
A Deep Learning Approach to Distance Map Generation Applied to Automatic Fiber Diameter Computation from Digital Micrographs



Abstract
1. Introduction
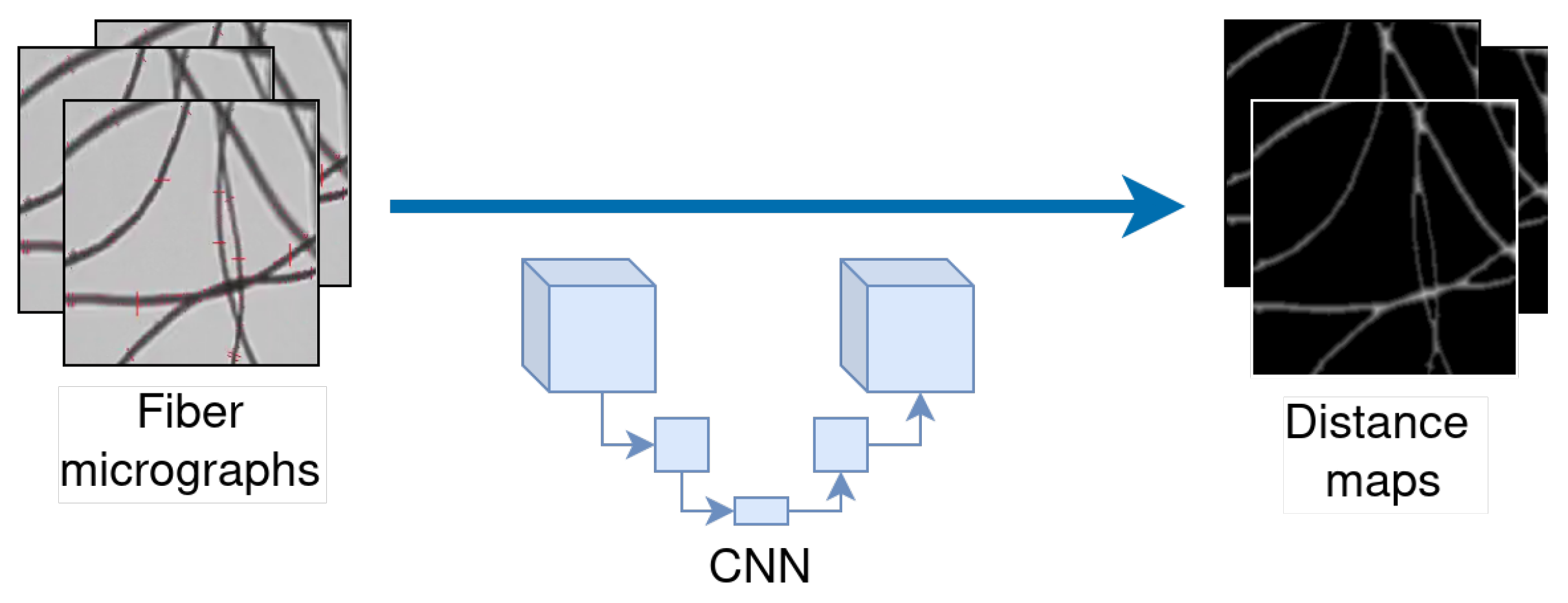
- We describe our approach to distance map generation using deep neural network models (which is the first such work to the best of our knowledge).
- To facilitate the model training, we used sets of real and simulated fiber micrographs, because it is possible to obtain synthetic and realistic digital micrographs.
- To optimize network learning, three different loss functions are used.
- We introduce an experimental protocol designed for future reference, ensuring transparent and equitable comparisons.
