Abstract
High range resolution (HRR) profiling using stepped-frequency pulse trains suffers from range shift and the attenuation/dispersion of range profiles while the target of interest is moving. To overcome these two drawbacks, a new algorithm based on the maximum likelihood (ML) estimation is proposed in this paper. Without altering the conventional stepped-frequency waveform, this algorithm can estimate the target velocity and thereby compensate the phase errors caused by the target's motion. It is shown that the velocity can be accurately estimated and the range profile can be correctly reconstructed.
1. Introduction
High resolution radar is an area of vigorous research and development in recent years. It is known that radar's range resolution is inversely proportional to its bandwidth. Therefore, the increase in bandwidth correspondingly improves the radar's range resolution. However, the wideband radar pulses complicate the design of transmitters and receivers. Also, such radar receivers are subject to potential interference from other sources.
To overcome these drawbacks, Ruttenberg [1] introduced a kind of radar waveforms containing a train of pulses whose carrier frequencies were different from each other. In 1984, the stepped-frequency pulse trains, with the carrier frequency of each pulse shifting linearly at a constant step, were introduced by Einstein, T.H. [2]. The total bandwidth of the pulse train can be synthesized together and the high range resolution profile (HRRP) can be generated by the inverse discrete Fourier transform (IDFT). Since then, the stepped-frequency pulse trains have been widely used in high range resolution (HRR) radars.
As mentioned in [2–3], the stepped-frequency radars suffer from distortion arising from the target's motion. An uncompensated non-zero radial velocity is found to have two effects on the HRRP. The first one is the circular shift in the HRRP. The second effect is the attenuation and dispersion of the HRRP [2]. These effects degrade the performance of stepped-frequency radars. Recently, several investigations have been proposed to mitigate the distortion caused by target's motion. In [4], two effective methods called reverse-count method and amplitude-interpolating method were introduced to solve the range shift effect. However, the attenuation/dispersion effect was not taken into account. In [5], the distortion of the HRRP from a perturbed target was analyzed, and a numerical model was developed to simulate the distortion effects. A kind of phase-coded, stepped-frequency waveforms, which had lower Doppler sensitivity than the traditional ones, was introduced by Temple in [6]. In [7], two successive stepped-frequency pulse trains were used to eliminate the phase errors of the moving target. Li et al. [8] introduced a new method using multiple stepped-frequency pulse trains and the robust phase unwrapping theorem to estimate the range and the velocity of the target. However, the majority of these methods [6–8] focused on the technique trends, which needed transmitting and receiving new kinds of waveforms. As a result, their implementations on those traditional in-service stepped-frequency radars were restrained.
A new motion compensation algorithm, based on the maximum likelihood (ML) estimation, is provided in this paper. It will be shown that this algorithm can estimate the target's radial velocity accurately and reconstruct the distorted HRRP successfully. Without altering the conventional waveforms, the new algorithm can be implemented on the in-service stepped-frequency radars.
The remainder of this paper is organized as follows. In Section 2, the signal model of moving targets in stepped-frequency radar systems is formulated. In Section 3, the ML estimator of the radial velocity is derived. Then, using the fast Fourier transforms to reduce the computational load, the new algorithm is proposed. In Section 4, some numerical examples are given to demonstrate the performance of the proposed algorithm. Section 6 presents the conclusions drawn from this work.
2. Signal Model
A stepped-frequency pulse train is a series of pulses modulated with different carrier frequencies. The carrier frequency of the first pulse is fc and those of the rest N−1 subsequent pulses are fc+nΔf, n=1,2,…,N−1, where N is the number of pulses and Δf is the frequency step size. Then, the nth transmitted pulse is
where rect(·) is the rectangular function, T is the pulse width, Tr is the pulse repetition interval (PRI) and the amplitude of the transmitted pulse is supposed to be 1. Supposing that the target is an ideal point-like scatterer, and disregarding both the energy divergence on wave propagation paths and the variation of target's reflection factor, the nth received pulse is
where α is the amplitude of the received signal, c is the speed of light, wn(t) is the additive noise, R0 and VR are the initial range and radial velocity of the target. As in most studies on the stepped-frequency waveforms, it is assumed that VR is constant in the whole coherent processing interval (CPI), and the target range migration does not exceed cT/2, which is the rough resolution determined by a single pulse. Each pulse is demodulated with its corresponding carrier frequency, thus the baseband signal of the nth pulse is
The sample of the received baseband signal is
The first phase term of the right side of (3) is caused by the initial range of the target, and the second phase term is the additional phase term caused by the radial velocity. When the target and the radar are relatively stationary, i.e., VR=0, one can use the IDFT to estimate the target's range and to generate the HRRP. However, if the target and the radar are not relatively stationary, as mentioned in [2–3], the linear component of the additional phase term will cause the circular range shift and the quadratic component will cause the attenuation/dispersion of the range profiles. Both of them are significant distortions in using stepped-frequency pulse trains to generate the HRRP. However, once the Vr is able to be estimated, the additional phase term can be compensated, and the HRRP can be reconstructed as well.
