1. Introduction
Temporal graphs are dynamic graphs that can change over time. Edges and Vertices in a temporal graph may evolve over time and thus have temporal information associated with them. Temporal graphs can be used to model many real-world problems such as modeling the spread of viral diseases, traffic flow in road networks, information flow in social networks and other such problems representing dynamic connectivity [
1,
2,
3,
4,
5,
6,
7]. Recently, temporal graphs have been used in machine learning as temporal graph neural networks (
s) [
8].
Different models can be used to represent a temporal graph [
3]. One such popular model is a contact sequence temporal graph (
). Every instance of time when a communication can be initiated from a vertex
u to a vertex
v is represented by a unique temporal edge
in the
model.
t is the departure time and
is the travel time along this edge, such that the arrival time at
v when departing
u along this edge would be
.
Figure 1 shows an example of a
.
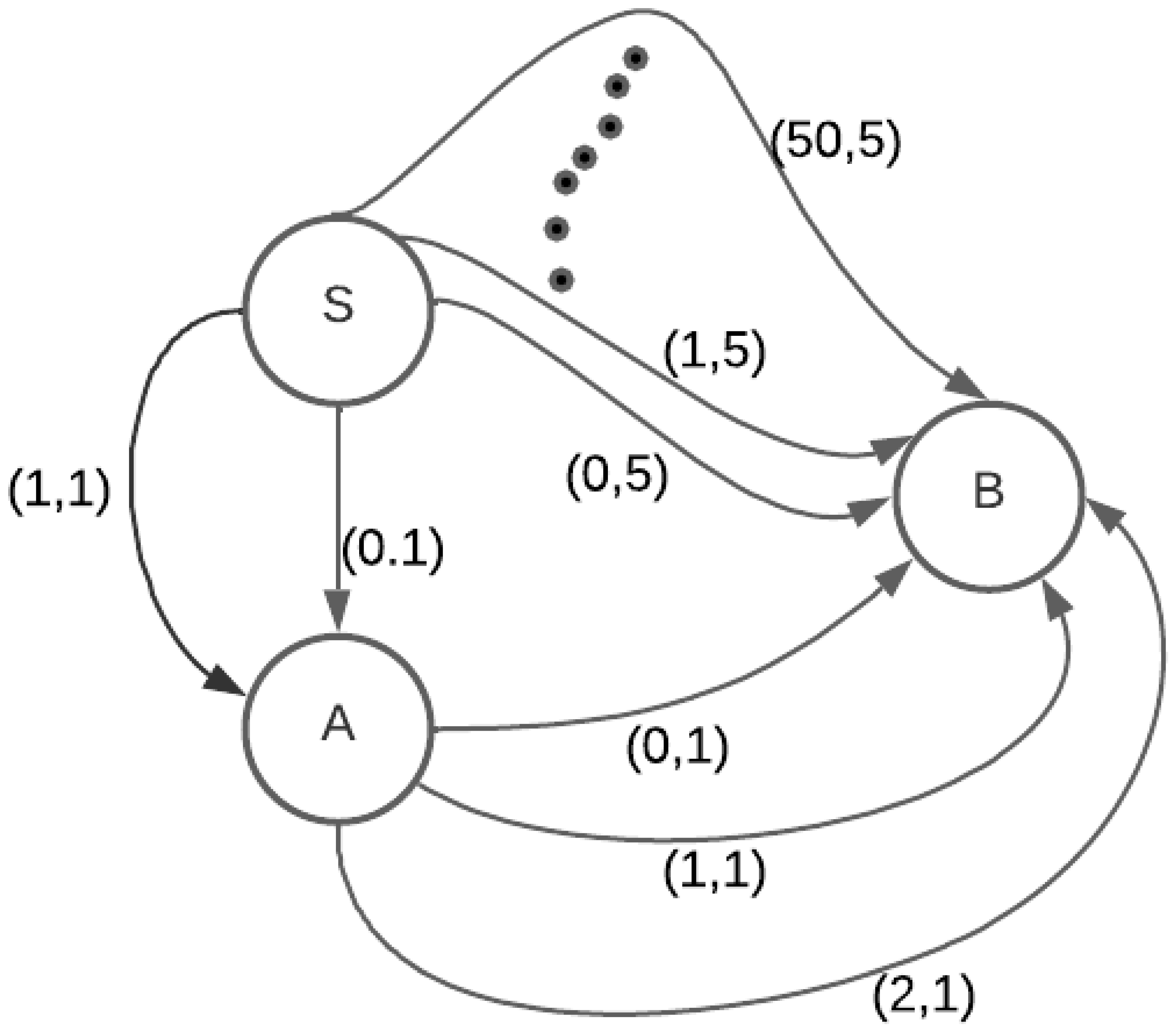
An alternate representation of a temporal graph is an interval temporal graph (
). Temporal information on an edge connecting two vertices
in an
is modeled as a vector of contiguous time intervals
, with an associated travel time
for each interval
i.
