


A Framework for Detecting False Data Injection Attacks in Large-Scale Wireless Sensor Networks


Abstract
1. Introduction
1.1. Motivation
- Stealthy FDIA detection. The attacker’s purpose is to use resourceful and sophisticated strategies to minimize the risk of being identified. Stealthy FDIAs may be employed, i.e., making the injected false data look as close to the genuine data as possible, such as by mimicking genuine data distributions and time series patterns. Since stealthy FDIAs are typically not easily observed, the detection framework should take this into account to reduce the likelihood of potential harm.
- Distribute detection. The detection process might be centralized or distributed. In centralized detection, all sensor data are sent to a central node for thorough processing. In distributed detection, sensor data are evaluated separately by local sensors or edge devices, making it more responsive to data changes than centralized detection. More significantly, given the widely dispersed sensors and enormous data volumes in large-scale WSNs, distributed detection might be more straightforward to scale.
- General detection. Large-scale WSNs are employed in various fields, and the physical behavior of such systems is diverse. Electric power systems, for example, can be defined using circuit equations, whereas thermodynamic systems can be represented using thermodynamic laws. Therefore, a detection framework based only on a measurement that does not require domain-specific a priori knowledge is necessary, which makes the detection method more general and allows for similar detection methods to be applied to sensors in different domains without much adaptation.
1.2. Main Contributions
- We first develop a grouping approach based on the temporal correlation of the cross-correlation between the time-series signals of pairwise sensors. All sensors are categorized into multiple correlated groups, and subsequent detection methods are performed separately within the groups.
- We build an autoregressive integrated moving average (ARIMA) model for predicting future data from each sensor using historical time-series signals, which is used to learn the normal temporal correlation of the cross-correlation between data reported by pairwise sensors.
- Based on the comparison of the normal and actual temporal correlation of the cross-correlation within each group, the basis for determining the consistency of the pairwise sensor data is established. Then, majority voting is executed within each group to identify the abnormal sensors.
- To verify the performance of the detection framework, we construct simple FDIAs and stealthy FDIAs in a genuine sensor dataset. The effectiveness of our proposed detection framework is verified through extensive simulation experiments.
2. Related Work
2.1. FDIA Detection Methods
2.2. FDIA Types
3. Preliminaries
3.1. Sensor Data
3.2. Spatiotemporal Correlation between Sensor Data
3.2.1. Spatial Correlation
3.2.2. Temporal Correlation
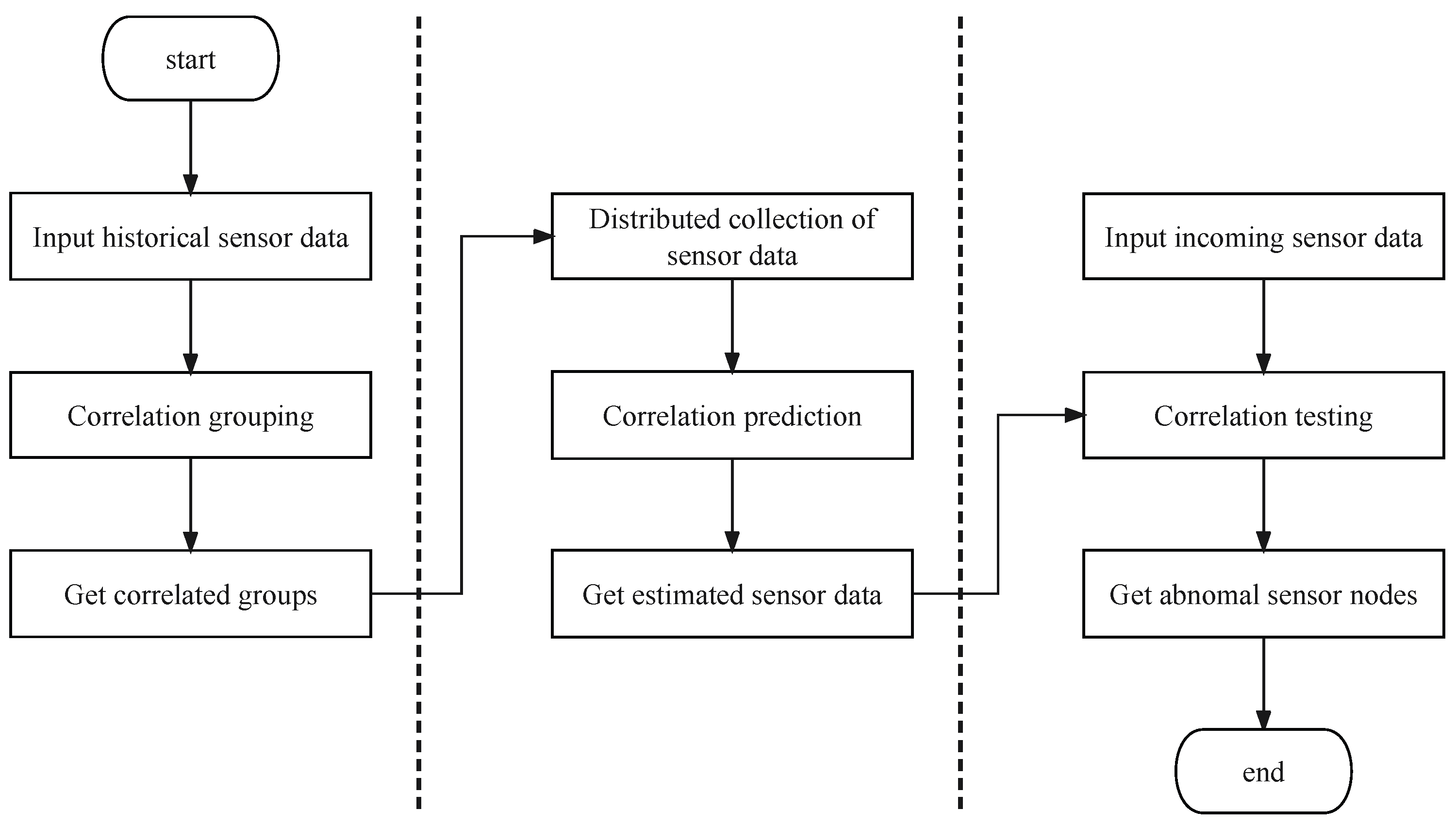
4. FDIA Detection Framework
- Phase I: Correlation grouping. The purpose of this phase is to group V in a large-scale WSN based on historical sensor data so that sensors in the same group are highly correlated with other sensors.
