
Spaceborne LiDAR Systems: Evolution, Capabilities, and Challenges

 ,
,  , , , and
, , , and
Abstract
1. Introduction
2. Basic Principle and Functionality
2.1. Instrument Configuration and Signal Detection
2.1.1. Transmitter Subsystem
- Laser wavelength [nm]: Commonly selected based on the application’s sensing requirements.
- Pulse repetition frequency (PRF) [Hz]: PRF refers to the number of laser pulses emitted per second. This parameter directly influences spatial resolution and ground sampling density. Although higher PRFs enable denser sampling, they also increase power demand and thermal load. Spaceborne systems typically operate at up to 20 kHz.
- Laser pulse energy [mJ]: Pulse energy determines the system’s ability to detect weak returns from distant or low-reflectance surfaces. Higher energies support longer-range and optically complex measurements (e.g., dense clouds or thick vegetation canopies) but require greater power and thermal control. Typical values for spaceborne LiDARs range from 1 to 100 mJ.
- No. of laser beams [-]: The number of laser beams affects swath width, spatial resolution, and data redundancy. While early missions such as LITE and GLAS employed single-beam configurations, more recent systems such as ATLAS and GEDI utilised multiple beams—typically six or eight—to enhance coverage and efficiency.
2.1.2. Receiver Subsystem
- Field of view (FOV) [rad]: The FOV is the angular range over which the LiDAR system can detect backscattered light and is typically in the range of (100–1000) rad. A wider FOV can capture more scattered light but may also increase background noise, affecting the signal-to-noise ratio (SNR).
- Quantum efficiency (QE) [%]: Probability that an incident photon generates a photoelectron.
- Photon detection efficiency (PDE) [%] is a variable that describes the probability that a photon will be detected and is mainly dependent on the quantum efficiency of the detector semiconductor material and the arrangement of the sensors.
- Dead time [ns] is the period immediately after detecting a photon during which the detector cannot register another photon. A short dead time allows the detector to be ready to detect another photon more quickly, enhancing the counting rate and efficiency.
- Timing jitter [ps]: A low jitter is essential for applications requiring precise timing measurements, such as time-correlated single photon counting (TCSPC). Jitter refers to the variability in timing accuracy when detecting photons. Reducing jitter improves the temporal resolution of measurements, which is crucial for accurately determining the time of arrival of photons.
- Dark count rate [counts per second]: The dark count rate measures the number of false counts detected by the sensor, essentially background noise. Minimizing this rate leads to achieving high signal-to-noise ratios in sensitive applications, allowing for detecting very low levels of light without significant interference from the detector itself.
2.2. LiDAR Equation
- is the power received from a distance R.
- K is a constant factor.
- describes the geometric spreading (like fall-off due to spreading loss).
- is the backscatter coefficient at a distance R.
- propagation medium transmission factor.
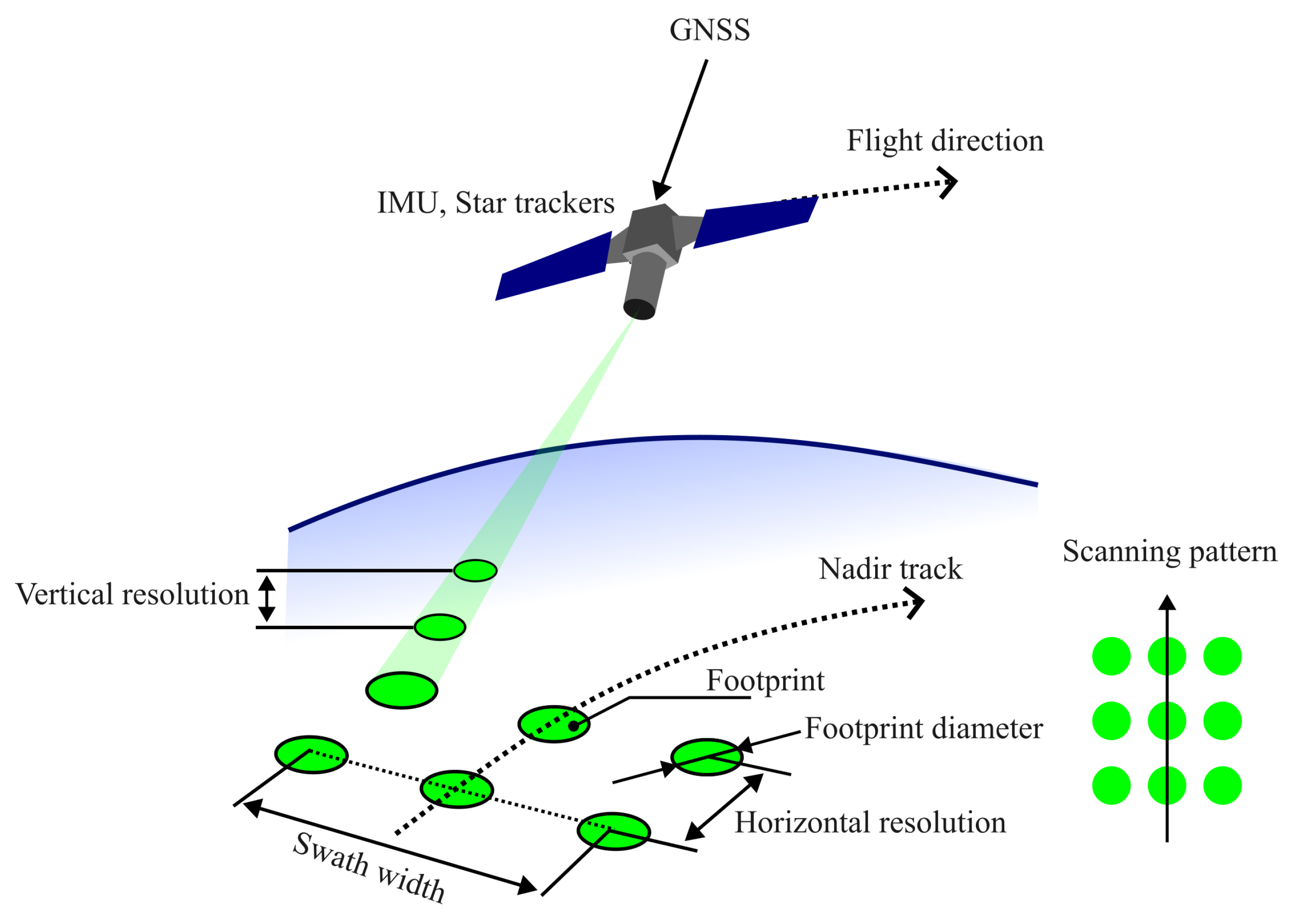
2.3. Key System Parameters
- Footprint diameter: The footprint diameter is the size of the area on Earth’s surface that a single LiDAR pulse illuminates and measures. The footprint size influences the spatial resolution and the ability to detect fine-scale features on the Earth’s surface.
- Horizontal resolution: The horizontal resolution is the smallest resolvable distance between two footprints, and is typical;y in the range of hundreds of meters. The higher spatial resolution allows for more detailed mapping and analysis of surface features.
- Vertical resolution: The vertical resolution is the smallest resolvable distance in the vertical direction. It depends on the application: hundreds of meters for atmospheric detection (aerosol/cloud layers) and tens of centimeters for altimetry (surface elevation and structure measurements). The improved vertical resolution improves the ability to profile atmospheric layers and surface topography.
- Accuracy: The accuracy of spaceborne LiDAR measurements depends on various factors, including the calibration of the LiDAR system, atmospheric conditions, and surface reflectance properties. Accurate calibration and correction for atmospheric effects are crucial for reliable measurements.
- Scanning pattern: The scanning pattern is the pattern in which the LiDAR system scans the ground and can be a raster or a swath pattern. The choice of scan pattern affects the coverage area and the density of data points collected.
- The LiDAR coverage/swath width: The swath width determines the LiDAR coverage. A wider swath width increases the coverage area but may reduce spatial resolution.
- Signal-to-noise ratio (SNR): SNR is critical to determining the detection capability and precision of a LiDAR system. Higher SNRs indicate more reliable and precise measurements, influencing the overall quality of the data products.
3. Types of LiDARs
- Atmospheric backscattering LiDARs.
- Differential absorption LiDARs (DIALs).
- Doppler (wind) LiDARs.
- Ranging and altimeter LiDARs.
- Full-waveform LiDARs.
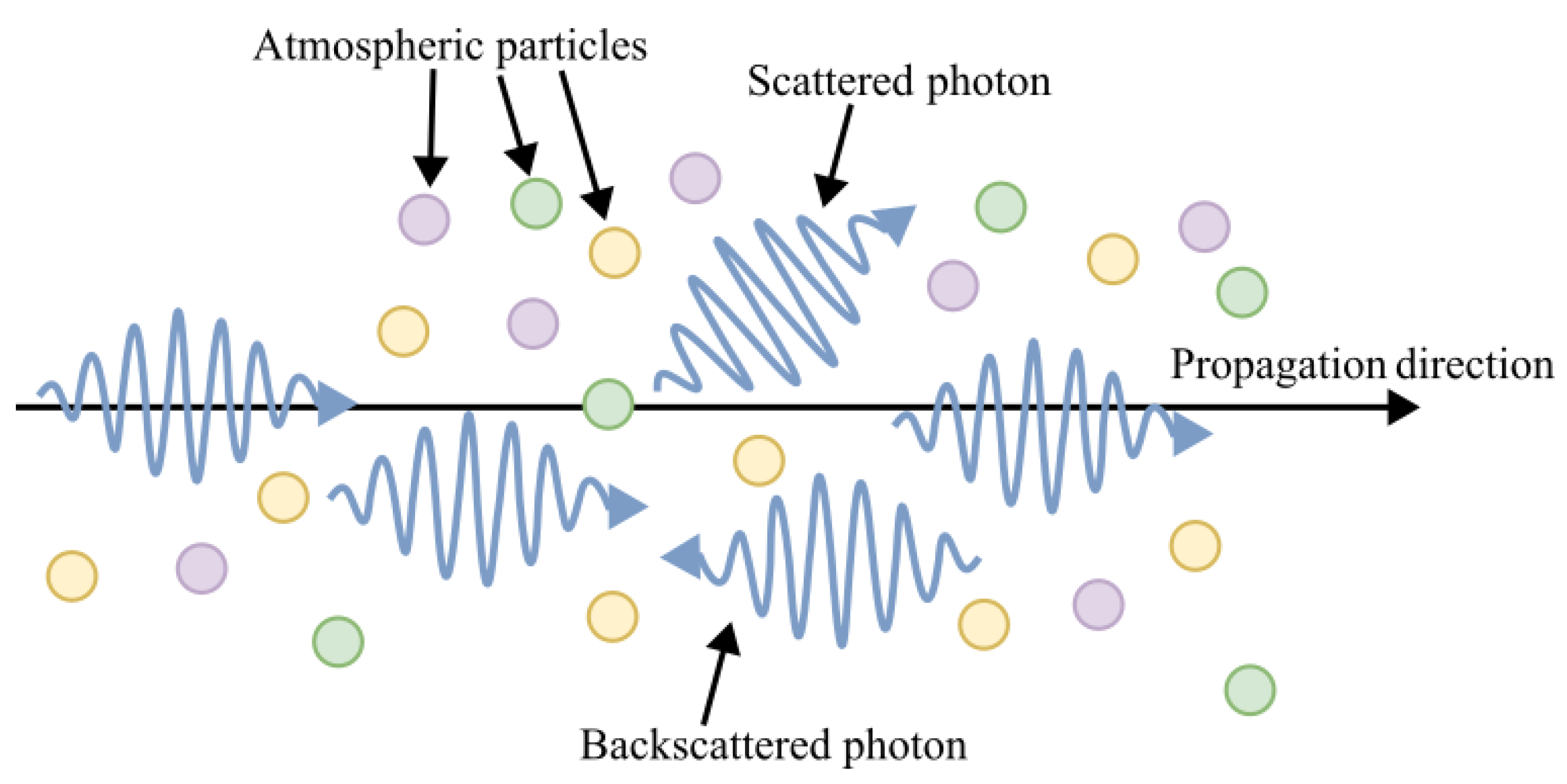
3.1. Atmospheric Backscattering LiDAR
3.2. Types of Atmospheric Scattering
- Elastic scattering —The wavelength of the scattered light remains unchanged. Elastic LiDAR does not detect specific chemicals. Instead, it measures how different gases, particles, and aerosols scatter light. This helps identify areas where the atmosphere changes, such as differences in density, humidity, dust, and pollution [70,74,78].