Figure 2 illustrates an example of an
. Communication from
u to
v may be initiated at any time
t such that
for one of the intervals
i along this edge.
While every CSG has an equivalent ITG, the reverse is true only when time is discrete.
Some applications of temporal graphs are described below:
Intelligent Transportation Systems—Road networks can be modeled by temporal graphs where vertices represent street intersections [
9]. Varying traffic and street conditions are represented as temporal edges. Such temporal graphs enable building intelligence in transportation systems to improve safety, mobility and efficiency.
E-health and bioinformatics—Temporal graphs can be used to model pandemic spread by building proximity networks [
10,
11,
12]. This kind of modeling can help understand the source of pandemic spread and the best methods to contain the pandemic spread.
Social Networks—Social networks are usually large dynamic graphs. Refs. [
1,
13] present a framework for modeling social networks. Santoro et al. [
5] propose an approach for studying temporal metrics in social graphs using temporal graphs.
Artificial Intelligence—Graph Neural Networks (GNNs) have become popular in recent times due to their ability to learn complex systems of relations or interactions. They provide a framework for deep learning models on graphs. Recently, new frameworks have been proposed for deep learning on dynamic or temporal graphs. For example, Rossi et al. [
8] propose a framework for deep learning on temporal graphs that they call Temporal Graph Networks (TGNs). Smith et al. [
14] propose a novel architecture for online learning with temporal neural networks.
Path and walk problems on temporal graphs are studied, for example, in [
9,
15,
16,
17,
18,
19,
20]. While [
16,
18,
19] focus on
s, Refs. [
15,
17,
20,
21] use the
model. Wu et al. [
15] demonstrate that the studied path problems can be solved faster using the algorithms proposed by them on the
representation when compared to the algorithms proposed on the
representation by Xuan et al. [
16]. However, Jain et al. [
18,
19] subsequently developed algorithms for
s that outperform the
algorithms of Wu et al. [
15] for most of the studied path problems as well as the ITG algorithms of Xuan et al. [
16]. Gheibi et al. [
20] proposed an alternate TRG data structure for representing
s that results in faster algorithms than the algorithms of Wu et al. [
15] for most of the studied path problems.
Bentert et al. [
17] developed a polynomial time algorithm, for
s, to compute walks that optimize any linear combination of the optimization criteria studied by [
15,
16,
18,
20] with min and max waiting time constraints at each vertex. Jain et al. [
19] show that a linear combination of multiple criteria can be used to find walks and paths with a secondary optimization criterion for, e.g., min-hop foremost (
) paths or min-wait foremost (
) walks.
Jain et al. [
19] present algorithms for dual criteria
(
) and
(
) for
s. Their ITG algorithms solve the
and
problems in less time than when the algorithm of Bentert et al. [
17] is used on the corresponding CSGs and the coefficients of the linear combination optimization criteria in Bentert et al.’s algorithm are chosen so as to compute
and
walks. Jain et al. [
21] also develop an algorithm to compute walks optimizing any linear combination of the criteria considered by Bentert et al. [
17] with waiting time constraints, outperforming the algorithm by Bentert et al. by up to a factor of 77. However, the limitation of the algorithm by Jain et al. is that it only works on
s with no zero-duration cycle.