2. Related Work
3. Materials and Methods
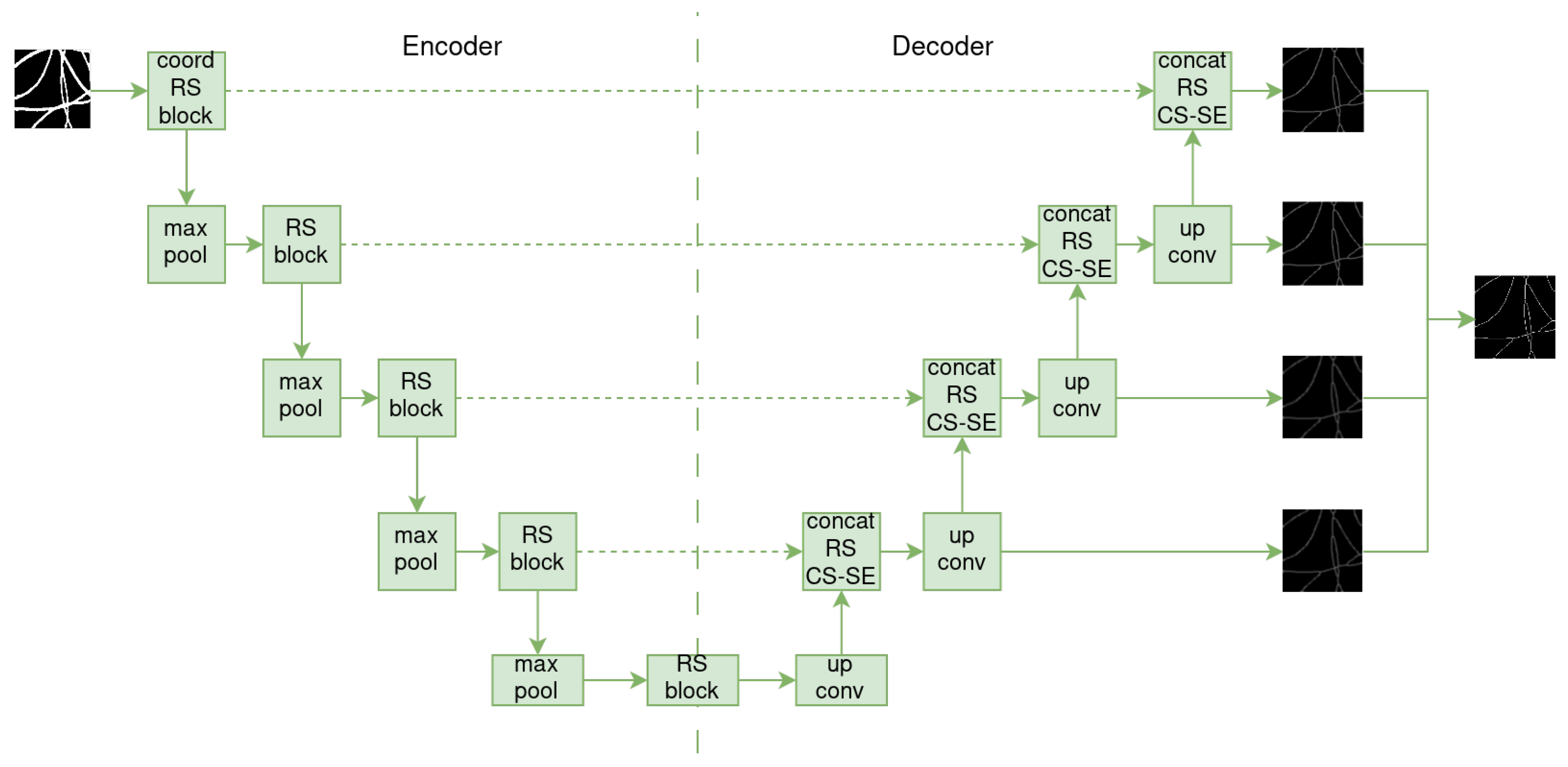
3.1. Overall Network Architecture
3.2. CNN Base Architectures
3.3. CNN Framework
3.4. Loss Function
3.5. Distance Map Label
3.6. Datasets
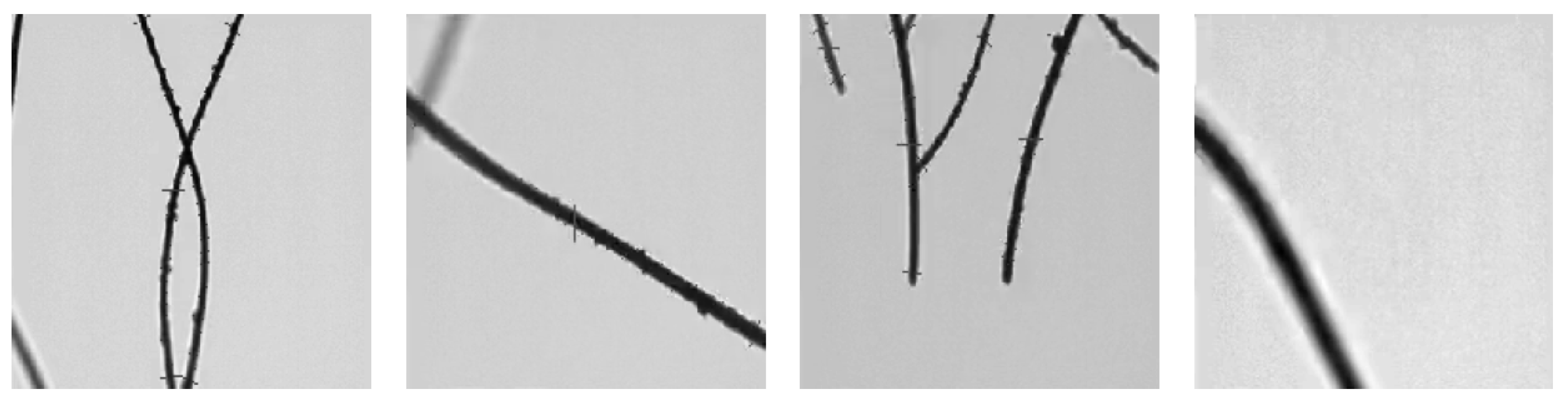