- Mie scattering occurs when particle sizes are similar to or larger than the wavelength of light (e.g., dust, water droplets, aerosols, molecules and ) and scale with the where d is the diameter of the particle. It is dominant in the lower atmosphere, where larger particles are present [72,82,83,84].
- Rayleigh scattering is the scattering of light by particles much smaller than the wavelength of the light (e.g., dust, pollen, smoke, and water vapor). The intensity of Rayleigh scattering is inversely proportional to the fourth power of the wavelength with factor . This means that shorter wavelengths (such as 355 nm) are scattered much more strongly than longer wavelengths (such as 1064 nm) [35] and are more predominant in the upper parts of the atmosphere [72,82,83,84].
3.3. HSRL—High-Spectral-Resolution LiDAR
3.4. Diferential Absorption LiDARs
3.5. Doppler (Wind) LiDAR
3.6. The Ranging and Altimeter
3.7. Full-Waveform LiDAR
4. Challenges and Limitations
- Transmitter design challenges: The transmitter laser has every component, including the laser resonator, with elements such as laser crystals, Q-switches, harmonic generator crystals, wave plates, mirrors, and other optical components. These components must meet operational lifetime without worsening performance [24]. One solution to this challenge can be component redundancy; for example, the LITE laser transmitter deployed two identical lasers, and the GLAS laser transmitter uses three identical lasers that do not operate simultaneously [21,104].
- Spatial resolution: Compared to other remote sensing techniques, LiDARs suffer from low spatial resolution. For example, NASA’s GEDI LiDAR uses 25 m diameter laser footprints spaced 60 m apart along the track (and 600 m across the track) which yields a sparse sampling of the surface rather than a continuous image. In contrast, passive optical satellites can achieve much finer horizontal resolution: commercial imagers like WorldView-3 have pixels as small as 0.31 m [105,106].
- Spatial coverage: LiDAR is distinguished as having relatively small coverage and swath width. For comparison, Landsat-9 (passive, optical) has a swath area of 185 kilometers (km), covering the whole world every 16 days. Sentinel-1 (active radar) has a swath area of 290 km, covering the whole world every 6 days. GEDI has the widest spaceborne LiDAR swath with 4.2 km, making it possible to cover about 2–4% of the land during its 2-year mission [18,107].
- Weather dependency: Laser light in the visible to near-infrared spectrum is strongly affected by clouds, rain, and other atmospheric conditions that can scatter or absorb the laser pulses. In contrast, SAR operates in the microwave region, which is largely unaffected by such conditions, allowing it to “see” through clouds and perform reliably in almost any weather [108].
- Multiple scattering signals: Cloud and aerosol measurements are complicated by multiple scattering phenomena that require complex correction algorithms [109].
5. LiDAR in Space Missions
5.1. Spaceborne LiDARs for Terrestrial Applications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission | Agency | Deployment Platform | Launch Year | LiDAR Instrument | Status | Primary Objective | Cit |
|---|---|---|---|---|---|---|---|
| STS-64 | NASA | Space Shuttle Discovery | 1994 | LITE | Completed in 1994 | Test of the spaceborne LiDAR and its related key technologies, investigate the molecular atmosphere, aerosols and clouds | [7,16] |
| ICESat | NASA | ICESat | 2003 | GLAS | Completed in 2009 | Measure ice sheet mass balance: the difference between an ice sheet’s snow input, and the ice loss through melting, ablation, or calving | [60,116] |
| CALIPSO | NASA, CNES | CALIPSO | 2006 | CALIOP | Completed in 2023 | Study the role that clouds and aerosols play in regulating Earth’s weather, climate and air quality | [73,117,118,119] |
| CATS | NASA | ISS | 2015 | CATS | Completed in 2017 | Extend global LiDAR climate observations, measure range-resolved profiles of atmospheric aerosol and cloud distributions and properties, testing new LiDAR technologies | [120,121] |
| ADM-Aeolus | ESA | ADM-Aeolus | 2018 | ALADIN | Completed in 2023 | Provide global observations of wind profiles with a vertical resolution that meets the accuracy requirements of the World Meteorological Organization (WMO) | [122,123] |
| ICESat-2 | NASA | ICESat-2 | 2018 | ATLAS | Active | Measure polar ice sheet mass balance, sea ice thickness, and vegetation canopy height better to understand climate change and its impacts | [124] |
| GEDI | NASA | ISS | 2018 | GEDI | Paused | Optimized to measure ecosystem structure - determine how changing climate and land-use impact ecosystem structure and dynamics. Measurement of the canopy structure, biomass and topography. | [107] |
| Daqi-1 | CNSA | Daqi-1 | 2022 | ACDL | Active | First HSRL in space. Measure aerosol profiles and greenhouse gas () concentrations | [125] |
| Goumang | CAST, CRESDA | Goumang | 2022 | LiDAR | Active | Designed for forest carbon sink observation using both LiDAR and passive sensors. Increase the accuracy and efficiency of carbon dioxide measurements. Detect vegetation biomass, atmospheric aerosols, and chlorophyll fluorescence to view the carbon cycle comprehensively. | [126] |
| EarthCARE | ESA, JAXA | EarthCARE | 2024 | ATLID | Active | Observe the vertical profiles of natural and anthropogenic aerosols globally, including their radiative properties and interactions with clouds. Observe the vertical distributions of atmospheric liquid water and ice globally, their transport by clouds, and their radiative impact. Retrieve profiles of atmospheric radiative heating and cooling by combining the retrieved aerosol and cloud properties | [127,128] |
| Instrument | Type | PRF [Hz] | No. Lasers | No. Beams | Channels | Laser e. [mJ] | H. Res 1 [m] | V. Res 1 [m] | Footprint Diameter [m] | Swadth Width | Detector Mode | Detector | Source |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| LITE | AB | 10 | 2 | 1 | 1064 | 470,440 | 740 | 15 | 290, 470 | - | Waveform | APD | [16,20,104] |
| 532 | 530,560 | Waveform | PMT | ||||||||||
| 355 | 170,160 | Waveform | PMT | ||||||||||
| GLAS | Altimeter | 40 | 3 | 1 | 1064 | 75 | ∼170 | 0.15 | ∼70 | - | PC | APD | [60,116,129,130] |
| AB | 532 | 35 | 78.6 | PC | PMT | ||||||||
| CALIOP | AB | 20.16 | 2 | 1 | 1064 | 110 | 333 | 30 | ∼70 | - | Waveform | APD | [73,131,132] |
| 532 | Waveform | PMT | |||||||||||
| 532 | Waveform | PMT | |||||||||||
| CATS | AB + HSRL | 4000 2 | 2 | 1 2 | 1064 | 2 2 | 350 | 60 | ∼14.38 | - | PC | N/A | [120,133,134] |
| 532 | PC | N/A | |||||||||||
| ALADIN | Doopler | 50 | 1 | 1 | 355 | 80 | ∼87,000 | 250 m | - | - | N/A | CCD | [135] |
| ATLAS | Altimeter | 10,000 | 2 | 6 | 532 | 0.2–1.2 | 0.7 | N/A | ∼13 | 6600 | PC | PMT | [124] |
| GEDI | full-waveform | 242 | 3 | 8 | 1064 | 10 | 60 | N/A | 25 | 4200 | Waveform | Si:APD | [136,137] |
| ACDL | HSRL | 40 | N/A | N/A | 1572 | N/A | N/A | 24 | 70 | N/A | N/A | PMT | [125] |
| 1064 | 180 | ||||||||||||
| 532 | 130 | ||||||||||||
| Goumang | full-waveform | 40 | N/A | 5 | 1064 | - | N/A | N/A | N/A | N/A | N/A | [138] | |
| ATLID | HSRL | 51 | 1 | 1 | 355 | 38 | 10 km | 100,300 | N/A | - | - | CCD | [139,140,141] |
5.1.1. LITE—LiDAR In-Space Technology Experiment
5.1.2. GLAS—The Geoscience Laser Altimeter System
5.1.3. CALIOP—Cloud-Aerosol LiDAR with Orthogonal Polarization
5.1.4. CATS—The Cloud–Aerosol Transport System
5.1.5. ATLAS—Advanced Topographic Laser Altimeter System (ICESat-2)
5.1.6. GEDI—The Global Ecosystem Dynamics Investigation
5.2. Atmospheric Laser Doppler Instrument (ALADIN)
ATLID—Atmospheric LiDAR (ATLID)
5.3. Spaceborne LiDARs Beyond Earth
6. Applications and Outcomes from Spaceborne LiDAR Data
6.1. Atmospheric Applications
6.2. Vegetation and Ecosystem Monitoring
6.3. Climate Change and Cryospheric Monitoring
6.4. Bathymetry—Deriving Underwater Topography
7. The Future of the Spaceborne LiDARs
7.1. Future Missions
7.1.1. MERLIN
7.1.2. AEOLUS2
7.1.3. Multi-Footprint Observation LiDAR and Imager (MOLI)
7.1.4. Gualan
7.2. Future Contepts
7.2.1. Quantum LiDAR
7.2.2. Swath Mapping
7.2.3. LiDAR Sattelite Constalations
7.2.4. LiDAR as a CubeSat Playload
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADC | Analog-to-digital converters |
| AGB | Aboveground biomass |
| AOD | Aerosol Optical Depth |
| ALADIN | Atmospheric Laser Doppler Instrument |
| ATLAS | Advanced Topographic Laser Altimeter System |
| APD | Avalanche photodiode |
| CFD | Constant Fraction Discriminator |
| CALIOP | Cloud–Aerosol LiDAR with Orthogonal Polarization |
| CALIPSO | Cloud–Aerosol LIDAR and Infrared Pathfinder Satellite Observations |
| CATS | The Cloud–Aerosol Transport System |
| CCD | Charge Coupled Device |
| CALIPSO | Cloud–Aerosol LIDAR and Infrared Pathfinder Satellite Observations |
| CATS | The Cloud–Aerosol Transport System |
| CCD | Charge Coupled Device |
| C-WL | Coherent detection |
| CNES | Centre national d’études spatiales |
| CNSA | China National Space Administration |
| CRESDA | China Center for Resources Satellite Data and Application |
| DEM | Digital Elevation Model |
| DIAL | Differential Absorption LiDAR |
| DPSSL | Diode-Pumped Solid-State Lasers |
| D-WL | Direct detection |
| DTDS | Different Thermo-Dynamics Stability |
| ESA | European Space Agency |
| FOV | Field Of View |
| GEDI | The Global Ecosystem Dynamics Investigation |
| GLAS | The Geoscience Laser Altimeter System |
| HSRL | High-Spectral-Resolution LiDAR |
| IA | Interferometric Altimetry |
| ICESat | Ice, Cloud, and land Elevation Satellite |
| INSAR | Interferometric SAR |
| ISRO | India Space Agency |
| JAXA | Japan Aerospace Exploration Agency |
| LALT | Laser Altimeter |
| LIDAR | Light Detection and Ranging |
| LITE | LiDAR In-Space Technology Experiment |
| LRO | Lunar Reconnaissance Orbiter |
| MSG | Mars Global Surveyor |
| MESSENGER | Mercury Surface, Space Environment, Geochemistry, and Ranging |
| MLA | Mercury Laser Altimeter |
| NASA | National Aeronautics and Space Administration |
| NEAR Shoemaker | Near Earth Asteroid Rendezvous – Shoemaker |
| Nd:YAG | Neodymium-doped yttrium aluminum garnet |
| Nd:YVO4 | Neodymium-doped yttrium orthovanadate |
| N/A | Not Available |
| nW | nano-Watts |
| NIR | Near-Infrared |
| OL | Oceanic LiDAR |
| PBLH | Planetary Boundary Layer Height |
| PDE | Photon Detection Efficiency |
| PRF | Pulse Repetition Frequency |
| PMT | Photomultiplier tubes |
| REDD+ | Reducing Emissions from Deforestation and Forest Degradation |
| SDI | Strategic Defense Initiative |
| SiPMS | Silicon Photomultipliers |
| SNR | Signal-to-Noise Ratio |
| SO2 | Sulfur dioxide |
| SPAD | Single Photon Avalanche Diodes |
| TCSPC | Time-correlated single photon counting |
| UV | Ultraviolet |
| VIS | Visible |
| WMO | World Meteorological Organization |
Appendix A. LIDAR in Space Missions for Extraterrestrial Exploration
| Mission | Agency | Target Object | Launch Year | LiDAR | Status | Description/Objectives |
|---|---|---|---|---|---|---|
| Apollo 15, 16, 17 | NASA | Moon | 1971–1972 | Apollo laser altimeter | Completed | Measure the lunar shape parameters and infer its structure |
| Clementine | SDI, NASA | Moon, 1620 Geographos | 1994 | The Clementine LiDAR | Ended in 1994 (malfunction) | Technology demonstration (carry and test 15 advanced flight-test components and nine science instruments), create global topographic Model of the lunar landscape including polar regions. Attempt a rendezvous with the asteroid 1620 Geographos. |
| NEAR Shoemaker | NASA | Asteroid 253 Mathilde, Asteroid Eros | 1996 | NLR | Landed on EROS 12 February 2001, last contact on 28 February 2001 | Flyby of 253 Mathilde. Land on asteroid Eros, Gather data on its physical properties, mineral components, morphology, internal mass distribution, and magnetic field |
| MGS | NASA | Mars | 1996 | MOLA | Last contact 2006 | Precise topographic map of Mars, study of geophysics, geology, and atmospheric circulation, measurement of the radiance of the MARS surface. Study the formation and evolution of surface features such as volcanoes, basins, channels, and polar ice caps. Measure the altitude and distribution of water and carbon dioxide clouds to understand the volatile budget in the Martian atmosphere. |
| Hayabusa | JAXA | 2003 | Asteroid 25143 Itokawa | Hayabusa LiDAR | Reached the asteroid in 2005, returned back to The Earh in 2010 | Technology demonstration spacecraft, testing technologies for future missions including returning planetary samples to Earth, electrical propulsion, autonomous navigation, sampler, and reentry capsule. |
| MESSENGER | NASA | Mercury | 2004 | MLA | Ended in 2015 | Study the geology, magnetic field, and chemical composition of Mercury. Determine the surface composition of Mercury. Reveal the geological history of Mercury, discover details about Mercury’s internal magnetic field. Verify that Mercury’s polar deposits are dominantly water-ice |
| KAGUYA (SELENE) | JAXA | Moon | 2007 | LALT | Completed in 2009 | Obtain data on the lunar origin and evolution. Technology demonstrator for future lunar missions |
| Mission | Agency | Target Object | Launch Year | LiDAR Instrument | Status | Description/Objectives |
|---|---|---|---|---|---|---|
| Chang’E-1 | CNSA | The Moon | 2007 | Laser altimeter | Deorbited in 2009 | Create three-dimensional images of lunar landforms and outline maps of major lunar geological structures, including regions near the lunar poles. Analyze the abundance and distribution of up to 14 chemical elements across the lunar surface. Measure the depth of the lunar soil. Explore the space weather between Earth and the Moon. |
| Mars Phoenix | NASA | Mars | 2007 | Phoenix LiDAR | Landed on Mask in May 2008, Lost in November 2008 | Uncover the mysteries of the Martian Arctic, including the history of water and the search for complex organic molecules. |
| Chandrayaan-1 | ISRO | The Moon | 2008 | LLRI | Impacted the Moon in 2008, Last contact 2009 | Orbit the Moon and dispatch an impactor to the surface. Study the chemical, mineralogical, and photogeologic properties of the Moon. Confirm the presence of water molecules on the Moon using NASA’s Moon Mineralogy Mapper (M3) |
| LRO | NASA | Moon | 2009 | LOLA | Mission extended for the 5th time in 2022 | Create a 3D map of the Moon’s surface from lunar polar orbit. Identify potential landing sites and resources. Investigate the radiation environment. Prove new technologies for future missions. |
| Chang’E-2 | CNSA | Primary—Moon, Secondary —Earth–Sun L2 and asteroid 4179 Toutatis | 2010 | LAM | Lunar completed in 2011, Set to way to Earth–Sun L2 and later to asteroid 4179 Toutatis, lost contact in 2014 due to weakening signal caused by distance | Flight maneuver demonstrator—Demonstrate direct injection into the lunar-transfer orbit without first settling into an Earth orbit. Technology demonstrator —Demonstrate new technologies such as LDPC, high-speed data transmission, a new landing camera, and a micro CMOS camera. Topography mapping—Obtain 3D images of the lunar surface, explore the composition of lunar surface material, and observe the Earth-Moon and near-Moon space environment. Capture high-resolution images of the Sinus Iridum landing area. |
| Hayabusa2 | JAXA | Asteroid Ryugu, Asteroid 1998 KY26 | 2014 | LiDAR | Earth Flyby 2015, Arrival at Ryugu 2018, Rover Deployment 2018, Departure from Ryugu 2019, Landing on Earth 2020 | Collect samples from asteroid Ryugu. Deploy the first rovers to operate on an asteroid. Create an artificial crater to retrieve subsurface samples. Share samples with NASA for joint scientific analysis. |
| Mission | Agency | Target Object | Launch Year | LiDAR Instrument | Status | Description/Objectives |
|---|---|---|---|---|---|---|
| OSIRIS-REx | NASA | Bennu | 2016 | OLA | Delivered the sample to Earth in 2023 | Collect a sample from asteroid Bennu and deliver it to Earth. Study the collected sample to understand the building blocks of life and the history of the solar system |
| BepiColombo | ESA/JAXA | Mercury | 2018 | BELA | Arrival to Mercury in 2025 | Map Mercury’s surface topography and gather data on interior, exosphere, and magnetic field; a collaboration between ESA and JAXA. |
| Chandrayaan-2 | ISRO | The Moon | 2019 | Lander Laser Altimeter | Orbiter active lander lost contact when landing in 2019 | India’s first attempt for a soft landing on the Moon. Explore the unexplored South Pole of the Moon. Conduct detailed studies of topography, seismography, mineral identification and distribution, surface chemical composition, thermo-physical characteristics of top soil, and the composition of the lunar atmosphere. |
| JUICE | ESA | Jupiter system | 2023 | GALA | Arrival to Jupiter 2031 | Study Ganymede, Callisto, and Europa as planetary objects and possible habitats. Investigate Jupiter’s complex environment in depth. Examine the Jupiter system as an archetype for gas giants across the Universe. |
References
- Mehendale, N.; Neoge, S. Review on Lidar Technology. SSRN 2020. Available online: https://ssrn.com/abstract=3604309 (accessed on 22 February 2025).
- Cremons, D. The Future of Lidar in Planetary Science. Front. Remote Sens. 2022, 3, 1042460. [Google Scholar] [CrossRef]
- Waykar, Y.A. Lidar Technology: A Comprehensive Review and Future Prospects. JETIR 2022. Available online: https://www.jetir.org/papers/JETIR2207728.pdf (accessed on 22 February 2025).
- McManamon, P.F. LiDAR Technologies and Systems; SPIE Press: Bellingham, DC, USA, 2019; Available online: https://books.google.cz/books?id=1hQYywEACAAJ (accessed on 23 February 2025).
- Cheng, L.; Chen, S.; Liu, X.; Xu, H.; Wu, Y.; Li, M.; Chen, Y. Registration of Laser Scanning Point Clouds: A Review. Sensors 2018, 18, 1641. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Menenti, M. Challenges and Opportunities in Lidar Remote Sensing. Front. Remote Sens. 2021, 2. [Google Scholar] [CrossRef]
- McCormick, P.M. Airborne and Spaceborne Lidar. In Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere; Weitkamp, C., Ed.; Springer: New York, NY, USA, 2005; pp. 355–397. [Google Scholar] [CrossRef]
- Stitt, J.M.; Hudak, A.T.; Silva, C.A.; Vierling, L.A.; Vierling, K.T. Characterizing Individual Tree-Level Snags Using Airborne Lidar-Derived Forest Canopy Gaps within Closed-Canopy Conifer Forests. Methods Ecol. Evol. 2022, 13, 473–484. [Google Scholar] [CrossRef]
- Lohani, B.; Ghosh, S. Airborne LiDAR Technology: A Review of Data Collection and Processing Systems. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2017, 87, 567–579. [Google Scholar] [CrossRef]
- Štular, B.; Lozić, E.; Eichert, S. Airborne LiDAR-Derived Digital Elevation Model for Archaeology. Remote Sens. 2021, 13, 1855. [Google Scholar] [CrossRef]
- Barber, C.; Shortridge, A. Lidar Elevation Data for Surface Hydrologic Modeling: Resolution and Representation Issues. Cartogr. Geogr. Inf. Sci. 2005, 32, 401–410. [Google Scholar] [CrossRef]
- Canuto, M.A.; Estrada-Belli, F.; Garrison, T.G.; Houston, S.D.; Acuña, M.J.; Kováč, M.; Marken, D.; Nondédéo, P.; Auld-Thomas, L.; Castanet, C.; et al. Ancient Lowland Maya Complexity as Revealed by Airborne Laser Scanning of Northern Guatemala. Science 2018, 361, eaau0137. [Google Scholar] [CrossRef]
- Wang, L.; Niu, Z.; Li, J.; Chen, H.; Gao, S.; Wu, M.; Li, D. Generating Pseudo Large Footprint Waveforms from Small Footprint Full-Waveform Airborne LiDAR Data for the Layered Retrieval of LAI in Orchards. Opt. Express 2016, 24, 10142–10156. [Google Scholar] [CrossRef]
- Cracknell, A.P.; Hayes, L.W.B. Introduction to Remote Sensing, 2nd ed.; Taylor & Francis: Abingdon, UK, 2007. [Google Scholar]
- Qin, S.; Nie, S.; Guan, Y.; Zhang, D.; Wang, C.; Zhang, X. Forest emissions reduction assessment using airborne LiDAR for biomass estimation. Resour. Conserv. Recycl. 2022, 181, 106224. [Google Scholar] [CrossRef]
- Winker, D.M.; Couch, R.H.; McCormick, M.P. An Overview of LITE: NASA’s Lidar In-Space Technology Experiment. Proc. IEEE 1996, 84, 164–180. Available online: https://api.semanticscholar.org/CorpusID:62542354 (accessed on 1 March 2025). [CrossRef]
- NASA. ICESat-2: Advancing the Laser Legacy of Measuring Earth’s Polar Ice. 2018. Available online: https://icesat-2.gsfc.nasa.gov/ (accessed on 22 February 2025).
- Hancock, S.; McGrath, C.; Lowe, C.; Davenport, I.; Woodhouse, I. Requirements for a Global Lidar System: Spaceborne Lidar with Wall-to-Wall Coverage. R. Soc. Open Sci. 2021, 8, 211166. [Google Scholar] [CrossRef] [PubMed]
- Antuña-Marrero, J.-C.; Mann, G.W.; Barnes, J.; Rodríguez-Vega, A.; Shallcross, S.; Dhomse, S.S.; Fiocco, G.; Grams, G.W. Recovery of the First Ever Multi-Year Lidar Dataset of the Stratospheric Aerosol Layer, from Lexington, MA, and Fairbanks, AK, January 1964 to July 1965. Earth Syst. Sci. Data 2021, 13, 4407–4423. [Google Scholar] [CrossRef]
- Winker, D.M. LITE: Results, Performance Characteristics, and Data Archive. In Laser Radar Ranging and Atmospheric Lidar Techniques; Schreiber, U., Werner, C., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, DC, USA, 1997; Volume 3218, pp. 186–193. [Google Scholar] [CrossRef]
- Abshire, J.; Sun, X.; Riris, H.; Sirota, J.; McGarry, J.; Palm, S.; Yi, D.; Liiva, P. Geoscience Laser Altimeter System (GLAS) on the ICESat Mission: On-Orbit Measurement Performance. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Garvin, J.B.; Bufton, J.L. Lunar Observer Laser Altimeter Observations for Lunar Base Site Selection. In Proceedings of the Second Conference on Lunar Bases and Space Activities of the 21st Century, Houston, TX, USA, 5–7 April 1992; Volume 1, pp. 209–217. Available online: https://ntrs.nasa.gov/citations/19930008248 (accessed on 22 February 2025).
- Sun, X. Space-Based Lidar Systems. In Proceedings of the 2nd Conference of Laser and Electro-Optics (CLEO), San Jose, CA, USA, 6 May 2012; Institute of Electrical and Electronics Engineers: Piscataway, NJ, USA, 2012. Available online: https://ntrs.nasa.gov/citations/20120012916 (accessed on 22 February 2025).
- Diaz, J.C.F.; Carter, W.E.; Shrestha, R.L.; Glennie, C.L. LiDAR Remote Sensing. In Handbook of Satellite Applications; Pelton, J.N., Madry, S., Camacho-Lara, S., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 929–980. [Google Scholar] [CrossRef]
- Fahey, T.; Islam, M.; Gardi, A.; Sabatini, R. Laser Beam Atmospheric Propagation Modelling for Aerospace LIDAR Applications. Atmosphere 2021, 12, 918. [Google Scholar] [CrossRef]
- Fouladinejad, F.; Matkan, A.; Hajeb, M.; Brakhasi, F. History and Applications of Space-Borne LIDARs. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-4/W18, 407–414. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Bhardwaj, A.; Martín-Torres, F.J. LiDAR remote sensing of the cryosphere: Present applications and future prospects. Remote Sens. Environ. 2016, 177, 125–143. [Google Scholar] [CrossRef]
- Cheng, L.; Xie, C.; Zhao, M.; Li, L.; Yang, H.; Fang, Z.; Chen, J.; Liu, D.; Wang, Y. Design of Lidar Data Acquisition and Control System in High Repetition Rate and Photon-Counting Mode: Providing Testing for Space-Borne Lidar. Sensors 2022, 22, 3706. [Google Scholar] [CrossRef]
- Newport Corporation. Light Detection and Ranging (LiDAR) System Design. Available online: https://www.newport.com/n/lidar (accessed on 23 February 2025).
- Hansen, J.N.; Hancock, S.; Prade, L.; Bonner, G.M.; Chen, H.; Davenport, I.; Jones, B.E.; Purslow, M. Assessing Novel Lidar Modalities for Maximizing Coverage of a Spaceborne System through the Use of Diode Lasers. Remote Sens. 2022, 14, 2426. [Google Scholar] [CrossRef]
- Kerfoot, W.C.; Hobmeier, M.; Regis, R.; Raman, V.; Brooks, C.; Shuchman, R.; Sayers, M.; Yousef, F.; Reif, M. Lidar (Light Detection and Ranging) and Benthic Invertebrate Investigations: Migrating Tailings Threaten Buffalo Reef in Lake Superior. J. Great Lakes Res. 2019, 45, 872–887. [Google Scholar] [CrossRef]
- Liu, H.F.; Gao, G.H.; Wu, D.C.; Xu, G.D.; Shi, L.S.; Xu, J.M.; Wang, H.B. Ocular Injuries from Accidental Laser Exposure. Health Phys. 1989, 56, 711–716. [Google Scholar] [CrossRef] [PubMed]
- University of British Columbia (UBC). Lidar and Remote Sensing. 2025. Available online: https://ibis.geog.ubc.ca/g2field/subjects/climatology/lidar2.html (accessed on 7 March 2025).
- Baroni, T.; Pandey, P.; Preissler, J.; Gimmestad, G.; O’Dowd, C. Comparison of Backscatter Coefficient at 1064 nm from CALIPSO and Ground-Based Ceilometers over Coastal and Non-Coastal Regions. Atmosphere 2020, 11, 1190. [Google Scholar] [CrossRef]
- Potter, K.S.; Simmons, J.H. Optical Properties of Insulators—Fundamentals. In Optical Materials, 2nd ed.; Potter, K.S., Simmons, J.H., Eds.; Elsevier: Amsterdam, The Netherlands, 2021; pp. 101–171. [Google Scholar] [CrossRef]
- Paschotta, R. Q Switching. In RP Photonics Encyclopedia; RP Photonics AG: Frauenfeld, Switzerland, 2006; Available online: https://www.rp-photonics.com/q_switching.html (accessed on 14 March 2024).
- Feofilov, A.G.; Chepfer, H.; Noël, V.; Szczap, F. Incorporating EarthCARE Observations into a Multi-Lidar Cloud Climate Record: The ATLID (Atmospheric Lidar) Cloud Climate Product. Atmos. Meas. Tech. 2023, 16, 3363–3390. [Google Scholar] [CrossRef]
- Paschotta, R. Optical Pumping. In RP Photonics Encyclopedia; RP Photonics AG: Frauenfeld, Switzerland, 2008; Available online: https://www.rp-photonics.com/optical_pumping.html (accessed on 14 March 2024).
- Yu, A.W. Novel Laser Sources for Space-Based LIDAR and Communications Applications. NASA Tech. Rep. 2022. Available online: https://ntrs.nasa.gov/api/citations/20220002628/downloads/Yu_ALPS%201-page%20summary%20%2815FEB2022%29.pdf (accessed on 22 February 2025).
- Singh, N.; Lorenzen, J.; Sinobad, M.; Wang, K.; Liapis, A.C.; Frankis, H.C.; Haugg, S.; Francis, H.; Carreira, J.; Geiselmann, M.; et al. Silicon Photonics-Based High-Energy Passively Q-Switched Laser. Nat. Photonics 2024, 18, 123–130. Available online: https://www.nature.com/articles/s41566-024-01388-0.pdf (accessed on 22 February 2025). [CrossRef]
- Liu, Q.; Cui, X.; Jamet, C.; Zhu, X.; Mao, Z.; Chen, P.; Bai, J.; Liu, D. A Semianalytic Monte Carlo Simulator for Spaceborne Oceanic Lidar: Framework and Preliminary Results. Remote Sens. 2020, 12, 2820. [Google Scholar] [CrossRef]
- Caron, J.; Durand, Y. Operating Wavelengths Optimization for a Spaceborne Lidar Measuring Atmospheric CO2. Appl. Opt. 2009, 48, 5413–5422. [Google Scholar] [CrossRef]
- Ji, J.; Xie, C.; Xing, K.; Wang, B.; Chen, J.; Cheng, L.; Deng, X. Simulation of Compact Spaceborne Lidar with High-Repetition-Rate Laser. Remote Sens. 2024, 15, 3046. [Google Scholar] [CrossRef]
- Japan Aerospace Exploration Agency (JAXA). Cloud Profiling Radar (CPR) on EarthCARE. 2025. Available online: https://www.eorc.jaxa.jp/EARTHCARE/about/inst_cpr_e.html (accessed on 7 March 2025).
- Mandl, L.; Stritih, A.; Seidl, R.; Ginzler, C.; Senf, C. Spaceborne LiDAR for Characterizing Forest Structure Across Scales in the European Alps. Remote Sens. Ecol. Conserv. 2023, 9, 599–614. [Google Scholar] [CrossRef]
- Magruder, L.; Neumann, T.; Kurtz, N. ICESat-2 Early Mission Synopsis and Observatory Performance. Earth Space Sci. 2021, 8, e2020EA001555. [Google Scholar] [CrossRef]
- Kumar, A.; Paul, S. Spaceborne LIDAR and Future Trends. Indian Soc. Remote Sens. 2012. Available online: https://www.researchgate.net/profile/Ashok-Kumar-190/publication/281859370_Space_borne_LIDAR_and_future_trends/links/55fbef7308ae07629e07c888/Space-borne-LIDAR-and-future-trends.pdf (accessed on 26 March 2025).
- Sun, X. Review of Photodetectors for Space Lidars. Sensors 2024, 24, 6620. [Google Scholar] [CrossRef] [PubMed]
- Cao, B.; Wang, J.; Lu, X.; Wei, Y.; Liu, Z. Spaceborne Laser Altimetry Data Processing and Application. In Applications of Point Cloud Technology; Şahin, C., Ed.; IntechOpen: Rijeka, Croatia, 2024; Chapter 5. [Google Scholar] [CrossRef]
- Sun, X.; Davidson, F.M. Avalanche Photodiode Photon Counting Receivers for Space-Borne Lidars; Technical Report; Johns Hopkins University, Electrical & Computer Engineering: Baltimore, MD, USA; National Aeronautics and Space Administration: Washington, DC, USA, 1991. Available online: https://nla.gov.au/nla.cat-vn4052206 (accessed on 17 March 2024).
- Winker, D.; Hunt, W.; Hostetler, C. Status and Performance of the CALIOP Lidar. Proc. SPIE Int. Soc. Opt. Eng. 2004, 11207, 112072Q. [Google Scholar] [CrossRef]
- Chan, S.; Halimi, A.; Zhu, F.; Gyongy, I.; Henderson, R.; Bowman, R.; McLaughlin, S.; Buller, G.; Leach, J. Long-Range Depth Imaging Using a Single-Photon Detector Array and Non-Local Data Fusion. Sci. Rep. 2019, 9, 8075. [Google Scholar] [CrossRef] [PubMed]
- Barton-Grimley, R.A.; Thayer, J.P.; Hayman, M. Nonlinear Target Count Rate Estimation in Single-Photon Lidar Due to First Photon Bias. Opt. Lett. 2019, 44, 1249–1252. [Google Scholar] [CrossRef]
- Zhang, J.; Li, X.; Tao, Y.; Wang, A.; Wang, L.; Wang, L. Research on the Effect of Receiver Dead Time of the Performance Photon Counting Lidar. Proc. SPIE 2020, 11455, 114554V. Available online: https://www.spiedigitallibrary.org/conference-proceedings-of-spie/11455/2564990/Research-on-the-effect-of-receiver-dead-time-of-the/10.1117/12.2564990.full (accessed on 22 February 2024).
- Blaj, G. Dead-Time Correction for Spectroscopic Photon-Counting Pixel Detectors. J. Synchrotron Radiat. 2019, 26, 1234–1245. Available online: https://journals.iucr.org/s/issues/2019/05/00/pp5145/pp5145.pdf (accessed on 22 February 2024). [CrossRef]
- Zhang, X.; Hayward, J.P.; Laubach, M.A. New Method to Remove the Electronic Noise for Absolutely Calibrating Low Gain Photomultiplier Tubes with a Higher Precision. Nucl. Instrum. Methods Phys. Res. A 2014, 755, 32–37. [Google Scholar] [CrossRef]
- Villa, F.; Severini, F.; Madonini, F.; Zappa, F. SPADs and SiPMs Arrays for Long-Range High-Speed Light Detection and Ranging (LiDAR). Sensors 2021, 21, 3839. [Google Scholar] [CrossRef]
- Hamamatsu. What Is an SiPM and How Does It Work? 2025. Available online: https://hub.hamamatsu.com/us/en/technical-notes/mppc-sipms/what-is-an-SiPM-and-how-does-it-work.html (accessed on 7 March 2025).
- Ripa, J.; Dafcikova, M.; Kosik, P.; Munz, F.; Ohno, M.; Galgoczi, G.; Werner, N.; Pal, A.; Meszaros, L.; Csak, B.; et al. Characterization of More than Three Years of In-Orbit Radiation Damage of SiPMs on GRBAlpha and VZLUSAT-2 CubeSats. arXiv 2024. Available online: https://arxiv.org/abs/2411.00607 (accessed on 22 February 2025).
- Schutz, B.; Zwally, H.; Shuman, C.A.; Hancock, D. Overview of the ICESat Mission. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Yang, G.; Martino, A.J.; Lu, W.; Cavanaugh, J.; Bock, M.; Krainak, M.A. IceSat-2 ATLAS Photon-Counting Receiver: Initial On-Orbit Performance. In Advanced Photon Counting Techniques XIII; Itzler, M.A., Bienfang, J.C., McIntosh, K.A., Eds.; SPIE: Bellingham, DC, USA, 2019; Volume 10978, p. 109780B. [Google Scholar] [CrossRef]
- Izhnin, I.; Lozovoy, K.; Kokhanenko, A.; Khomyakova, K.; Douhan, R.; Dirko, V.; Voitsekhovskii, A.; Fitsych, O.; Akimenko, N. Single-Photon Avalanche Diode Detectors Based on Group IV Materials. Appl. Nanosci. 2021, 12, 253–263. [Google Scholar] [CrossRef]
- RP Photonics. Photon Counting. 2025. Available online: https://www.rp-photonics.com/photon_counting.html (accessed on 7 March 2025).
- Lowe, C.J.; McGrath, C.N.; Hancock, S.; Davenport, I.; Todd, S.; Hansen, J.; Woodhouse, I.; Norrie, C.; Macdonald, M. Spacecraft and Optics Design Considerations for a Spaceborne Lidar Mission with Spatially Continuous Global Coverage. Acta Astronaut. 2024, 214, 809–816. [Google Scholar] [CrossRef]
- Tao, Z.; McCormick, M.P.; Wu, D. A Comparison Method for Spaceborne and Ground-Based Lidar and Its Application to the CALIPSO Lidar. Appl. Phys. B 2008, 91, 639–644. [Google Scholar] [CrossRef]
- Leibniz Institute for Tropospheric Research (TROPOS). Lidar. Available online: https://www.tropos.de/en/research/projects-infrastructures-technology/technology-at-tropos/remote-sensing/lidar (accessed on 23 February 2025).
- Yong, F.; Li, Z.; Hui, G.; Bincai, C.; Li, G.; Haiyan, H. Spaceborne LiDAR Surveying and Mapping. In GIS and Spatial Analysis; Rocha, J., Gomes, E., Boavida-Portugal, I., Viana, C.M., Truong-Hong, L., Phan, A.T., Eds.; IntechOpen: Rijeka, Croatia, 2022; Chapter 9. [Google Scholar] [CrossRef]
- Whiteman, D.; Girolamo, P.; Behrendt, A.; Wulfmeyer, V.; Franco, N. Statistical Analysis of Simulated Spaceborne Thermodynamics Lidar Measurements in the Planetary Boundary Layer. Front. Remote Sens. 2022, 3, 810032. [Google Scholar] [CrossRef]
- CEOS. Lidars. In Earth Observation Handbook; Symbios: Yverdon-les-Bains, Switzerland, 2011; Available online: https://eohandbook.com/eohb2011/earth_lidars.html (accessed on 23 February 2025).
- Selmer, P.; Yorks, J.E.; Nowottnick, E.P.; Cresanti, A.; Christian, K.E. A Deep Learning Lidar Denoising Approach for Improving Atmospheric Feature Detection. Remote Sens. 2024, 16, 2735. [Google Scholar] [CrossRef]
- Kheireddine, M.; Brewin, R.J.W.; Ouhssain, M.; Jones, B.H. Particulate Scattering and Backscattering in Relation to the Nature of Particles in the Red Sea. J. Geophys. Res. Ocean. 2021, 126, e2020JC016610. [Google Scholar] [CrossRef]
- University of Twente. Concepts of Lidar Remote Sensing. Available online: https://ltb.itc.utwente.nl/509/concept/89052 (accessed on 9 February 2025).
- Winker, D.; Vaughan, M.; Omar, A.; Hu, Y.; Powell, K.; Liu, Z.; Hunt, W.; Young, S. Overview of the CALIPSO Mission and CALIOP Data Processing Algorithms. J. Atmos. Ocean. Technol. 2009, 26, 2310–2323. [Google Scholar] [CrossRef]
- Castrejón-García, R.; Varela, J.R.; Utrera, O.; Altamirano Robles, L. Design and Development of an Elastic-Scattering Lidar for the Study of the Atmospheric Structure. Rev. Mex. Fis. 2017, 63, 49–54. [Google Scholar]
- Ceolato, R.; Berg, M.J. Aerosol Light Extinction and Backscattering: A Review with a Lidar Perspective. J. Quant. Spectrosc. Radiat. Transf. 2021, 262, 107492. [Google Scholar] [CrossRef]
- Chazette, P.; Pelon, J.; Mégie, G. Determination by Spaceborne Backscatter Lidar of the Structural Parameters of Atmospheric Scattering Layers. Appl. Opt. 2001, 40, 3428–3440. [Google Scholar] [CrossRef]
- RP Photonics. Scattering. 2025. Available online: https://www.rp-photonics.com/scattering.html (accessed on 7 March 2025).
- Cairo, F.; Di Donfrancesco, G.; Adriani, A.; Pulvirenti, L.; Fierli, F. Comparison of Various Linear zation Parameters Measured by Lidar. Appl. Opt. 1999, 38, 4425–4432. [Google Scholar] [CrossRef] [PubMed]
- Carroll, B.; Nehrir, A.; Kooi, S.; Collins, J.; Barton-Grimley, R.; Notari, A.; Harper, D.; Lee, J. Differential Absorption Lidar Measurements of Water Vapor by the High Altitude Lidar Observatory (HALO): Retrieval Framework and Validation. Atmos. Meas. Tech. Discuss. 2021, 15, 605–626. [Google Scholar] [CrossRef]
- Turner, D.D.; Goldsmith, J.E.M.; Ferrare, R.A. Development and Applications of the ARM Raman Lidar. Meteorol. Monogr. 2016, 57, 18.1–18.15. [Google Scholar] [CrossRef]
- Wandinger, U. Raman Lidar. In Lidar—Range-Resolved Optical Remote Sensing of the Atmosphere; Springer Series in Optical Sciences; Weitkamp, C., Ed.; Springer: New York, NY, USA, 2005; pp. 241–271. [Google Scholar]
- LaVision. Mie, Rayleigh, Raman Scattering. Available online: https://www.lavision.de/en/techniques/mie-rayleigh-raman/ (accessed on 28 February 2025).
- Ground, C.R.; Hunt, R.L.; Hunt, G.J. Quantitative Gas Property Measurements by Filtered Rayleigh Scattering: A Review. Meas. Sci. Technol. 2023, 34, 092001. [Google Scholar] [CrossRef]
- Canada Natural Resources. Interactions with the Atmosphere. Available online: https://natural-resources.canada.ca/maps-tools-publications/satellite-imagery-air-photos/remote-sensing-tutorials/introduction/interactions-atmosphere/14635 (accessed on 9 February 2025).
- Hofer, J.; Ansmann, A.; Althausen, D.; Engelmann, R.; Baars, H.; Fomba, K.W.; Wandinger, U.; Abdullaev, S.F.; Makhmudov, A.N. Optical Properties of Central Asian Aerosol Relevant for Spaceborne Lidar Applications and Aerosol Typing at 355 and 532 nm. Atmos. Chem. Phys. 2020, 20, 9265–9280. [Google Scholar] [CrossRef]
- Sato, K.; Okamoto, H.; Ishimoto, H. Modeling the zation of Space-Borne Lidar Signals. Opt. Express 2019, 27, A117–A132. [Google Scholar] [CrossRef]
- Floutsi, A.; Baars, H.; Engelmann, R.; Althausen, D.; Ansmann, A.; Bohlmann, S.; Heese, B.; Hofer, J.; Kanitz, T.; Haarig, M.; et al. DeLiAn—A Growing Collection of zation Ratio, Lidar Ratio and Ångström Exponent for Different Aerosol Types and Mixtures from Ground-Based Lidar Observations. Atmos. Meas. Tech. Discuss. 2022, 16, 2353–2379. [Google Scholar] [CrossRef]
- Goldsmith, J. High Spectral Resolution Lidar (HSRL) Instrument Handbook; Technical Report; ARM Climate Research Facility, Pacific Northwest National Laboratory: Richland, WA, USA, 2016. Available online: https://www.osti.gov/biblio/1251392 (accessed on 23 February 2025).
- NASA Langley Research Center. Lidar Research at NASA Langley. Available online: https://science.larc.nasa.gov/lidar/ (accessed on 23 February 2025).
- NASA. High Spectral Resolution Lidar (HSRL). Available online: https://esdpubs.nasa.gov/instrument/High_Spectral_Resolution_Lidar (accessed on 23 February 2025).
- Mead, P.F.; DeYoung, R.J. A Water Vapor Differential Absorption LIDAR Design for Unpiloted Aerial Vehicles. NASA Tech. Memo. 2004. NASA/TM-2004-213507. Available online: https://ntrs.nasa.gov/api/citations/20050019540/downloads/20050019540.pdf (accessed on 23 February 2025).
- Browell, E.V.; Ismail, S.; Grant, W.B. Differential Absorption Lidar (DIAL) Measurements from Air and Space. Appl. Phys. B 1998, 67, 399–410. [Google Scholar] [CrossRef]
- Mei, L.; Zhao, G.; Svanberg, S. Differential Absorption Lidar System Employed for Background Atomic Mercury Vertical Profiling in South China. Opt. Lasers Eng. 2014, 55, 128–135. [Google Scholar] [CrossRef]
- Refaat, T.F.; Luck, W.S., Jr.; DeYoung, R.J. Design of Advanced Atmospheric Water Vapor Differential Absorption Lidar (DIAL) Detection System. NASA Tech. Publ. 1999, NASA/TP-1999-209348. Available online: https://ntrs.nasa.gov/api/citations/19990054111/downloads/19990054111.pdf (accessed on 23 February 2025).
- Shangguan, M.; Qiu, J.; Yuan, J.; Shu, Z.; Zhou, L.; Xia, H. Doppler Wind Lidar From UV to NIR: A Review With Case Study Examples. Front. Remote Sens. 2022, 2, 787111. Available online: https://www.frontiersin.org/articles/10.3389/frsen.2021.787111 (accessed on 2 March 2025). [CrossRef]
- Mizutani, K.; Itabe, T.; Ishii, S.; Sasano, M.; Aoki, T.; Ohno, Y.; Asai, K. Space-Borne Coherent Doppler Lidar. Commun. Res. Lab. Rev. 2002, 48, 45–51. [Google Scholar]
- Singh, U.; Yu, J.; Petros, M.; Chen, S.; Kavaya, M.; Trieu, B.; Bai, Y.; Petzar, P.; Modlin, E.; Koch, G.; et al. Advances in High Energy Solid-State 2-Micron Laser Transmitter Development for Ground and Airborne Wind and CO2 Measurements. Proc. SPIE 2010, 7832, 783202. [Google Scholar] [CrossRef]
- Liu, Z.; Barlow, J.F.; Chan, P.-W.; Fung, J.C.H.; Li, Y.; Ren, C.; Mak, H.W.L.; Ng, E. A Review of Progress and Applications of Pulsed Doppler Wind LiDARs. Remote Sens. 2019, 11, 2522. [Google Scholar] [CrossRef]
- BELA Team. The BepiColombo Laser Altimeter (BELA): Concept and Baseline Design. Planet. Space Sci. 2007, 55, 1398–1413. [Google Scholar] [CrossRef]
- Jiang, H.; Li, Y.; Yan, G.; Li, W.; Li, L.; Yang, F.; Ding, A.; Xie, D.; Mu, X.; Li, J.; et al. Unveiling Anomalies in Terrain Elevation Products from Spaceborne Full-Waveform LiDAR over Forested Areas. Forests 2024, 15, 1821. [Google Scholar] [CrossRef]
- Mallet, C.; Bretar, F. Full-waveform topographic lidar: State-of-the-art. ISPRS J. Photogramm. Remote Sens. 2009, 64, 1–16. Available online: https://www.sciencedirect.com/science/article/pii/S0924271608000993 (accessed on 11 May 2025). [CrossRef]
- Zhang, H.; Wagner, F.; Saathoff, H.; Vogel, H.; Hoshyaripour, G.; Bachmann, V.; Förstner, J.; Leisner, T. Comparison of Scanning LiDAR with Other Remote Sensing Measurements and Transport Model Predictions for a Saharan Dust Case. Remote Sens. 2022, 14, 1693. [Google Scholar] [CrossRef]
- Stoffelen, A.; Marseille, G.J.; Bouttier, F.; Vasiljevic, D.; de Haan, S.; Cardinali, C. ADM-Aeolus Doppler Wind Lidar Observing System Simulation Experiment. Q. J. R. Meteorol. Soc. 2006, 132, 1927–1947. [Google Scholar] [CrossRef]
- Couch, R.H.; Rowland, C.W.; Ellis, K.S.; Blythe, M.P.; Regan, C.R.; Koch, M.R.; Antill, C.W., Jr.; Kitchen, W.L.; Cox, J.W.; DeLorme, J.F.; et al. Lidar In-Space Technology Experiment (LITE): NASA’s First In-Space Lidar System for Atmospheric Research. Opt. Eng. 1991, 30, 88–95. [Google Scholar] [CrossRef]
- eoPortal. WorldView-3 Satellite Mission. 2025. Available online: https://www.eoportal.org/satellite-missions/worldview-3 (accessed on 7 March 2025).
- NASA Earthdata. Earth’s Third Dimension: First GEDI Data Available. 2025. Available online: https://www.earthdata.nasa.gov/news/feature-articles/earth-third-dimension-first-gedi-data-available (accessed on 7 March 2025).
- Dubayah, R.; Blair, J.B.; Goetz, S.; Fatoyinbo, L.; Hansen, M.; Healey, S.; Hofton, M.; Hurtt, G.; Kellner, J.; Luthcke, S.; et al. The Global Ecosystem Dynamics Investigation: High-Resolution Laser Ranging of the Earth’s Forests and Topography. Sci. Remote Sens. 2020, 1, 100002. [Google Scholar] [CrossRef]
- Agrawal, S.; Khairnar, G. A Comparative Assessment of Remote Sensing Imaging Techniques: Optical, SAR and LiDAR. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-5/W3, 1–6. [Google Scholar] [CrossRef]
- Dai, G.; Wu, S.; Long, W.; Liu, J.; Xie, Y.; Sun, K.; Meng, F.; Song, X.; Huang, Z.; Chen, W. Aerosol and cloud data processing and optical property retrieval algorithms for the spaceborne ACDL/DQ-1. Atmos. Meas. Tech. 2024, 17, 1879–1890. [Google Scholar] [CrossRef]
- Zhou, H.; Chen, Y.; Hyyppä, J.; Li, S. An Overview of the Laser Ranging Method of Space Laser Altimeter. Infrared Phys. Technol. 2017, 86, 147–158. [Google Scholar] [CrossRef]
- Kaula, W.M.; Schubert, G.; Lingenfelter, R.E.; Sjogren, W.L.; Wollenhaupt, W.R. Apollo Laser Altimetry and Inferences as to Lunar Structure. In Proceedings of the Apollo Science Conference; 1974. Available online: https://api.semanticscholar.org/CorpusID:129023378 (accessed on 2 March 2025).
- NASA Earth Observatory. Shuttle Radar Topography Mission: A Retrospective. 2025. Available online: https://earthobservatory.nasa.gov/features/ShuttleRetrospective (accessed on 7 March 2025).
- Gunter’s Space Page. ICESat-2 (Ice, Cloud, and land Elevation Satellite-2). 2025. Available online: https://space.skyrocket.de/doc_sdat/icesat-2.htm (accessed on 7 March 2025).
- European Space Agency (ESA). EarthCARE Mission Overview. 2025. Available online: https://earth.esa.int/eogateway/missions/earthcare (accessed on 7 March 2025).
- eoPortal. CALIPSO—Cloud-Aerosol Lidar and Infrared Pathfinder Satellite Observations. 2025. Available online: https://www.eoportal.org/satellite-missions/calipso (accessed on 7 March 2025).
- Spinhirne, J.; Palm, S.; Hart, W.; Hlavka, D.; Welton, E. Cloud and Aerosol Measurements from GLAS: Overview and Initial Results. Geophys. Res. Lett. 2005, 32, L22S03. [Google Scholar] [CrossRef]
- Winker, D.M.; Pelon, J.R.; McCormick, M.P. CALIPSO Mission: Spaceborne Lidar for Observation of Aerosols and Clouds. In Proceedings of the Lidar Remote Sensing for Industry and Environment Monitoring III, Hangzhou, China, 17 October 2002; Singh, U.N., Itabe, T., Liu, Z., Eds.; SPIE: Bellingham, WA, USA, 2003; Volume 4893, pp. 1–11. [Google Scholar] [CrossRef]
- NASA. CALIPSO Mission Overview. Available online: https://science.nasa.gov/mission/calipso/ (accessed on 27 February 2025).
- Winker, D.; Tackett, J.; Getzewich, B.; Liu, Z.; Vaughan, M.; Rogers, R. The Global 3-D Distribution of Tropospheric Aerosols as Characterized by CALIOP. Atmos. Chem. Phys. 2013, 13, 3345–3361. [Google Scholar] [CrossRef]
- McGill, M.; Yorks, J.; Scott, V.; Kupchock, A.; Selmer, P. The Cloud-Aerosol Transport System (CATS): A Technology Demonstration on the International Space Station; SPIE: Bellingham, DC, USA, 2015; p. 96120A. [Google Scholar] [CrossRef]
- NASA. Cloud-Aerosol Transport System (CATS). 2015. Available online: https://science.gsfc.nasa.gov/earth/projects/391 (accessed on 2 March 2025).
- European Space Agency. Aeolus Performance Specifications. 2025. Available online: https://www.eoportal.org/satellite-missions/aeolus#performance-specifications (accessed on 2 March 2025).
- Witschas, B.; Lemmerz, C.; Geiß, A.; Lux, O.; Marksteiner, U.; Rahm, S.; Reitebuch, O.; Weiler, F. First Validation of Aeolus Wind Observations by Airborne Doppler Wind Lidar Measurements. Atmos. Meas. Tech. 2020, 13, 2381–2396. Available online: https://amt.copernicus.org/articles/13/2381/2020/ (accessed on 2 March 2025). [CrossRef]
- Neumann, T.A.; Martino, A.J.; Markus, T.; Bae, S.; Bock, M.R.; Brenner, A.C.; Brunt, K.M.; Cavanaugh, J.; Fernandes, S.T.; Hancock, D.W.; et al. The Ice, Cloud, and Land Elevation Satellite—2 Mission: A Global Geolocated Photon Product Derived from the Advanced Topographic Laser Altimeter System. Remote Sens. Environ. 2019, 233, 111325. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, Y.; Stachlewska, I.S.; Hu, Y.; Lu, X.; Chen, W.; Liu, J.; Sun, W.; Yang, S.; Tao, Y.; et al. Spaceborne High-Spectral-Resolution Lidar ACDL/DQ-1 Measurements of the Particulate Backscatter Coefficient in the Global Ocean. Remote Sens. Environ. 2024, 315, 114444. [Google Scholar] [CrossRef]
- eoPortal. TECIS (Terrestrial Ecosystem Carbon Inventory Satellite)/Goumang. 2024. Available online: https://www.eoportal.org/satellite-missions/tecis-goumang#lidar (accessed on 2 March 2025).
- do Carmo, J.P.; de Villele, G.; Wallace, K.; Lefebvre, A.; Ghose, K.; Kanitz, T.; Chassat, F.; Corselle, B.; Belhadj, T.; Bravetti, P. ATmospheric LIDar (ATLID): Pre-Launch Testing and Calibration of the European Space Agency Instrument That Will Measure Aerosols and Thin Clouds in the Atmosphere. Atmosphere 2021, 12, 76. [Google Scholar] [CrossRef]
- European Space Agency. EarthCARE Mission Overview. Available online: https://www.eoportal.org/satellite-missions/earthcare#eop-quick-facts-section (accessed on 2 March 2025).
- Kwok, R.; Cunningham, G.F.; Wensnahan, M.; Rigor, I.; Zwally, H.J.; Yi, D. Thinning and Volume Loss of the Arctic Ocean Sea Ice Cover: 2003–2008. J. Geophys. Res. Ocean. 2009, 114, C7. [Google Scholar] [CrossRef]
- Webb, C.E.; Zwally, H.J.; Abdalati, W. The Ice, Cloud, and Land Elevation Satellite (ICESat) Summary Mission Timeline and Performance Relative to Pre-Launch Mission Success Criteria; NASA: Washington, DC, USA, 2012. Available online: https://api.semanticscholar.org/CorpusID:106488955 (accessed on 1 March 2025).
- Winker, D.M.; Hunt, W.H.; McGill, M.J. Initial Performance Assessment of CALIOP. Geophys. Res. Lett. 2007, 34, L19803. [Google Scholar] [CrossRef]
- Winker, D.; Vaughan, M.; Hunt, B. The CALIPSO Mission and Initial Results from CALIOP. Proc. SPIE 2006, 7, 640902. [Google Scholar] [CrossRef]
- Pauly, R.M.; Yorks, J.E.; Hlavka, D.L.; McGill, M.J.; Amiridis, V.; Palm, S.P.; Rodier, S.D.; Vaughan, M.A.; Selmer, P.A.; Kupchock, A.W.; et al. Cloud-Aerosol Transport System (CATS) 1064 nm Calibration and Validation. Atmos. Meas. Tech. 2019, 12, 6241–6258. [Google Scholar] [CrossRef]
- Yorks, J.; McGill, M.; Palm, S.; Hlavka, D.; Selmer, P.; Nowottnick, E.; Vaughan, M.; Rodier, S.; Hart, W. An Overview of the CATS Level 1 Processing Algorithms and Data Products: CATS Data Products and Algorithms. Geophys. Res. Lett. 2016, 43. [Google Scholar] [CrossRef]
- ESA Earth Online - European Space Agency. ALADIN—Aeolus Laser Doppler Wind Lidar. 2023. Available online: https://earth.esa.int/eogateway/instruments/aladin/description (accessed on 31 May 2025).
- GEDI. Return of the GEDI: Space Station Instrument Returns to Forest Monitoring. 2025. Available online: https://gedi.umd.edu/return-of-the-gedi-space-station-instrument-returns-to-forest-monitoring/ (accessed on 20 March 2025).
- GEDI. Instrument Specifications. 2025. Available online: https://gedi.umd.edu/instrument/specifications/ (accessed on 11 May 2025).
- Zhang, F.; Wang, X.; Wang, L.; Mo, F.; Zhao, L.; Yang, X.; Lv, X.; Xie, J. A Satellite Full-Waveform Laser Decomposition Method for Forested Areas Based on Hidden Peak Detection and Adaptive Genetic Optimization. Remote Sensing 2025, 17, 701. [Google Scholar] [CrossRef]
- EarthCARE. Mission Capabilities. 2025. Available online: https://www.eoportal.org/satellite-missions/earthcare#mission-capabilities (accessed on 11 May 2025).
- Hélière, A.; Gelsthorpe, R.; Le Hors, L.; Toulemont, Y. ATLID, the atmospheric lidar on board the Earthcare Satellite. In International Conference on Space Optics—ICSO 2012; Cugny, B., Armandillo, E., Karafolas, N., Eds.; International Society for Optics and Photonics (SPIE): Bellingham, DC, USA, 2017; Volume 10564, p. 105642D. [Google Scholar] [CrossRef]
- ATLID. Instrument Overview. 2025. Available online: https://earth.esa.int/eogateway/instruments/atlid (accessed on 11 May 2025).
- McCormick, M.P.; Ansmann, A.; Neuber, R.; Rairoux, P.; Wandinger, U. The Flight of the Lidar In-Space Technology Experiment (LITE). In Advances in Atmospheric Remote Sensing with Lidar; Ansmann, A., Neuber, R., Rairoux, P., Wandinger, U., Eds.; Springer: Berlin/Heidelberg, Germany, 1997; pp. 141–144. [Google Scholar] [CrossRef]
- Osborn, M.T.; Kent, G.S.; Trepte, C.R. Stratospheric Aerosol Measurements by the Lidar in Space Technology Experiment. J. Geophys. Res. Atmos. 1998, 103, 11447–11453. [Google Scholar] [CrossRef]
- Sun, X.; Abshire, J.B.; McGarry, J.F.; Neumann, G.A.; Smith, J.C.; Cavanaugh, J.F.; Harding, D.J.; Zwally, H.J.; Smith, D.E.; Zuber, M.T. Space Lidar Developed at the NASA Goddard Space Flight Center—The First 20 Years. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1660–1675. [Google Scholar] [CrossRef]
- Duncanson, L.; Kellner, J.R.; Armston, J.; Dubayah, R.; Minor, D.M.; Hancock, S.; Healey, S.P.; Patterson, P.L.; Saarela, S.; Marselis, S.; et al. Aboveground Biomass Density Models for NASA’s Global Ecosystem Dynamics Investigation (GEDI) Lidar Mission. Remote Sens. Environ. 2022, 270, 112845. [Google Scholar] [CrossRef]
- GEDI. Mission Overview. 2025. Available online: https://gedi.umd.edu/mission/mission-overview/ (accessed on 20 March 2025).
- Kanitz, T.; Wernham, D.; Alvarez, E.; Tzeremes, G.; Parrinello, T.; Marshall, J.; Brewster, J.; Lecrenier, O.; Schillinger, M.; Sanctis, V.; et al. Aeolus - ESA’S Wind Lidar Mission, A Brief Status. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Waikoloa, HI, USA, 26 September 2020; pp. 3463–3466. [Google Scholar] [CrossRef]
- ESA. Aeolus Satellite Mission—eoPortal Directory—Satellite Missions. 2023. Available online: https://www.eoportal.org/satellite-missions/aeolus#eop-quick-facts-section (accessed on 5 March 2025).
- Reitebuch, O.; Lemmerz, C.; Nagel, E.; Paffrath, U.; Durand, Y.; Endemann, M.; Fabre, F.; Chaloupy, M. The Airborne Demonstrator for the Direct-Detection Doppler Wind Lidar ALADIN on ADM-Aeolus. Part I: Instrument Design and Comparison to Satellite Instrument. J. Atmos. Ocean. Technol. 2009, 26, 2501–2515. Available online: https://journals.ametsoc.org/view/journals/atot/26/12/2009jtecha1309_1.xml (accessed on 2 March 2025). [CrossRef]
- Li, S.; Jiang, X.; Tao, T. Guidance Summary and Assessment of the Chang’e-3 Powered Descent and Landing. J. Spacecr. Rocket. 2015, 53. [Google Scholar] [CrossRef]
- Xu, W.; Hongxuan, Y.; Jiang, H.; Tong, P.; Kuang, Y.; Li, M.; Shu, R. Navigation Doppler Lidar Sensor for Precision Landing of China’s Chang’E-5 Lunar Lander. Appl. Opt. 2020, 59, 8167–8174. [Google Scholar] [CrossRef] [PubMed]
- Roldán-Henao, N.; Yorks, J.E.; Su, T.; Selmer, P.A.; Li, Z. Statistically Resolved Planetary Boundary Layer Height Diurnal Variability Using Spaceborne Lidar Data. Remote Sens. 2024, 16, 3252. [Google Scholar] [CrossRef]
- Nazaryan, H.; McCormick, M.; Menzel, W. Global Characterization of Cirrus Clouds Using CALIPSO Data. J. Geophys. Res. 2008, 113, D16211. [Google Scholar] [CrossRef]
- Shannon, E.S.; Finley, A.O.; Hayes, D.J.; Noralez, S.N.; Weiskittel, A.R.; Cook, B.D.; Babcock, C. Quantifying and Correcting Geolocation Error in Spaceborne LiDAR Forest Canopy Observations Using High Spatial Accuracy ALS: A Bayesian Model Approach. arXiv 2023, arXiv:2209.11797. [Google Scholar]
- Tang, H.; Stoker, J.; Luthcke, S.; Armston, J.; Lee, K.; Blair, B.; Hofton, M. Evaluating and Mitigating the Impact of Systematic Geolocation Error on Canopy Height Measurement Performance of GEDI. Remote Sens. Environ. 2023, 291, 113571. [Google Scholar] [CrossRef]
- NASA. Global Ecosystem Dynamics Investigation (GEDI) LiDAR. 2025. Available online: https://www.earthdata.nasa.gov/data/instruments/gedi-lidar (accessed on 20 March 2025).
- Ceccherini, G.; Girardello, M.; Beck, P.; Migliavacca, M.; Duveiller, G.; Dubois, G.; Avitabile, V.; Battistella, L.; Barredo, J.; Cescatti, A. Spaceborne LiDAR Reveals the Effectiveness of European Protected Areas in Conserving Forest Height and Vertical Structure. Commun. Earth Environ. 2023, 4, 97. [Google Scholar] [CrossRef]
- Simard, M.; Pinto, N.; Fisher, J.; Baccini, A. Mapping Forest Canopy Height Globally with Spaceborne LiDAR. J. Geophys. Res. Biogeosci. 2011, 116, 4021. [Google Scholar] [CrossRef]
- Kashongwe, H.B.; Roy, D.P.; Skole, D.L. Examination of the Amount of GEDI Data Required to Characterize Central Africa Tropical Forest Aboveground Biomass at REDD+ Project Scale in Mai Ndombe Province. Sci. Remote Sens. 2023, 7, 100091. [Google Scholar] [CrossRef]
- Kacimi, S.; Kwok, R. Arctic Snow Depth, Ice Thickness, and Volume From ICESat-2 and CryoSat-2: 2018–2021. Geophys. Res. Lett. 2022, 49, e2021GL097448. Available online: https://agupubs.onlinelibrary.wiley.com/doi/abs/10.1029/2021GL097448 (accessed on 20 March 2025). [CrossRef]
- Smith, B.; Fricker, H.A.; Gardner, A.S.; Medley, B.; Nilsson, J.; Paolo, F.S.; Holschuh, N.; Adusumilli, S.; Brunt, K.; Csatho, B.; et al. Pervasive Ice Sheet Mass Loss Reflects Competing Ocean and Atmosphere Processes. Science 2020, 368, 1239–1242. Available online: https://www.science.org/doi/abs/10.1126/science.aaz5845 (accessed on 20 March 2025). [CrossRef] [PubMed]
- Jung, J.; Parrish, C.E.; Magruder, L.A.; Herrmann, J.; Yoo, S.; Perry, J.S. ICESat-2 Bathymetry Algorithms: A Review of the Current State-of-the-Art and Future Outlook. ISPRS J. Photogramm. Remote Sens. 2025, 223, 413–439. [Google Scholar] [CrossRef]
- Smith, J.M. New Global ICESat-2 Bathymetric Data Fills Near-Shore Data Voids. NASA Earthdata News, 2 May 2025. Available online: https://www.earthdata.nasa.gov/news/new-global-icesat-2-bathymetric-data-fills-near-shore-data-voids (accessed on 10 May 2025).
- Parrish, C.; Magruder, L.; Perry, J.; Holwill, M.; Swinski, J.P.; Kief, K. Analysis and Accuracy Assessment of a New Global Nearshore ICESat-2 Bathymetric Dataset, ATL24. ESSOAr Preprint 2025. [Google Scholar] [CrossRef]
- Lv, J.; Gao, C.; Qi, C.; Li, S.; Su, D.; Zhang, K.; Yang, F. Arctic supraglacial lake derived bathymetry combining ICESat-2 and spectral stratification of satellite imagery. EGUsphere 2025, 2025, 1–22. Available online: https://egusphere.copernicus.org/preprints/2025/egusphere-2025-364/ (accessed on 10 May 2025).
- MERLIN Mission Support Office. MERLIN Mission Overview. Available online: https://merlin-methane.space/ (accessed on 2 March 2025).
- ESA. MERLIN (Methane Remote Sensing Lidar Mission). eoPortal Satellite Missions. 2012. Available online: https://www.eoportal.org/satellite-missions/merlin (accessed on 2 March 2025).
- Ehret, G.; Bousquet, P.; Pierangelo, C.; Alpers, M.; Millet, B.; Abshire, J.B.; Bovensmann, H.; Burrows, J.P.; Chevallier, F.; Ciais, P.; et al. MERLIN: A French-German Space Lidar Mission Dedicated to Atmospheric Methane. Remote Sens. 2017, 9, 1052. [Google Scholar] [CrossRef]
- Wernham, D.; Heliere, A.; Mason, G.; Straume, A.G. Aeolus-2 Mission Pre-Development Status. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Brussels, Belgium, 11–16 July 2021; pp. 767–770. [Google Scholar] [CrossRef]
- European Space Agency. Aeolus-2 Value of Information. 2022. Available online: https://www.esa.int/ESA_Multimedia/Images/2022/10/Aeolus-2_Value_of_Information (accessed on 2 March 2025).
- World Meteorological Organization (WMO). MOLI Lidar Instrument Overview. 2025. Available online: https://space.oscar.wmo.int/instruments/view/moli_lidar (accessed on 2 March 2025).
- Japan Aerospace Exploration Agency (JAXA). MOLI: Multi-footprint Observation Lidar and Imager. 2025. Available online: https://www.kenkai.jaxa.jp/eng/research/moli/moli-index.html (accessed on 2 March 2025).
- Murooka, J.; Mitsuhashi, R.; Sakaizawa, D.; Imai, T.; Kimura, T.; Asai, K.; Mizutani, K. Development Status of MOLI (Multi-footprint Observation Lidar and Imager). In Sensors, Systems, and Next-Generation Satellites XXIII; Neeck, S.P., Martimort, P., Kimura, T., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, DC, USA, 2019; Volume 11151, p. 1115106. [Google Scholar] [CrossRef]
- Chen, G.; Tang, J.; Zhao, C.; Wu, S.; Yu, F.; Ma, C.; Xu, Y.; Chen, W.; Zhang, Y.; Liu, J.; et al. Concept Design of the “Guanlan” Science Mission: China’s Novel Contribution to Space Oceanography. Front. Mar. Sci. 2019, 6, 194. Available online: https://www.frontiersin.org/journals/marine-science/articles/10.3389/fmars.2019.00194 (accessed on 7 March 2025). [CrossRef]
- Gallego Torromé, R.; Barzanjeh, S. Advances in Quantum Radar and Quantum LiDAR. Prog. Quantum Electron. 2024, 93, 100497. [Google Scholar] [CrossRef]
- Reichert, M.; Di Candia, R.; Win, M.Z.; Sanz, M. Quantum-Enhanced Doppler Lidar. NPJ Quantum Inf. 2022, 8, 147. [Google Scholar] [CrossRef]
- Geo Week News. NUVIEW Unveils Plan to Use Lidar to Map the Entire Earth. Geo Week News, 4 May 2023. Available online: https://www.geoweeknews.com/news/nuview-satellite-lidar-earth-terrain-mapping-constellations-3d (accessed on 7 March 2025).
- Paschalidis, M.; Kolios, S. Design and Analysis of a Small Satellite Design Hosting Lidar Sensor for Data Acquisition Aimed at Environmental Protection. E3S Web Conf. 2024, 585, 08003. [Google Scholar] [CrossRef]
- Storm, M.; Cao, H.; Albert, M.; Engin, D. Cubesat Lidar Concepts for Ranging, Topology, Sample Capture, Surface, and Atmospheric Science. In Proceedings of the 31st Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 5–10 August 2017; Available online: https://digitalcommons.usu.edu/smallsat/2017/all2017/250/ (accessed on 7 March 2025).
- NASA. Clementine Mission Overview. 2025. Available online: https://nssdc.gsfc.nasa.gov/planetary/clementine.html (accessed on 2 March 2025).
- NASA. NEAR Shoemaker Mission Overview. 2025. Available online: https://science.nasa.gov/mission/near-shoemaker/ (accessed on 2 March 2025).
- NSSDC. NEAR Laser Rangefinder (NLR) Experiment Overview. 2025. Available online: https://nssdc.gsfc.nasa.gov/nmc/experiment/display.action?id=1996-062A-03 (accessed on 2 March 2025).
- NASA. Hayabusa Mission Overview. 2025. Available online: https://science.nasa.gov/mission/hayabusa/ (accessed on 2 March 2025).
- NASA. MESSENGER Mission Overview. 2025. Available online: https://science.nasa.gov/mission/messenger/ (accessed on 2 March 2025).
- JAXA. KAGUYA (SELENE) Mission Overview. 2025. Available online: https://www.isas.jaxa.jp/en/missions/spacecraft/past/kaguya.html (accessed on 2 March 2025).
- ESA. Chang’e 1—New Mission to Moon Lifts Off. 2025. Available online: https://www.esa.int/Science_Exploration/Space_Science/SMART-1/Chang_e_1_-_new_mission_to_Moon_lifts_off (accessed on 2 March 2025).
- NASA. Mars Phoenix Mission. 2025. Available online: https://science.nasa.gov/mission/mars-phoenix/ (accessed on 2 March 2025).
- NASA. Chandrayaan-1 Mission. 2025. Available online: https://science.nasa.gov/mission/chandrayaan-1/ (accessed on 2 March 2025).
- NASA. Lunar Reconnaissance Orbiter (LRO) Mission Overview. 2025. Available online: https://science.nasa.gov/mission/lro/about/ (accessed on 2 March 2025).
- NASA. Lunar Reconnaissance Orbiter (LRO) Program Overview. 2025. Available online: https://science.nasa.gov/lunar-science/programs/lunar-reconnaissance-orbiter/ (accessed on 2 March 2025).
- eoPortal. Chang’e-2 Mission Overview. 2025. Available online: https://www.eoportal.org/satellite-missions/chang-e-2#eop-quick-facts-section (accessed on 2 March 2025).
- NASA. Hayabusa-2 Mission Overview. 2025. Available online: https://science.nasa.gov/mission/hayabusa-2/ (accessed on 2 March 2025).
- NASA. OSIRIS-REx Mission Overview. 2025. Available online: https://science.nasa.gov/mission/osiris-rex/ (accessed on 2 March 2025).
- ESA. BepiColombo Mission Overview. 2025. Available online: https://www.esa.int/Science_Exploration/Space_Science/BepiColombo_overview2 (accessed on 2 March 2025).
- Benkhoff, J.; Murakami, G.; Baumjohann, W.; Besse, S.; Bunce, E.; Casale, M.; Cremosese, G.; Glassmeier, K.-H.; Hayakawa, H.; Heyner, D.; et al. BepiColombo - Mission Overview and Science Goals. Space Sci. Rev. 2021, 217, 90. [Google Scholar] [CrossRef]
- NASA. Chandrayaan-2. 2025. Available online: https://science.nasa.gov/mission/chandrayaan-2/ (accessed on 7 March 2025).
- Indian Space Research Organisation (ISRO). Chandrayaan-2. 2025. Available online: https://www.isro.gov.in/Chandrayaan_2.html (accessed on 7 March 2025).
- European Space Agency (ESA). JUICE—JUpiter ICy Moons Explorer. 2025. Available online: https://www.esa.int/Science_Exploration/Space_Science/Juice (accessed on 7 March 2025).


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bolcek, J.; Gibril, M.B.A.; Veverka, J.; Sloboda, Š.; Maršálek, R.; Götthans, T. Spaceborne LiDAR Systems: Evolution, Capabilities, and Challenges. Sensors 2025, 25, 3696. https://doi.org/10.3390/s25123696
Bolcek J, Gibril MBA, Veverka J, Sloboda Š, Maršálek R, Götthans T. Spaceborne LiDAR Systems: Evolution, Capabilities, and Challenges. Sensors. 2025; 25(12):3696. https://doi.org/10.3390/s25123696
Chicago/Turabian StyleBolcek, Jan, Mohamed Barakat A. Gibril, Jiří Veverka, Šimon Sloboda, Roman Maršálek, and Tomáš Götthans. 2025. "Spaceborne LiDAR Systems: Evolution, Capabilities, and Challenges" Sensors 25, no. 12: 3696. https://doi.org/10.3390/s25123696
APA StyleBolcek, J., Gibril, M. B. A., Veverka, J., Sloboda, Š., Maršálek, R., & Götthans, T. (2025). Spaceborne LiDAR Systems: Evolution, Capabilities, and Challenges. Sensors, 25(12), 3696. https://doi.org/10.3390/s25123696