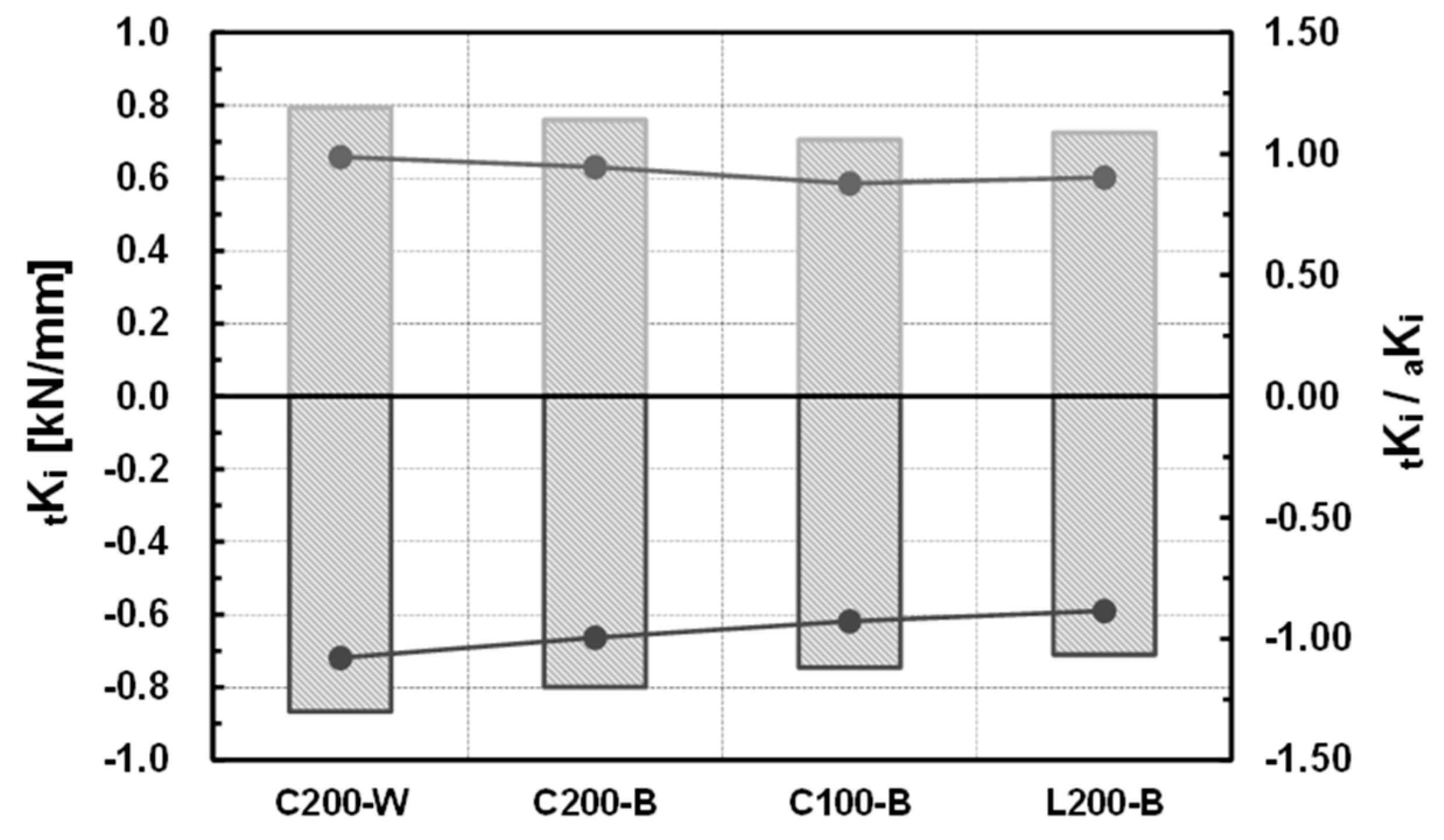
3.2. Theoretical and Experimental Initial Stiffness of the Specimens
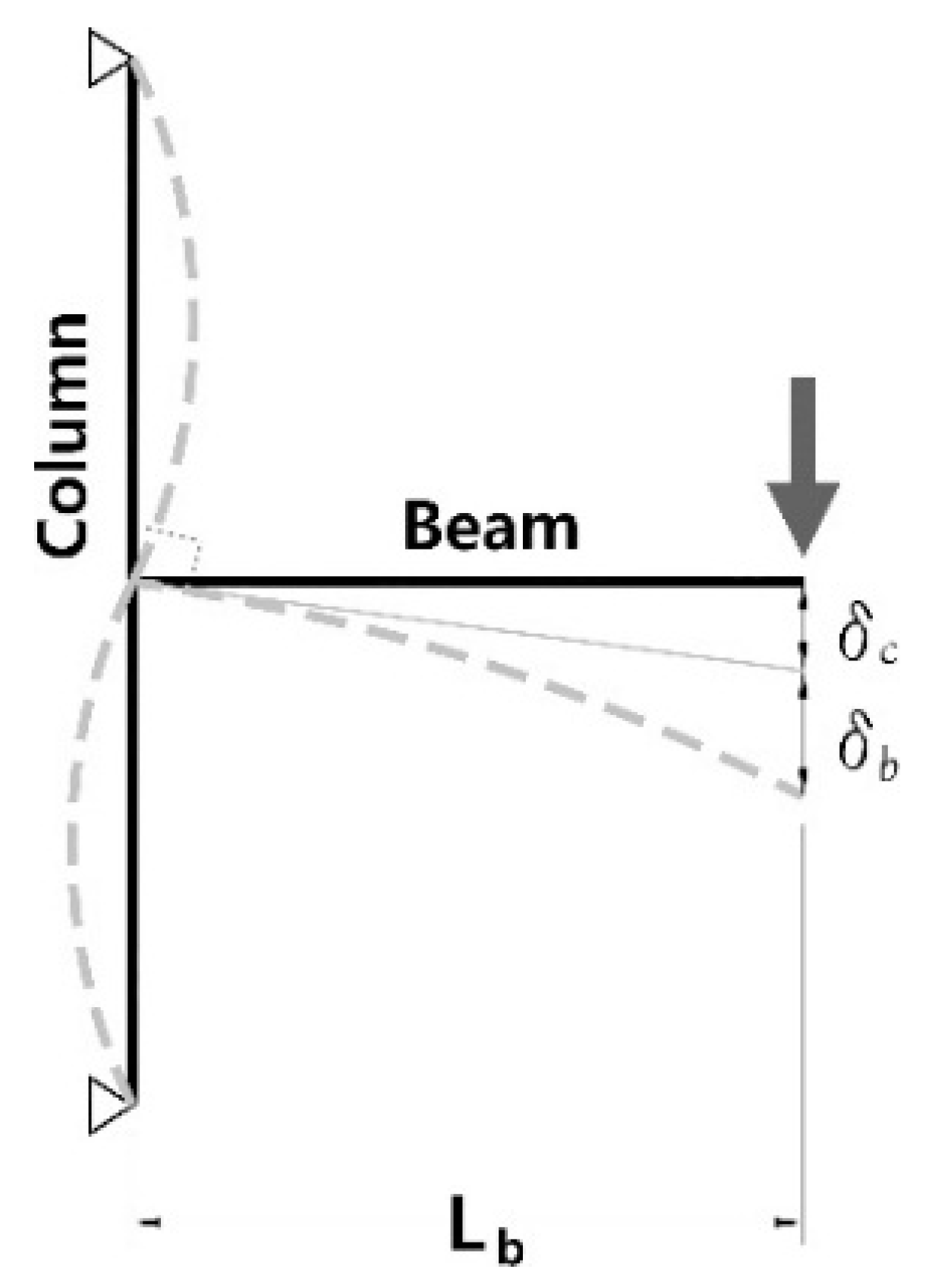
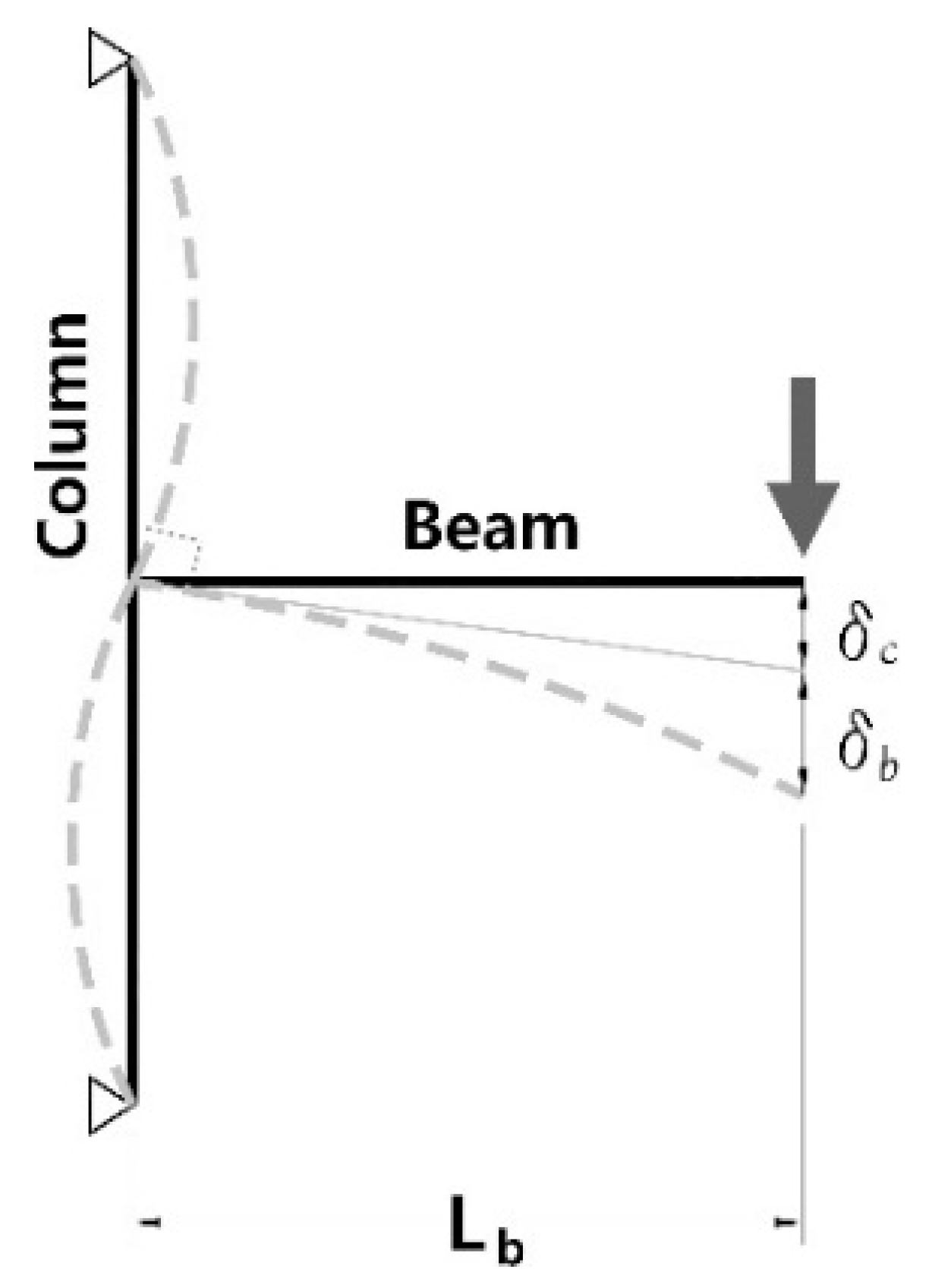
The initial stiffness of the specimens was compared with the theoretical stiffness based on the mechanical model shown in
Figure 6, while
Table 5 and
Figure 7 show the evaluation results.