3.6.1. Real Micrographs
3.6.2. Synthetic Micrographs
4. Experimental Results
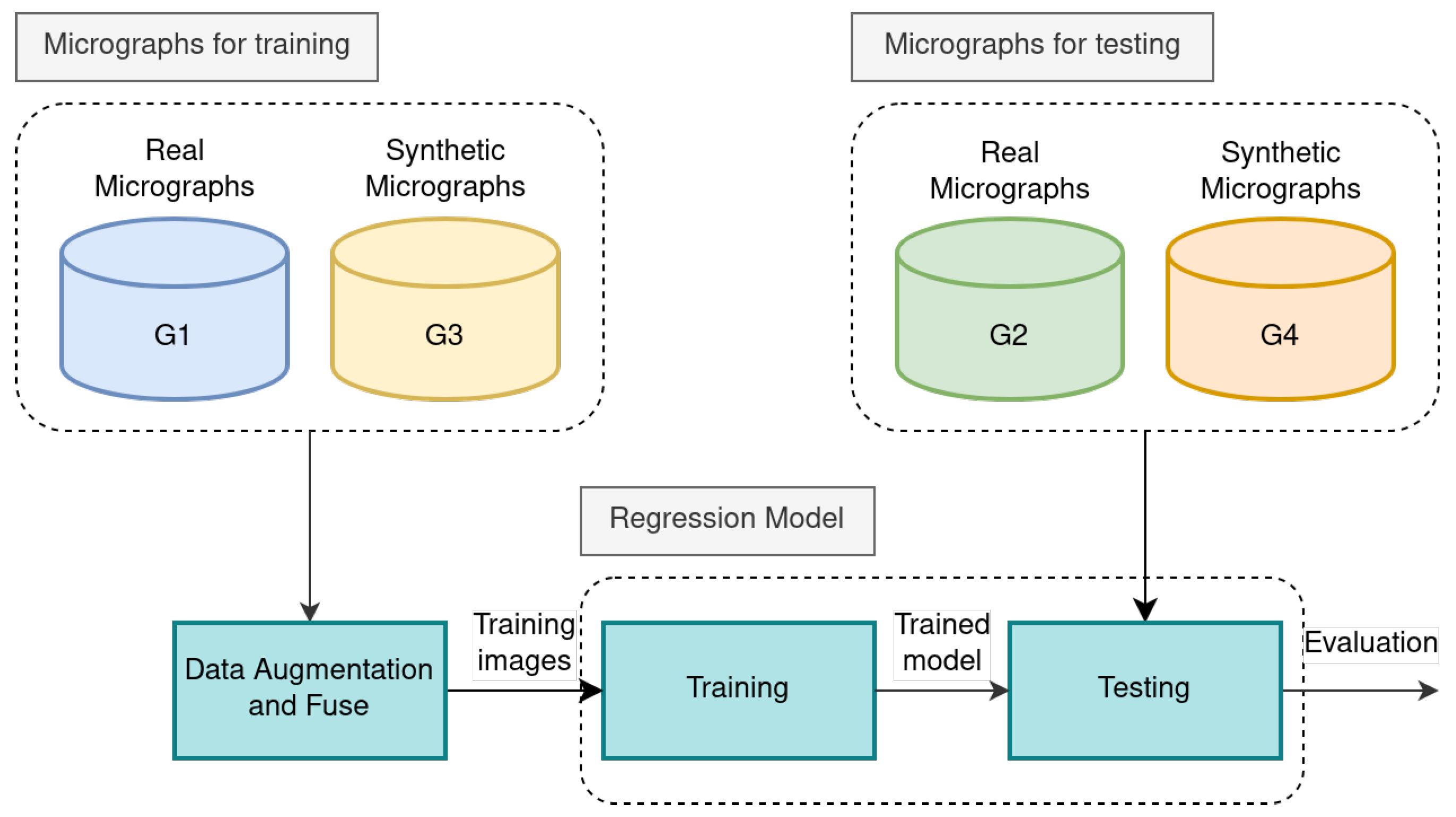
4.1. Evaluation Protocol
- The micrographs from the first and third groups (G1 and G3) are used for training and cross-validation.
