Sensorless Direct Torque Control of Surface-Mounted Permanent Magnet Synchronous Motors with Nonlinear Kalman Filtering


Abstract
:1. Introduction
2. Dynamics of Surface-Mounted Permanent Magnet Synchronous Motors
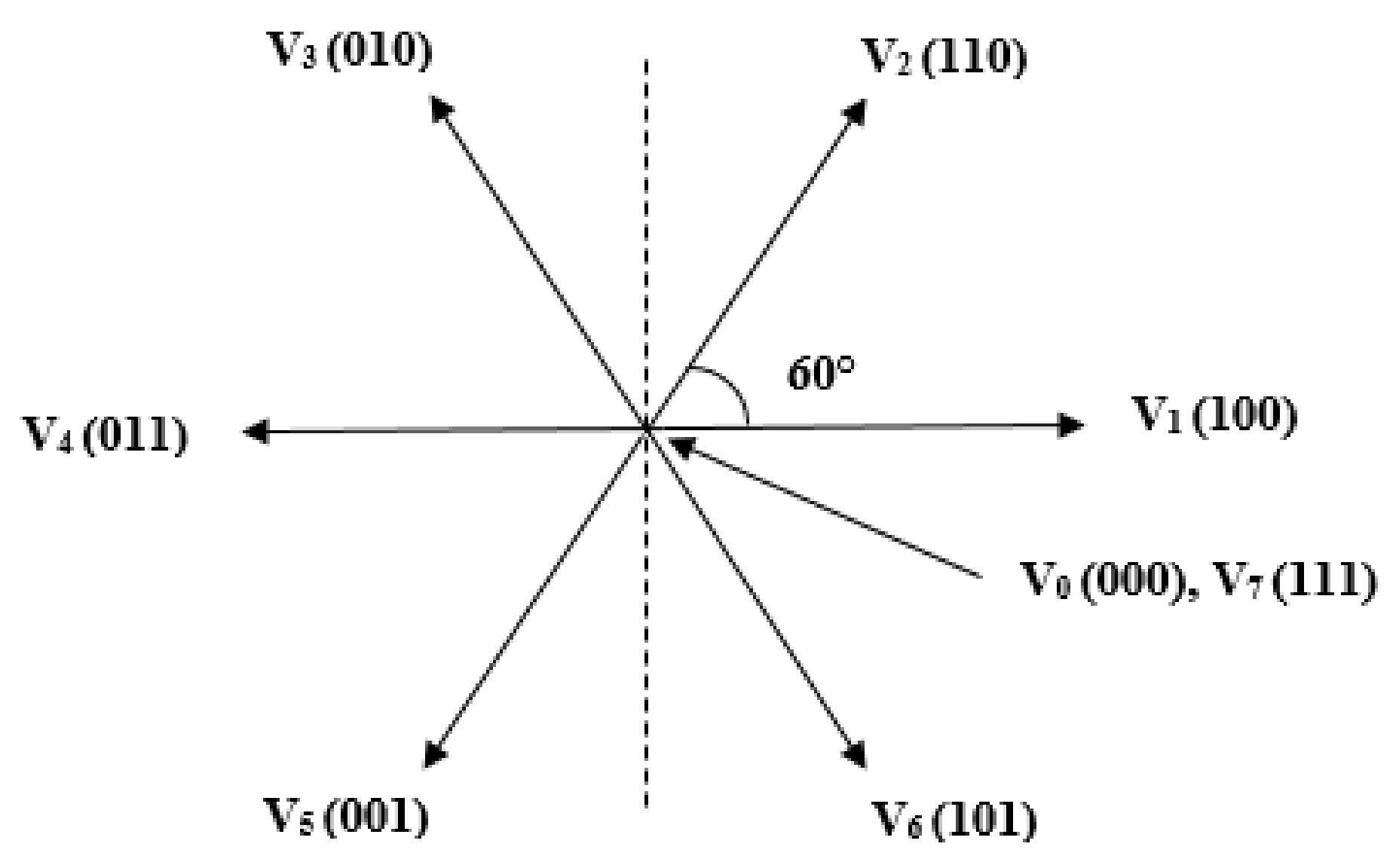
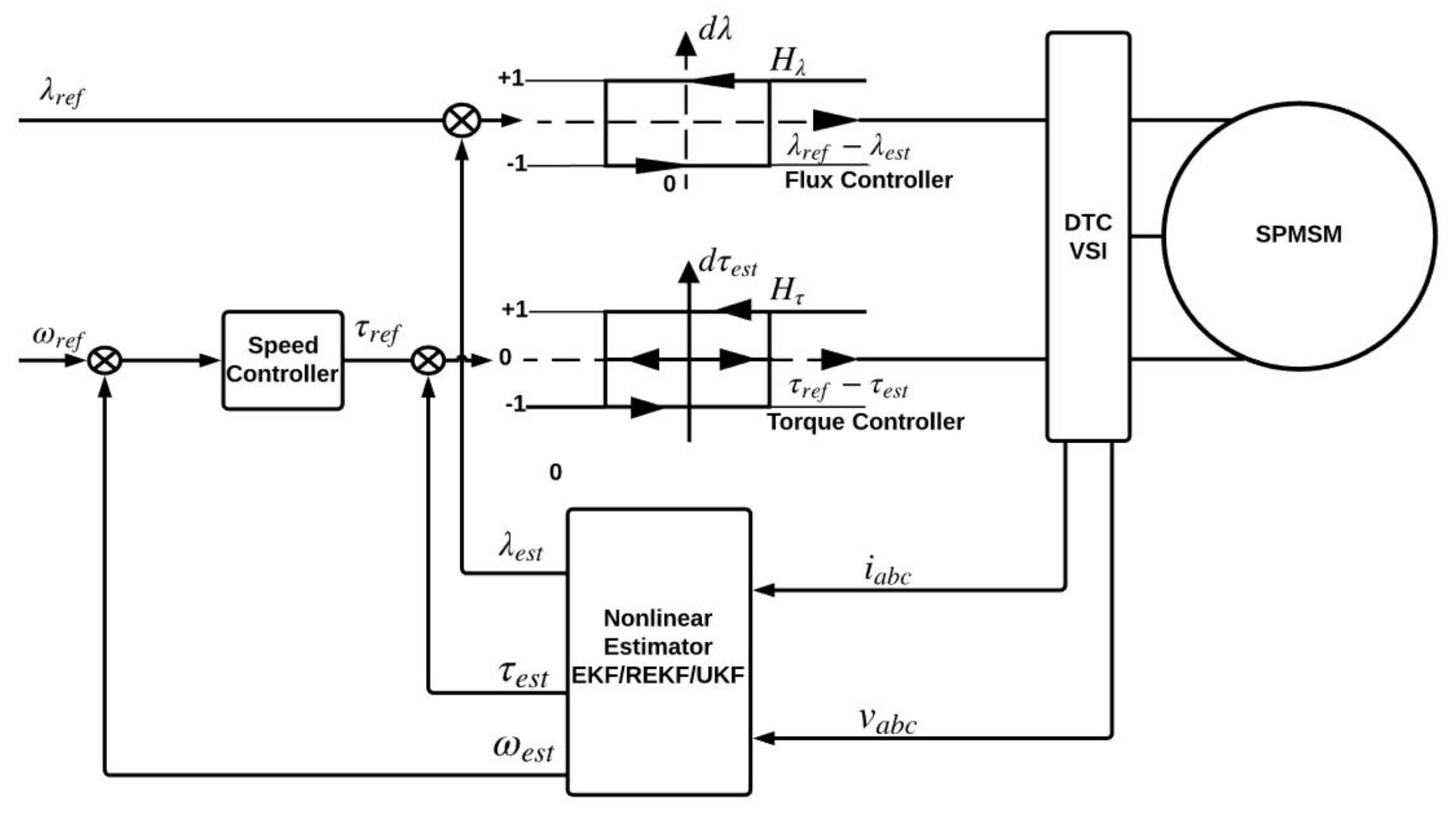
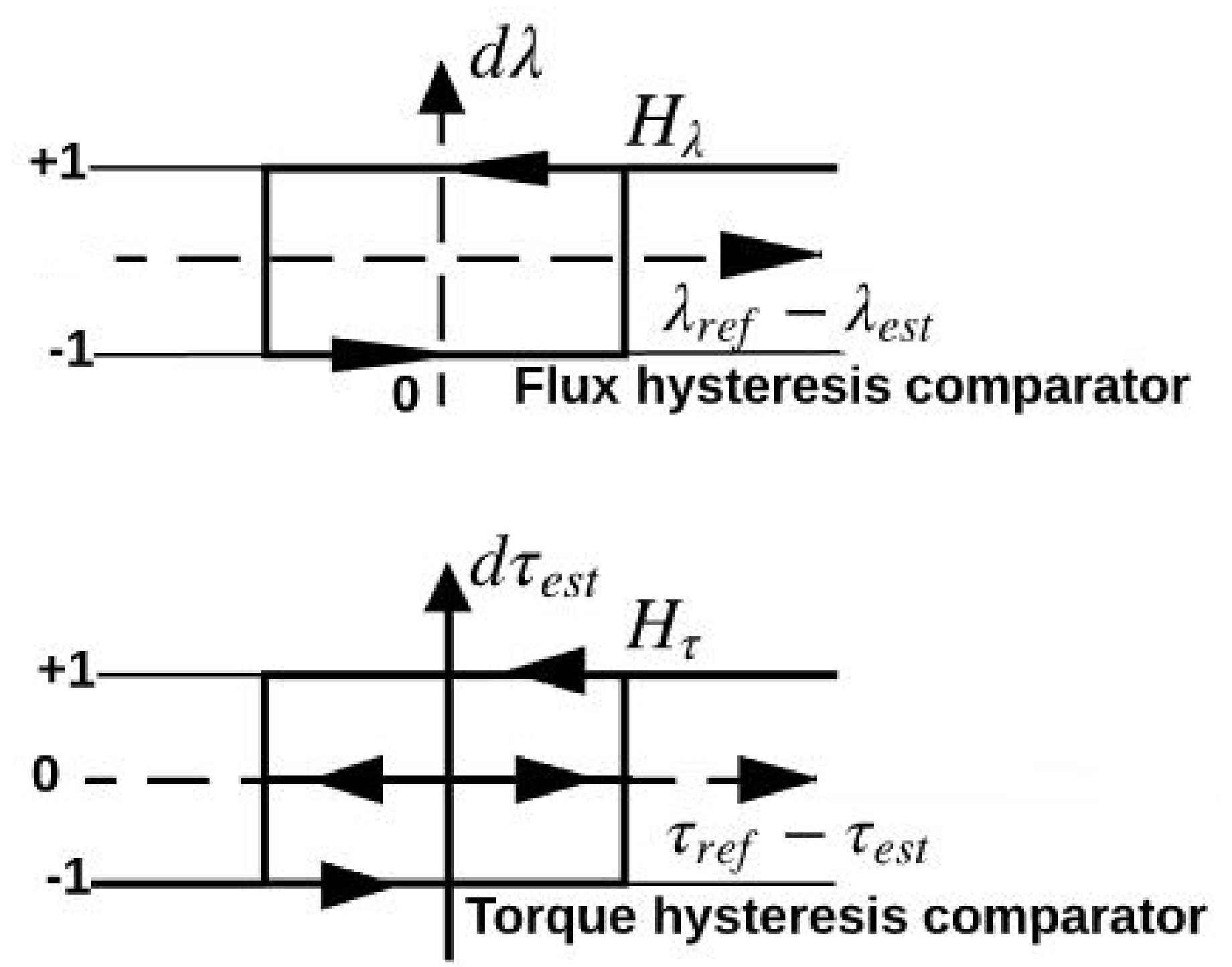
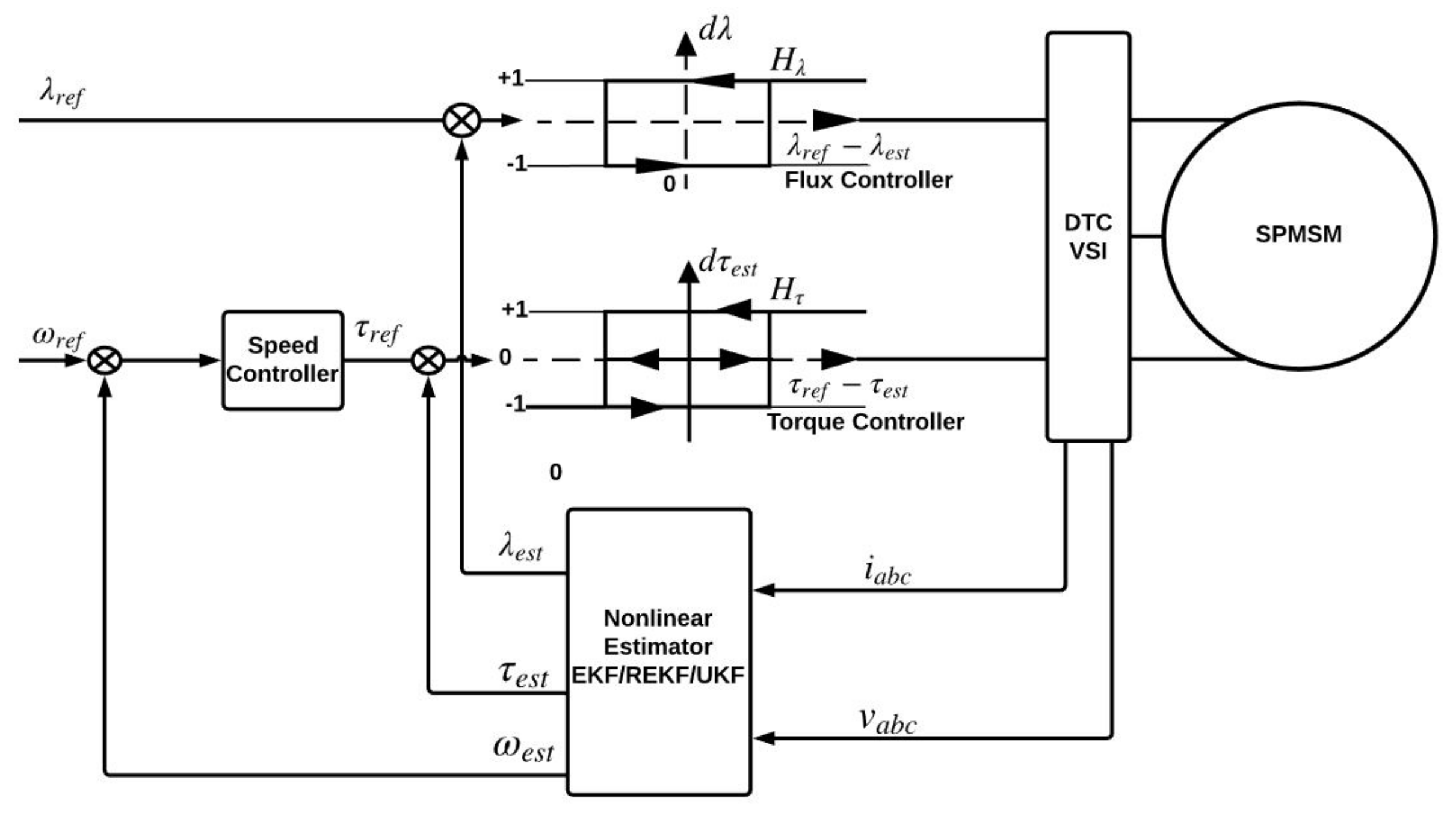
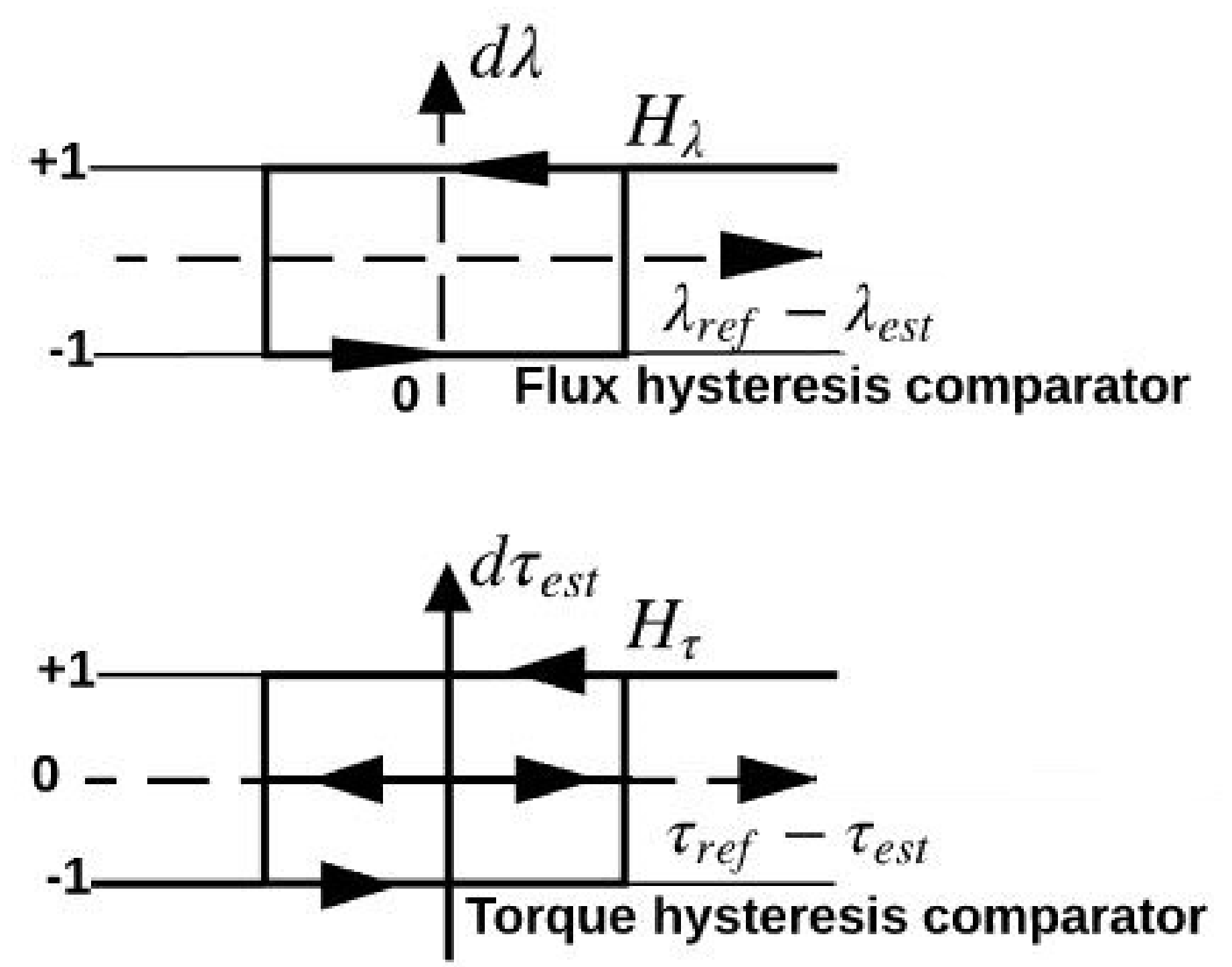
3. Direct Torque Control
4. Nonlinear Estimation
4.1. Extended Kalman Filter
4.2. Resilient Extended Kalman Filter
- state vector
- system noise
- measurement vector
- measurement noise in each phasormeasurement unit and
- differentiable non-linear vector functions
- Initialization
- Computation of Jacobian matrices
- For time steps , the estimator propagates by calculating the feedback gainfrom an upper bound on the local estimation error covarianceto be used in updating the state estimate aswhere
4.3. Unscented Kalman Filter
- process model
- state vectors
- input state vectors
- output model
- output state vectors
- process WGN
- measurement WGN
- Initialization
- Define sigma points and weights for as follows:The weighing coefficients are determined bywhere the weight must agreeand is row or column of the matrix square root of .