Denoting
and
(3) can be re-written as
Supposing that a target is composed by K scatterers and the amplitude of the received pulse from each scatterer is αk, k = 0,1,…,K − 1, the baseband signal is
where ηk and μk are determined by the range and velocity of each scatterer as proposed in (4) and (5). Denoting Ωk= [1, ej(ηk1+μk12), ej(ηk2+μk22),…,ej(ηk(N−1)+μk(N−1)2)]T, where □T is the transpose operation, Equation (7) can be re-written in the matrix form, as
where g = [g0, g1,…, gN−1], w = [w0, w1,…, wN−1], α = [α0, α1,…,αK−1]T, and Ω = [Ω0, Ω1,…, ΩK−1].
3. Velocity Estimation and Motion Compensation
3.1. Maximum Likelihood Estimation of the Target Velocity
The motion compensation and range profiling of a moving target can be seen as the estimation of the scatterers' amplitudes, ranges, and velocities. According to (7), this problem is the same as the estimation of
through the observations vector g. Supposing that the noise is additive white Gaussian noise (AWGN), the ML estimation of
can be obtained by minimizing the following cost function:
where ‖□‖ denotes the Euclidean norm. Minimizing (9; with respect to α yields
where □H is the conjugate transpose operation. Substituting (10) into (9), we get
Then, the ML estimation of
can be achieved through
As assumed in the previous section, the radial velocity of each scatterer is the same. Thus, μ0 = μ1 = … = μK−1 = μ, and
Supposing that the number of pulses N□ 1 and the range intervals between the scatterers are larger than ΔR (the range resolution,
[3]), we have
where I is the identity matrix. Substitute (14) into (12), and then the ML estimation of
can be modified as
According to (5), the velocity of the target can be achieved as
So the quadratic phase term caused by radial velocity can be compensated through
And the total additional phase term caused by radial velocity can be compensated, as
Finally, the HRRP of the moving target can be generated by the IDFT of [x0′, x1′,…, xN−1′].
3.2. The Motion Compensation and Profile Reconstruction Algorithm
With the above-mentioned preparation, the motion compensation algorithm will be introduced in this section. If the number of scatterers K is supposed to be known, the ML estimation of the parameters are obtained as follows.
Firstly, the parameter μ is assumed to be known, as μ=μ′. Then, the additional quadratic phase term caused by radial velocity is compensated by using (17).
Secondly, the FFT is adopted to estimate the
in (15) or the purpose o reducing the computation load. The FFT is performed on the compensated signal vector g′, and the squares of amplitudes of the FFT results are calculated, as Fμ′ = ‖FFT(g′)‖2. The largest K components of vector Fμ′ are chosen, and their sum is denoted as Sμ′. The Sμ′ is a function of μ′. The estimation of
is the frequency corresponding to these largest K components.
Thirdly, the Sμ′ is maximized with respect to μ′. Then, the ML estimation of μ, denoted as μ̂, can be obtained through
where [VRmin, VRmax] is the search space of the target radial velocity.
Finally, the estimation of target radial velocity V̂R can be derived according to (16). Then, applying the first and second step given above, the
can be achieved. The α̂ is finally obtained through (10).
As the FFT is not exactly equivalent to the ML estimator of
in the second step, we call the above procedure the simplified ML estimation (SMLE). As long as the estimation of radial velocity is obtained, (18) can be used to compensate the motion effect. The IDFT can be performed on the compensated signal to generate the undistorted HRRP.
However, if the target is non-cooperative, the number of scatterers K cannot be supposed as a prior. Thus, one should estimate K before applying the SMLE algorithm proposed here. The minimum description length (MDL) criterion introduced by Schwarz [9] is adopted here to estimate the number of scatterers. Schwarz's approach is based on Bayesian arguments. It is assumed that each hypothesis of K can be assigned a prior probability, and proposed to select the K that yields the maximum posterior probability. Using the MDL criterion, the number of scatterers K can be obtained by
where
is the ML estimate o the parameters, and
is log-likelihood of the ML estimate of the parameters.
An example is introduced here to validate the MDL criterion in our topic. We consider a moving target including four scatterers. The number of pulses in the stepped-frequency train is 512, and the signal-to-noise ratio (SNR) is 0 dB. The SMLE algorithm is used to yield the ML estimation of parameters and the following values for the MDL criterion (see Table 1).

Table 1.