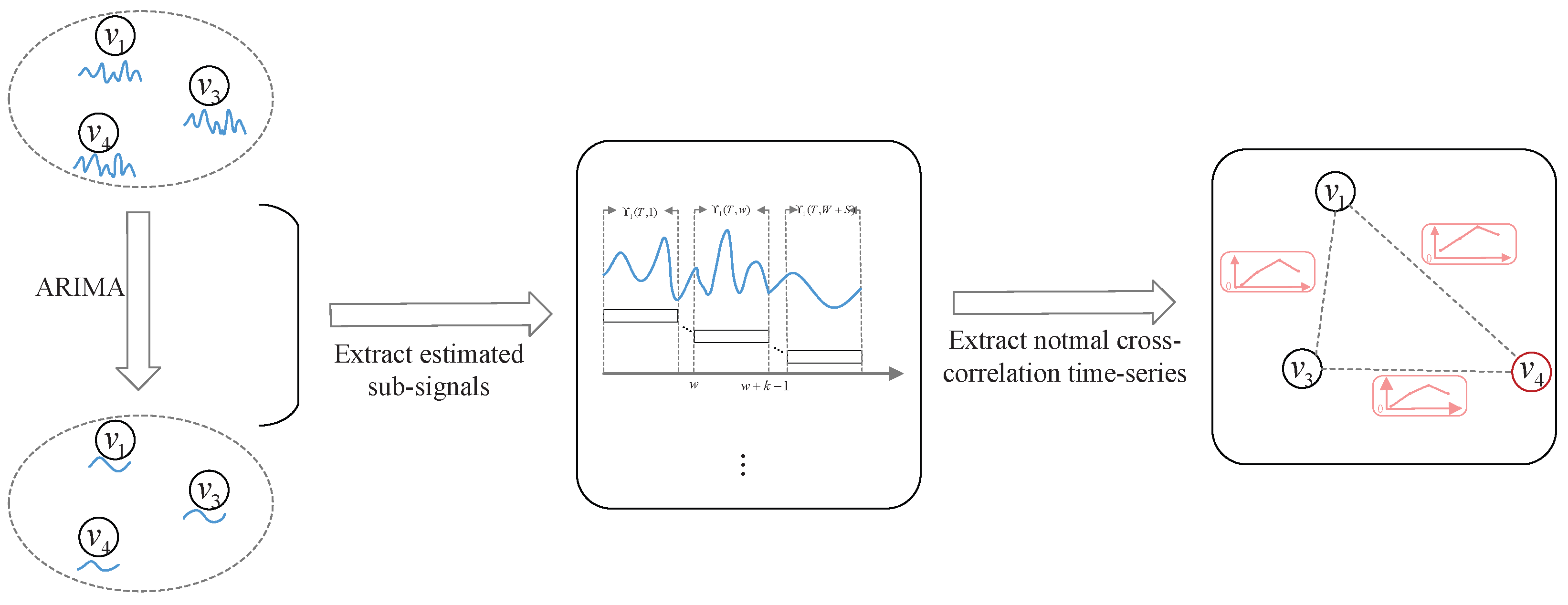
- Phase II: Correlation prediction. The purpose of this phase is to predict the normal temporal correlation of the cross-correlation between pairwise sensor measurements in the same group over a short period of time in the future.
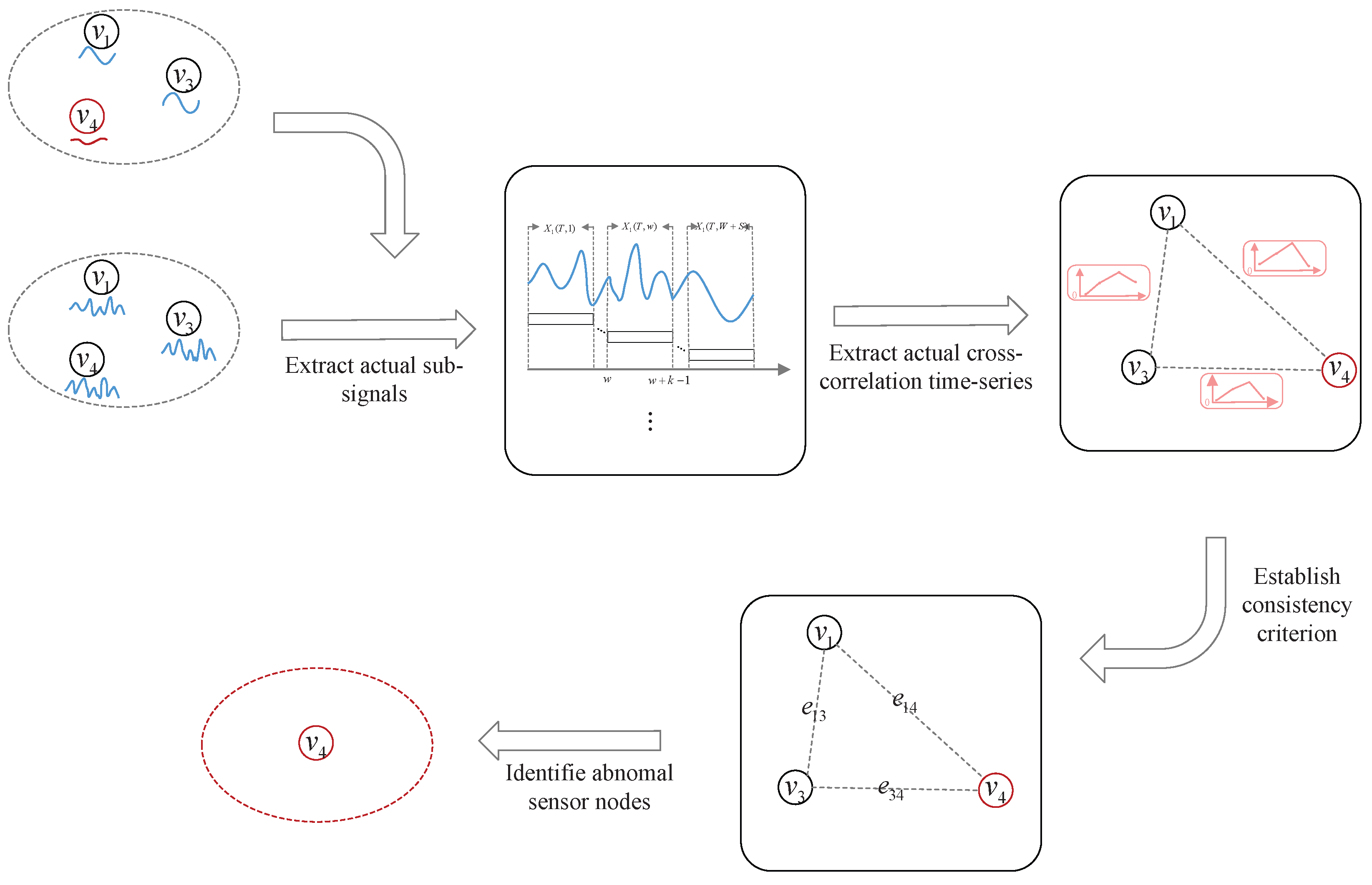
- Phase III: Correlation testing. The purpose of this phase is to test the actual sensor data based on the predicted normal temporal and spatial correlations.
4.1. Correlation Grouping
4.2. Correlation Prediction
