Polar Motion Ultra-Short-Term Prediction of Least-Squares+Multivariate Autoregressive Hybrid Method by Using the Kalman Filter

Abstract
1. Introduction
2. Materials and Methods
2.1. Least-Squares
2.2. AR Model
2.3. MAR Model
2.4. Kalman Filter
2.5. AR Model Estimated by Using Kalman Filter
2.6. MAR Model Estimated by Using Kalman Filter
2.7. Predicted Error Analysis
3. Results
3.1. Data Description
3.2. Experiments
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bradley, B.K.; Sibois, A.; Axelrad, P. Influence of ITRS/GCRS implementation for astrodynamics: Coordinate transformations. Adv. Space Res. 2016, 57, 850–866. [Google Scholar] [CrossRef]
- Dickey, J.O.; Newhall, X.X.; Williams, J.G. Earth orientation from lunar laser ranging and an error analysis of polar motion services. J. Geophys. Res. Solid Earth 1985, 90, 9353–9362. [Google Scholar] [CrossRef]
- Coulot, D.; Pollet, A.; Collilieux, X.; Berio, P. Global optimization of core station networks for space geodesy: Application to the referencing of the SLR EOP with respect to ITRF. J. Geod. 2009, 84, 31. [Google Scholar] [CrossRef]
- Dow, J.M.; Neilan, R.E.; Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Byram, S.; Hackman, C. High-precision GNSS orbit, clock and EOP estimation at the United States Naval Observatory. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 659–663. [Google Scholar]
- Angermann, D.; Seitz, M.; Drewes, H. Analysis of the DORIS contributions to ITRF2008. Adv. Space Res. 2010, 46, 1633–1647. [Google Scholar] [CrossRef]
- Schuh, H.; Schmitz-Hübsch, H. Short Period Variations in Earth Rotation as Seen By VLBI. Surv. Geophys. 2000, 21, 499–520. [Google Scholar] [CrossRef]
- Nilsson, T.; Heinkelmann, R.; Karbon, M.; Raposo-Pulido, V.; Soja, B.; Schuh, H. Earth orientation parameters estimated from VLBI during the CONT11 campaign. J. Geod. 2014, 88, 491–502. [Google Scholar] [CrossRef]
- Bizouard, C.; Lambert, S.; Gattano, C.; Becker, O.; Richard, J.-Y. The IERS EOP 14C04 solution for Earth orientation parameters consistent with ITRF 2014. J. Geod. 2019, 93, 621–633. [Google Scholar] [CrossRef]
- Morabito, D.D.; Eubanks, T.M.; Steppe, J.A. Kalman filtering of Earth orientation changes. Symp. Int. Astron. Union 1988, 128, 257–267. [Google Scholar] [CrossRef]
