for testing DRL models in a more realistic context, introducing geographical complexity that closely mirrors real-world scenarios.
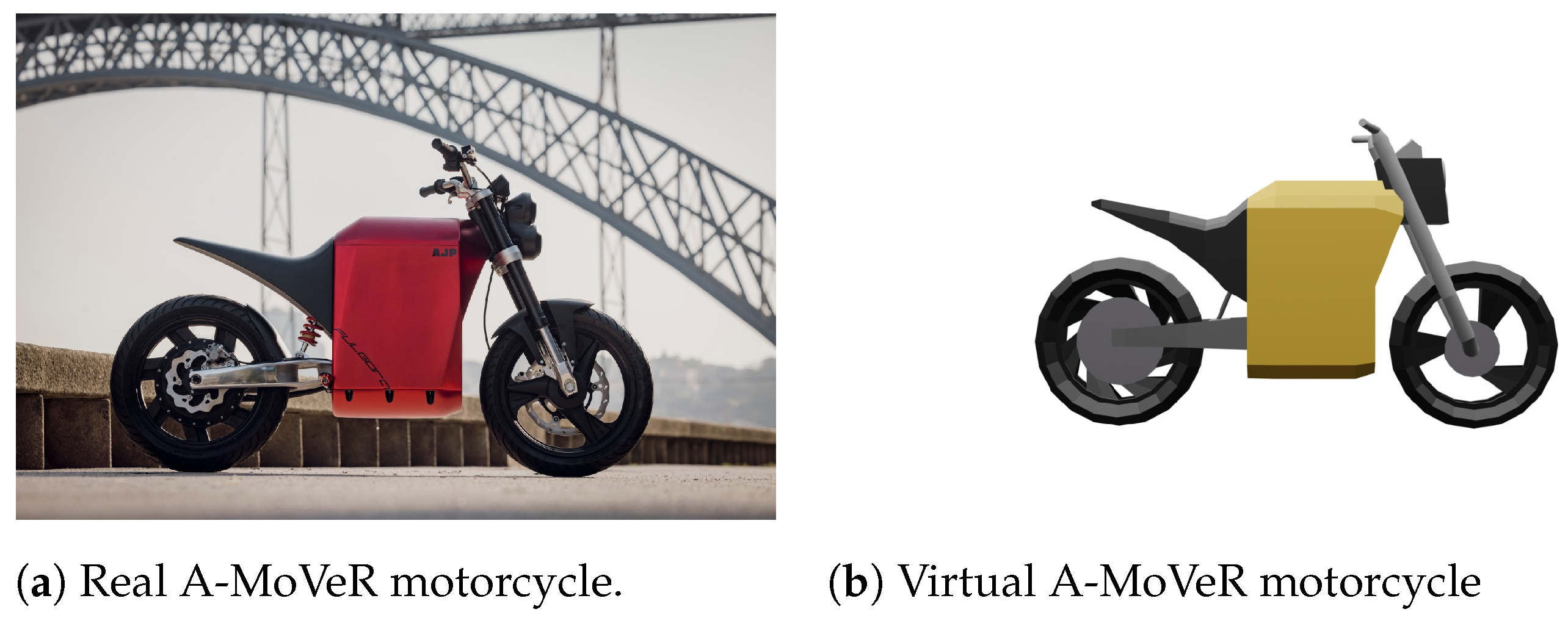
In addition to the map, we have introduced a new agent—a motorcycle instead of a car. This motorcycle is modeled after the real vehicle used in the A-MoVeR project (see
Figure 5, where the virtual and real motorcycle are shown side by side). By implementing this specific vehicle, we have added a layer of complexity to the simulation, as the physics related to the motorcycle’s movement are more intricate, requiring the agent to navigate with realistic speed, balance, and control. This step allows for a more accurate simulation of our real-world objectives, ensuring that the virtual tests are aligned with the physical performance of the A-MoVeR motorcycle (see
Figure 6, where the motorcycle is navigating on the new environment).
Furthermore, in a more advanced phase of the project, various obstacles will be randomly distributed throughout the map, requiring the agent to learn how to overcome them. These obstacles will introduce additional challenges to the simulation, reflecting real-world conditions where vehicles must navigate through unpredictable environments. This evolution will further test the adaptability and learning efficiency of the DRL models, pushing them closer to real-world driving scenarios.