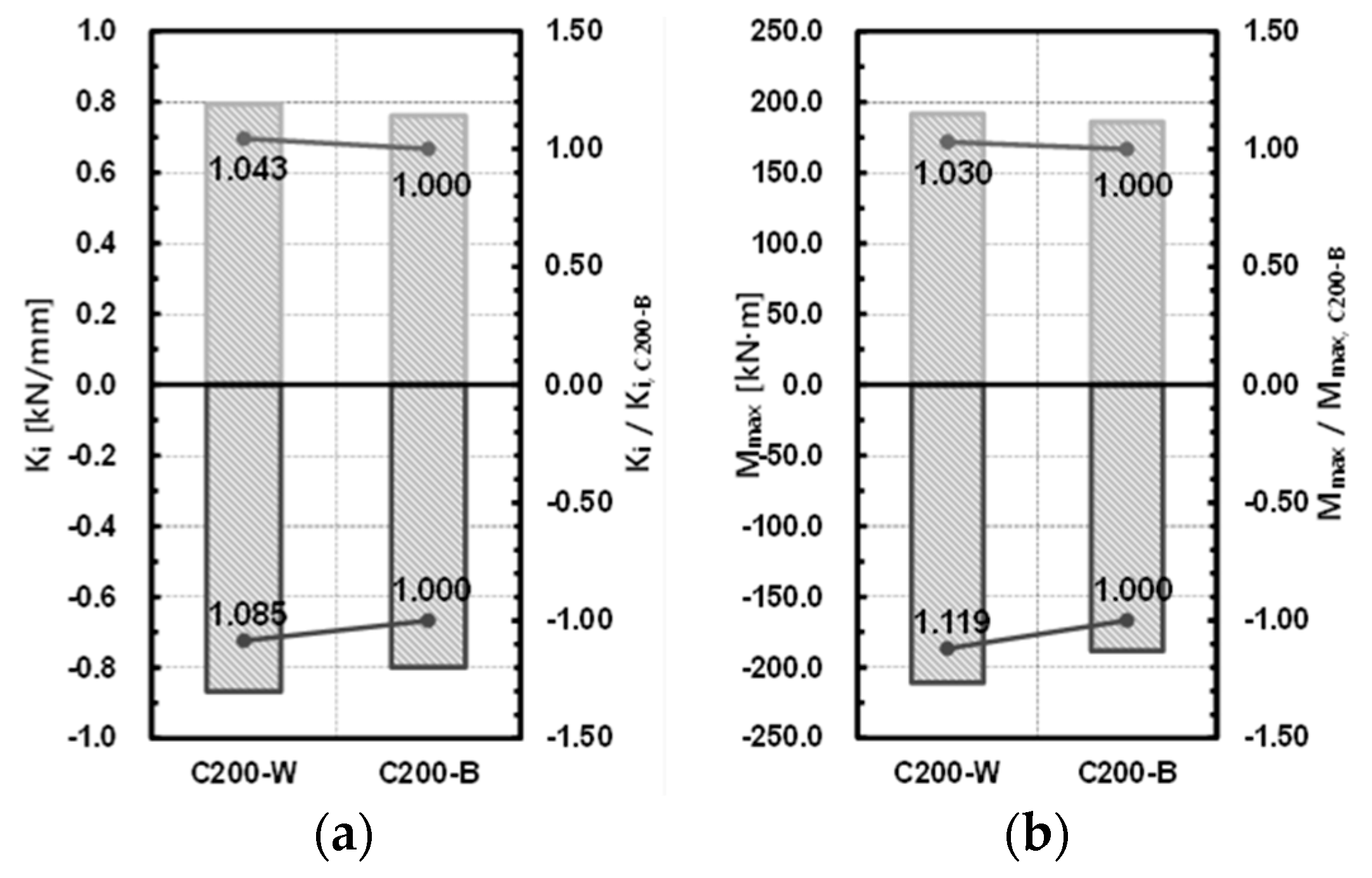
The stiffness of the specimens for the (+) direction showed a 0.987–0.878 distribution relative to the initial stiffness of the specimen based on the theoretical equation. The average was 0.928, and the standard deviation was 0.048. The stiffness for the (−) direction showed a 1.079–0.884 distribution relative to the theoretical initial stiffness. The average was 0.972, and the standard deviation was 0.085. Accordingly, the initial stiffness obtained from the experiment could predict the theoretical initial rigidity based on the mechanical model, and the result was close to a rigidly connected joint.
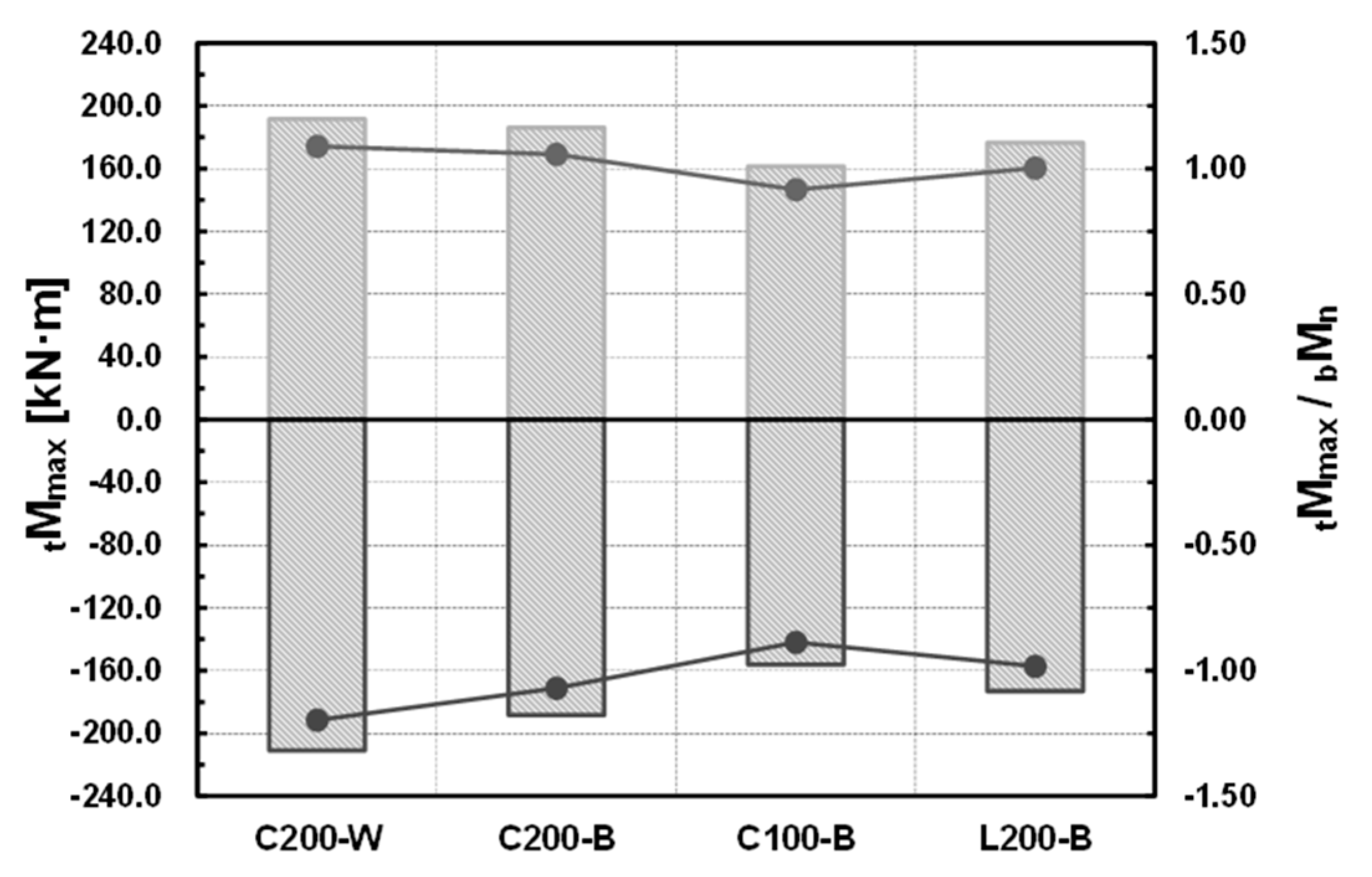
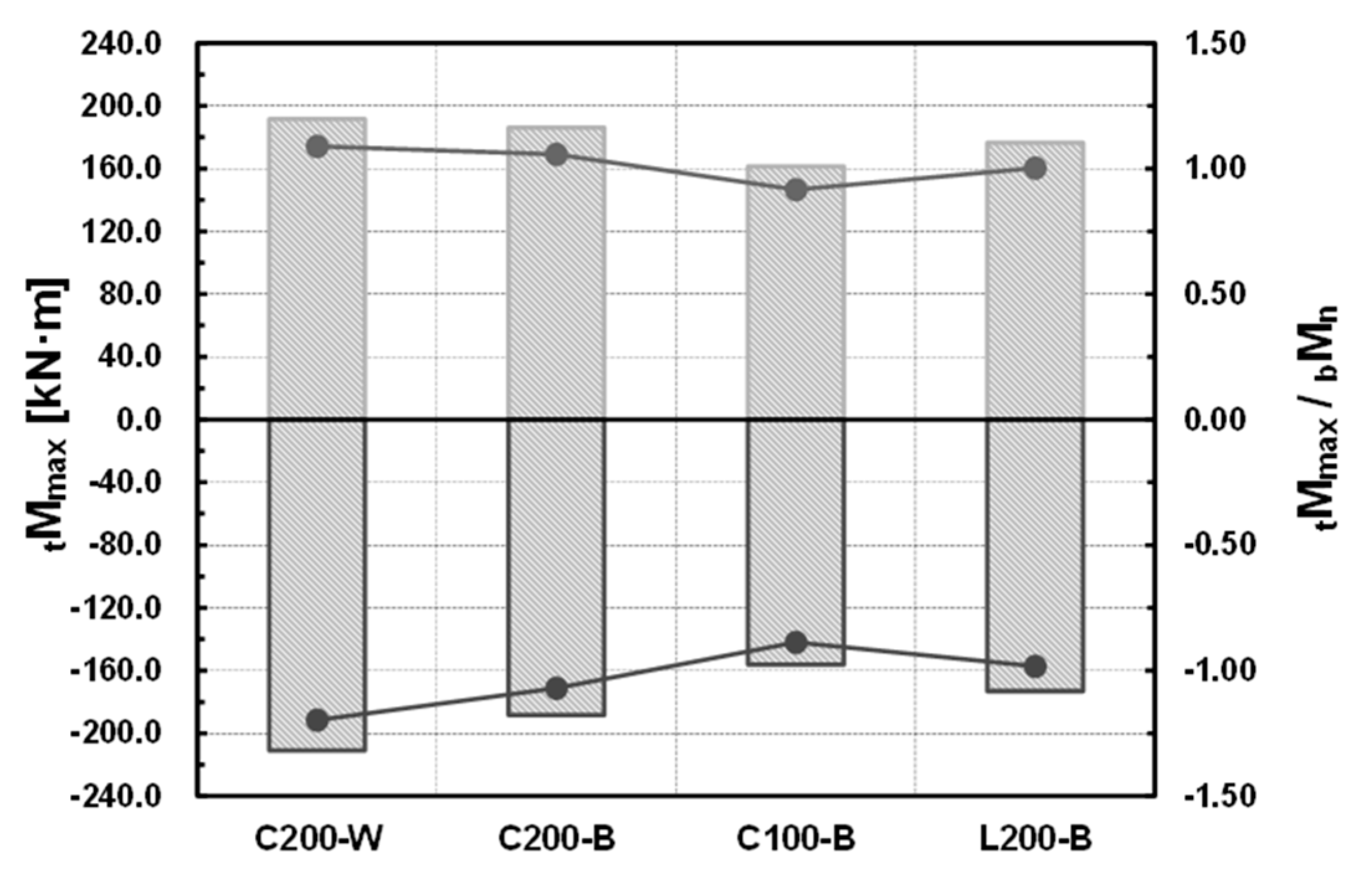