- The second and fourth groups (G2 and G4) are used for testing.
4.2. Experiments
4.3. Implementation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4.4. Computational Time
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CNN | Convolutional Neural Network |
| MAE | Mean Absolute Error |
| MSE | Mean Squared Error |
| OFDA | Optical Fibre Diameter Analyzer |
References
- Schmid, S. The Value Chain of Alpaca Fiber in Peru, an Economic Analysis. Master’s Thesis, Institut für Agrarwirtschaft ETH Zurich, Zurich, Switzerland, 2006; p. 154. [Google Scholar]
- Baxter, B.P.; Brims, M.A.; Taylor, T.B. Description and performance of the optical fibre diameter analyser (OFDA). J. Text. Inst. 1992, 83, 507–526. [Google Scholar] [CrossRef]
- Vicugna Pacos. Vicugna Pacos—Wikipedia. 2021. Available online: https://es.wikipedia.org/wiki/Vicugna_pacos (accessed on 12 October 2021).
- New Zealand Wool Testing Authority Ltd. (NZWTA). Fibre Fineness; New Zealand Wool Testing Authority Ltd. (NZWTA): Napier, New Zealand, 2021. [Google Scholar]
- Sommerville, P. Technologies for measuring the fineness of wool fibres, part. In Fundamental Principles of Fibre Fineness Measurement; Australian Wool Testing Authority Ltd.: Kensington, VIC, Australia, 2002; Volume 3, pp. 1–5. [Google Scholar]
- Qi, K.; Lupton, C.J.; Pfeiffer, F.A.; Minikhiem, D.L. Evaluation of the optical fibre diameter analyser (OFDA) for measuring fiber diameter parameters of sheep and goats. J. Anim. Sci. 1994, 72, 1675–1679. [Google Scholar] [CrossRef]
- Quispe, M.D.; Benavidez, G.; Sauri, R.A.; Bengoechea, J.J.; Quispe, E.C. Development and preliminary validation of an automatic digital analysis system for animal fibre analysis. S. Afr. J. Anim. Sci. 2017, 47, 822–833. [Google Scholar] [CrossRef]
- FibreLux. About the FibreLux Micron Meter. Available online: https://fibrelux.co.za/about-the-fibrelux-micron-meter/ (accessed on 13 June 2024).
- Calderón Antezana, D.W.; Gutiérrez, G.; Quispe Peña, E.C. Comparación de precisión y exactitud de cuatro equipos para determinar la calidad de fibra de alpaca. In Proceedings of the VIII Congreso Mundial Sobre Camélidos, Oruro, Bolivia, 21–23 November 2018. [Google Scholar]
- Ziabari, M.; Mottaghitalab, V.; Haghi, A.K. Distance transform algorithm for measuring nanofiber diameter. Korean J. Chem. Eng. 2008, 25, 905–918. [Google Scholar] [CrossRef]
- Naylor, P.; Laé, M.; Reyal, F.; Walter, T. Segmentation of Nuclei in Histopathology Images by Deep Regression of the Distance Map. IEEE Trans. Med. Imaging 2019, 38, 448–459. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Lin, Z.; Jiao, Y.; Chan, M.T.; Huang, S.; Wang, L. Two-stage segmentation framework based on distance transformation. Sensors 2021, 22, 250. [Google Scholar] [CrossRef] [PubMed]
- Elizondo-Leal, J.C.; Ramirez-Torres, J.G.; