
Automatic Determination of Secondary Dendrite Arm Spacing in AlSi-Cast Microstructures

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Binarization
2.2. Object Segmentation
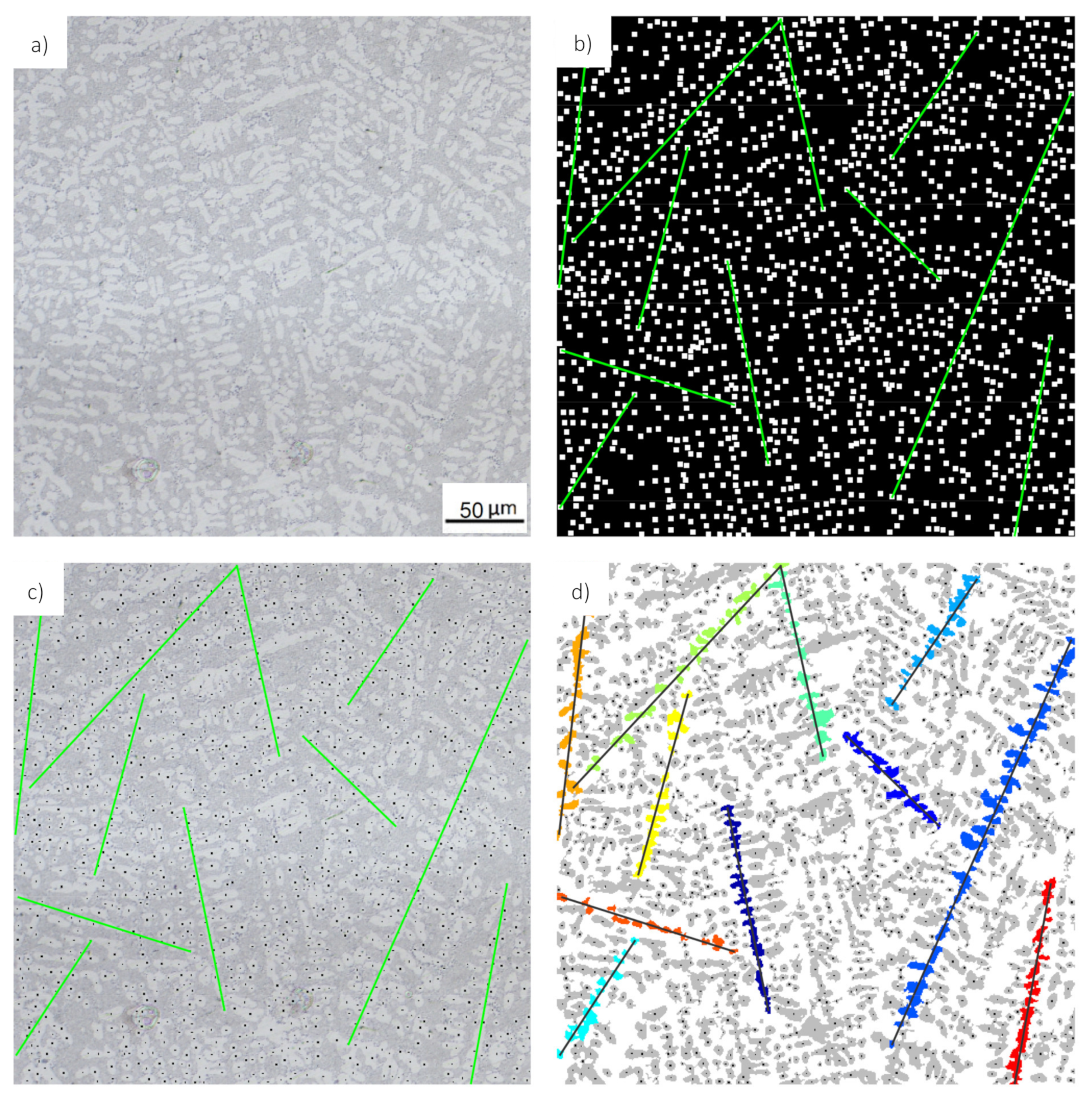
2.3. Object Grouping and Cluster Scoring
- A suitable cluster should be composed of a minimal number of objects.