In this paper, we develop an algorithm to find the shortest paths in
s. A shortest path between any two vertices
A and
B in a temporal graph is a feasible path for which the travel time to reach from
A to
B is minimum. Xuan et al. [
16] propose a polynomial time algorithm to find min-hop paths in
s. A min-hop path from vertex
A to
B is a feasible path that travels through the minimum number of edges to reach
B. Such a path is also the shortest path from
A to
B when all edges have the same travel time. However, in general, travel times on the edges of an interval temporal graph may be different. No algorithm has been proposed for finding the shortest paths when the temporal graph is expressed as an
. Wu et al. [
15], Bentert et al. [
17], Jain et al. [
21] and others proposed algorithms that can be used to find the shortest paths when temporal graphs are expressed as
s. As noted earlier,
s cannot be expressed as
s when time is continuous. Further, even when time is discrete, the size of the
corresponding to a given
could be quite large (when the time intervals of edges are large). This paper fills this gap by providing a polynomial time shortest path algorithm for
s.
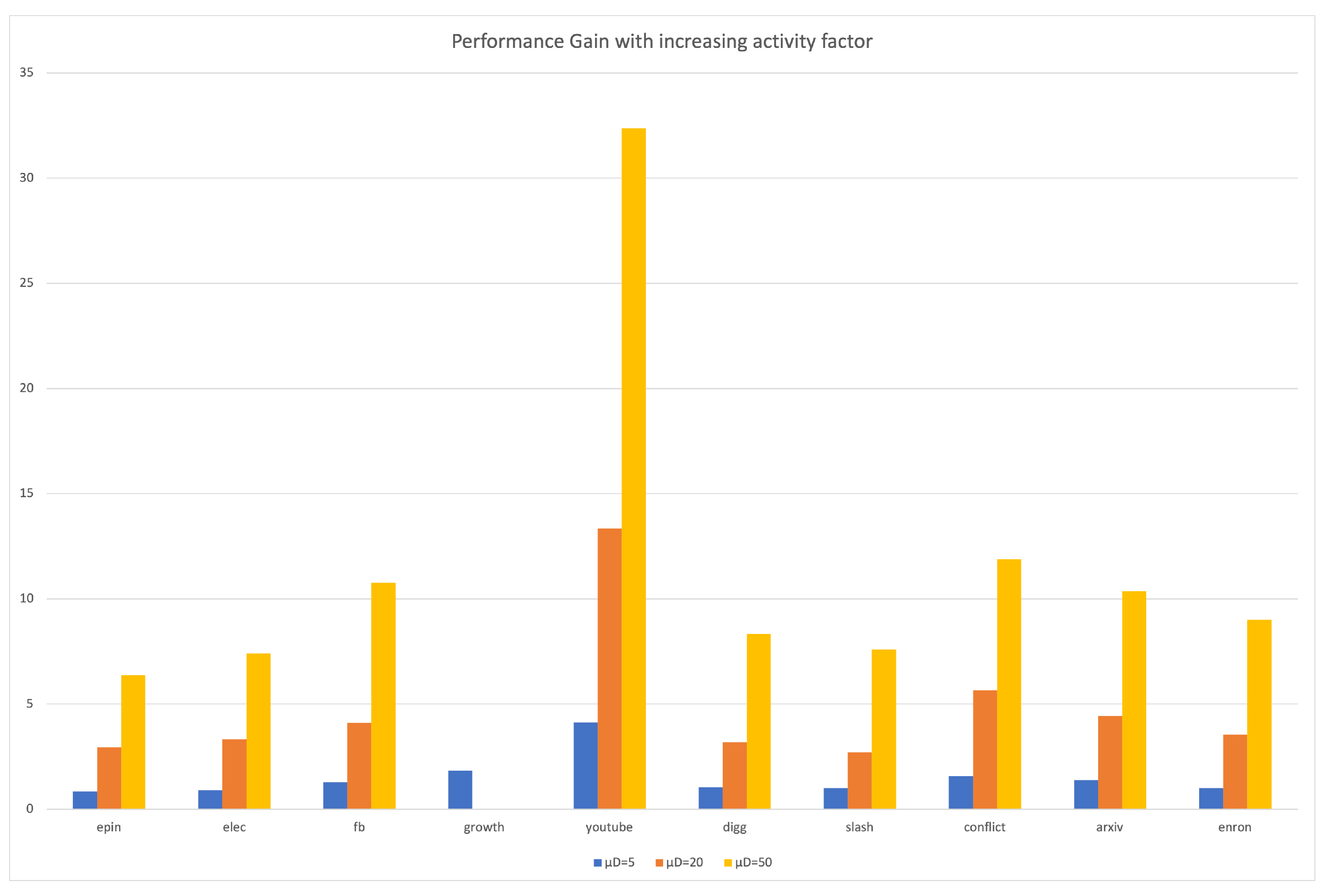
Experimentally, it is demonstrated that as the contiguous time intervals that allow travel on edges in temporal graphs become larger, our
