Modeling of Axial Flux Permanent Magnet Generators




Abstract
1. Introduction
2. Mathematical Model
2.1. Distribution of Magnetic Field
2.1.1. Basic Model of Flux-Density Distribution Induced by PM
- θ—it is the angular coordinate associated with the air-gap,
- φ—it is the angle of the rotor position with respect to the reference frame.
2.1.2. Distribution of Flux-Density in a Machine with Real Shapes of a Magnetic Circuit
- —axial component of the flux-density distribution resulting from winding currents (windings magnetomotive forces MMF),
- —axial component of flux-density from permanent magnets.
- is the reference magnitude for the origin of the coordinate system,
- is the flux-density distribution induced by permanent magnets for a coreless machine.
- —an angle of coil pitch or coil span at coordinate r, .
- —an angle of the coil side width at coordinate r.
2.1.3. Flux-Density Distribution in Stator Coreless Machine
2.1.4. Flux-Density Distribution in Machine with Cores
2.2. Generator Model Equations
2.2.1. Model of Coreless Generator with Simple Magnets
- —the average value of the axial component of the magnetic flux-density distribution from PM in the middle of the air gap along the coordinate r (Figure 13) in the range of (),
- —the average value of the axial component of the magnetic flux-density distribution from PM in the middle of the air gap (Equation (1), Figure 5) according to the coordinates in the range of ,
- —maximum flux-density value,
- —the value of the magnetic flux-density at the edge of the magnets.
2.2.2. Model of a Generator with Stator Cores and Simple Magnets
2.2.3. Model of a Generator with Skewed Magnets
3. Simplified, Monoharmonic AFPMG Model in Steady State
4. Laboratory Tests and Model Verification
4.1. Characteristic of the Tested Generators
- coreless generator with simple magnets-G1
- coreless generator with skewed magnets-G2
- generator with cores and simple magnets-G3
- generator with cores and skewed magnets-G4
4.2. Models Verification
4.2.1. Verification of the Induced EMFs
4.2.2. Verification of Operating Simplified Models
- Coreless generator with simple magnets–G1
- Coreless generator with skewed magnets-G2
- Core generator with simple magnets-G3
- Core generator with skewed magnets-G4
4.3. Comparison of the Results Obtained from the Analytical Calculations and Laboratory Measurements
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chalmers, B.; Spooner, E. An axial-flux permanent-magnet generator for a gearless wind energy system. IEEE Trans. Energy Convers. 1999, 14, 251–257. [Google Scholar] [CrossRef]
- Caricchi, F.; Crescimbini, F.; Honrati, O. Modular axial-flux permanent-magnet motor for ship propulsion drives. IEEE Trans. Energy Convers. 1999, 14, 673–679. [Google Scholar] [CrossRef]
- Chen, Y.; Pillay, P.; Khan, A. PM Wind Generator Topologies. IEEE Trans. Ind. Appl. 2005, 41, 1619–1626. [Google Scholar] [CrossRef]
- Chan, T.F.; Lai, L.L. An Axial-Flux Permanent-Magnet Synchronous Generator for a Direct-Coupled Wind-Turbine System. IEEE Trans. Energy Convers. 2007, 22, 86–94. [Google Scholar] [CrossRef]