4.3. Correlation Testing
5. Effectiveness of the Proposed Framework
5.1. Experiment Preparation
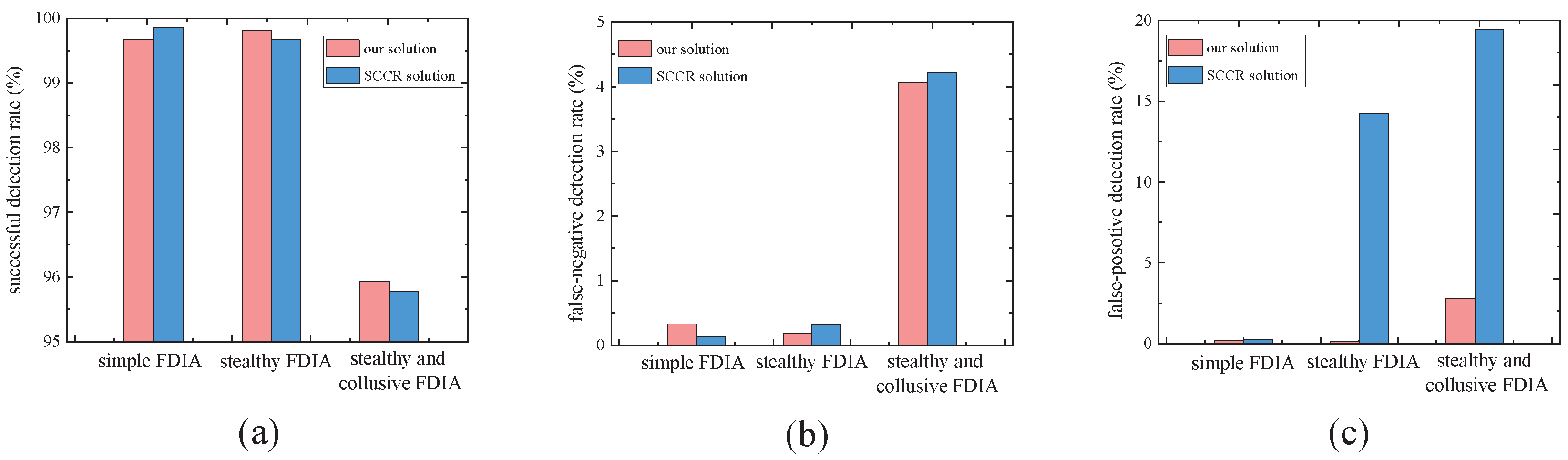
5.2. Experiments and Analysis of Experimental Results
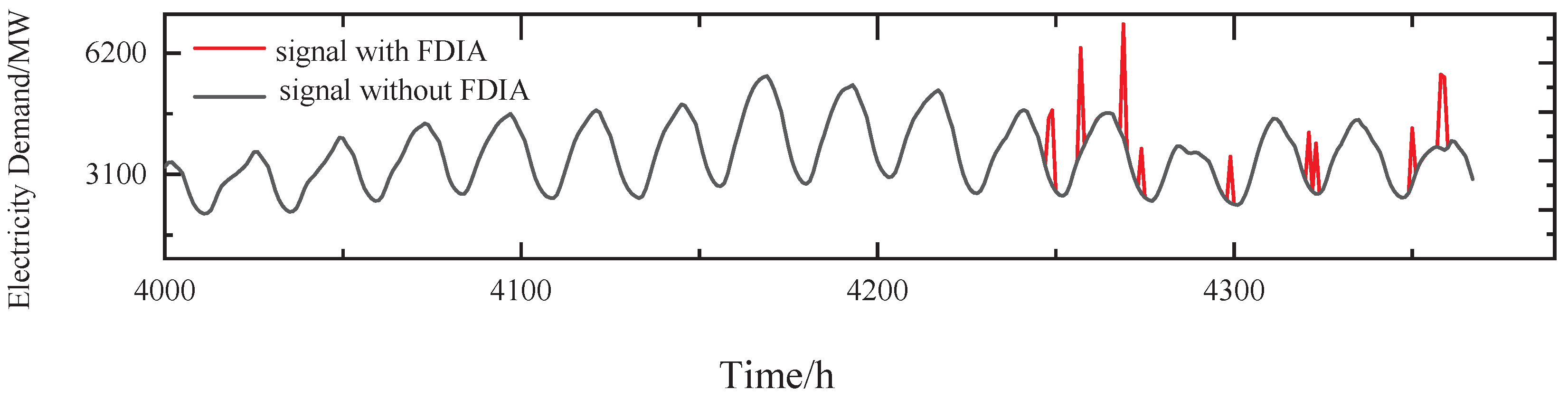
5.2.1. The Simple FDIA
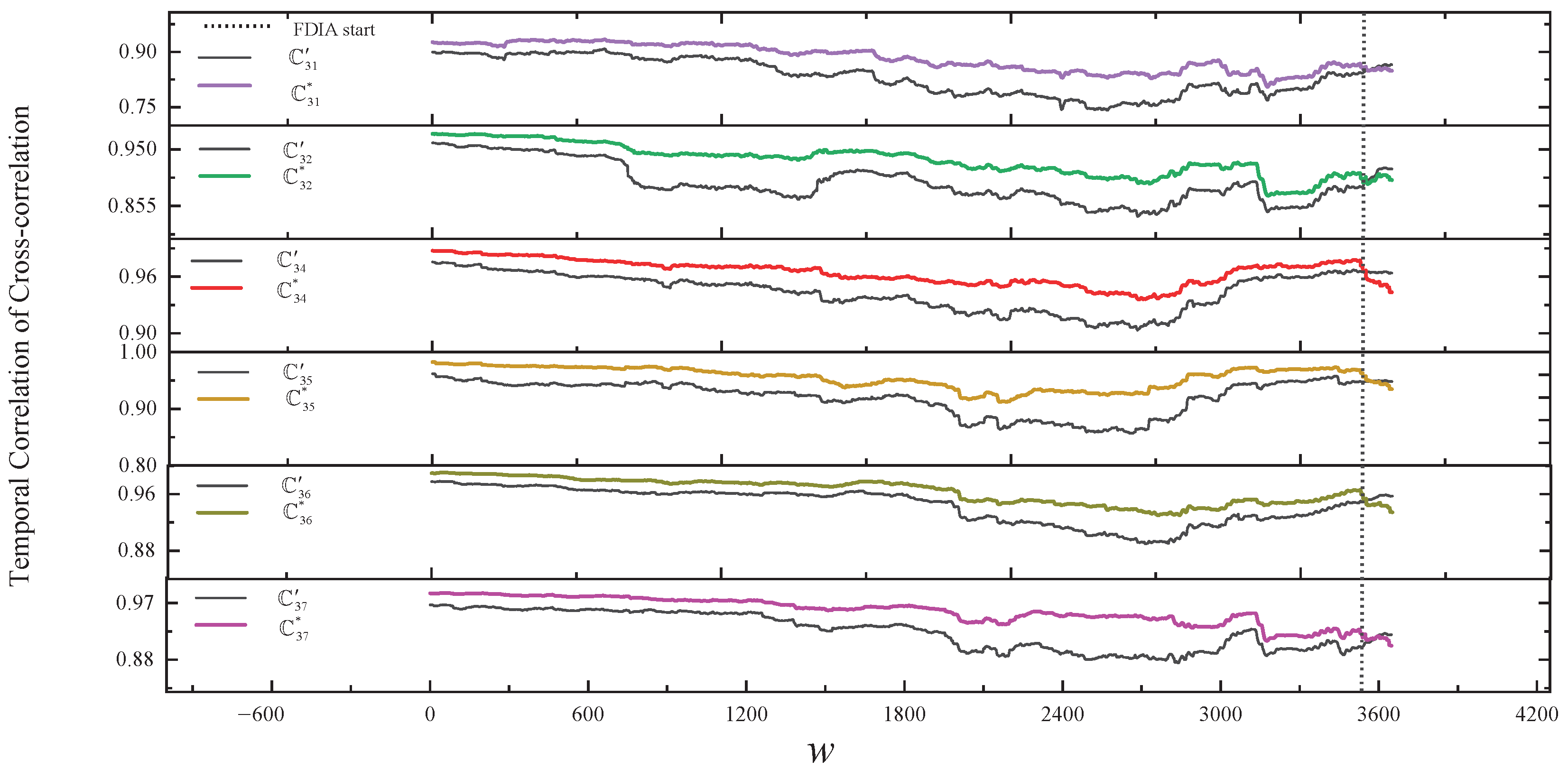
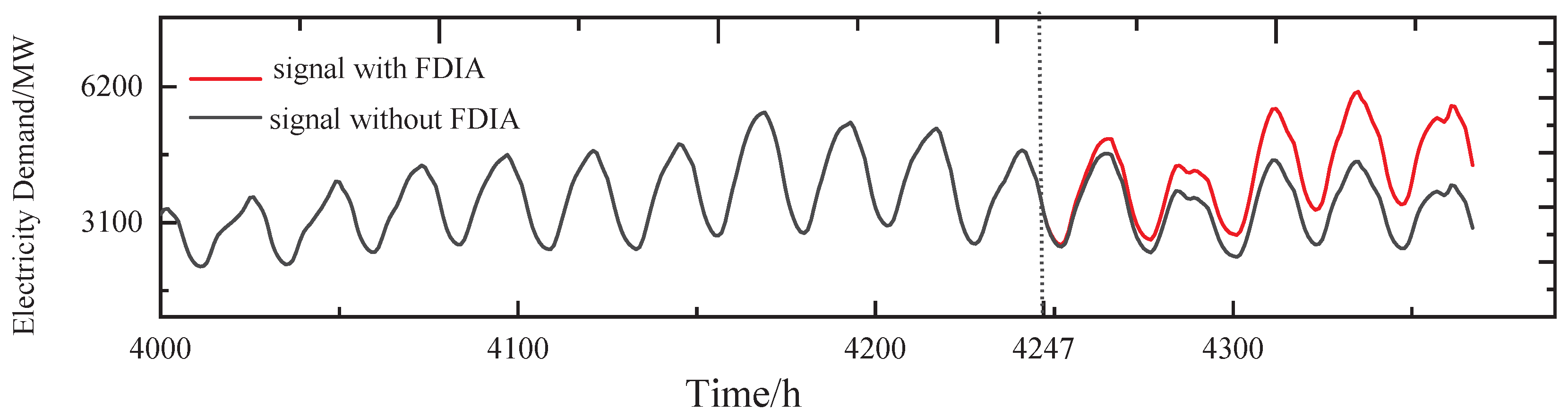
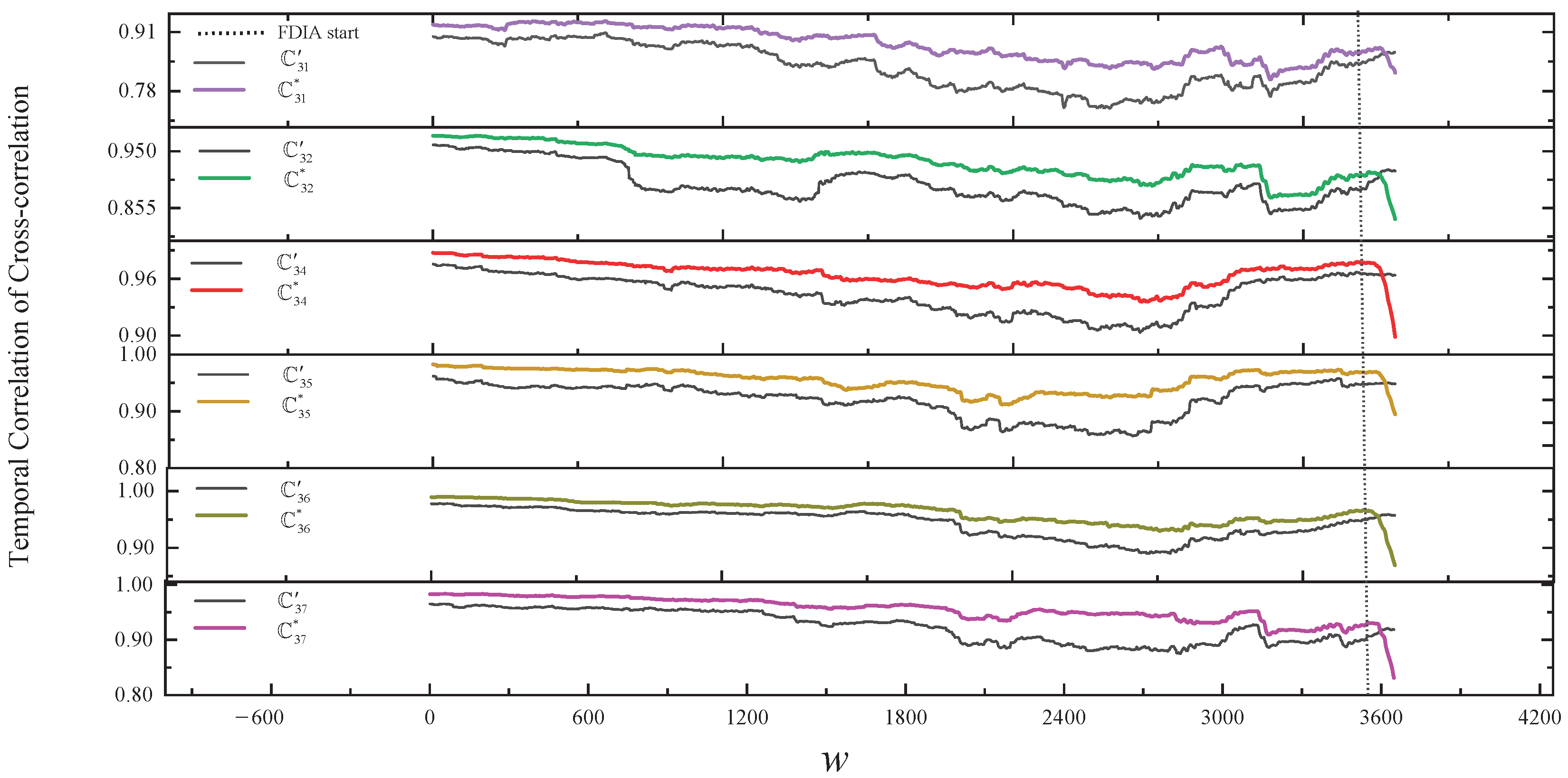
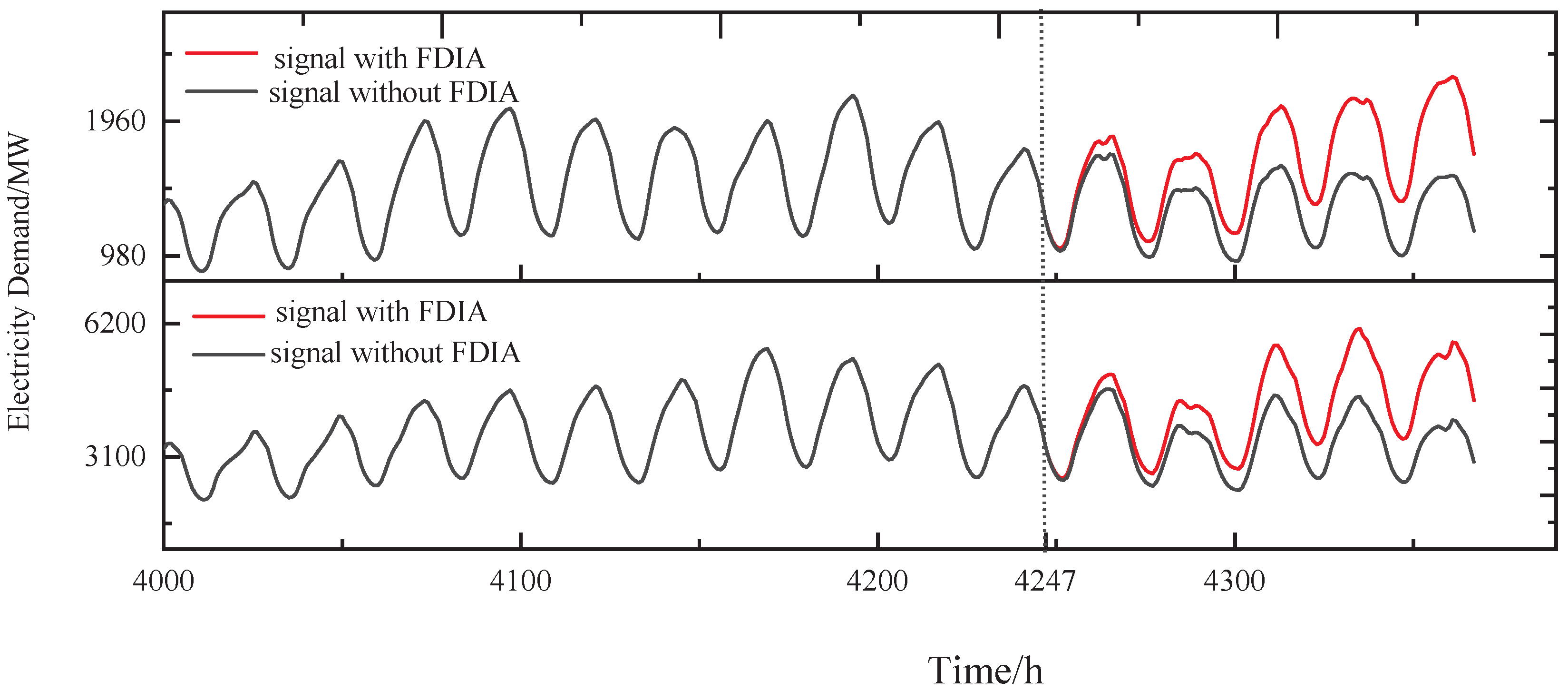
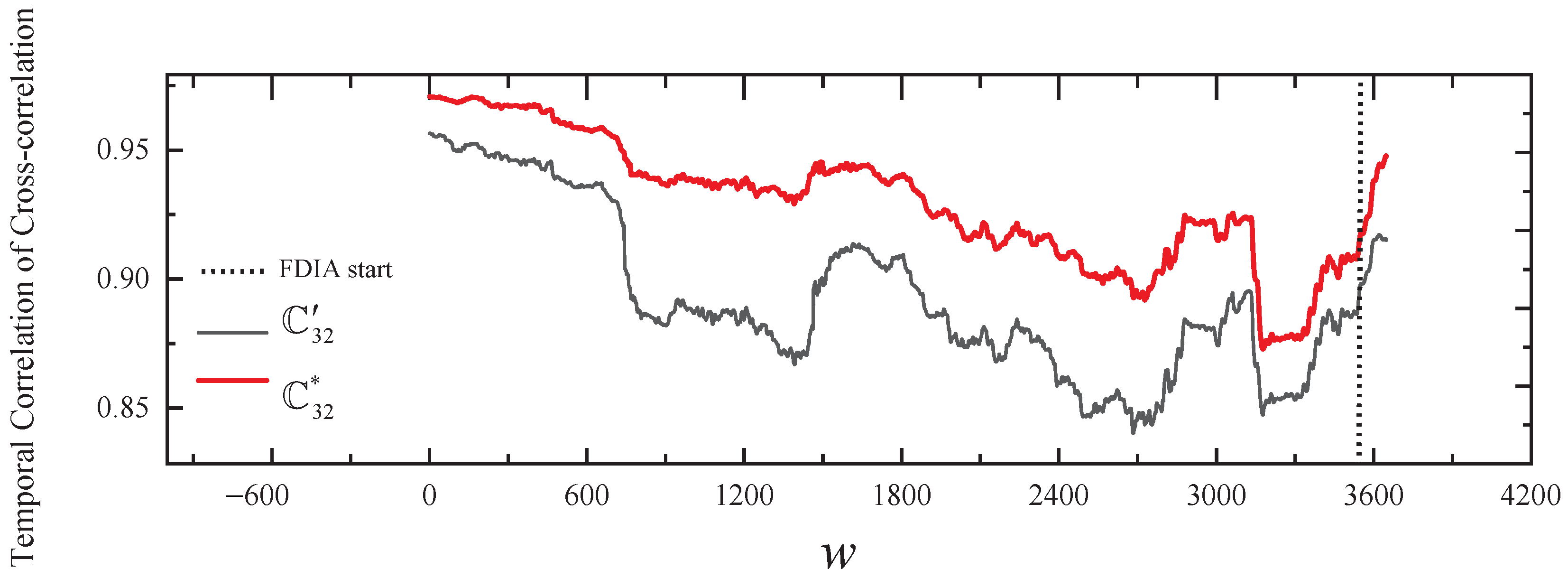
5.2.2. The Stealthy FDIA
6. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Forster, A. Introduction to Wireless Sensor Networks; Wiley-IEEE Press: Hoboken, NJ, USA, 2016. [Google Scholar]
- El Emary, I.M.M.; Ramakrishnan, S. (Eds.) Wireless Sensor Networks: From Theory to Applications; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Faquih, A.; Kadam, P.; Saquib, Z. Cryptographic techniques for wireless sensor networks: A survey. In Proceedings of the 2015 IEEE Bombay Section Symposium (IBSS), Mumbai, India, 10–11 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Oreku, G.S.; Pazynyuk, T. Security in Wireless Sensor Networks; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Rani, A.; Kumar, S. A survey of security in wireless sensor networks. In Proceedings of the 3rd International Conference on CICT, Ghaziabad, India, 9–10 February 2017; pp. 1–5. [Google Scholar]
- Ahmed, M.; Pathan, A.-S.K. False data injection attack (FDIA): An overview and new metrics for fair evaluation of its countermeasure. Complex Adapt. Syst. Model. 2020, 8, 4. [Google Scholar] [CrossRef]
- Illiano, V.P.; Lupu, E.C. Detecting malicious data injections in wireless sensor networks: A survey. ACM Comput. Surv. (CSUR) 2015, 48, 1–33. [Google Scholar] [CrossRef]
- Urbina, D.I.; Urbina, D.I.; Giraldo, J.; Cardenas, A.A.; Valente, J.; Faisal, M.; Tippenhauer, N.O.; Ruths, J.; Candell, R.; Sandberg, H. Survey and New Directions for Physics-Based Attack Detection in Control Systems; National Institute of Standards and Technology, US Department of Commerce: Gaithersburg, MD, USA, 2016.
- Liu, Y.; Cheng, L. Relentless false data injection attacks against Kalman-filter-based detection in smart grid. IEEE Trans. Control Netw. Syst. 2022, 9, 1238–1250. [Google Scholar] [CrossRef]
- Hegazy, H.I.; Tag Eldien, A.S.; Tantawy, M.M.; Fouda, M.M.; TagElDien, H.A. Real-time locational detection of stealthy false data injection attack in smart grid: Using multivariate-based multi-label classification approach. Energies 2022, 15, 5312. [Google Scholar] [CrossRef]
- Gu, Y.; Yu, X.; Guo, K.; Qiao, J.; Guo, L. Detection, estimation, and compensation of false data injection attack for UAVs. Inf. Sci. 2021, 546, 723–741. [Google Scholar] [CrossRef]
- Moazeni, F.; Khazaei, J. Formulating false data injection cyberattacks on pumps’ flow rate resulting in cascading failures in smart water systems. Sustain. Cities Soc. 2021, 75, 103370. [Google Scholar] [CrossRef]
- Ren, X.X.; Yang, G.H. Adaptive control for nonlinear cyber-physical systems under false data injection attacks through sensor networks. Int. J. Robust Nonlinear Control 2020, 30, 65–79. [Google Scholar] [CrossRef]
- Padhan, S.; Turuk, A.K. Design of false data injection attacks in cyber-physical systems. Inf. Sci. 2022, 608, 825–843. [Google Scholar] [CrossRef]
- Miao, B.; Wang, H.; Liu, Y.-J.; Liu, L. Adaptive security control against false data injection attacks in cyber-physical systems. IEEE J. Emerg. Sel. Top. Circuits Syst. 2023. [Google Scholar] [CrossRef]
- Illiano, V.P.; Steiner, R.V.; Lupu, E.C. Unity is strength! Combining attestation and measurements inspection to handle malicious data injections in WSNs. In Proceedings of the 10th ACM Conference on Security and Privacy in Wireless and Mobile Networks, Boston, MA, USA, 18–20 July 2017; pp. 134–144. [Google Scholar]
- Aboelwafa, M.M.; Seddik, K.G.; Eldefrawy, M.H.; Gadallah, Y.; Gidlund, M. A machine-learning-based technique for false data injection attacks detection in industrial IoT. IEEE Internet Things J. 2020, 7, 8462–8471. [Google Scholar] [CrossRef]
- Martovytskyi, V.; Ruban, I.; Lahutin, H.; Ilina, I.; Rykun, V.; Diachenko, V. Method of detecting FDI attacks on smart grid. In Proceedings of the 2020 IEEE International Conference on Problems of Infocommunications. Science and Technology (PIC S&T), Kharkiv, Ukraine, 6–9 October 2020; pp. 132–136. [Google Scholar]
- Berjab, N.; Le, H.H.; Yokota, H. A spatiotemporal and multivariate attribute correlation extraction scheme for detecting abnormal nodes in WSNs. IEEE Access 2021, 9, 135266–135284. [Google Scholar] [CrossRef]
- Huang, D.-W.; Liu, W.; Bi, J. Data tampering attacks diagnosis in dynamic wireless sensor networks. Comput. Commun. 2021, 172, 84–92. [Google Scholar] [CrossRef]
- Hu, J.; Yang, X.; Yang, L. A novel diagnosis scheme against collusive false data injection attack. Sensors 2023, 23, 5943. [Google Scholar] [CrossRef]
- Chen, P.-Y.; Yang, S.; McCann, J.A. Distributed real-time anomaly detection in networked industrial sensing systems. IEEE Trans. Ind. Electron. 2015, 62, 3832–3842. [Google Scholar] [CrossRef]
- Islam, J.; Talusan, J.P.; Bhattacharjee, S.; Tiausas, F.; Vazirizade, S.M.; Dubey, A.; Yasumoto, K.; Das, S.K. Anomaly based incident detection in large scale smart transportation systems. In Proceedings of the 2022 ACM/IEEE 13th International Conference on Cyber-Physical Systems (ICCPS), Milano, Italy, 4–6 May 2022; pp. 215–224. [Google Scholar]
- Lai, Y.; Tong, L.; Liu, J.; Wang, Y.; Tang, T.; Zhao, Z.; Qin, H. Identifying malicious nodes in wireless sensor networks based on correlation detection. Comput. Secur. 2022, 113, 102540. [Google Scholar] [CrossRef]
- Hamilton, J.D. Time Series Analysis; Princeton University Press: Princeton, NJ, USA, 2020. [Google Scholar]
- Rassam, M.A.; Zainal, A.; Maarof, M.A. Advancements of data anomaly detection research in wireless sensor networks: A survey and open issues. Sensors 2013, 13, 10087–10122. [Google Scholar] [CrossRef]
- Shiavi, R. Introduction to Applied Statistical Signal Analysis: Guide to Biomedical and Electrical Engineering Applications; Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Shi, W.; Cao, J.; Zhang, Q.; Li, Y.; Xu, L. Edge computing: Vision and challenges. IEEE Internet Things J. 2016, 3, 637–646. [Google Scholar] [CrossRef]