- Włodzimierz, H. Polar Motion Prediction by the Least-Squares Collocation Method. In Proceedings of the Earth Rotation and Coordinate Reference Frames, New York, NY, USA, 10–11 August 1990; pp. 50–57. [Google Scholar]
- Freedman, A.P.; Steppe, J.A.; Dickey, J.O.; Eubanks, T.M.; Sung, L.Y. The short-term prediction of universal time and length of day using atmospheric angular momentum. J. Geophys. Res. Solid Earth 1994, 99, 6981–6996. [Google Scholar] [CrossRef]
- Kosek, W.; McCarthy, D.D.; Luzum, B.J. Possible improvement of Earth orientation forecast using autocovariance prediction procedures. J. Geod. 1998, 72, 189–199. [Google Scholar] [CrossRef]
- Ye, F.; Yuan, Y. A modified stochastic model for LS+AR hybrid method and its application in polar motion short-term prediction. Geod. Geodyn. 2023, 15, 100–105. [Google Scholar] [CrossRef]
- Wang, L.; Miao, W.; Wu, F. A new medium-long term polar motion prediction method based on sliding average within difference series. Meas. Sci. Technol. 2023, 34, 105023. [Google Scholar] [CrossRef]
- Wang, L.; Miao, W.; Wu, F. A new polar motion prediction method combined with the difference between polar motion series. Geod. Geodyn. 2022, 13, 564–572. [Google Scholar] [CrossRef]
- Ye, F.; Yuan, Y.; Deng, Z. Improved Ultra-Rapid UT1-UTC Determination and Its Preliminary Impact on GNSS Satellite Ultra-Rapid Orbit Determination. Remote Sens. 2020, 12, 3584. [Google Scholar] [CrossRef]
- Akulenko, L.D.; Kumakshev, S.A.; Markov, Y.G.; Rykhlova, L.V. Forecasting the polar motions of the deformable Earth. Astron. Rep. 2002, 46, 858–865. [Google Scholar] [CrossRef]
- Schuh, H.; Ulrich, M.; Egger, D.; Müller, J.; Schwegmann, W. Prediction of Earth orientation parameters by artificial neural networks. J. Geod. 2002, 76, 247–258. [Google Scholar] [CrossRef]
- Akyilmaz, O.; Kutterer, H. Prediction of Earth rotation parameters by fuzzy inference systems. J. Geod. 2004, 78, 82–93. [Google Scholar] [CrossRef]
- Chin, T.M.; Gross, R.S.; Dickey, J.O. Modeling and forecast of the polar motion excitation functions for short-term polar motion prediction. J. Geod. 2004, 78, 343–353. [Google Scholar] [CrossRef]
- Niedzielski, T.; Kosek, W. Prediction of UT1–UTC, LOD and AAM χ3 by combination of least-squares and multivariate stochastic methods. J. Geod. 2008, 82, 83–92. [Google Scholar] [CrossRef]