4. Results
4.1. Overview
Given the intrinsic differences in PPO and SAC complexity and update mechanisms, it is anticipated that SAC, which leverages memory from different steps to update its policy, should require a longer training period compared to PPO. However, this extended training time is expected to yield superior results, with SAC achieving optimal behavior more efficiently in terms of performance metrics. Conversely, PPO is expected to train more rapidly, but is projected to need a greater number of steps to reach optimal performance. This expectation arises from the inherent design of PPO, which focuses on simplicity and rapid iteration but may compromise on the speed of convergence to optimal behavior.
The results of these algorithms are analyzed using TensorBoard, provided by ML-Agents, which offers a comprehensive visualization of the training metrics. This analysis helps in understanding the convergence patterns, stability, and overall performance of the algorithms, allowing for a detailed comparison of their effectiveness in various scenarios.
4.2. Results Analysis
In the current phase of our project, where the objective is for the car to reach the target regardless of its position on or off the road, we have observed promising yet imperfect results. The car is generally successful in reaching the target with PPO, demonstrating its capability to learn and adapt effectively to the task. However, with SAC, the car rarely reaches the target, indicating significant challenges in its learning process.
The following analysis presents a comprehensive comparison of various metrics for PPO (represented in purple) and SAC (represented in orange). The actions in this experiment were implemented as continuous, and the training was conducted over 8 million steps. These visualizations provide valuable insights into the performance, stability, and learning efficiency of the two algorithms under the specified conditions. Additionally,
Table 2 is presented, comparing key metrics between both algorithms.
Training Time
As anticipated, the training duration for PPO was 13.6 h, while SAC required a significantly longer training period of 1.541 days. This disparity in training times highlights the differences in the complexity and update mechanisms of the two algorithms.
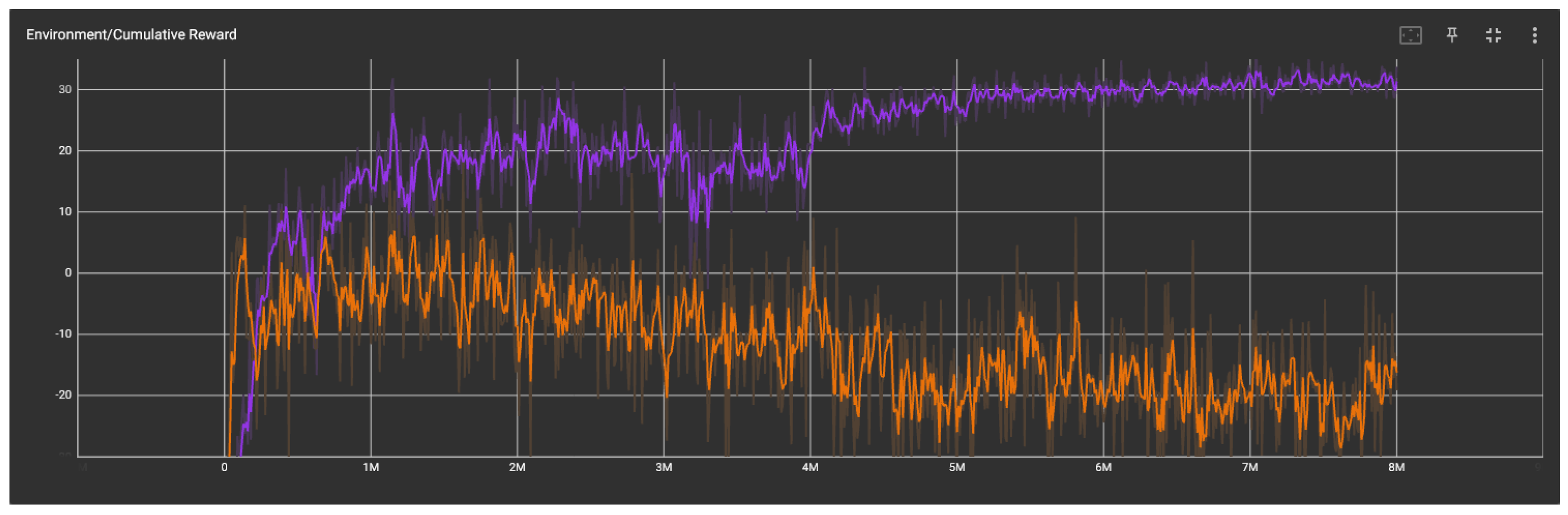
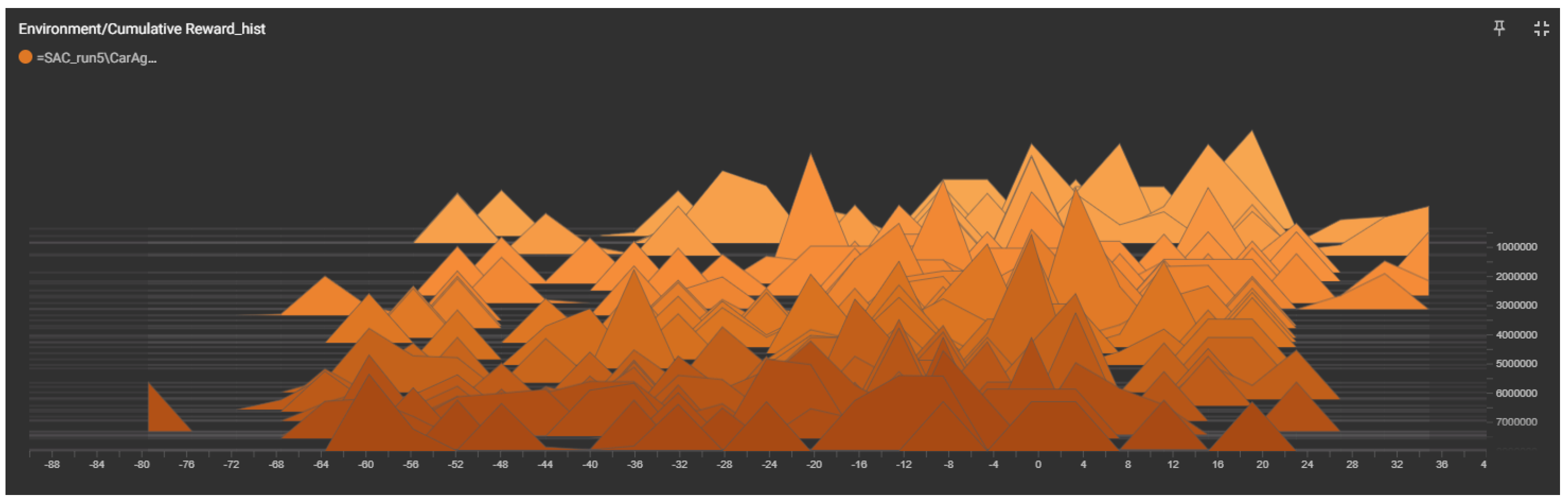
Cumulative Reward Trend
The graph in
