

5G Indoor Positioning Error Correction Based on 5G-PECNN
Abstract
1. Introduction
- (1)
- We analyzed a dataset constructed for indoor scenarios to identify the primary characteristics causing 5G positioning errors in indoor environments.
- (2)
- Addressing non-linear features such as noise and multipath interference prevalent in indoor scenarios affecting 5G positioning errors, we introduced a neural network-based 5G positioning error correction network. The network effectively reduces the positioning error.
- (3)
- In response to the causes of errors in indoor scenarios, we enhanced and optimized neural networks. We proposed a multi-level fusion network structure based on adaptive gradient descent. The network structure effectively prevents falling into local optima in this scenario.
2. Related Work
2.1. Research on 5G NR Positioning Principles
2.2. Neural Network-Based Positioning Error Correction
3. Preliminaries
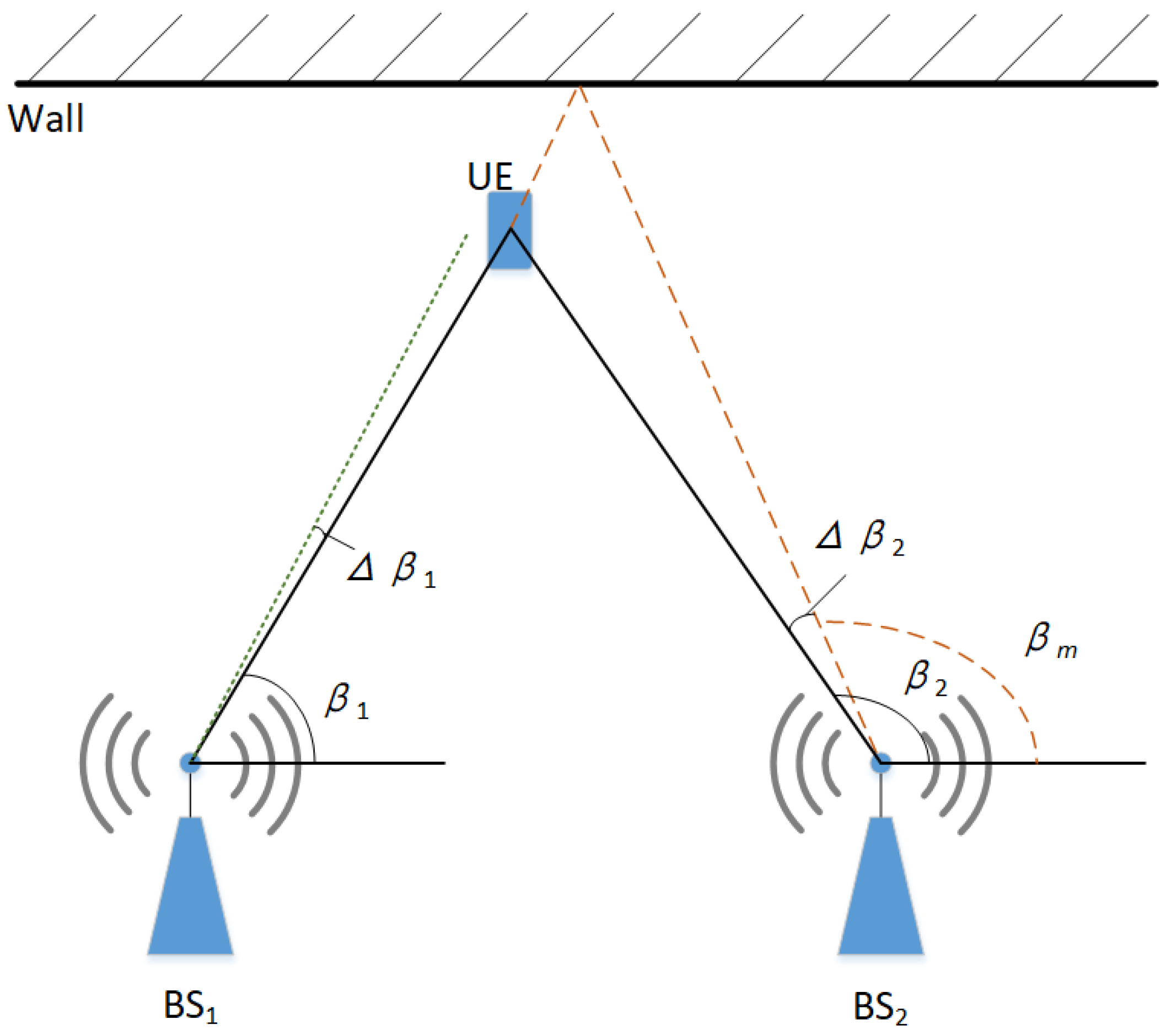
3.1. AOA Localization Principles and Error Models
3.2. 5G Indoor Positioning Dataset
4. Methods
4.1. 5G Positioning Error Correction Neural Network
4.2. Adaptive Global Gradient Descent Algorithm
| Algorithm 1: pseudo code of AGGD | |
| 1 | Tensor , Tensor |
| 2 | Parameters: : Weight Parameters of Neural Network Nodes in the Previous Training Epoch; : Loss Values of the Neural Network for the Previous n Training Epochs. |
| 3 | Operation: The algorithm is based on the Pytorch framework, please refer to Pytorch [47] for related torch operations. |
| 4 | Output: W: Weight Parameters of Neural Network Nodes in this Training Epoch. |
| 5 | def AGGD(self, ,): |
| 6 | # Initialization |
| 7 | W = |
| 8 | optimizer = torch.optim.Adam(model.parameters(), lr = 0.0004) |
| 9 | yPred = model(x) #Predict output using previous generation weights |
| 10 | l = torch.nn.MSE(yPred, yReal) |
| 11 | |
| 12 | L = .append(l) |
| 13 | |
| 14 | # Update network weights |
| 15 | |
| 16 | if flag: |
| 17 | |
| 18 | count = 0 |
| 19 | L = [] |
| 20 | else: |
| 21 | optimizer.zero_grad() |
| 22 | loss.backward() |
| 23 | count += 1 |
| 24 | valid() |
5. Results and Discussion
5.1. Experimental Environment and Dataset Division
5.2. Test Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 5G | 5th-Generation Mobile Communication Technology |
| GPS | Global Positioning System |
| GNSS | Global Navigation Satellite System |
| 5G NR | 5th-generation New Radio |
| TOA | Time of Arrival |
| TDOA | Time Difference of Arrival |
| AOA | Angle of Arrival |
| RSSI | Received Signal Strength Indication |
| CSI | Channel State Information |