shortest path algorithm shows increasing performance gains over the algorithm by Wu et al. [
15] running on the same temporal graph expressed as a
.
Our main contributions are as follows:
We develop a polynomial time algorithm to find the shortest paths in an . To the best of our knowledge, no such algorithm is presently available in the literature.
We provide the complexity analysis of our shortest path algorithm.
We benchmark our algorithm for
s against that of Wu et al. [
15] for finding the shortest paths in
s. Experimentally, we show that as the activity factor in a temporal graph increases due to large contiguous travel intervals, our algorithm shows increasing performance gains over that of Wu et al. [
15] on equivalent temporal graphs expressed as
s. Using synthetic datasets, we show that our algorithm for
s obtains a speedup of up to
relative to the state-of-the-art algorithm for
s.
3. Shortest Paths
We need to find the shortest paths p from a start vertex s to all possible destination vertices in a given .
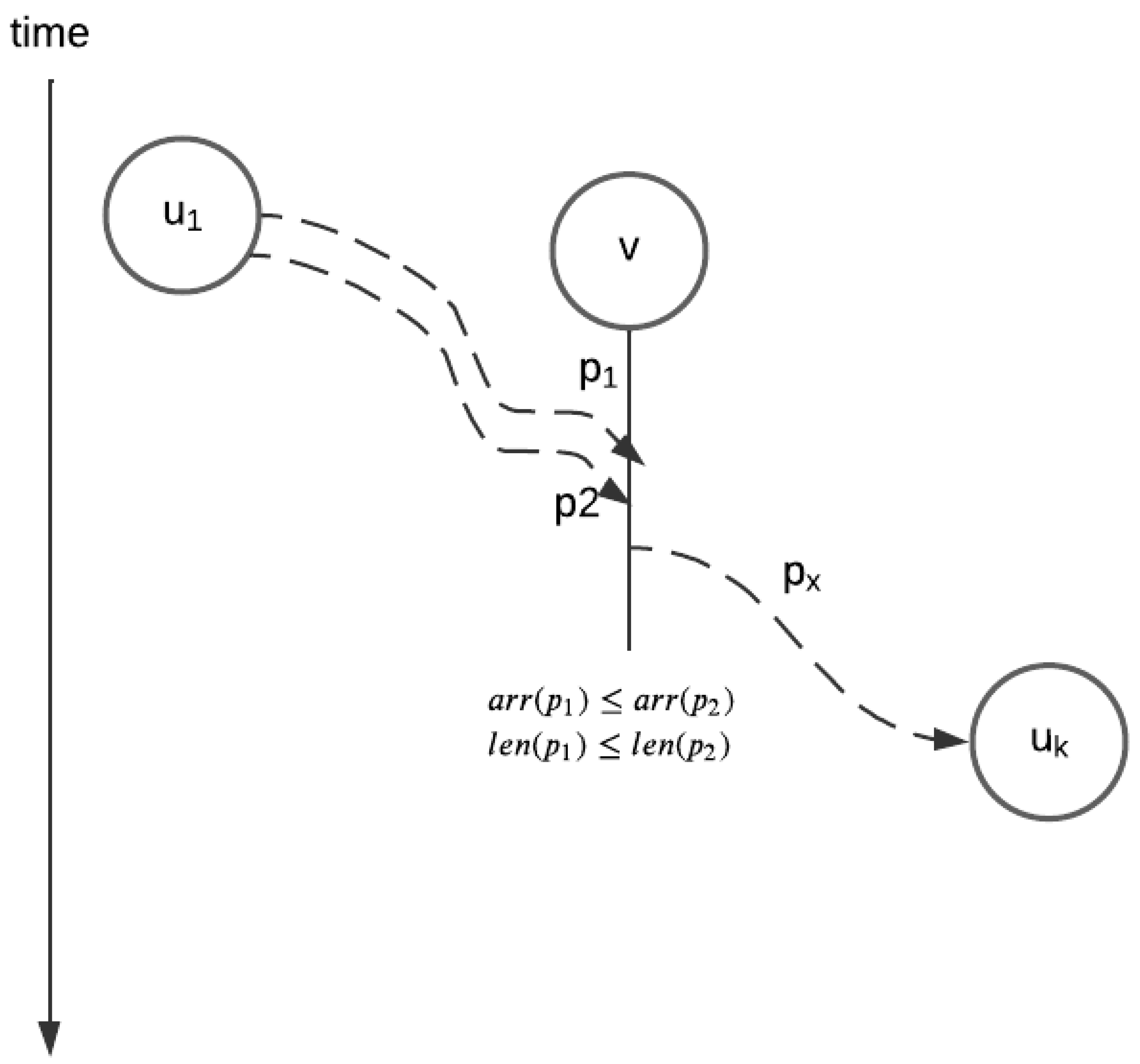
3.1. Dominance Criteria
Let
and
be two paths from the start vertex
s to the same end vertex
v. We say that
dominates
iff every valid extension of
is also a valid extension of
and has the same or smaller length. A valid extension of a path
p from
s to
v is a valid path
from
s to
, such that
goes through
v and is the same as
p from
s to
v. Let the arrival time and length of a path
p from
s (to its end vertex) be denoted by
and
, respectively. It is easy to see that when Equation (
2) is true,
dominates
(see
Figure 5).
When the arrival times and lengths of the paths
and
are as in Equation (
3), then neither of the paths dominates the other. When neither path dominates the other, we say that
and
are
pairwise non-dominant.
3.2. Algorithm
We propose a hop-by-hop algorithm to determine a shortest path from a start vertex s to all possible destinations in an . At every hop count k, we construct a list of non-dominated paths from s to every reachable vertex v by extending the list of such paths for hop count . The algorithm terminates after a maximum of hops, where n is the total number of vertices in the or when no new non-dominated paths are discovered in a given hop.
3.3. Overview
Let be the list of pairwise non-dominant r-hop paths from s to v that arrive at v at time t and have length l, ; the paths are in increasing order of t (equivalently, decreasing order of l). Let be the list of non-dominated k-hop paths from s to v. A high-level description of our shortest paths algorithm can be found in Algorithm 1.