- Process UpdateThe priori mean and covariance of the estimated value can be obtained using the transformed sigma points as follows:
- Output Covariance UpdateThe predicted measurement is
- Cross-correlation UpdateThe cross-correlation is determined by
- Measurement UpdateThe final measurement update can be performed using normal Kalman filter equations as: The Kalman gain can be written as follows:The posteriori covariance matrix and the estimated state variable can be expressed as follows:
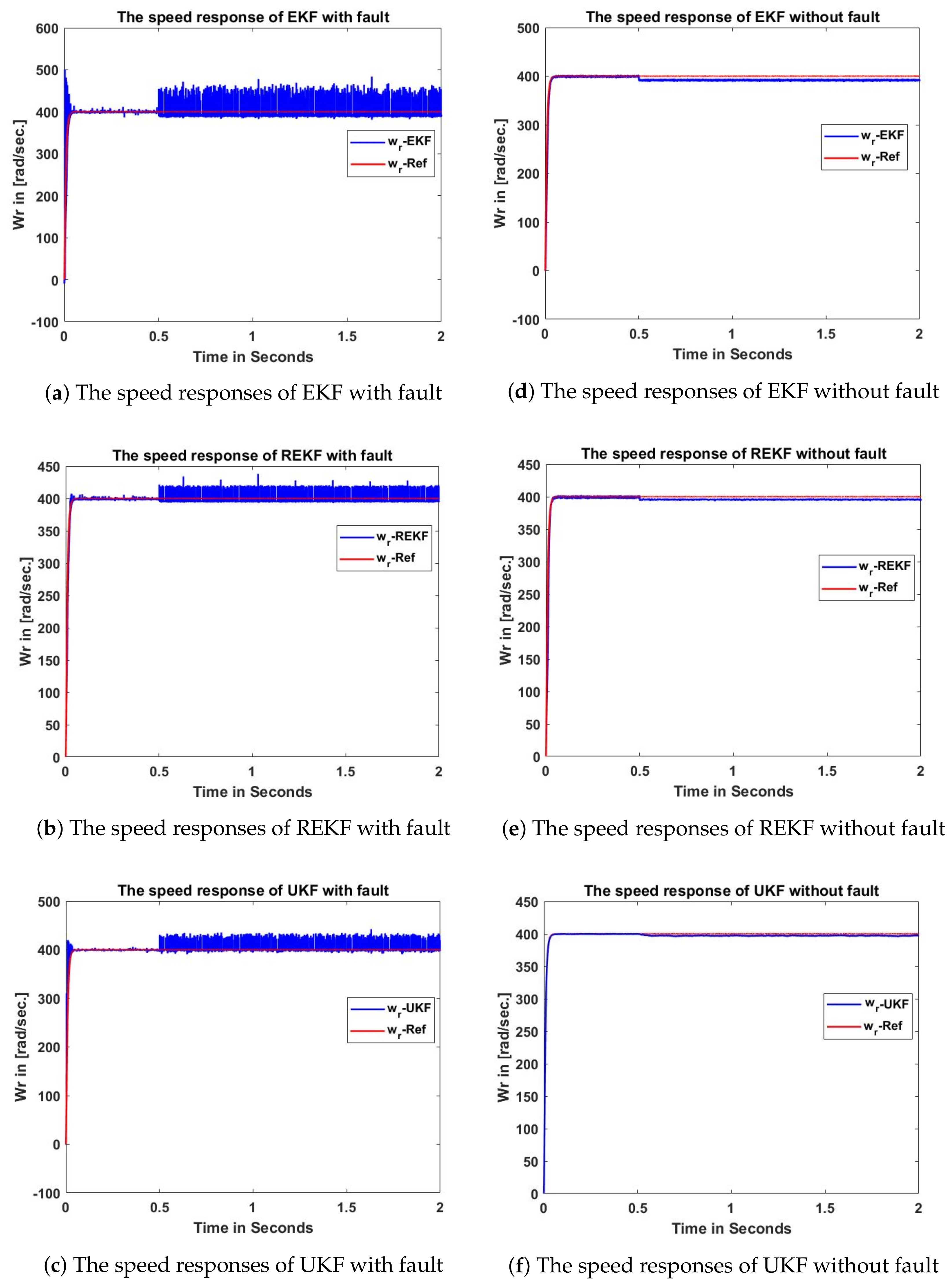
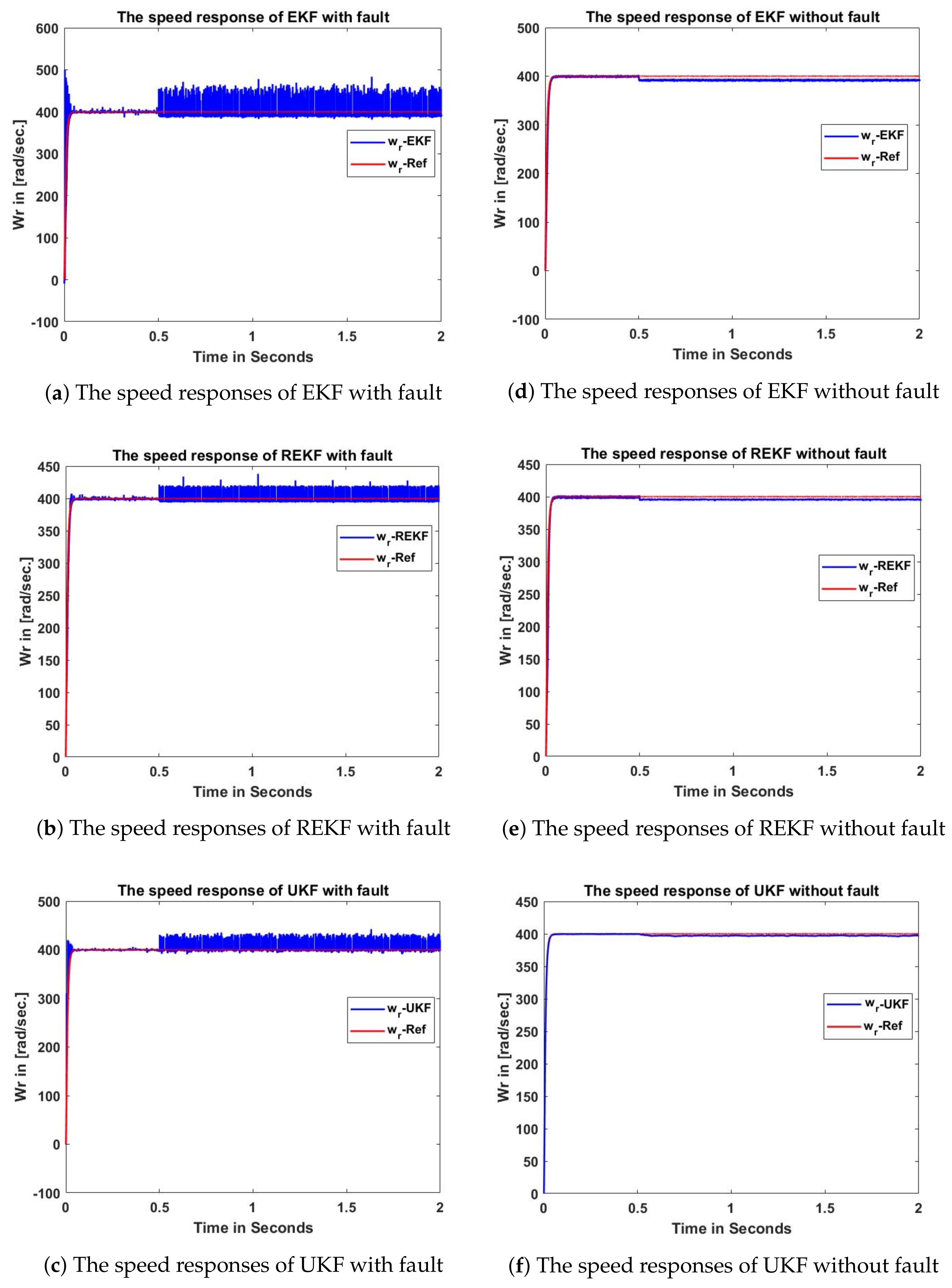
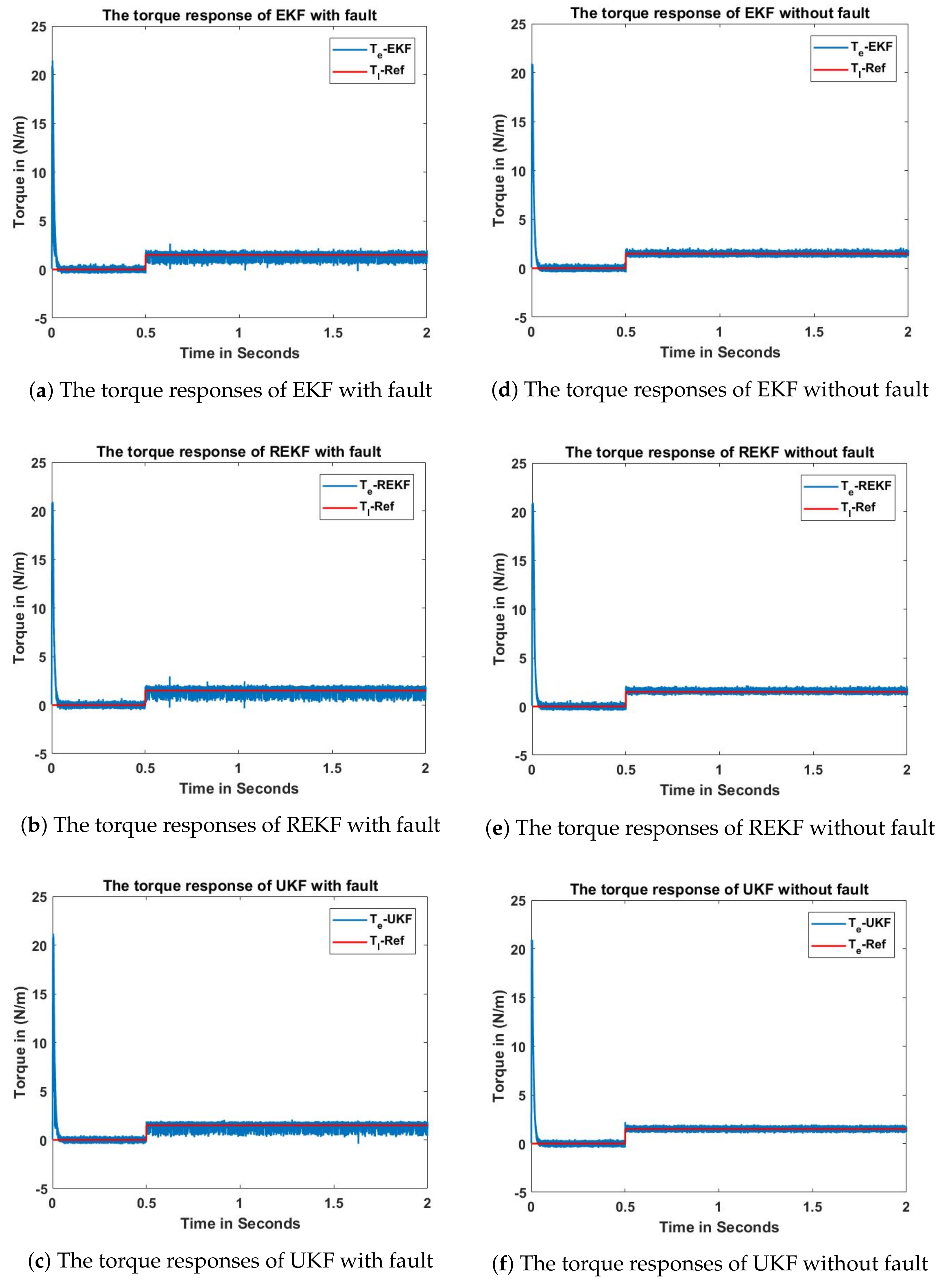
5. Computer Simulation Studies and Hardware Implementations
6. Conclusions
Author Contributions
Conflicts of Interest
Nomenclature
| and | 3-phase currents and voltages |
| stator resistance, inductance, current and voltage | |
| direct and quadrature axis voltages | |
| direct and quadrature axis currents | |
| stator and rotor magnetic flux linkages | |
| direct and quadrature axis flux linkages | |
| and axis flux linkages | |
| direct and quadrature axis inductances | |
| electrical and mechanical angular speed | |
| P, J, D | number of pole, moment of inertia, and viscous friction coefficient |
| electrical angular position | |
| electrical, load, estimated, and reference torques | |
| computed angular position | |
| digitized variables for flux and torque controller | |
| flux and torque tolerance bands | |
| , | priori covariance and priori state estimate |
| posteriori covariance matrix | |
| estimated state variable | |
| Kalman gain | |
| , | process and measurement noise |
| covariance matrix of process and measurement noise at the time step | |
| scalar binary random variables following the Bernoulli-distribution | |
| additive uncertainty in Kalman gain | |
| cross-correlation matrix | |
| sigma points | |
| weighing coefficients |
References
- Xu, Z.; Rahman, M.F. Direct Torque and Flux Regulation of an IPM Synchronous Motor Drive Using Variable Structure Control Approach. IEEE Trans. Power Electron. 2007, 22, 2487–2498. [Google Scholar]
- Cunha, J.P.V.S.; Costa, R.R.; Lizarralde, F.; Hsu, L. Peaking free variable structure control of uncertain linear systems based on a high-gain observer. Automatica 2009, 45, 1156–1164. [Google Scholar] [CrossRef]
- Paicu, M.C.; Boldea, I.; Andreescu, G.D.; Blaabjerg, F. Very low speed performance of active flux based sensorless control: interior permanent magnet synchronous motor vector control versus direct torque and flux control. IET Electr. Power Appl. 2009, 3, 551–561. [Google Scholar] [CrossRef]
- Boazzo, B.; Pellegrino, G. Model-Based Direct Flux Vector Control of Permanent-Magnet Synchronous Motor Drives. IEEE Trans. Ind. Appl. 2015, 51, 3126–3136. [Google Scholar] [CrossRef]
- Drobnic, K.; Nemec, M.; Nedeljkovic, D.; Ambrozic, V. Predictive Direct Control Applied to AC Drives and Active Power Filter. IEEE Trans. Ind. Electron. 2009, 56, 1884–1893. [Google Scholar] [CrossRef]
- Noguchi, T.; Takahashi, I. Quick torque response control of an induction motor based on a new concept. IEEJ Tech. Meeting Rotating Mach 1984, 1, 61–70. [Google Scholar]
- Takahashi, I.; Noguchi, T. A new quick-response and high-efficiency control strategy of an induction motor. IEEE Trans. Ind. Appl. 1986, IA-22, 820–827. [Google Scholar] [CrossRef]
- Rahman, M.F.; Zhong, L.; Haque, M.E.; Rahman, M.A. A direct torque-controlled interior permanent-magnet synchronous motor drive without a speed sensor. IEEE Trans. Energy Conver. 2003, 18, 17–22. [Google Scholar] [CrossRef]
- Haque, M.E.; Rahman, M.F. Incorporating control trajectories with the direct torque control scheme of interior permanent magnet synchronous motor drive. IET Electr. Power Appl. 2009, 3, 93–101. [Google Scholar] [CrossRef]
- Boldea, I.; Paicu, M.C.; Andreescu, G.D.; Blaabjerg, F. Active Flux DTFC-SVM Sensorless Control of IPMSM. IEEE Trans. Energy Conver. 2009, 24, 314–322. [Google Scholar] [CrossRef]
- Faiz, J.; Mohseni-Zonoozi, S.H. A novel technique for estimation and control of stator flux of a salient-pole PMSM in DTC method based on MTPF. IEEE Trans. Ind. Electron. 2003, 50, 262–271. [Google Scholar] [CrossRef]
- Buja, G.S.; Kazmierkowski, M.P. Direct torque control of PWM inverter-fed AC motors—A survey. IEEE Trans. Ind. Electron. 2004, 51, 744–757. [Google Scholar] [CrossRef]
- Mohamed, Y.A.R.I. A Newly Designed Instantaneous-Torque Control of Direct-Drive PMSM Servo Actuator With Improved Torque Estimation and Control Characteristics. IEEE Trans. Ind. Electron. 2007, 54, 2864–2873. [Google Scholar] [CrossRef]
- Mohamed, Y.A.R.I. Direct Instantaneous Torque Control in Direct Drive Permanent Magnet Synchronous Motors: a New Approach. IEEE Trans. Energy Conver. 2007, 22, 829–838. [Google Scholar] [CrossRef]
- Boldea, I.; Agarlita, S.C. The active flux concept for motion-sensorless unified AC drives: A review. In Proceedings of the 2011 International Aegean Conference on Electrical Machines and Power Electronics and 2011 Electromotion Joint Conference (ACEMP), Istanbul, Turkey, 8–10 September 2011; pp. 1–16. [Google Scholar]
- Vyncke, T.J.; Boel, R.K.; Melkebeek, J.A.A. A comparison of stator flux linkage estimators for a direct torque controlled PMSM drive. In Proceedings of the 35th Annual Conference of IEEE Industrial Electronics (IECON ’09), Porto, Portugal, 3–5 November 2009; pp. 971–978. [Google Scholar]
- Inoue, Y.; Morimoto, S.; Sanada, M. Control Method Suitable for Direct-Torque-Control-Based Motor Drive System Satisfying Voltage and Current Limitations. IEEE Trans. Ind. Appl. 2012, 48, 970–976. [Google Scholar] [CrossRef]
- Xu, Z.; Rahman, M.F. Comparison of a Sliding Observer and a Kalman Filter for Direct-Torque-Controlled IPM Synchronous Motor Drives. IEEE Trans. Ind. Electron. 2012, 59, 4179–4188. [Google Scholar] [CrossRef]
- Mercorelli, P. A Two-Stage Sliding-Mode High-Gain Observer to Reduce Uncertainties and Disturbances Effects for Sensorless Control in Automotive Applications. IEEE Trans. Ind. Electron. 2015, 62, 5929–5940. [Google Scholar] [CrossRef]
- Bernardes, T.; Montagner, V.F.; Gründling, H.A.; Pinheiro, H. Discrete-Time Sliding Mode Observer for Sensorless Vector Control of Permanent Magnet Synchronous Machine. IEEE Trans. Ind. Electron. 2014, 61, 1679–1691. [Google Scholar] [CrossRef]
- Xu, Z.; Rahman, M.F. An extended Kalman filter observer for the direct torque controlled interior permanent magnet synchronous motor drive. In Proceedings of the Fifth International Conference on Power Electronics and Drive Systems, Singapore, 17–20 November 2003; pp. 686–691. [Google Scholar]
- Xu, Z.; Rahman, M.F. Sensorless sliding mode control of an interior permanent magnet synchronous motor based on extended Kalman filter. In Proceedings of the Fifth International Conference on Power Electronics and Drive Systems, Singapore, 17–20 November 2003; pp. 722–727. [Google Scholar]
- Foo, G.; Sayeef, S.; Rahman, M.F. SVM direct torque controlled interior permanent magnet synchronous motor drive using an extended Kalman Filter. In Proceedings of the 4th IET Conference on Power Electronics, Machines and Drives, York, UK, 2–4 April 2008; pp. 712–716. [Google Scholar]
- Vyncke, T.J.; Boel, R.K.; Melkebeek, J.A.A. On Extended Kalman Filters with augmented state vectors for the stator flux estimation in SPMSMs. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 1711–1718. [Google Scholar]
- Mercorelli, P. A Hysteresis Hybrid Extended Kalman Filter as an Observer for Sensorless Valve Control in Camless Internal Combustion Engines. IEEE Trans. Ind. Appl. 2012, 48, 1940–1949. [Google Scholar] [CrossRef]