Figure 7 illustrates the cumulative reward over time for PPO and SAC. The cumulative reward for PPO starts low but shows a consistent upward trend, stabilizing around a cumulative reward of 30 after approximately 3 million time steps. The curve is relatively smooth with some early fluctuations but becomes more stable as training progresses. In contrast, the cumulative reward for SAC starts low and initially rises but stabilizes at a much lower level compared to PPO. The SAC curve shows significant fluctuations throughout the training period, oscillating around −10 to 0 without a clear upward trend after the initial increase.
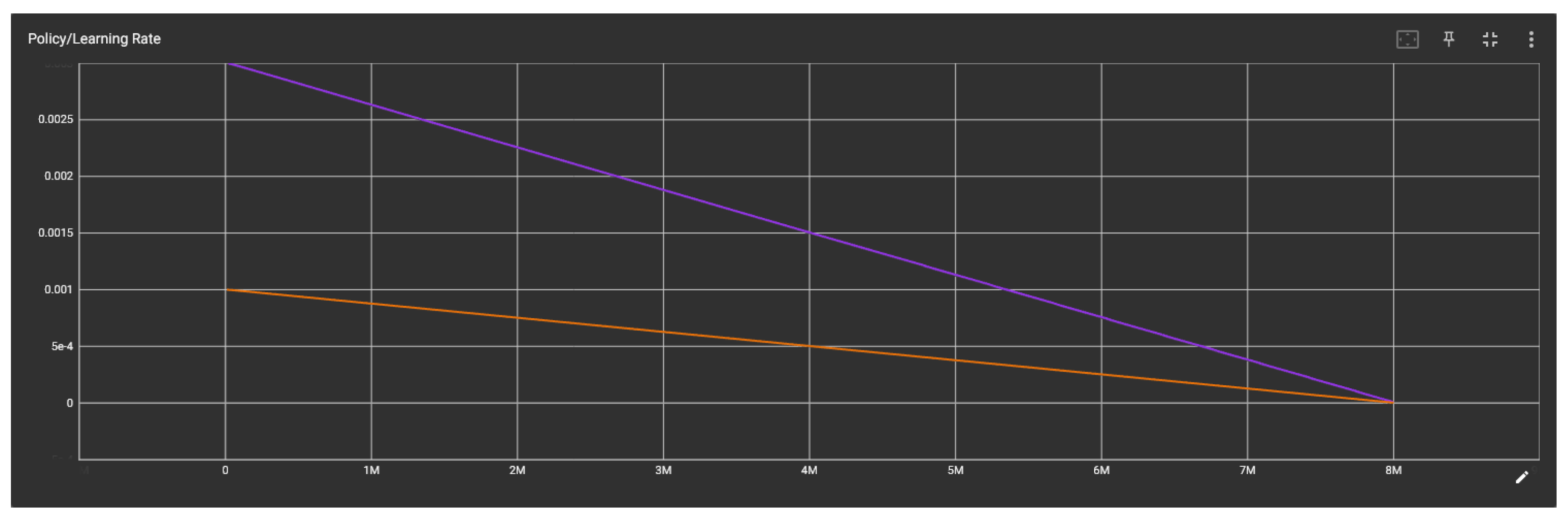
Learning Rate
Figure 8 shows the policy learning rate over time for both PPO and SAC. PPO starts with a higher learning rate that decreases more rapidly compared to SAC. This indicates a more aggressive learning approach initially, which then stabilizes as training progresses.
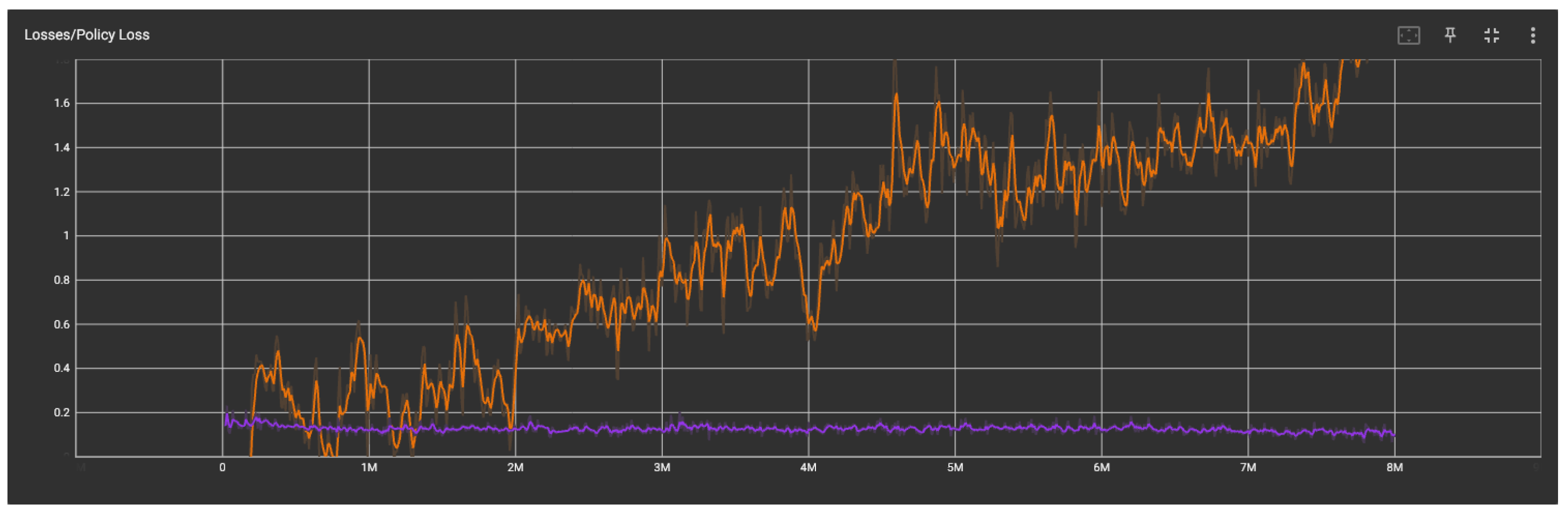
Policy Loss
The policy loss over time for both algorithms is shown in
Figure 9. PPO maintains a consistently low policy loss throughout the training period, indicating stable policy updates. On the other hand, SAC exhibits a high and increasing policy loss, suggesting instability and inefficiency in policy updates.
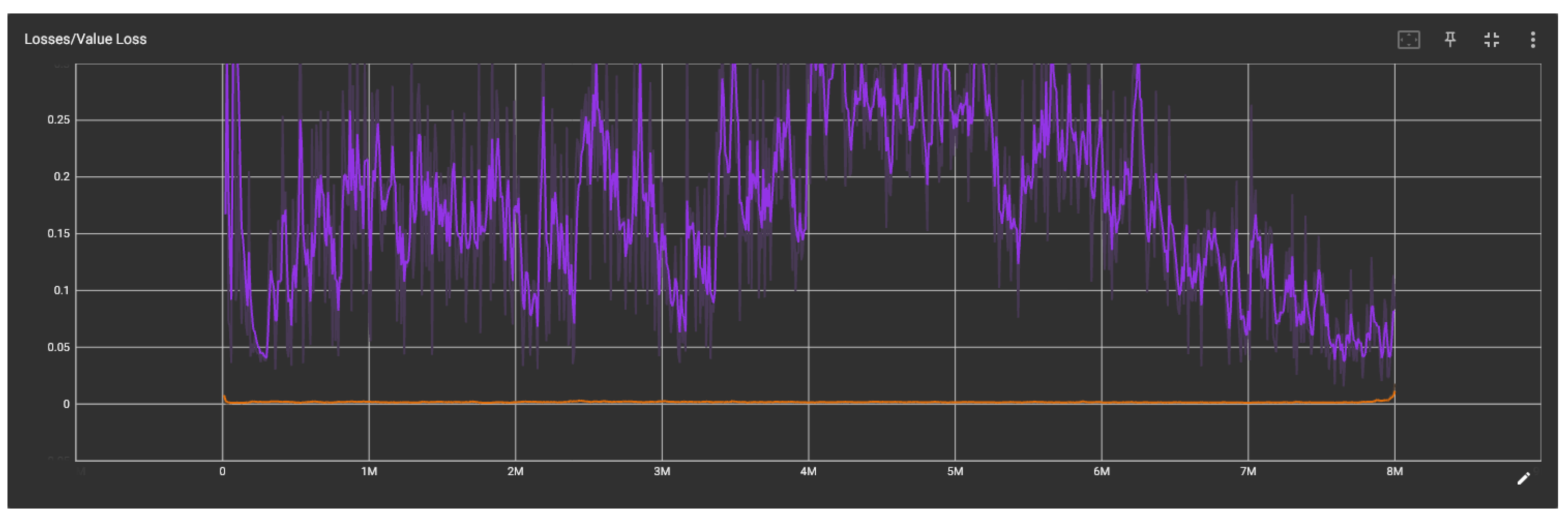
Value Loss
Figure 12 illustrates the value loss over time for both algorithms. PPO maintains a relatively low value loss with some fluctuations, whereas SAC shows a consistently low value loss, indicating different stability characteristics.
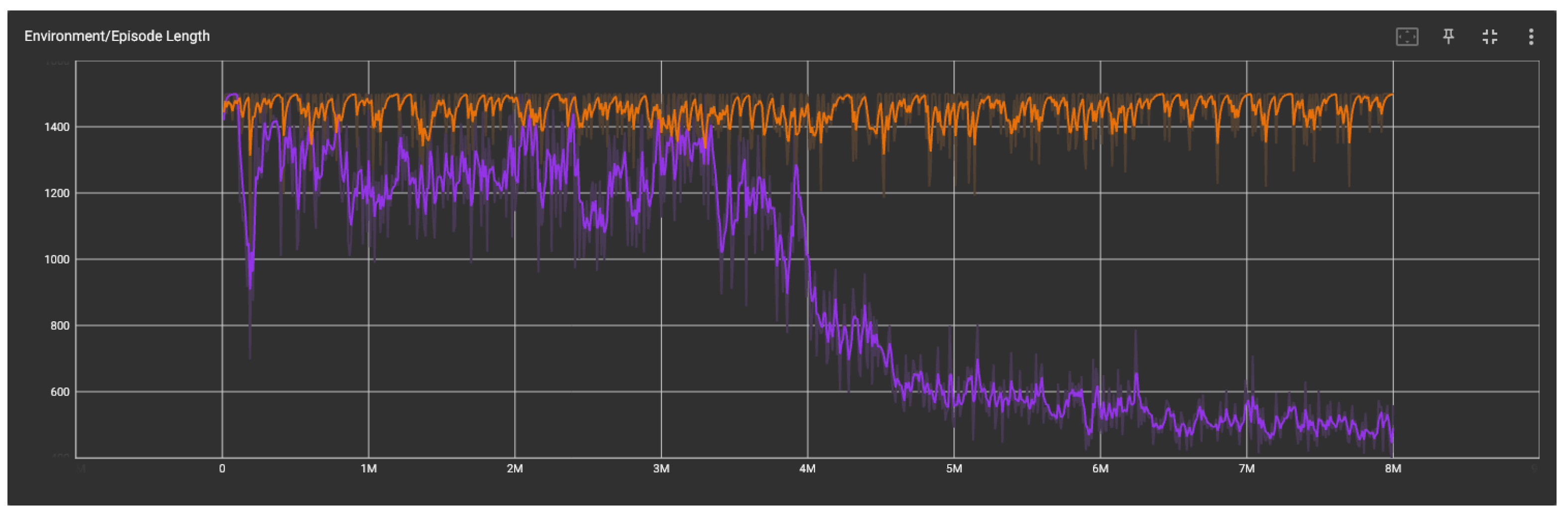
Episode Length
The episode length over time is depicted in
Figure 13. PPO shows a decreasing trend in episode length, stabilizing at a lower value, which suggests efficient learning and faster convergence to the target. SAC, however, maintains a relatively high and stable episode length, indicating inefficiency in learning to reach the target.
The results suggest that PPO is more suitable for this environment or task, given its higher and more stable cumulative reward, as well as its faster training time. SAC, while trained for a longer period, did not perform as well, indicating the need for more fine-tuning or a different approach to parameter optimization. In summary, PPO outperforms SAC in terms of cumulative reward, stability, convergence, and training efficiency in this continuous action implementation scenario.
For future tuning, adjustments will be made to the parameters, observations, and other aspects of the training process. These changes aim to improve the performance and stability of both algorithms, with a focus on maximizing cumulative rewards and reducing variance.
5. Conclusions
This work demonstrates promising advances in the application of DRL for autonomous navigation within the Unity engine. Despite some imperfections, the car generally succeeds in reaching its target, highlighting the potential of DRL to enhance decision-making and adaptive behavior in dynamic gaming environments.
The initial phase of our project underscores the effectiveness of the Unity engine and ML-Agents Toolkit as a robust platform for testing and refining AI methodologies. These tools have provided a controlled yet dynamic environment that closely mimics real-world scenarios, facilitating rapid iteration and comprehensive analysis of DRL techniques. This foundational work sets the stage for future phases of the project, where increased complexity will further challenge and enhance the car’s navigational capabilities.