The lists
and
are initialized in lines 1 and 2 to be lists of 0-hop paths from
s to
v. The
-hop paths in
are extended to
k-hop paths by adding an outgoing edge
in lines 8 and 10. Line 8 considers one edge extensions that use the interval
for the case
. Of the possible extensions using this interval, the one that departs
u at time
dominates the others and so only this one is added to
. Line 10 considers the remaining case for a legitimate extension,
. Again, only the single non-dominated extension is added to
. Line 13 removes dominated paths from
. In Line 14, the paths in
and
are merged to obtain
(recall that
is to contain only non-dominated paths). Additionally, paths in
that are dominated by a path in
are eliminated from
.
| Algorithm 1 Shortest Paths Pseudocode |
- 1:
; - 2:
; - 3:
for
do - 4:
- 5:
for every edge do - 6:
for all do - 7:
add - 8:
to - 9:
If there is an i, such that , add - 10:
to - 11:
end for - 12:
end for - 13:
, eliminate dominated paths from - 14:
, merge and to get eliminating dominated paths from as well as paths in that are dominated by paths in - 15:
, - 16:
If terminate! - 17:
end for - 18:
return shrtstP[]
|
3.4. Pseudocode Example Walk-Through
We will walk through the pseudocode in Algorithm 1 with an example graph of
Figure 6. We are to find the shortest paths from
s to all destination vertices
in
Figure 6. The lists
and
are initialized as ⌀ in lines 1 and 2 for
as 0-hop paths.
and
are initialized as
.
In hop 1,
. The condition in line 5 evaluates to true only for the edge
. Therefore, lines 6 to 11 add two new paths to
as
, extending
along the two available intervals on edge
. Line 13 eliminates the path
from
as it is dominated by the path
as per Equation (
2). Merging
with
in line 14 gives
.
In hop 2, . Line 5 evaluates to true for edges and since . Hence, is extended along each of these edges in lines 6 to 11.
- (a)
Extending along the two intervals on edge gives
- (b)
Extending along the two intervals on edge gives
Line 13 eliminates the dominated path from , whereas none of the paths are dominated in . Lists and are merged with and , respectively, in line 14. Therefore, at the end of this iteration, and .
.
In hop 3, . We have and as non-empty. Therefore, line 5 evaluates to true for edges and .
- (a)
Extension of paths in along the intervals on edge gives .
- (b)
Extension of paths in along the intervals on edge appends to . Therefore, .
Line 13 eliminates the dominated paths from . Therefore, the paths surviving are . After merging with in line 14 we obtain, . .
Line 5 does not evaluate to true for any other edges when , as even though is non-empty, there are no outgoing edges from d. Therefore, the algorithm terminates. The shortest paths to each of the vertices are available in the array .
3.5. Detailed Algorithm
Algorithm 2 is a refinement of Algorithm 1 that provides a greater level of detail.
The function
(line 12 of Algorithm 2) finds the earliest possible departure time
and corresponding interval
on the edge
. If
t is in the interval
,
is the same as
t, otherwise it is
. The lists of paths
arriving at a vertex are always kept in increasing order of
t. In a list of non-dominated paths, the increasing order of
t is the same as the decreasing order of
l due to the dominance criteria of
Section 3.1. In line 17,
prepends extended path
to the list
since paths
from the predecessor vertex
u are extended in decreasing order of
t. After prepending
to
,
eliminates any subsequent paths in the list that
dominates.
In lines 11 to 24, every is extended using an outgoing edge and the earliest possible departure time () from u. Then, is also extended at for every subsequent interval i on , such that , where is the extension time of a previously examined path at u. This is because extension of would be dominated by the extension of if it starts at with the same travel time since .
In line 25, the list of extensions of all paths from
u to
v is merged with any other such list from a different incoming edge
in the current hop, retaining only non-dominated paths. The resulting
is added to
, which maintains all such lists obtained at every vertex
v in hop
k.
| Algorithm 2 Shortest Paths Detailed Algorithm |
- 1:
Initialize , ; - 2:
Initialize as empty list. . - 3:
, ; - 4:
Add to - 5:
Initialize ; - 6:
while and do - 7:
; - 8:
for all u in do - 9:
for all neighbors v of u do - 10:
Initialize - 11:
for all in dec order of t do - 12:
- 13:
if then - 14:
continue - 15:
end if - 16:
- 17:
prpendDom() - 18:
for - 19:
do - 20:
- 21:
insrtDom() - 22:
end for - 23:
- 24:
end for - 25:
addOrmerge(,) - 26:
end for - 27:
end for - 28:
for all u in do - 29:
- 30:
- 31:
- 32:
if then - 33:
- 34:
end if - 35:
end for - 36:
- 37:
- 38:
end while - 39:
return
|
Finally, in line 30, all at every vertex u available in , are evaluated against their respective to obtain the non-dominated paths in hops 1 through k as and the new paths in current hop as .