An example of the MDL criterion.
The minimum of the MDL is obtained, as expected, for the K = 4.
With the MDL criterion and the SMLE algorithm proposed above, the scatterer number and the velocity of the target of interest can be estimated iteratively as follows.
- Step 1
- Assume that the number of scatterers is K=1.
- Step 2
- Obtain scatterers' parameters by using SMLE.
- Step 3
- Calculate the MDL(K).
- Step 4
- Assume K=K+1, and repeat Step 2 and Step 3.
4. Numerical Examples
In this section, some numerical examples are given to show the performance of the proposed new algorithm. The noise is AWGN in all of these simulations, and the parameters of the radar waveform used in this section are shown in Table 2.
Table 2.
Parameters of the simulated stepped-frequency pulse train.
First, we consider a moving target including only one scatterer. The range and the velocity of the target are 128ΔR and 100m/s, respectively. The number of scatterers K is supposed to be known in this simulation and the SMLE algorithm is used to estimate the velocity of the target. 2000 Monte–Carlo trials are run. The results are presented in comparison with the Cramer–Rao bound (CRB) [10–11]. The accuracy of the estimated velocity is measured by the root mean square error (RMSE), defined as
, where Nr=2000. Figure 1 shows the simulation results of the SMLE for target velocity versus various SNR. For SNR of −10dB or higher, the SMLE algorithm reaches the optimum estimation accuracy.
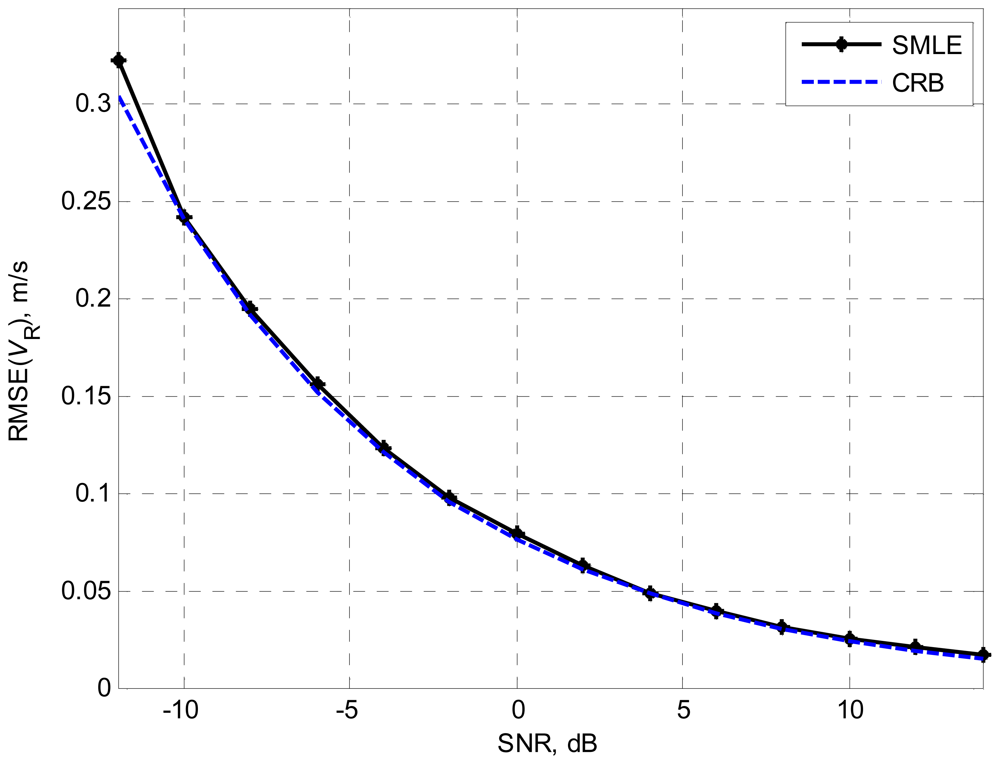
Figure 1.
Root mean square error of the target velocity versus SNR.
Another moving target including seven scatterers is considered. The ranges of the scatterers are 140ΔR, 153ΔR, 186ΔR, 195ΔR, 208ΔR, 251ΔR, and 258ΔR. Their amplitudes are 0.2, 0.3, 0.5, 0.7, 1.0, 0.7, and 0.2, respectively. And the target radial velocity is 100m/s.
The number of scatterers is obtained through the MDL criterion and the radial velocity is estimated by the SMLE. Simulation results are presented in Figure 2.