- The distributions of distances between the individual objects should be as homogeneous as possible for a suitable object cluster.
- The average distance between the individual objects should not exceed a maximal value.
- Secondary dendrite arms appear typically with an elliptical shapes and the orientation of the major axis lengths of an equivalent ellipse is preferably perpendicular to the primary dendrite branch–and hence to the detected line.
- The average ellipse orientation should be perpendicular to the orientation of the detected line.
- High aspect ratios (measured by the ratio of major and minor axis length) indicate well-segmented secondary dendrite arms. Consequently, clusters with objects having higher aspect ratios are considered as better suited for SDAS measurement.
3. Results and Discussion
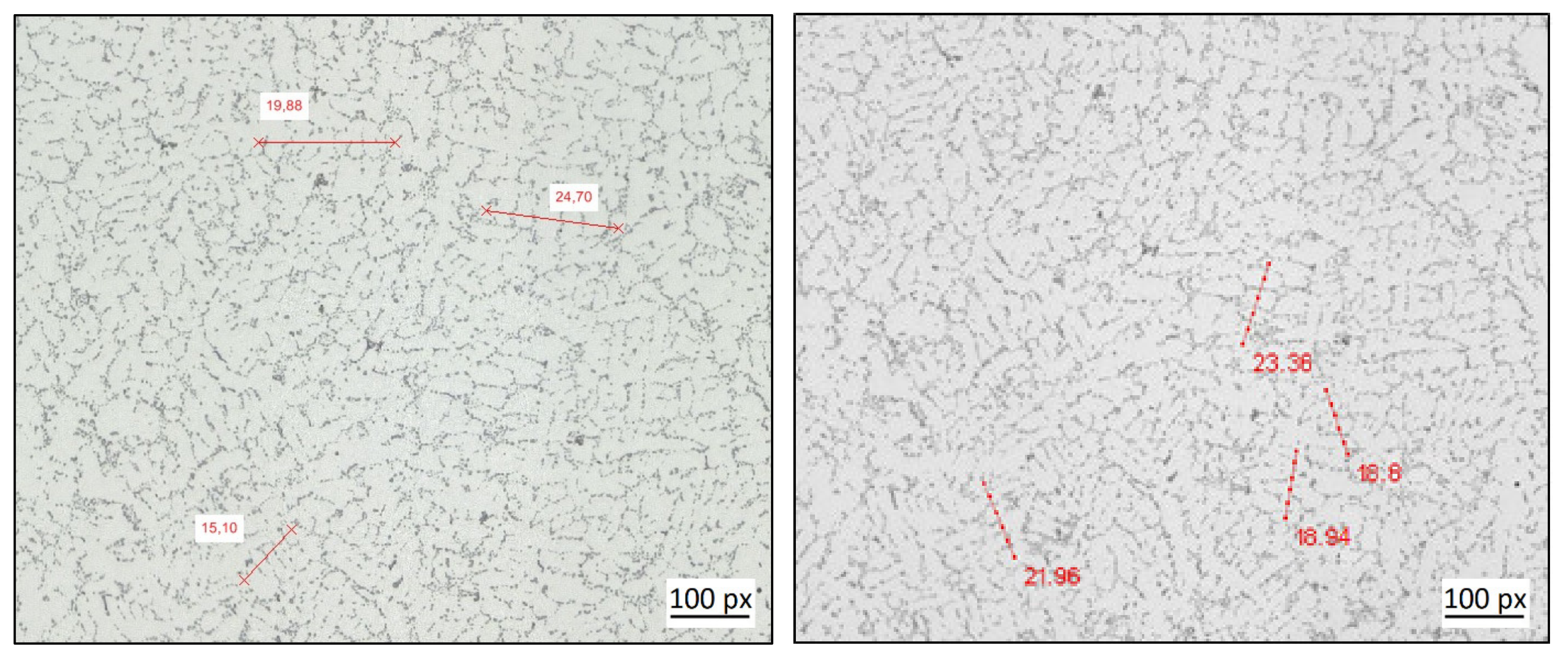
3.1. Secondary Dendrite Arm Spacing (SDAS) Measurements of Structure 1
3.2. SDAS Measurements of Structure 2
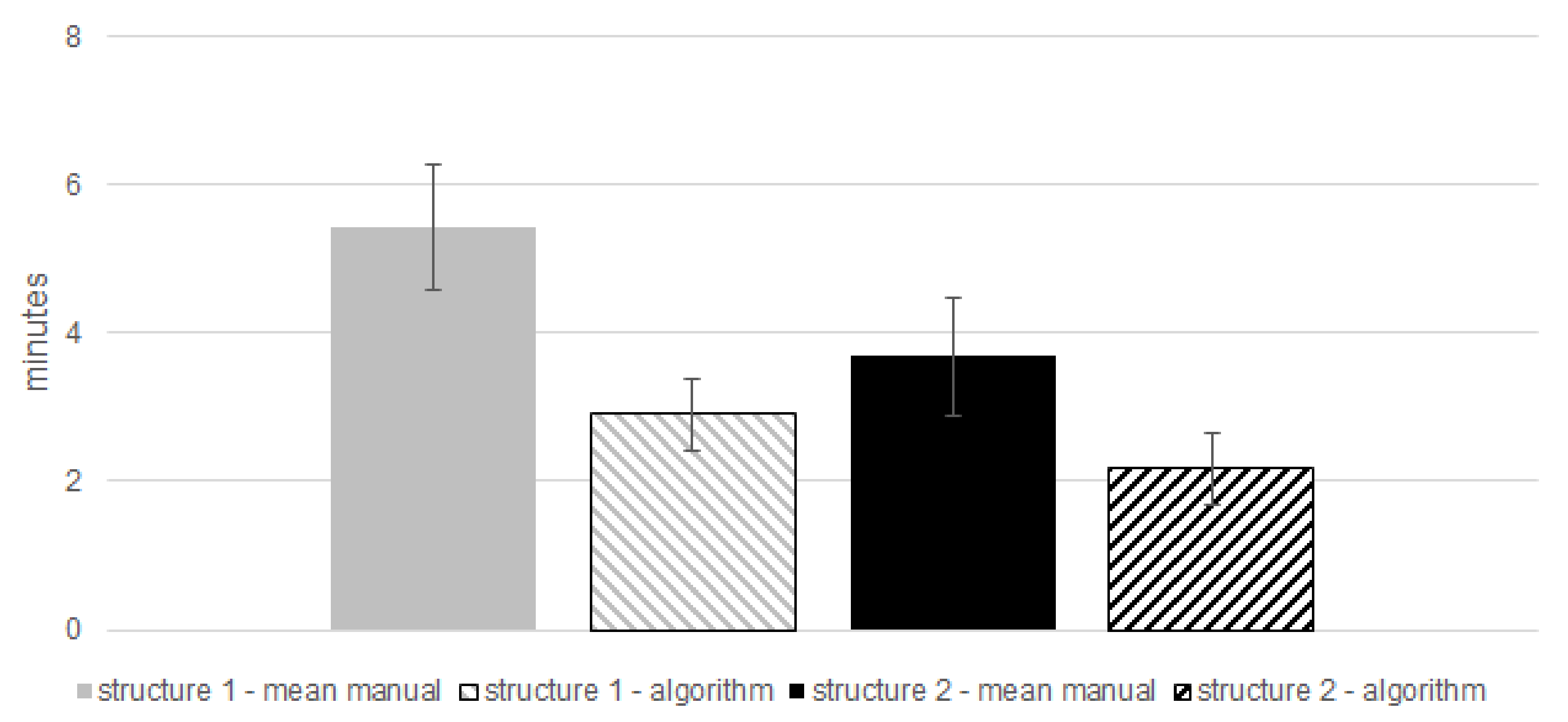
3.3. Computational Performance
4. Conclusions
- The detected dendrite arms were grouped through Hough transformation. The individual groups were scored based on a set of scalar measurements that can easily be assigned to the individual groups. This allowed for the identification of individual secondary dendrite structures that are suitable for SDAS measurement.