3.3. Maximum Resisting Force of Each Specimen
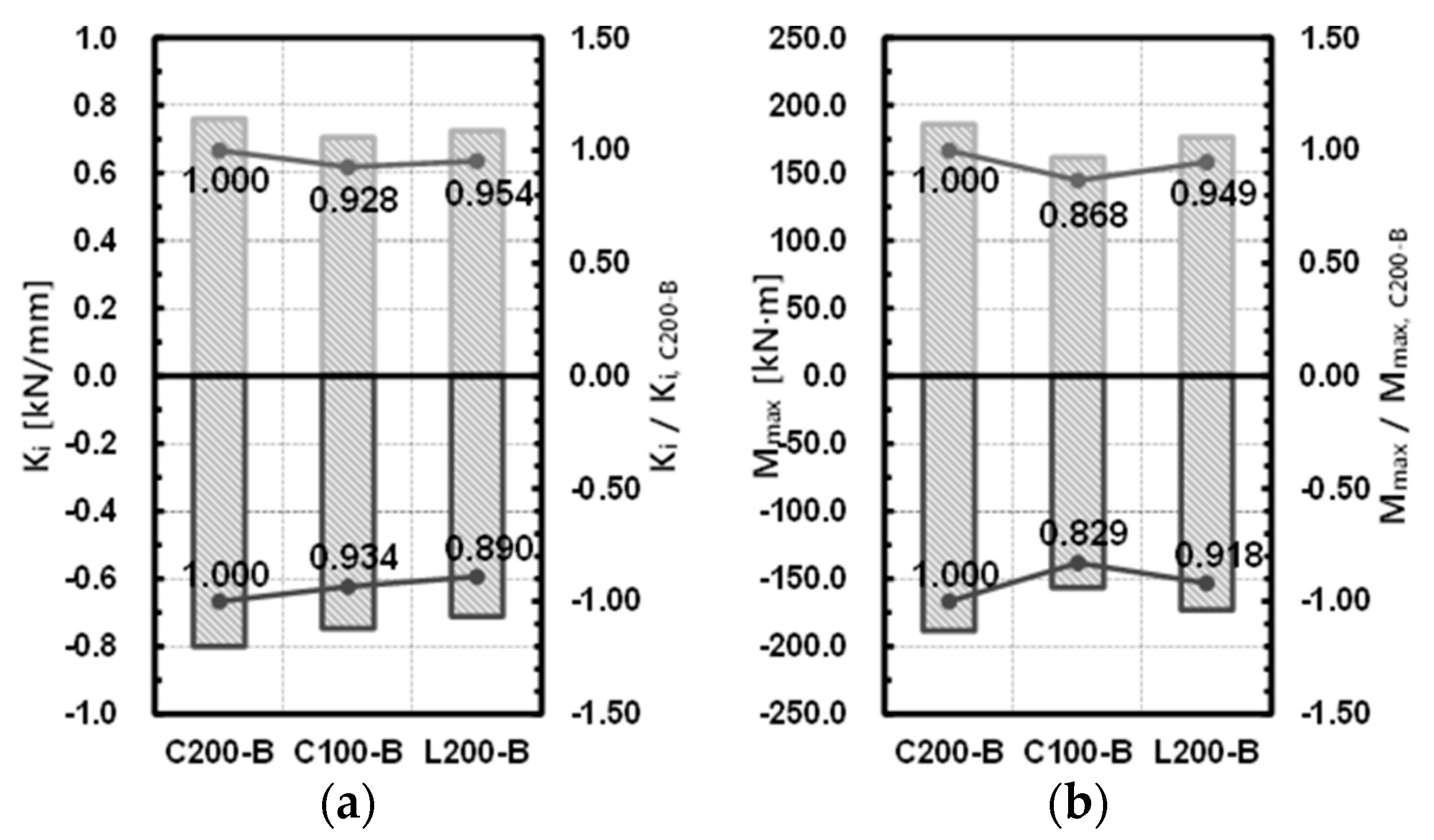
Using the tensile test results of the materials, the maximum resisting forces of the specimens were compared with the nominal moment strength of the floor beam based on the theoretical equation, similar to the initial stiffness examined in the previous section. The results of the comparison are shown in
Table 6 and
Figure 8. In this regard, the nominal moment strength, which is the theoretical maximum resisting force of the beam, is determined by the flange local buckling strength, whose value is smaller than those of the plastic moment and lateral buckling strength.
The maximum resisting forces of all the connections, excluding the (−) direction of specimens C100-B and L200-B, exceeded the theoretical nominal moment of the beam. For a total of four specimens, the maximum moment of the specimen for the (+) direction obtained from the experiment showed a 1.088–0.917 distribution relative to the theoretical nominal moment of the beam. The average was 1.016, and the standard deviation was 0.075. The maximum moment of the specimen for the (−) direction obtained from the experiment showed a 1.197–0.887 distribution relative to the theoretical nominal moment of the beam. The average was 1.034, and the standard deviation was 0.132. Accordingly, it was found that the maximum resisting force obtained from the experiment exceeded the maximum resisting force based on the theoretical equation.