- Mercorelli, P. A Two-Stage Augmented Extended Kalman Filter as an Observer for Sensorless Valve Control in Camless Internal Combustion Engines. IEEE Trans. Ind. Electron. 2012, 59, 4236–4247. [Google Scholar] [CrossRef]
- Vyncke, T.J.; Boel, R.K.; Melkebeek, J.A.A. On the stator flux linkage estimation of an PMSM with Extended Kalman Filters. In Proceedings of the 5th IET International Conference on Power Electronics, Machines and Drives (PEMD 2010), Brighton, UK, 19–21 April 2010; pp. 1–6. [Google Scholar]
- Reif, K.; Gunther, S.; Yaz, E.; Unbehauen, R. Stochastic stability of the discrete-time extended Kalman filter. IEEE Trans. Autom. Control 1999, 44, 714–728. [Google Scholar] [CrossRef]
- Reif, K.; Gunther, S.; Yaz, E.; Unbehauen, R. Stochastic stability of the continuous-time extended Kalman filter. IEE Proc. Control Theory Appl. 2000, 147, 45–52. [Google Scholar] [CrossRef]
- Haus, B.; Aschemann, H.; Mercorelli, P. Tracking Control of a Piezo-Hydraulic Actuator Using Input-Output Linearization and a Cascaded Extended Kalman Filter Structure. J. Franklin Inst. 2017. [Google Scholar] [CrossRef]
- Mercorelli, P. An adaptive and optimized switching observer for sensorless control of an electromagnetic valve actuator in camless internal combustion engines. Asian J. Control 2014, 16, 959–973. [Google Scholar]
- Chen, L.; Mercorelli, P.; Liu, S. A Kalman estimator for detecting repetitive disturbances. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005; Volume 3, pp. 1631–1636. [Google Scholar]
- Wang, X.; Yaz, E.E. Stochastically resilient extended Kalman filtering for discrete-time nonlinear systems with sensor failures. Int. J. Syst. Sci. 2014, 45. [Google Scholar] [CrossRef]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the Adaptive Systems for Signal Processing, Communications, and Control Symposium 2000 (AS-SPCC), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar]
- Wan, E.A.; Van Der Merwe, R. The Unscented Kalman Filter, Kalman Filtering and Neural Networks; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2002. [Google Scholar]
- Julier, S.; Uhlmann, J. A New extension of the Kalman filter to Nonlinear Systems. In Proceedings Volume 3068, Signal Processing, Sensor Fusion, and Target Recognition VI; International Symposium Aerospace/Defense Sensing, Simulation and Controls, SPIE: Orlando, FL, USA, 1997; pp. 182–193. [Google Scholar]