Our results indicate that PPO has been successful in learning to reach the target, achieving higher and more stable cumulative rewards. In contrast, SAC has not been as successful, struggling to reach the target and showing significant variability in performance. This comparison highlights PPO’s suitability for the current task and environment, with SAC requiring further fine-tuning and parameter optimization.
Beyond the gaming context, this research directly contributes to the A-MoVeR project, where we focus on optimizing route planning and energy management for autonomous motorcycles. The insights gained from simulation—such as efficient navigation strategies and handling real-world constraints—support the development of advanced decision-making models for route optimization and energy consumption prediction. These contributions align with the project’s goals of providing effective logistical services for users.
Moving forward, the project will evolve through additional phases, each introducing more complex scenarios to push the boundaries of the car’s learning and adaptability. Future tuning will involve adjustments to parameters, observations, and other aspects of the training process to improve the performance and stability of both algorithms. These changes aim to refine the reward system further, ensuring a balance between immediate rewards and the efficiency of reaching the target. Additionally, in future work, we will consider exploring and comparing other machine learning algorithms commonly used in similar fields, to further contextualize the performance and adaptability of PPO and SAC in these scenarios.
Overall, the results thus far affirm the potential of DRL in developing sophisticated, autonomous agents capable of real-time learning and adaptation. This research not only contributes to the field of gaming AI but also paves the way for broader applications of autonomous systems in real-world scenarios, enhancing their interaction dynamics and realism. The promising outcomes of this project highlight the importance of continued exploration and refinement of AI techniques, with the ultimate goal of revolutionizing autonomous systems’ adaptability and efficiency in complex environments.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}