| RSRP | Reference Signal Received Power |
| RSRQ | Reference Signal Quality |
| 5G-PECNN | Positioning Error Correction Neural Network for 5G |
| AGGD | Adaptive Global Gradient Descent |
| BP | Backpropagation Neural Network |
| ReLU | Rectified Linear Unit |
| MSE | Mean squared error |
References
- Elsheikh, M.; Iqbal, U.; Noureldin, A.; Korenberg, M. The Implementation of Precise Point Positioning (PPP): A Comprehensive Review. Sensors 2023, 23, 8874. [Google Scholar] [CrossRef]
- Kim Geok, T.; Zar Aung, K.; Sandar Aung, M.; Thu Soe, M.; Abdaziz, A.; Pao Liew, C.; Hossain, F.; Tso, C.P.; Yong, W.H. Review of Indoor Positioning: Radio Wave Technology. Appl. Sci. 2021, 11, 279. [Google Scholar] [CrossRef]
- Liu, F.; Liu, J.; Yin, Y.; Wang, W.; Hu, D.; Chen, P.; Niu, Q. Survey on WiFi-based indoor positioning techniques. IET Commun. 2020, 14, 1372–1383. [Google Scholar] [CrossRef]
- Cao, H.; Wang, Y.; Bi, J.; Zhang, Y.; Yao, G.; Feng, Y.; Si, M. LOS compensation and trusted NLOS recognition assisted WiFi RTT indoor positioning algorithm. Expert Syst. Appl. 2024, 243, 122867. [Google Scholar] [CrossRef]
- Pau, G.; Arena, F.; Gebremariam, Y.E.; You, I. Bluetooth 5.1: An Analysis of Direction Finding Capability for High-Precision Location Services. Sensors 2021, 21, 3589. [Google Scholar] [CrossRef]
- Mahmoud, E.; Petteri, M.; Janne, K.; Petri, V.; Ahm, S.; Timo, M.; Mohammed, E.; Heidi, K. Precision Positioning for Smart Logistics Using Ultra-Wideband Technology-Based Indoor Navigation: A Review. IEEE Access 2022, 10, 44413–44445. [Google Scholar]
- Mogyorósi, F.; Revisnyei, P.; Pašić, A.; Papp, Z.; Törös, I.; Varga, P.; Pašić, A. Positioning in 5G and 6G Networks—A Survey. Sensors 2022, 22, 4757. [Google Scholar] [CrossRef]
- Ruan, Y.; Chen, L.; Zhou, X.; Liu, Z.; Liu, X.; Guo, G.; Chen, R. iPos-5G: Indoor Positioning via Commercial 5G NR CSI. IEEE Internet Things J. 2023, 10, 8718–8733. [Google Scholar] [CrossRef]
- Chen, L.; Zhou, X.; Chen, F.; Yang, L.-L.; Chen, R. Carrier Phase Ranging for Indoor Positioning with 5G NR Signals. IEEE Internet Things J. 2022, 13, 10908–10919. [Google Scholar] [CrossRef]
- Geng, Z.; Yang, J.; Guo, Z.; Cao, H.; Leonidas, L. Research on Fingerprint and Hyperbolic Fusion Positioning Algorithm Based on 5G Technology. Electronics 2022, 11, 2405. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, L.; Zhou, X.; Jiao, Z.; Guo, G.; Chen, R. Machine Learning for Time-of-Arrival Estimation with 5G Signals in Indoor Positioning. IEEE Internet Things J. 2023, 10, 9782–9795. [Google Scholar] [CrossRef]
- Ghazaleh, K.; Ruotsalainen, L. Cooperative Localization Utilizing Reinforcement Learning for 5G Networks. arXiv 2021, arXiv:2108.10222. [Google Scholar]
- Chengming, J.; Ian, B.; Kai, Z.; Wee Peng, T.; Keck Voon, L. 5G Positioning Using Code-Phase Timing Recovery. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–7. [Google Scholar]
- Zheng, Y.; Sheng, M.; Liu, J.; Li, J. Exploiting AoA Estimation Accuracy for Indoor Localization: A Weighted AoA-Based Approach. IEEE Wirel. Commun. Lett. 2019, 8, 65–68. [Google Scholar] [CrossRef]
- Deng, Z.; Wu, J.; Wang, S.; Zhang, M. Indoor Localization with a Single Access Point Based on TDoA and AoA. Wirel. Commun. Mob. Comput. 2022, 2022, 9526532. [Google Scholar] [CrossRef]
- Ruan, Y.; Chen, L.; Zhou, X.; Guo, G.; Chen, R. Hi-Loc: Hybrid Indoor Localization via Enhanced 5G NR CSI. IEEE Trans. Instrum. Meas. 2022, 71, 5502415. [Google Scholar] [CrossRef]
- Qiao, L.; Xuewen, L.; Minmin, L.; Shahrokh, V. Indoor Localization Based on CSI Fingerprint by Siamese Convolution Neural Network. IEEE Trans. Veh. Technol. 2021, 70, 12168–12173. [Google Scholar]
- Celik, G.; Celebi, H. TOA positioning for uplink cooperative NOMA in 5G networks. Phys. Commun. 2019, 36, 100812. [Google Scholar] [CrossRef]
- del Peral-Rosado, J.; Gunnarsson, F.; Dwivedi, S.; Razavi, S.; Renaudin, O.; López-Salcedo, J.; Seco-Granados, G. Exploitation of 3D City Maps for Hybrid 5G RTT and GNSS Positioning Simulations. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Virtual, 4–8 May 2020; pp. 9205–9209. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Huang, X.; Guo, Y. Frequency-Domain AoA Estimation and Beamforming with Wideband Hybrid Arrays. IEEE Trans. Wirel. Commun. 2011, 10, 2543–2553. [Google Scholar] [CrossRef]
- Hu, A.; Lv, T.; Gao, H.; Zhang, Z.; Yang, S. An ESPRIT-Based Approach for 2-D Localization of Incoherently Distributed Sources in Massive MIMO Systems. IEEE J. Sel. Top. Signal Process. 2014, 8, 996–1011. [Google Scholar] [CrossRef]
- Inoue, M.; Hayashi, K.; Hui, G.; Mori, H.; Nabetani, T. A DOA Estimation Method with Kronecker Subspace for Coherent Signals. IEEE Commun. Lett. 2018, 22, 2306–2309. [Google Scholar] [CrossRef]
- Huang, H.; Yang, J.; Huang, H.; Song, Y.; Gui, G. Deep Learning for Super-Resolution Channel Estimation and DOA Estimation Based Massive MIMO System. IEEE Trans. Veh. Technol. 2018, 67, 8549–8560. [Google Scholar] [CrossRef]
- Han, S.; Li, Y.; Meng, W.; He, C. A New High Precise Indoor Localization Approach Using Single Access Point. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–5. [Google Scholar]
- Li, Y.; Zhang, Z.; Wu, L.; Dang, J.; Liu, P. 5G Communication Signal Based Localization with a Single Base Station. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference, Virtual, 18 November–16 December 2020; pp. 1–5. [Google Scholar]
- Wang, W.; Zhang, W. Joint Beam Training and Positioning for Intelligent Reflecting Surfaces Assisted Millimeter Wave Communications. IEEE Trans. Wirel. Commun. 2021, 20, 6282–6297. [Google Scholar] [CrossRef]
- Nagah Amr, M.; ELAttar, H.M.; Abd El Azeem, M.H.; El Badawy, H. An Enhanced Indoor Positioning Technique Based on a Novel Received Signal Strength Indicator Distance Prediction and Correction Model. Sensors 2021, 21, 719. [Google Scholar] [CrossRef]
- Liu, Q.; Bai, X.; Gan, X.; Yang, S. Lora RTT ranging characterization and indoor positioning system. Wirel. Commun. Mob. Comput. 2021, 2021, 5529329. [Google Scholar] [CrossRef]
- Sosnin, S.; Artyom, L.; Alexey, K. DL-AOD Positioning Algorithm for Enhanced 5G NR Location Services. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain, 29 November–2 December 2021. [Google Scholar]
- Han, C.; Xue, S.; Long, L.; Xiao, X. Research on Inertial Navigation and Environmental Correction Indoor Ultra-Wideband Ranging and Positioning Methods. Sensors 2024, 1, 261. [Google Scholar] [CrossRef]
- Long, K.; Nsalo Kong, D.F.; Zhang, K.; Tian, C.; Shen, C. A CSI-based indoor positioning system using single UWB ranging correction. Sensors 2021, 21, 6447. [Google Scholar] [CrossRef]
- Kumar, U.A. Comparison of neural networks and regression analysis: A new insight. Expert Syst. Appl. 2005, 29, 424–430. [Google Scholar] [CrossRef]
- Lian-Suo, W.; Hua, L.; Di, W.; Yuan, G. Clock synchronization error compensation algorithm based on BP neural network model. Acta Phys. Sin. 2021, 70, 114203. [Google Scholar]
- Wang, H.; Hong, M.; Hong, Z. Research on BP Neural Network Recommendation Model Fusing User Reviews and Ratings. IEEE Access 2021, 9, 86728–86738. [Google Scholar]
- Wang, W.; Zhu, Q.; Wang, Z.; Zhao, X.; Yang, Y. Research on Indoor Positioning Algorithm Based on SAGA-BP Neural Network. IEEE Sens. J. 2022, 22, 3736–3744. [Google Scholar] [CrossRef]
- Kanhere, A.; Shubh, G.; Akshay, S.; Grace, G. Improving gnss positioning using neural-network-based corrections. NAVIGATION J. Inst. Navig. 2022, 69, 548. [Google Scholar] [CrossRef]
- Dai, P.; Wang, S.; Xu, T.; Li, M.; Gao, F.; Xing, J.; Yao, L. Efficient Localization Algorithm with UWB Ranging Error Correction Model based Genetic Algorithm-Ant Colony Optimization-Backpropagation Neural Network. IEEE Sens. J. 2023, 23, 29906–29918. [Google Scholar] [CrossRef]