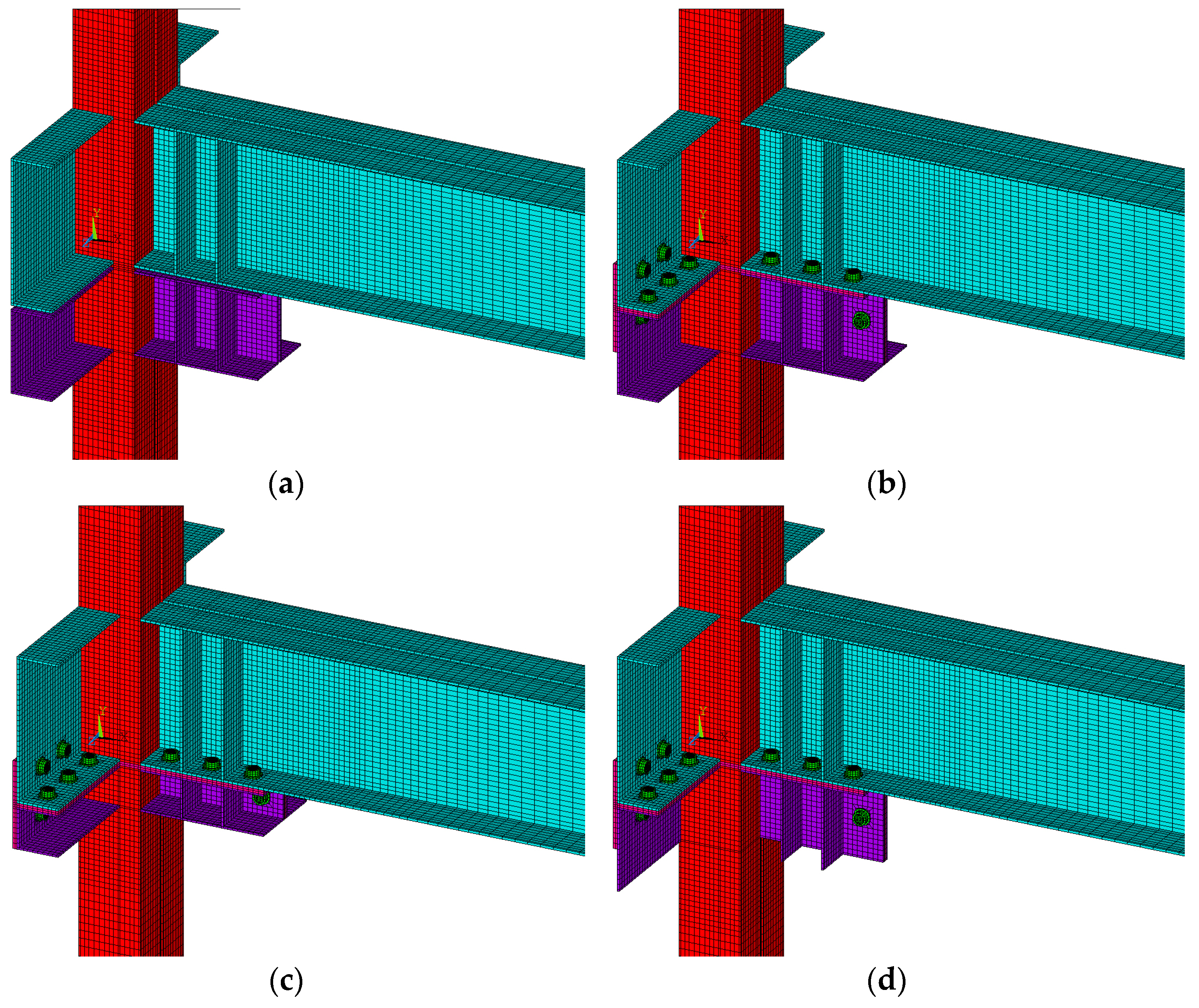
3.4. Finite Element (FE) Modeling and Analysis Results of Each Specimen
In order to compare the initial stiffness and strength of the specimen, ANSYS (ver.10.0) [
17], a general-purpose finite element method (FEM) software, was used to perform the analysis. The adopted FEM program has the advantage of easily introducing bolt tension in the analysis of joint and convenient modeling of contact state. The finite element used in the analysis was SOLID45 and the welded parts of the modeling were not considered. In the case of the 3D solid bolt model [
23], the screw part was not considered but the initial tension and contact elements of the bolt was introduced in this work. The bolt was given a design bolt (F10T-M20) tension value of 164.93 kN using PREST179 element [
17]. For the interface between the steel plate and the bolt, CONTA174 and TARGE170 elements were used, respectively, with the slip coefficient assumed to be 0.5. For convenience, it is assumed that no slip occurs on the side where the bolt and washer meet, with the results of finite element modeling of the specimen shown in
Figure 9.
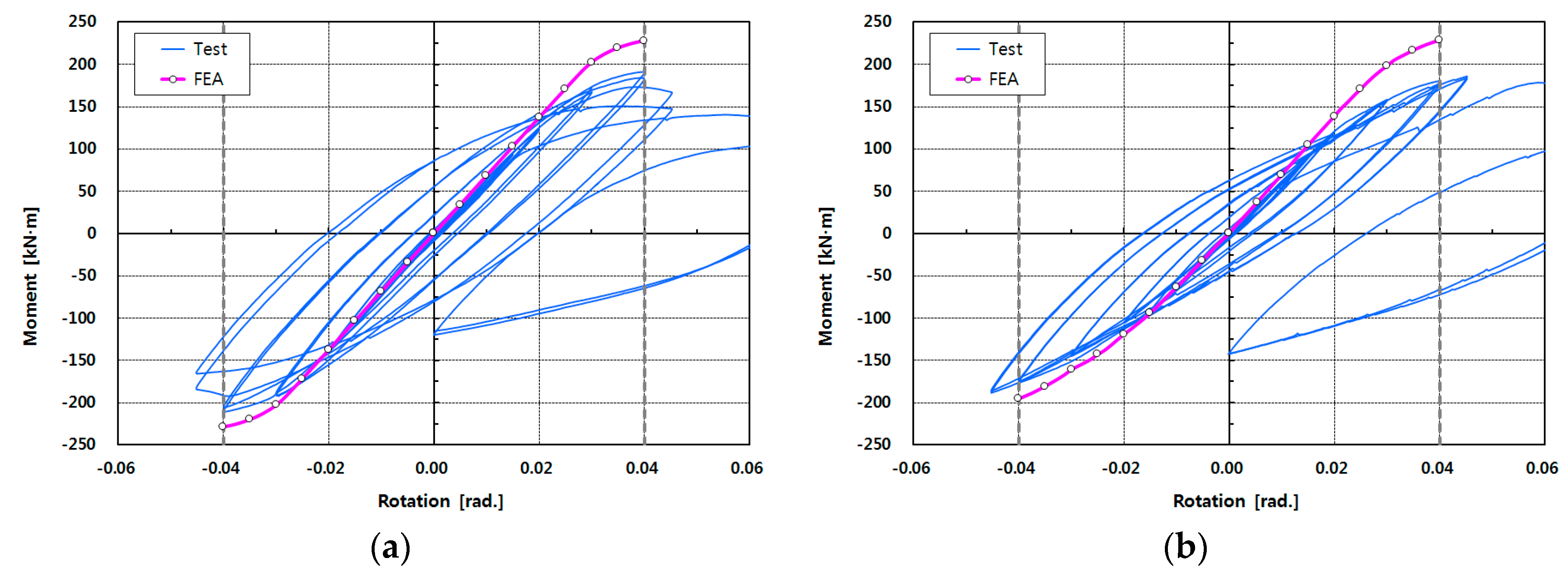
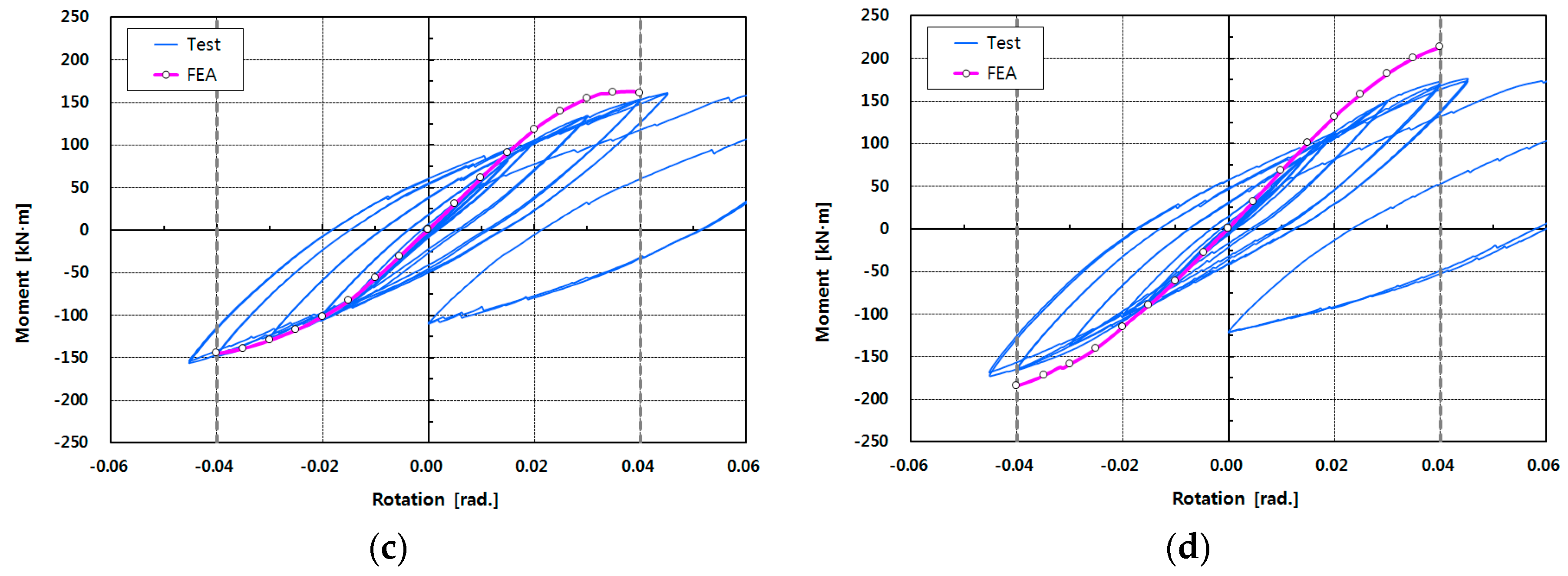
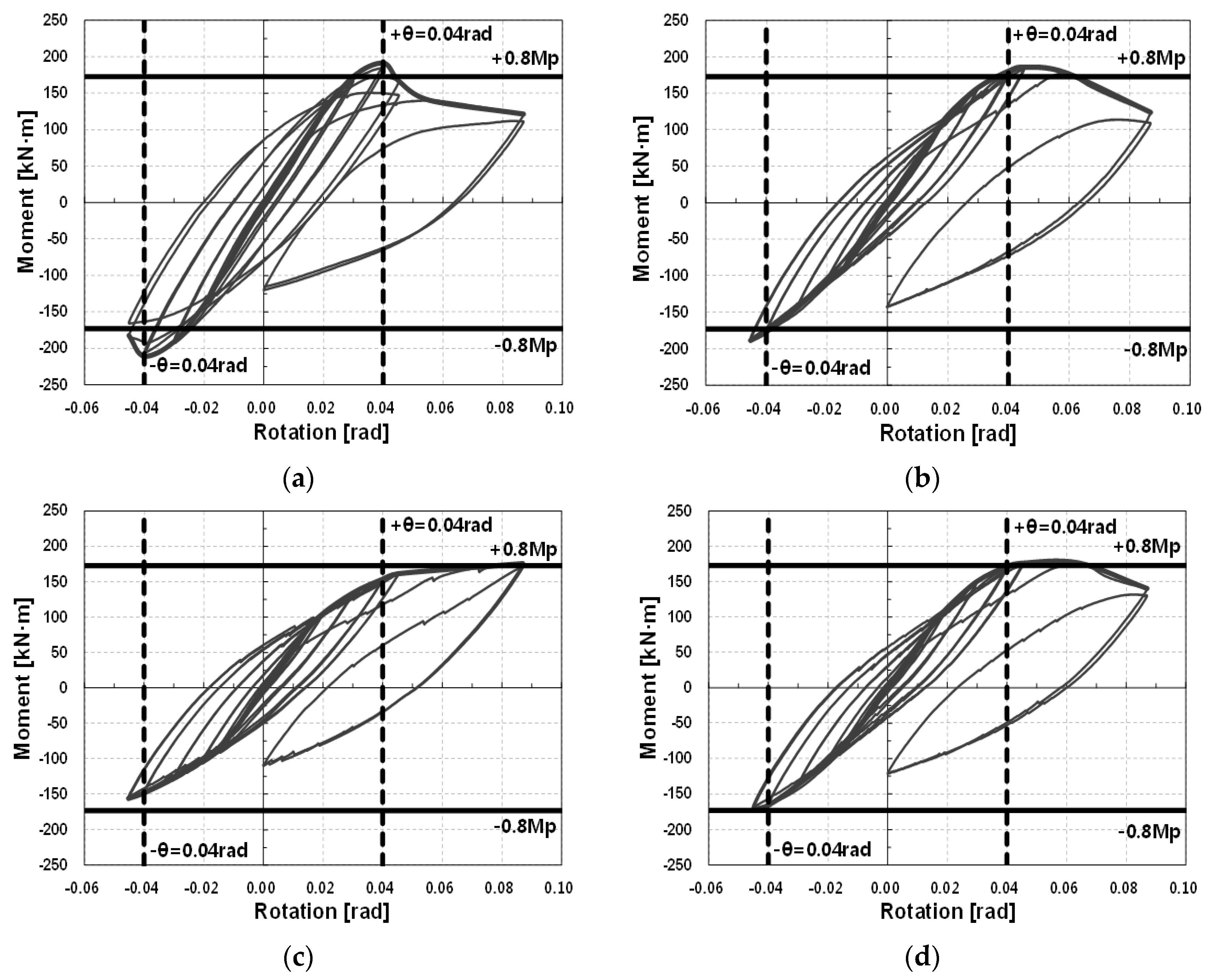