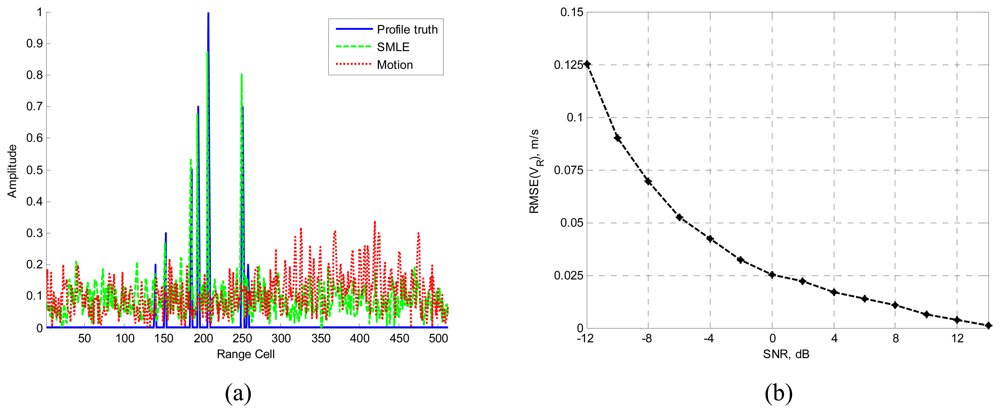
Figure 2.
Simulation results of the moving target including seven scatterers.
Figure 2(a) is the comparison between profile truth, profiling result with motion compensation and without motion compensation. The SNR is −5dB. It is shown that the profile result without motion compensation (the red dotted line) is badly attenuated and distorted, when compared with the profile truth with no motion (the blue solid line). However, the target velocity can be estimated through the algorithm proposed in this paper, and the HRRP is correctly reconstructed (the green dashed line). Figure 2(b) shows the accuracy of the estimated velocity.
5. Conclusion
In this paper, a new algorithm based on the ML estimation is proposed for HRR profiling of moving targets. This algorithm can be implemented on the in-service stepped-frequency radar systems, without changing their waveforms and system structures. The performance of this algorithm is guaranteed by the asymptotical optimality of the ML estimation [12]. The simulation results also show that the new algorithm can estimate the target velocity accurately and then reconstruct the HRRP correctly. Future work could include investigations into fast algorithms for the SMLE and how to extend this algorithm for maneuvering targets.
Acknowledgments
The authors would like to thank the anonymous reviewers for providing them with a large number of detailed suggestions for improving the manuscript.
References and Notes
- Ruttenberg, K.; Chanzit, L. High range resolution by means of pulse to pulse frequency shifting. EASCON '68 Record 47–51.
- Einstein, T.H. Generation of high resolution radar range profiles and range profile autocorrelation functions using stepped frequency pulse trains. In Project Report TT-54; Massachusetts Institute of Technology: Lincoln Laboratory, 1984; (AD-A149242). [Google Scholar]
- Wehner, D.R. High Resolution Radar; 1987; Artech House: Norwood, MA. [Google Scholar]
- Lei, W.; Long, T.; Han, Y.Q. Moving targets imaging for stepped frequency radar. The 5th International Signal Processing Proceedings 2000, 3, 1851–1855. [Google Scholar]
- Wong, S.K.; Duff, G.; Riseborough, E. Analysis of distortion in the high range resolution profile from a perturbed target. IEE Proceedings – Radar, Sonar and Navigation 2001, 148(6), 353–362. [Google Scholar]
- Temple, M.A.; Sitler, K.L.; Raines, R.A.; Hughes, J.A. High range resolution (HRR) improvement using synthetic HRR processing and stepped-frequency polyphase coding. IEE Proceedings – Radar, Sonar and Navigation 2004, 151(1), 41–47. [Google Scholar]
- Chen, H.; Liu, Y.; Jiang, W.; Guo, G. A new approach for synthesizing the range profile of moving targets via stepped-frequency waveforms. IEEE Geoscience and Remote Sensing Letters 2006, 3(3), 406–409. [Google Scholar]
- Li, G.; Meng, H.D.; Xia, X.G.; Peng, Y.N. Range and velocity estimation of moving targets using multiple stepped-frequency pulse trains. Sensors 2008, 8, 1343–1350. [Google Scholar]
- Schwarz, G. Estimating the dimension of a model. The Annals of Statistics 1978, 6(2), 461–464. [Google Scholar]
- Peleg, S.; Porat, B. The Cramer–Rao lower bound for signals with constant amplitude and polynomial phase. IEEE Transactions on Signal Processing 1991, 39(3), 749–752. [Google Scholar]
- Ristic, B.; Boashash, B. Comments on “The Cramer–Rao lower bounds for signals with constant amplitude and polynomial phase”. IEEE Transaction on Signal Processing 1998, 46(6), 1078–1079. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; 1993; Prentice-Hall. [Google Scholar]
© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).