- Cheng, C.; Wang, T.-P.; Huang, Y.-F. Indoor positioning system using artificial neural network with swarm intelligence. IEEE Access 2020, 8, 84248–84257. [Google Scholar] [CrossRef]
- Shang, J.; Ziyang, Y. Study in CSI Correction Localization Algorithm with DenseNet. IEICE Trans. Commun. 2022, 105, 76–84. [Google Scholar] [CrossRef]
- Beale, C.; Lennon, J.; Yearsley, J.; Brewer, M.; Elston, D. Regression analysis of spatial data. Ecol. Lett. 2010, 13, 246–264. [Google Scholar] [CrossRef]
- Hamid, M.; Nitin, K. Optimizing artificial neural network-based indoor positioning system using genetic algorithm. Int. J. Digit. Earth 2013, 6, 158–184. [Google Scholar]
- Chin, W.L.; Hsieh, C.C.; Shiung, D.; Jiang, T. Intelligent Indoor Positioning Based on Artificial Neural Networks. IEEE Netw. 2020, 34, 164–170. [Google Scholar] [CrossRef]
- Mok, E.; Cheung, B.K.S. An Improved Neural Network Training Algorithm for Wi-Fi Fingerprinting Positioning. ISPRS Int. J. Geo-Inf. 2013, 2, 854–868. [Google Scholar] [CrossRef]
- Lu, E.H.-C.; Ciou, J.-M. Integration of Convolutional Neural Network and Error Correction for Indoor Positioning. ISPRS Int. J. Geo-Inf. 2020, 9, 74. [Google Scholar] [CrossRef]
- Xue, Y.; Wang, Y.; Liang, J. A self-adaptive gradient descent search algorithm for fully-connected neural networks. Neurocomputing 2022, 478, 70–80. [Google Scholar] [CrossRef]
- PyTorch Documentation. Available online: https://pytorch.org/docs/1.8.1/ (accessed on 26 March 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| A | B | C | D | E | |
|---|---|---|---|---|---|
| Raw mean error (m) | 2.342 | 1.766 | 1.757 | 0.738 | 0.838 |
| BP Neural Network (m) | 2.101 | 1.763 | 1.434 | 0.930 | 0.839 |
| 5G-PECNN model A (m) | 2.064 | 1.319 | 1.068 | 0.929 | 0.809 |
| 5G-PECNN model B (m) | 1.690 | 1.201 | 0.680 | 0.664 | 0.801 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.; Zhang, Q.; Hu, L.; Ye, H.; Wang, X.; Wang, T.; Liu, S. 5G Indoor Positioning Error Correction Based on 5G-PECNN. Sensors 2024, 24, 1949. https://doi.org/10.3390/s24061949
Yang S, Zhang Q, Hu L, Ye H, Wang X, Wang T, Liu S. 5G Indoor Positioning Error Correction Based on 5G-PECNN. Sensors. 2024; 24(6):1949. https://doi.org/10.3390/s24061949
Chicago/Turabian StyleYang, Shan, Qiyuan Zhang, Longxing Hu, Haina Ye, Xiaobo Wang, Ti Wang, and Syuan Liu. 2024. "5G Indoor Positioning Error Correction Based on 5G-PECNN" Sensors 24, no. 6: 1949. https://doi.org/10.3390/s24061949
APA StyleYang, S., Zhang, Q., Hu, L., Ye, H., Wang, X., Wang, T., & Liu, S. (2024). 5G Indoor Positioning Error Correction Based on 5G-PECNN. Sensors, 24(6), 1949. https://doi.org/10.3390/s24061949