- Ye, F.; Yuan, Y. Improved LS+MAR hybrid method to UT1-UTC ultra-short-term prediction by using first-order-difference UT1-UTC. Geod. Geodyn. 2024, 14, 379–385. [Google Scholar] [CrossRef]
- Xu, X.Q.; Zhou, Y.H.; Liao, X.H. Short-term earth orientation parameters predictions by combination of the least-squares, AR model and Kalman filter. J. Geodyn. 2012, 62, 83–86. [Google Scholar] [CrossRef]
- Shen, Y.; Guo, J.; Liu, X.; Kong, Q.; Guo, L.; Li, W. Long-term prediction of polar motion using a combined SSA and ARMA model. J. Geod. 2018, 92, 333–343. [Google Scholar] [CrossRef]
- Modiri, S.; Belda, S.; Heinkelmann, R.; Hoseini, M.; Ferrándiz, J.M.; Schuh, H. Polar motion prediction using the combination of SSA and Copula-based analysis. Earth Planets Space 2018, 70, 115. [Google Scholar] [CrossRef]
- Modiri, S.; Belda, S.; Hoseini, M.; Heinkelmann, R.; Ferrándiz, J.M.; Schuh, H. A new hybrid method to improve the ultra-short-term prediction of LOD. J. Geod. 2020, 94, 23. [Google Scholar] [CrossRef] [PubMed]
- Kalarus, M.; Schuh, H.; Kosek, W.; Akyilmaz, O.; Bizouard, C.; Gambis, D.; Gross, R.; Jovanović, B.; Kumakshev, S.; Kutterer, H.; et al. Achievements of the Earth orientation parameters prediction comparison campaign. J. Geod. 2010, 84, 587–596. [Google Scholar] [CrossRef]
- Shumate, N.A.; Luzum, B.J.; Kosek, W. Earth Orientation Parameters Combination of Prediction Pilot Project. In Proceedings of the Agu Fall Meeting 2013, San Fransisco, CA, USA, 9–13 December 2013; p. G13A–0928. [Google Scholar]
- Beutler, G.; Pearlman, M.; Plag, H.; Neilan, R.; Rothacher, M.; Rummel, R. Meeting the Requirements of a Global Society on a Changing Planet in 2020. In Global Geodetic Observing System; Springer: Berlin/Heidelberg, Germany, 2009; pp. 273–281. [Google Scholar]
- Kosek, W. Future Improvements in EOP Prediction. In Geodesy for Planet Earth, Proceedings of the 2009 IAG Symposium, Buenos Aires, Argentina, 31 August–4 September 2009; Springer: Berlin/Heidelberg, Germany, 2012; pp. 513–520. [Google Scholar]
- Schwarz, G. Estimating the dimension of a model. Ann. Stat. 1978, 6, 461–464. [Google Scholar] [CrossRef]
- Hung, L.S.; Anderson, B. Design of Kalman filters using signal-model output statistics. Proc. Inst. Electr. Eng. 1973, 120, 312–318. [Google Scholar]