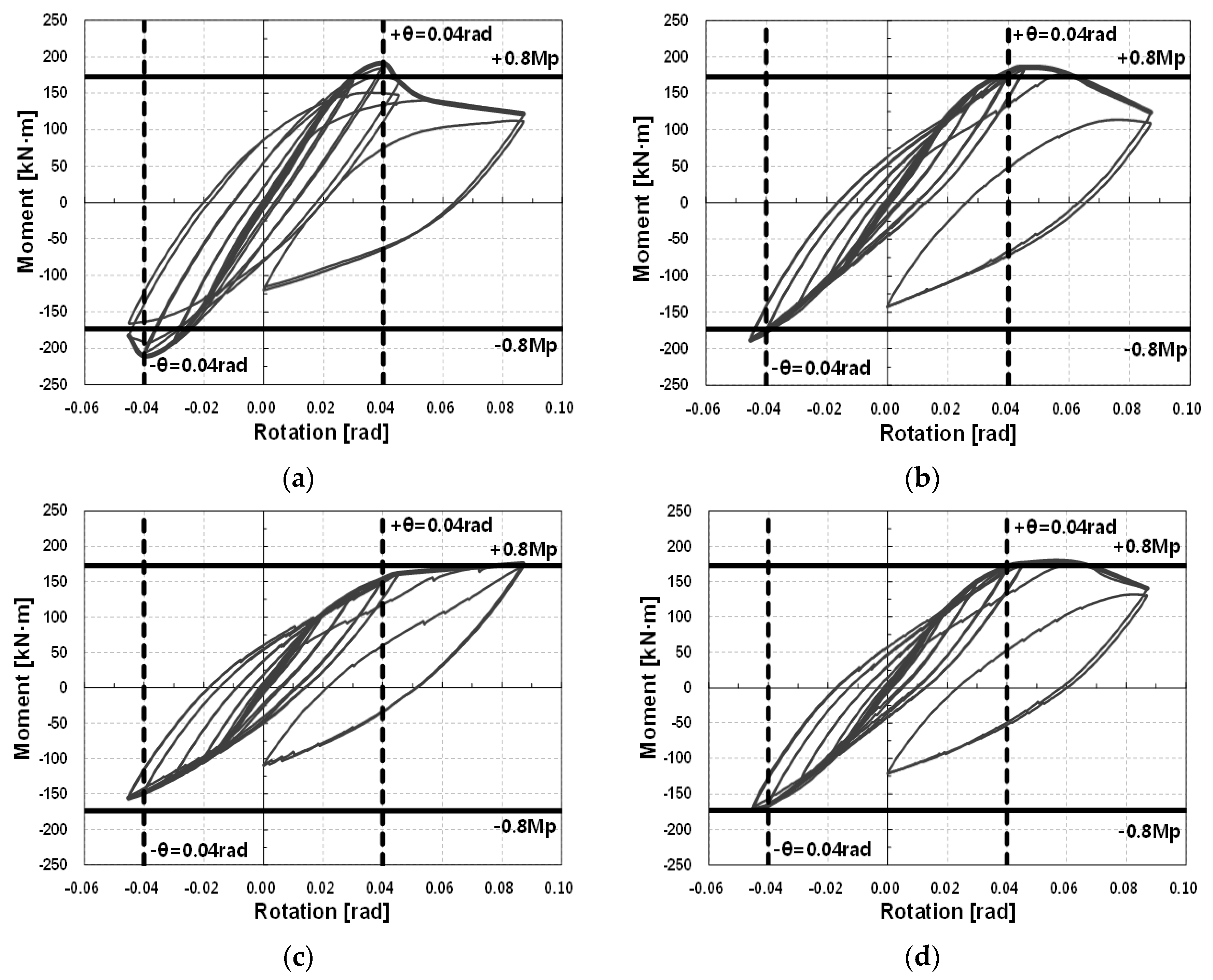
A 20 mm rigid element was modeled at the end of the column to assume both ends of the column as a hinge in the finite element modeling, before the boundary condition was applied. FE analysis should be performed according to the cyclic loading plan, but only incremental FE analysis was performed up to 4% drift angle (0.04 rad) in the (+) and (−) directions, respectively, for convenience and reduced analysis time. The results are shown in
Figure 10, and the moment–rotation curve shows an inelastic behavior beyond the elastic range as the drift angle increases. As shown in the figure, the nonlinear curve of the interpretation result shows a pattern similar to the hysteretic behavior, only the larger the drift angle is, the larger the difference is.
First, the initial stiffness through the FEA and the initial stiffness of the experimental results are compared in
Table 7 in order to compare the stiffness of the elastic region. The stiffness of the experimental results showed a 0.88–1.084 distribution relative to the initial stiffness of the specimen based on the FE analysis. The results are more consistent than the theoretical calculation. In other words, the initial stiffness of the FE model is more accurate than the simple initialized stiffness, and the initial stiffness of the test specimen is underestimated when reviewed based on the results of the analysis.
The results of incremental FE analysis were compared according to the drift angle, with the results shown in
Table 8. This table shows the results of FE analysis and comparison for the drift angles of 0.01, 0.02, 0.03, and 0.04 rad, respectively. In the table, the moment
of the specimen C200-W obtained from the experiment showed a 0.82–1.028 distribution relative to the moment
based on the FE analysis. For C200-B, C100-B, and L200-B, the moments showed 0.782–1.022, 0.865–1.084, and 0.801–0.935, respectively. The averages of the comparison results for C200-W, C200-B, C100-B, and L200-B were 0.922, 0.879, 0.961, and 0.866, respectively. Although it is relatively higher than the hysteresis curve, it shows a similar change, as described in
Figure 10. Since the FE analysis is an incremental analysis, it is difficult to directly compare the results of the experiment with the cyclic load, but the similarity between the initial stiffness and the nonlinear behavior can be observed. The difference in stiffness between the test specimens of the joints also was comparatively close to the experimental results.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}