- Choi, B. ARMA Model Identification; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Mushtaq, R. Augmented Dickey Fuller Test; SSRN-Elsevier: Rochester, NY, USA, 2011. [Google Scholar]
- Chan-Tin, E.; Feldman, D.; Hopper, N.; Kim, Y. The frog-boiling attack: Limitations of anomaly detection for secure network coordinate systems. In Proceedings of the Security and Privacy in Communication Networks: 5th International ICST Conference (SecureComm 2009), Athens, Greece, 14–18 September 2009; Revised Selected Papers 5, 2009. pp. 448–458. [Google Scholar]
- Hao, W.; Yao, P.; Yang, T.; Yang, Q. Industrial cyber–physical system defense resource allocation using distributed anomaly detection. IEEE Internet Things J. 2021, 9, 22304–22314. [Google Scholar] [CrossRef]
- Sun, H.; Yang, X.; Yang, L.-X.; Huang, K.; Li, G. Impulsive artificial defense against advanced persistent threat. IEEE Trans. Inf. Forensics Secur. 2023, 18, 3506–3516. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Q.; Pan, Z.; Pang, G. APT attack detection algorithm based on spatio-temporal association analysis in industrial network. J. Ambient. Intell. Humaniz. Comput. 2020, 1–10. [Google Scholar] [CrossRef]
- Yang, L.-X.; Huang, K.; Yang, X.; Zhang, Y.; Xiang, Y.; Tang, Y.Y. Defense against advanced persistent threat through data backup and recovery. IEEE Trans. Netw. Sci. Eng. 2020, 8, 2001–2013. [Google Scholar] [CrossRef]
- Cao, Y.; Jiang, H.; Deng, Y.; Wu, J.; Zhou, P.; Luo, W. Detecting and mitigating ddos attacks in SDN using spatial-temporal graph convolutional network. IEEE Trans. Dependable Secur. Comput. 2021, 19, 3855–3872. [Google Scholar] [CrossRef]
- Khan, M.A.; Nasralla, M.M.; Umar, M.M.; Khan, S.; Choudhury, N. An efficient multilevel probabilistic model for abnormal traffic detection in wireless sensor networks. Sensors 2022, 22, 410. [Google Scholar] [CrossRef]
- Akrami, A.; Mohsenian-Rad, H. Event-Triggered Distribution System State Estimation: Sparse Kalman Filtering with Reinforced Coupling. IEEE Trans. Smart Grid 2023, 15, 627–640. [Google Scholar] [CrossRef]
- Ponnarasi, L.; Pankajavalli, P.; Lim, Y.; Sakthivel, R. Optimization Based Event-Triggered State Estimation Algorithm for IoT-Based Wind Turbine Systems. IEEE Internet Things J. 2023. early access. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Works | FDIA Detection Methods | FDIA Types | |||
|---|---|---|---|---|---|
| General Detection | Distributed Detection | Simple FDIAs | Collusive FDIAs | Stealthy FDIAs | |
| Illiano et al. [16] | yes | no | yes | yes | no |
| Aboelwafa et al. [17] | yes | no | yes | no | no |
| Martovytskyi et al. [18] | yes | no | yes | no | no |
| Berjab et al. [19] | yes | no | yes | no | no |
| Huang et al. [20] | yes | no | yes | no | no |
| Hu et al. [21] | yes | no | yes | yes | no |
| Chen et al. [22] | yes | yes | yes | no | no |
| Islam et al. [23] | yes | yes | yes | no | no |
| Lai et al. [24] | yes | yes | yes | no | no |
| Our approach | yes | yes | yes | yes | yes |
| Parameters | Value |
|---|---|
| The HTSs’ size T | 4246 h |
| The ETSs’ size S | 120 h |
| Sliding window size k | 720 h |
| Threshold | 0 |
| Fdia Type | ||||||
|---|---|---|---|---|---|---|
| Simple FDIA | −0.18 | 0.15 | 0.10 | −0.48 | −0.66 | −0.44 |
| Stealthy FDIA | −0.60 | −0.67 | 0.03 | −0.21 | −0.79 | −0.71 |
| Stealthy and collusive FDIA | −0.60 | 0.98 | 0.03 | −0.21 | −0.79 | −0.71 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, J.; Yang, X.; Yang, L.-X. A Framework for Detecting False Data Injection Attacks in Large-Scale Wireless Sensor Networks. Sensors 2024, 24, 1643. https://doi.org/10.3390/s24051643
Hu J, Yang X, Yang L-X. A Framework for Detecting False Data Injection Attacks in Large-Scale Wireless Sensor Networks. Sensors. 2024; 24(5):1643. https://doi.org/10.3390/s24051643
Chicago/Turabian StyleHu, Jiamin, Xiaofan Yang, and Lu-Xing Yang. 2024. "A Framework for Detecting False Data Injection Attacks in Large-Scale Wireless Sensor Networks" Sensors 24, no. 5: 1643. https://doi.org/10.3390/s24051643
APA StyleHu, J., Yang, X., & Yang, L.-X. (2024). A Framework for Detecting False Data Injection Attacks in Large-Scale Wireless Sensor Networks. Sensors, 24(5), 1643. https://doi.org/10.3390/s24051643