- Dhar, S.; Heinkelmann, R.; Belda, S.; Modiri, S.; Schuh, H.; Guessoum, S.; Ferrándiz, J.M.; Balasubramanian, N.; Dikshit, O. Combining evolutionary computation with machine learning technique for improved short-term prediction of UT1-UTC and length-of-day. Earth Planets Space 2024, 76, 111. [Google Scholar] [CrossRef]

{kind=link}
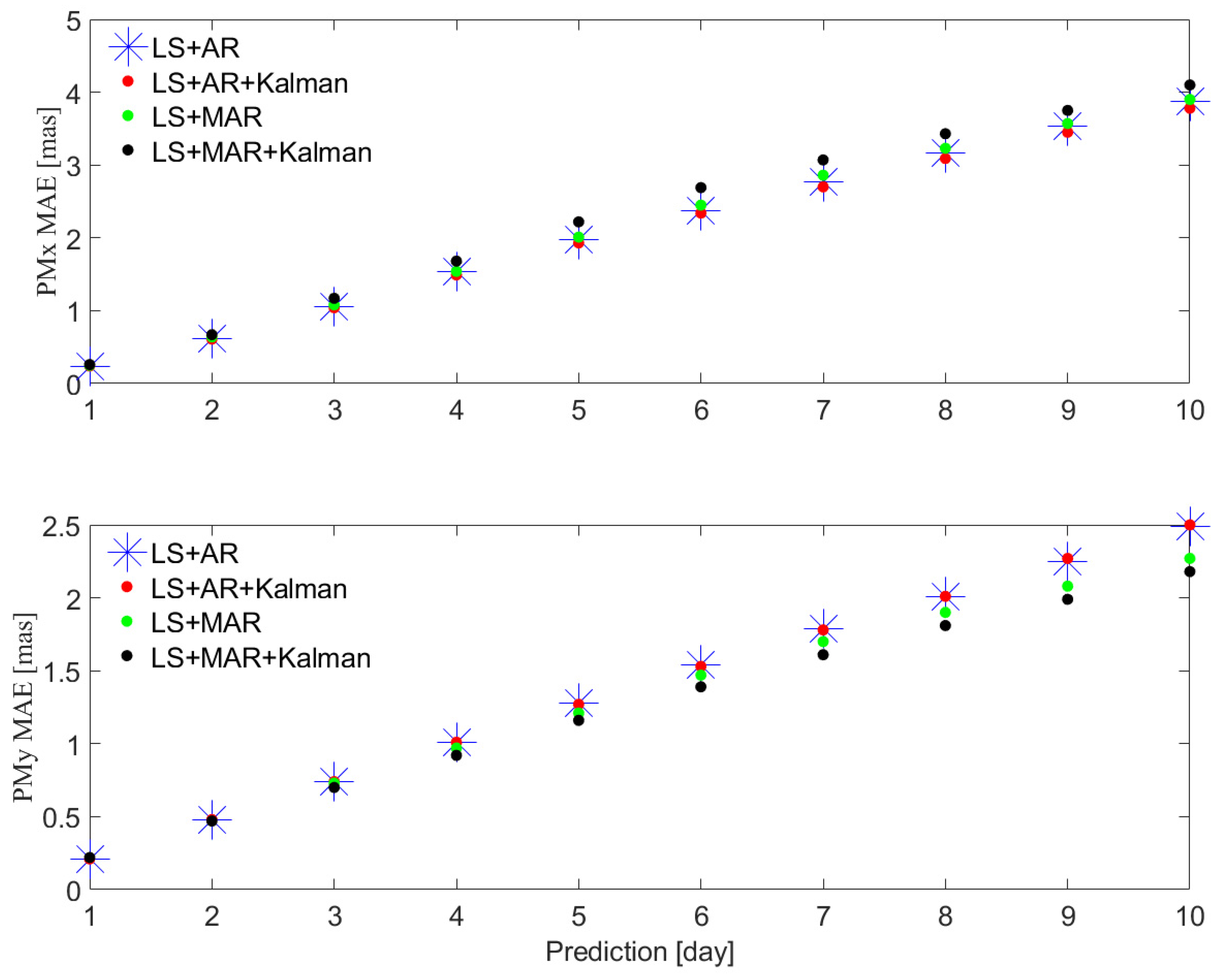
| Prediction Day/Cases | LS+AR | LS+AR+Kalman | LS+MAR | LS+MAR+Kalman | LS+AR | LS+AR+Kalman | LS+MAR | LS+MAR+Kalman |
|---|---|---|---|---|---|---|---|---|
| PMx | PMy | PMx | PMy | PMx | PMy | PMx | PMy | |
| 1 | 0.24 | 0.21 | 0.24 | 0.21 | 0.25 | 0.22 | 0.26 | 0.22 |
| 2 | 0.62 | 0.48 | 0.61 | 0.48 | 0.64 | 0.47 | 0.67 | 0.47 |
| 3 | 1.06 | 0.74 | 1.04 | 0.74 | 1.08 | 0.73 | 1.17 | 0.70 |
| 4 | 1.53 | 1.01 | 1.49 | 1.01 | 1.54 | 0.97 | 1.68 | 0.92 |
| 5 | 1.97 | 1.28 | 1.93 | 1.27 | 2.01 | 1.21 | 2.22 | 1.16 |
| 6 | 2.37 | 1.54 | 2.34 | 1.53 | 2.45 | 1.47 | 2.69 | 1.39 |
| 7 | 2.77 | 1.79 | 2.70 | 1.78 | 2.86 | 1.70 | 3.07 | 1.61 |
| 8 | 3.16 | 2.01 | 3.09 | 2.01 | 3.23 | 1.90 | 3.43 | 1.81 |
| 9 | 3.53 | 2.25 | 3.45 | 2.27 | 3.57 | 2.08 | 3.75 | 1.99 |
| 10 | 3.87 | 2.49 | 3.78 | 2.50 | 3.90 | 2.27 | 4.10 | 2.18 |
| Average value | 2.11 | 1.38 | 2.07 | 1.38 | 2.15 | 1.30 | 2.30 | 1.24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, Z.; Ye, F.; Hua, L. Polar Motion Ultra-Short-Term Prediction of Least-Squares+Multivariate Autoregressive Hybrid Method by Using the Kalman Filter. Sensors 2024, 24, 6260. https://doi.org/10.3390/s24196260
Tan Z, Ye F, Hua L. Polar Motion Ultra-Short-Term Prediction of Least-Squares+Multivariate Autoregressive Hybrid Method by Using the Kalman Filter. Sensors. 2024; 24(19):6260. https://doi.org/10.3390/s24196260
Chicago/Turabian StyleTan, Zhirong, Fei Ye, and Liangchun Hua. 2024. "Polar Motion Ultra-Short-Term Prediction of Least-Squares+Multivariate Autoregressive Hybrid Method by Using the Kalman Filter" Sensors 24, no. 19: 6260. https://doi.org/10.3390/s24196260
APA StyleTan, Z., Ye, F., & Hua, L. (2024). Polar Motion Ultra-Short-Term Prediction of Least-Squares+Multivariate Autoregressive Hybrid Method by Using the Kalman Filter. Sensors, 24(19), 6260. https://doi.org/10.3390/s24196260