- Park, Y.-S.; Jang, S.-M.; Choi, J.-H.; Choi, J.-Y.; You, D.-J. Characteristic Analysis on Axial Flux Permanent Magnet Synchronous Generator Considering Wind Turbine Characteristics According to Wind Speed for Small-Scale Power Application. IEEE Trans. Magn. 2012, 48, 2937–2940. [Google Scholar] [CrossRef]
- Borkowski, D.; Wegiel, T. Small Hydropower Plant with Integrated Turbine-Generators Working at Variable Speed. IEEE Trans. Energy Convers. 2013, 28, 452–459. [Google Scholar] [CrossRef]
- Kaňuch, J.; Ferkova, Z. Design and simulation of disk stepper motor with permanent magnets. Arch. Electr. Eng. 2013, 62, 281–288. [Google Scholar] [CrossRef][Green Version]
- Gieras, J.F.; Wang, R.-J.; Kamper, M.J. Axial Flux Permanent Magnet Brushless Machines; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2004. [Google Scholar]
- Tesla, N. Electro-Magnetic Motor. U.S. Patent 405,858, 3 December 1889. [Google Scholar]
- Kirtley, J.L. Permanent Magnets in Electric Machines; John Wiley & Sons Ltd.: Chichester, UK, 2019; pp. 371–396. [Google Scholar]
- Aydin, M.; Huang, S.; Lipo, T.A. Axial flux permanent magnet disc machines: A review, Wisconsin Electric Machines & Power Electronics Consortium—Report. Conf. Rec. SPEEDAM 2004, 8, 61–71. [Google Scholar]
- Kamper, M.J.; Wang, R.-J.; Rossouw, F. Analysis and Performance of Axial Flux Permanent-Magnet Machine with Air-Cored Nonoverlapping Concentrated Stator Windings. IEEE Trans. Ind. Appl. 2008, 44, 1495–1504. [Google Scholar] [CrossRef]
- Zhilichev, Y.N. Three-dimensional analytic model of permanent magnet axial flux machine. IEEE Trans. Magn. 1998, 34, 3897–3901. [Google Scholar] [CrossRef]
- Parviainen, A.; Niemela, M.; Pyrhonen, J. Modeling of Axial Flux Permanent-Magnet Machines. IEEE Trans. Ind. Appl. 2004, 40, 1333–1340. [Google Scholar] [CrossRef]
- Azzouzi, J.; Barakat, G.; Dakyo, B. Quasi-3-D Analytical Modeling of the Magnetic Field of an Axial Flux Permanent-Magnet Synchronous Machine. IEEE Trans. Energy Convers. 2005, 20, 746–752. [Google Scholar] [CrossRef]
- Wang, R.-J.; Kamper, M.J.; Van Der Westhuizen, K.; Gieras, J. Optimal design of a coreless stator axial flux permanent-magnet generator. IEEE Trans. Magn. 2005, 41, 55–64. [Google Scholar] [CrossRef]
- Virtic, P.; Pisek, P.; Marcic, T.; Hadziselimovic, M.; Stumberger, B. Analytical Analysis of Magnetic Field and Back Electromotive Force Calculation of an Axial-Flux Permanent Magnet Synchronous Generator with Coreless Stator. IEEE Trans. Magn. 2008, 44, 4333–4336. [Google Scholar] [CrossRef]
- Hosseini, S.; Agha-Mirsalim, M.; Mirzaei, M. Design, Prototyping, and Analysis of a Low Cost Axial-Flux Coreless Permanent-Magnet Generator. IEEE Trans. Magn. 2007, 44, 75–80. [Google Scholar] [CrossRef]
- Choi, J.-Y.; Lee, S.-H.; Ko, K.-J.; Jang, S.-M. Improved Analytical Model for Electromagnetic Analysis of Axial Flux Machines with Double-Sided Permanent Magnet Rotor and Coreless Stator Windings. IEEE Trans. Magn. 2011, 47, 2760–2763. [Google Scholar] [CrossRef]
- Sung, S.-Y.; Jeong, J.-H.; Park, Y.-S.; Choi, J.-Y.; Jang, S.-M. Improved Analytical Modeling of Axial Flux Machine with a Double-Sided Permanent Magnet Rotor and Slotless Stator Based on an Analytical Method. IEEE Trans. Magn. 2012, 48, 2945–2948. [Google Scholar] [CrossRef]
- Stamenkovic, I.; Milivojevic, N.; Schofield, N.; Krishnamurthy, M.; Emadi, A. Design, Analysis, and Optimization of Ironless Stator Permanent Magnet Machines. IEEE Trans. Power Electron. 2012, 28, 2527–2538. [Google Scholar] [CrossRef]
- Jin, P.; Yuan, Y.; Minyi, J.; Shuhua, F.; Heyun, L.; Yang, H.; Ho, S.L. 3-D Analytical Magnetic Field Analysis of Axial Flux Permanent-Magnet Machine. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Huang, Y.; Zhou, T.; Dong, J.; Lin, H.; Yang, H.; Cheng, M. Magnetic Equivalent Circuit Modeling of Yokeless Axial Flux Permanent Magnet Machine with Segmented Armature. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Maryam, S.; Naghi, R.; Vahid, B.; Juha, P.; Majid, R. Comparison of Performance Characteristics of Axial-Flux Permanent-Magnet Synchronous Machine with Different Magnet Shapes. IEEE Trans. Magn. 2015, 51, 1–6. [Google Scholar]
- Aydin, M.; Zhu, Z.Q.; Lipo, T.A.; Howe, D. Minimization of Cogging Torque in Axial-Flux Permanent-Magnet Machines: Design Concepts. IEEE Trans. Magn. 2007, 43, 3614–3622. [Google Scholar] [CrossRef]
- Tiegna, H.; Amara, Y.; Barakat, G. Study of Cogging Torque in Axial Flux Permanent Magnet Machines Using an Analytical Model. IEEE Trans. Magn. 2014, 50, 845–848. [Google Scholar] [CrossRef]
- Aydin, M.; Gulec, M. Reduction of Cogging Torque in Double-Rotor Axial-Flux Permanent-Magnet Disk Motors: A Review of Cost-Effective Magnet-Skewing Techniques with Experimental Verification. IEEE Trans. Ind. Electron. 2013, 61, 5025–5034. [Google Scholar] [CrossRef]
- Wanjiku, J.; Khan, M.A.; Barendse, P.S.; Pillay, P. Influence of Slot Openings and Tooth Profile on Cogging Torque in Axial-Flux PM Machines. IEEE Trans. Ind. Electron. 2015, 62, 7578–7589. [Google Scholar] [CrossRef]
- Wegiel, T. Space harmonic interactions in axial flux permanent magnet generator. Tech. Trans. Electr. Eng. 2016, 65–79. [Google Scholar] [CrossRef]
- Radwan-Pragłowska, N.; Borkowski, D.; Wegiel, T. Model of coreless axial flux permanent magnet generator. In Proceedings of the 2017 International Symposium on Electrical Machines (SME), Naleczow, Poland, 18–21 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Radwan-Pragłowska, N.; Węgiel, T.; Borkowski, D. Parameters identification of coreless axial flux permanent magnet generator. Arch. Electr. Eng. 2018, 67, 391–402. [Google Scholar]
- Radwan-Praglowska, N. Mathematical Model of PM Disc Generator with Iron Cores of Stator Coils. In Proceedings of the 2018 14th Selected Issues of Electrical Engineering and Electronics (WZEE), Szczecin, Poland, 19–21 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Heller, B.; Hamata, V. Harmonic Field Effects in Induction Machines; Elsevier: Amsterdam, The Netherlands, 1977. [Google Scholar]
- Sobczyk, T.J.; Drozdowski, P. Inductances of electrical machine winding with a nonuniform air-gap. Electr. Eng. 1993, 76, 213–218. [Google Scholar] [CrossRef]