- Evaluating the automated measurement procedure against the manual values of six operators, the results were in good agreement.
- The algorithms were tested against six sets of manual SDAS measurements for two different AlSi cast alloys. A good agreement between manual and automated measurements was found in all cases, indicating the effectiveness of the developed algorithms in measuring the SDAS.
- The algorithms always decided uniformly within its possibilities, which is why the measured value can be interpreted more uniformly.
- An analysis of the required computation times revealed the algorithm was on average faster at measuring the SDAS than a human operator. Thus, the developed algorithms allowed for an increase in the measurement density that is used to characterize the cast microstructures.
- An increased measurement density will decrease the selection bias of the results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shabani, M.O.; Mazahery, A.; Bahmani, A.; Davami, P.; Varahram, N. Solidification of A356 Al alloy: Experimental study and modeling. Met. Mater. 2011, 49, 253–258. [Google Scholar] [CrossRef]
- Jha, A.K.; Sreekumar, K. Effect of pores and acicular eutectic silicon particles on the performance of Al–Si–Mg (AS7G03) casting. Eng. Fail. Anal. 2009, 16, 2433–2439. [Google Scholar] [CrossRef]
- Emadi, D.; Gruzleski, J.E.; Toguri, J.M. The effect of na and Sr modification on surface tension and volumetric shrinkage of A356 alloy and their influence on porosity formation. Met. Mater. Trans. A 1993, 24, 1055–1063. [Google Scholar] [CrossRef]
- Boileau, J.M.; Zindel, J.W.; Allison, J.E. The Effect of Solidification Time on the Mechanical Properties in a Cast A356-T6 Aluminum Alloy; SAE Technical Paper Series; SAE: Warrendale, PA, USA, 1997. [Google Scholar]
- Flemings, M.C.; Kattamis, T.Z.; Bardes, B. Dendrite arm spacing in aluminum alloys. AFS Transactions 1991, 99, 501–506. [Google Scholar]
- Ceschini, L.; Morri, A.; Morri, A.; Gamberini, A.; Messieri, S. Correlation between ultimate tensile strength and solidification microstructure for the sand cast A357 aluminium alloy. Mater. Des. 2009, 30, 4525–4531. [Google Scholar] [CrossRef]
- Zhou, Y.; Volek, A. Effect of dendrite arm spacing on castability of a directionally solidified nickel alloy. Scr. Mater. 2007, 56, 537–540. [Google Scholar] [CrossRef]
- Wang, Q.; Apelian, D.; Lados, D. Fatigue behavior of A356/357 aluminum cast alloys. Part II—Effect of microstructural constituents. J. Light Met. 2001, 1, 85–97. [Google Scholar] [CrossRef]
- Osório, W.R.; Spinelli, J.E.; Cheung, N.; Garcia, A. Secondary dendrite arm spacing and solute redistribution effects on the corrosion resistance of Al–10wt% Sn and Al–20wt% Zn alloys. Mater. Sci. Eng. A 2006, 420, 179–186. [Google Scholar] [CrossRef]
- Goulart, P.R.; Spinelli, J.; Osório, W.R.; Garcia, A. Mechanical properties as a function of microstructure and solidification thermal variables of Al–Si castings. Mater. Sci. Eng. A 2006, 421, 245–253. [Google Scholar] [CrossRef]
- Li, W.; Cui, H.; Wen, W.; Su, X.; Engler-Pinto, C. In situ nonlinear ultrasonic for very high cycle fatigue damage characterization of a cast aluminum alloy. Mater. Sci. Eng. A 2015, 645, 248–254. [Google Scholar] [CrossRef]
- Wang, Q.; Knight, J.W.; Hess, D.R. Method for Automatic Quantification of Dendrite Arm Spacing in Dendritic Microstructures. US Patent 9500594B2, 2016. [Google Scholar]