The algorithm continues until the terminating conditions are met.
Theorem 1. Algorithm 2 finds the shortest paths from the start vertex s to all reachable vertices v.
Proof. In an
n-vertex temporal graph, a shortest path from a start vertex
s to any destination vertex
v is a non-dominated path with
hops. In Algorithm 2, we examine all non-dominated paths starting from
s and keep a record of the shortest path discovered in line 31. Due to our scheme of resolving the ties described in
Section 3.2, any walks with cycles are eliminated as these are dominated by paths that have no cycles and have fewer hops. Therefore, the shortest path obtained is a shortest valid path with no cycles. □
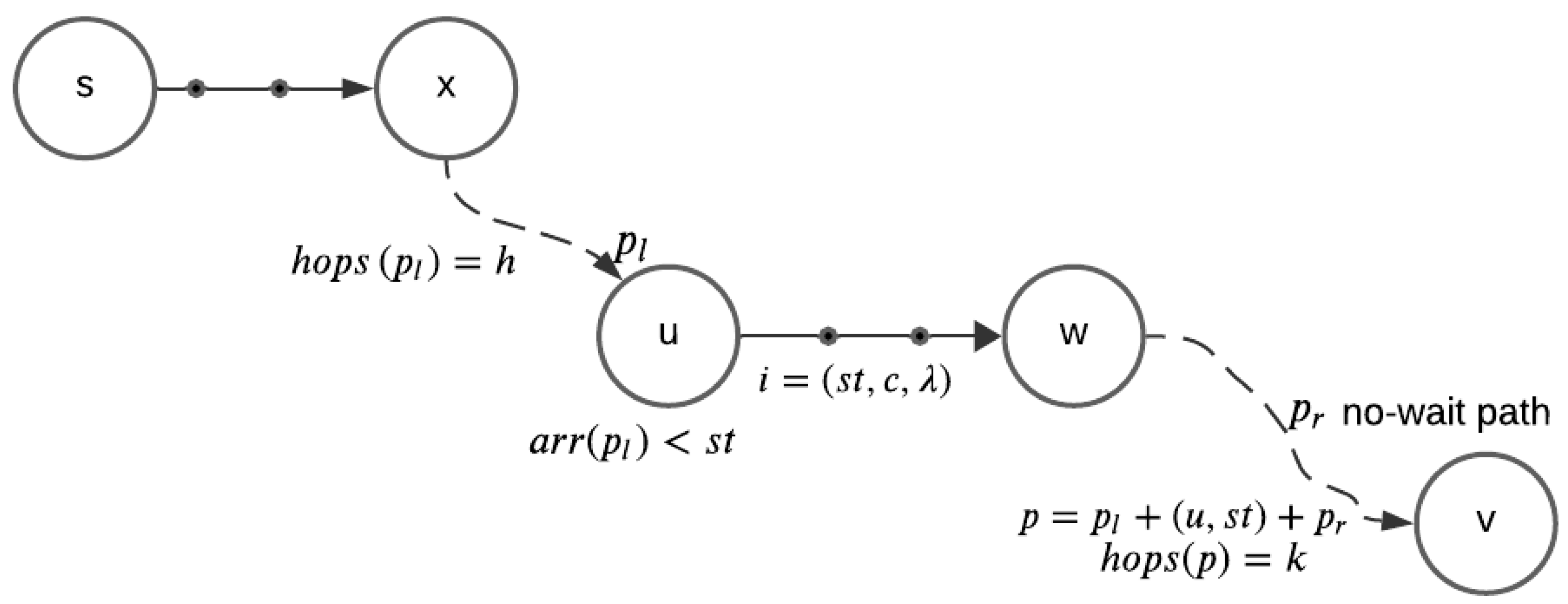
3.6. Complexity Analysis
We may associate a label
with each path
,
, and
, where
is the id of the last edge,
, in
p with a departure time that is the start,
, of some travel interval of
and
h is the number of hops in the path
p from
s to
u. Note that every
has such a
as the departure time for the first edge
of
p is the start of some interval of
and the number of edges in
p is finite. Let
be the portion of
p from
s to
u and
that from
u to
v (see
Figure 7). From the way our algorithm works, it follows that
is an
h-hop path in
. Further, since the departure time for no edge in
is a start time of a travel interval for that edge (except
on
),
encounters no wait at intermediate vertices and the length,
, (i.e., sum of the edge travel times) of
is the same as its duration (arrival time at
v - departure time from
u).