- Julier, S.; Uhlmann, J.K.; Durrant-Whyte, H.F. A new approach for filtering nonlinear systems. In Proceedings of the 1995 American Control Conference, Seattle, WA, USA, 21–23 June 1995; Volume 3, pp. 1628–1632. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H-Infinity, and Nonlinear Approaches, 1st ed.; Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Sectors (N) | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | ||
| Rated Power | 400 W |
| Rated Torque | 180 oz.in |
| Rated Voltage | 220 V |
| Rated Current | 2.7 A |
| Stator resistance, | |
| Stator inductance, | mH |
| Rotor magnetic flux, | Wb |
| Number of rotor poles, P | 8 |
| Moment of inertia, J |
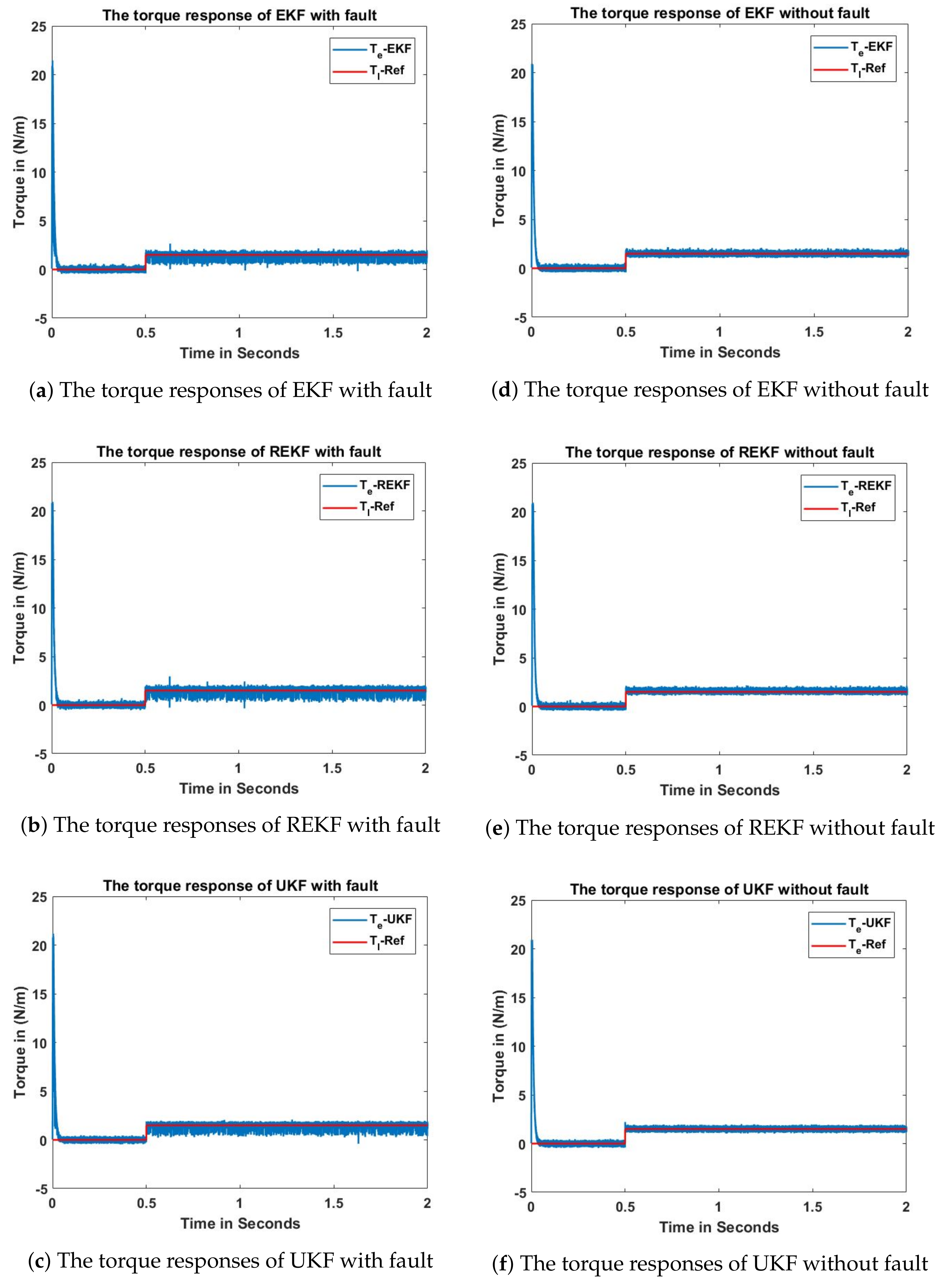
| Time Period (s) | EKF Estimation Error (N/m) | REKF Estimation Error (N/m) | UKF Estimation Error (N/m) |
|---|---|---|---|
| 0 s–0.5 s | 0.6089 | 0.6692 | 0.6675 |
| 0.5 s–1.0 s | 0.2188 | 0.1987 | 0.1348 |
| 1.0 s–1.5 s | 0.2180 | 0.1951 | 0.1653 |
| 1.5 s–2.0 s | 0.2197 | 0.1938 | 0.1067 |
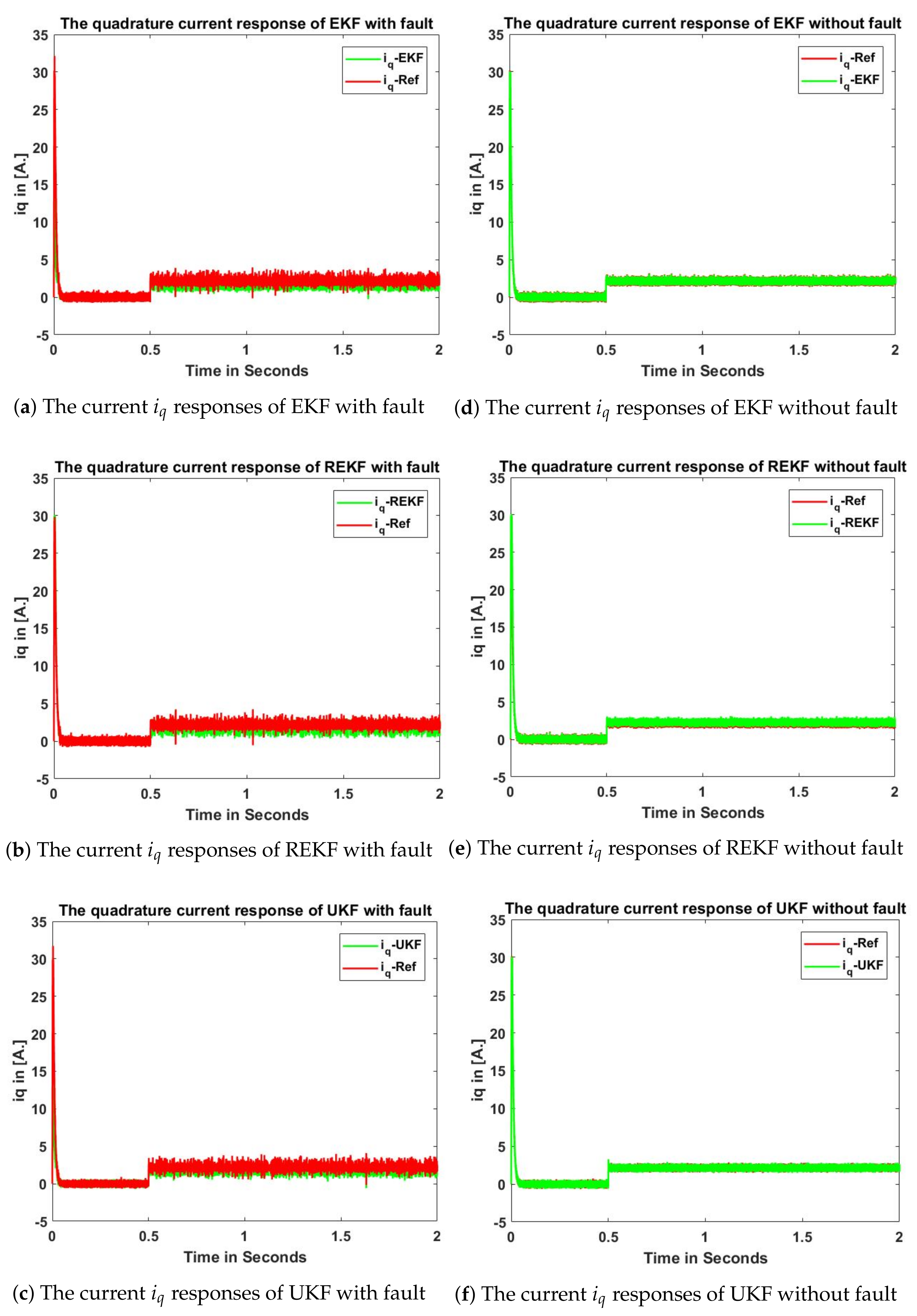
| Time Period (s) | EKF Estimation Error (A) | REKF Estimation Error (A) | UKF Estimation Error (A) |
|---|---|---|---|
| 0 s–0.5 s | 22.3889 | 22.4353 | 13.775 |
| 0.5 s–1.0 s | 0.3985 | 0.3629 | 0.1491 |
| 1.0 s–1.5 s | 0.3917 | 0.3718 | 0.2004 |
| 1.5 s–2.0 s | 0.3971 | 0.3619 | 0.1842 |
| Time Period (s) | EKF Estimation Error (rad/s) | REKF Estimation Error (rad/s) | UKF Estimation Error (rad/s) |
|---|---|---|---|
| 0 s–0.5 s | 10.7434 | 11.2876 | 1.7615 |
| 0.5 s–1.0 s | 4.3493 | 3.0354 | 0.5825 |
| 1.0 s–1.5 s | 4.3622 | 2.9833 | 0.7320 |
| 1.5 s–2.0 s | 4.3790 | 3.0036 | 0.7345 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.B.; Wang, X. Sensorless Direct Torque Control of Surface-Mounted Permanent Magnet Synchronous Motors with Nonlinear Kalman Filtering. Energies 2018, 11, 969. https://doi.org/10.3390/en11040969
Park JB, Wang X. Sensorless Direct Torque Control of Surface-Mounted Permanent Magnet Synchronous Motors with Nonlinear Kalman Filtering. Energies. 2018; 11(4):969. https://doi.org/10.3390/en11040969
Chicago/Turabian StylePark, Joon B., and Xin Wang. 2018. "Sensorless Direct Torque Control of Surface-Mounted Permanent Magnet Synchronous Motors with Nonlinear Kalman Filtering" Energies 11, no. 4: 969. https://doi.org/10.3390/en11040969
APA StylePark, J. B., & Wang, X. (2018). Sensorless Direct Torque Control of Surface-Mounted Permanent Magnet Synchronous Motors with Nonlinear Kalman Filtering. Energies, 11(4), 969. https://doi.org/10.3390/en11040969