- Monroe, W.S.; Monroe, C.; Foley, R. The spacing transform: Application and validation. Mater. Charact. 2017, 127, 88–94. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 2nd ed.; Prentice Hall: Upper Saddle River, NY, USA, 2002. [Google Scholar]
- Haralick, R.M.; Shapiro, L.G. Computer and Robot Vision; Addison-Wesley: Boston, MA, USA, 1992. [Google Scholar]
- BDG-Richtlinie VDG-Merkblatt. P220: Bestimmung des Dendritenarmabstandes für Gussstücke aus Aluminium-Gusslegierungen, Version: 2011. Available online: https://www.bdguss.de/fileadmin/content_bdguss/Der_BDG/Richtlinien/P_220.pdf (accessed on 22 February 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Function |
|---|---|---|
| Nsub | 10 × 10 | Number of sub-images into which the original image is divided |
| T1 | 0 | Threshold value for initial binarization |
| MG | 5 × 5 | Size of the averaging mask for filtering of the binary image |
| σG | 5 | Standard deviation of the Gaussian filter |
| T2 | 0.6 | Threshold value for final binarization |
| Lerode | 3/0 * | Size of the structuring element (disk) used to erode the final binary image |
| Amin | 50 | Minimal number of pixels of a valid object |
| Smin | 0.85 | Minimal solidity value at which two neighboring segments are merged to a single one |
| Ldilate | 10 | Size of the structuring element (square) used to dilate the centroid mask |
| Δθ | 1 | Grid size of the angular coordinate used in the Hough transform |
| Δρ | 1 | Grid size of the radial coordinate used in the Hough transform |
| Npeaks | 3500 | Number of identified Hough peaks |
| Hmin | 0.1 * max(H) | Minimal intensity value at which a line is detected by the Hough transform |
| Lmin | 50 | Minimal length of a line detected via Hough transform |
| ΔL | 100/40 ** | Maximal gap width between two pixels that are associated by one line |
| Nmin | 6 | Minimal number of segments considered for cluster scoring |
| Nmax | 10 | Maximal number of segments considered for cluster scoring |
| wb | 80 | Weight penalizing non-homogeneous dendrite distance distributions |
| wc | 10 | Weight penalizing average SDAS that are above dmax |
| wd | 15 | Weight penalizing an average cluster orientation that is not perpendicular to the line orientation |
| we | 10 | Weight penalizing an average cluster orientation that is not perpendicular to the line orientation |
| wf | −5 | Factor weighting the average aspect ratio for cluster scoring |
| μd,max | 40/25 ** | Maximal average dendrite arm spacing |
| Ncommon | 2 | Maximal allowable number of common segments between two unique clusters |
| Si | Fe | Cu | Mn | Mg | Ni | Zn | Pb | Ti | Al | |
|---|---|---|---|---|---|---|---|---|---|---|
| AlSi10Mg(Cu) [EN AC-43200] | 9–11 | 0.65 | 0.35 | 0.55 | 0.2–0.45 | 0.15 | 0.35 | 0.1 | 0.2 | Balance |
| AlSi11 [EN AC-44000] | 10–11.8 | 0.15 | 0.02 | 0.05 | 0.1–0.45 | - | 0.07 | - | 0.15 | Balance |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gawert, C.; Bähr, R. Automatic Determination of Secondary Dendrite Arm Spacing in AlSi-Cast Microstructures. Materials 2021, 14, 2827. https://doi.org/10.3390/ma14112827
Gawert C, Bähr R. Automatic Determination of Secondary Dendrite Arm Spacing in AlSi-Cast Microstructures. Materials. 2021; 14(11):2827. https://doi.org/10.3390/ma14112827
Chicago/Turabian StyleGawert, Christian, and Rüdiger Bähr. 2021. "Automatic Determination of Secondary Dendrite Arm Spacing in AlSi-Cast Microstructures" Materials 14, no. 11: 2827. https://doi.org/10.3390/ma14112827
APA StyleGawert, C., & Bähr, R. (2021). Automatic Determination of Secondary Dendrite Arm Spacing in AlSi-Cast Microstructures. Materials, 14(11), 2827. https://doi.org/10.3390/ma14112827