Theorem 2. No has two paths with the same label.
Proof. Assume there is a that has two paths and with the same label . We shall show that this assumption leads to a contradiction and so must be false. Note that and are pairwise non-dominant.
Case . Now, and are empty. Thus, and . When , we have . Thus, dominates , which contradicts the fact that and are pairwise non-dominant. A contradiction is similarly obtained for the cases and .
Case
. Now,
and
are
h-hop paths from
s to the same vertex
u. The first edge of
and
is
and both these paths start from
u at time
. Thus,
- (a)
Case
. Now,
and
must be the same path as, otherwise, one dominates the other, which is not possible as both are in
. If
, then
(Equations (
4) and (
5)). Thus,
(Equations (
6) and (
7)). Hence,
dominates
, a contradiction. A similar proof shows that when
, we obtain the contradiction that
dominates
.
- (b)
Case
. Let
be the
s to
v path obtained by concatenating
and
. Note that
is a
k-hop time-respecting path with
and
(Equation (
7)). Hence,
dominates
. Thus, either
or a path
that dominates both
and
must be in
. This means that
cannot be in
.
- (c)
Case . This is similar to the previous case.
□
Theorem 3. No has two paths with the same label.
Proof. This is similar to that of Theorem 2. □
The number of distinct path labels is at most , where i is the total number of travel intervals across all edges of the temporal graph. From Theorems 2 and 3, it follows that and for all v and k.
For each value of k, , the at most paths in are considered in increasing order of length (equivalently, decreasing order of arrival time at u) and extended by one hop using an out edge from u. When extending using the edge for each of these up to paths, a binary search is performed over the travel intervals of this edge to determine the first interval for a valid extension (line 12 of Algorithm 2). The remaining (larger start time) intervals are then examined serially until the first interval that has already been used for the extension of a previously considered path in is encountered. Let be the maximum number of travel intervals on any edge. We see that time is spent performing the binary searches for the up to paths and time in examining the remaining intervals. The total time to process is therefore (note that ). The number of k-hop paths generated by extending the paths in using the edge is .
To compute , we need to compute a list of extensions of the paths in for all u such that is an edge of the temporal graph and merge these lists together, eliminating dominated paths. There are at most such path lists to be merged. Each of these has paths and takes time to compute. The time needed to compute all of these lists is therefore . Pairwise merging these path lists takes time (note that during the pairwise merge of two path lists, dominated paths are eliminated, so, from Theorem 3, it follows that the list size remains ; two ordered path lists may be merged in linear time eliminating dominated paths). An alternative to pairwise merging of the path lists is to merge the lists simultaneously using a loser tree. This reduces the merging time to . Regardless, the total time needed to compute is . Hence, for any k, all s may be computed in time, where is the number of edges in the temporal graph.
For any k and v, may be merged with , eliminating dominated pairs from both lists in time as both lists are ordered by arrival time and of size (Theorems 2 and 3). Thus, the overall time taken by Algorithm 2 for each k is and the time over all ks is , which is polynomial in the number of inputs.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}