- Wegiel, T. Space Harmonic Interactions in Permanent Magnet Generator; Monograph No 447; Cracow University of Technology: Cracow, Poland, 2013. [Google Scholar]
- Wegiel, T. Cogging torque analysis based on energy approach in surface-mounted PM machines. In Proceedings of the 2017 International Symposium on Electrical Machines (SME), Naleczow, Poland, 18–21 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Di Gerlando, A.; Foglia, G.; Iacchetti, M.F.; Perini, R. Analysis and Test of Diode Rectifier Solutions in Grid-Connected Wind Energy Conversion Systems Employing Modular Permanent-Magnet Synchronous Generators. IEEE Trans. Ind. Electron. 2011, 59, 2135–2146. [Google Scholar] [CrossRef]
- Sudhoff, S.; Corzine, K.; Hegner, H.; Delisle, D. Transient and dynamic average-value modeling of synchronous machine fed load-commutated converters. IEEE Trans. Energy Convers. 1996, 11, 508–514. [Google Scholar] [CrossRef]
- Borkowski, D. Average-value model of energy conversion system consisting of PMSG, diode bridge rectifier and DPC-SVM controlled inverter. In Proceedings of the 2017 International Symposium on Electrical Machines (SME), Naleczow, Poland, 18–21 June 2017; pp. 1–6. [Google Scholar] [CrossRef]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters and Dimensions of the Permanent Magnets of AFPM Generators |
|
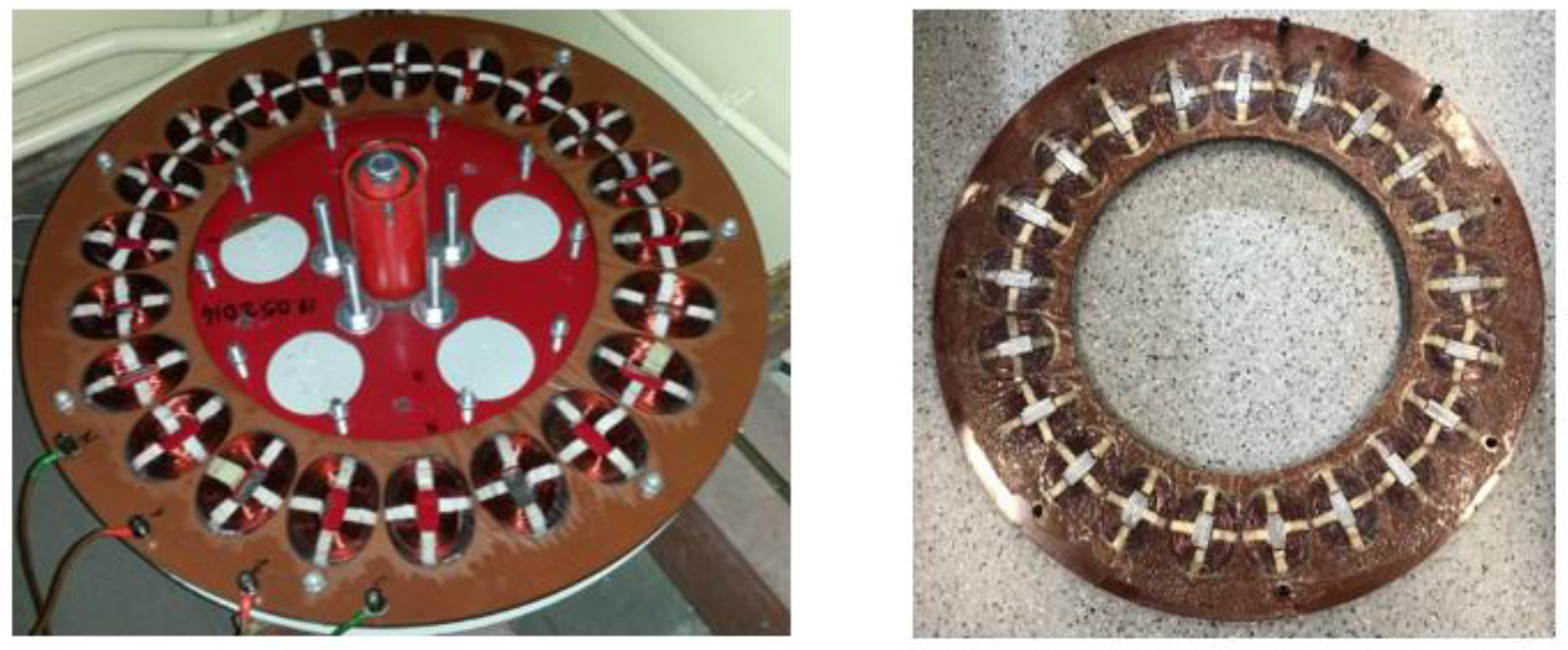
| Construction of the stator in AFPM generator |
|
| AFPMG | THDE | ||
|---|---|---|---|
| Analytical Calculations | Measure | ||
| G1 | Single magnets; coreless stator | 6.1% | 6.5% |
| G2 | Oblique magnets; coreless stator | 2.0% | 2.2% |
| G3 | Single magnets; stator with cores | 6.0% | 7.3% |
| G4 | Oblique magnets; stator with cores | 1.3% | 1.9% |
| AFPMG | EG (RMS) | IG (RMS) | |||||
|---|---|---|---|---|---|---|---|
| Analytical | Measure | |ΔEG (%)| | Analytical | Measure | |ΔIG (%)| | ||
| G1 | Simple magnets; coreless stator | 61.3 V | 62.6 V | 2.1% | 1.65 A | 1.69 A | 2.4% |
| G2 | Skewed magnets; coreless stator | 101.5 V | 105.1 V | 3.4% | 2.42 A | 2.46 A | 1.6% |
| G3 | Simple magnets; stator with cores | 101.3 V | 95.8 V | 5.7% | 2.29 A | 2.23 A | 2.6% |
| G4 | Skewed magnets; stator with cores | 143.4 V | 140.9 V | 1.8% | 3.52 A | 3.43 A | 2.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Radwan-Pragłowska, N.; Węgiel, T.; Borkowski, D. Modeling of Axial Flux Permanent Magnet Generators. Energies 2020, 13, 5741. https://doi.org/10.3390/en13215741
Radwan-Pragłowska N, Węgiel T, Borkowski D. Modeling of Axial Flux Permanent Magnet Generators. Energies. 2020; 13(21):5741. https://doi.org/10.3390/en13215741
Chicago/Turabian StyleRadwan-Pragłowska, Natalia, Tomasz Węgiel, and Dariusz Borkowski. 2020. "Modeling of Axial Flux Permanent Magnet Generators" Energies 13, no. 21: 5741. https://doi.org/10.3390/en13215741
APA StyleRadwan-Pragłowska, N., Węgiel, T., & Borkowski, D. (2020). Modeling of Axial Flux Permanent Magnet Generators. Energies, 13(21), 5741. https://doi.org/10.3390/en13215741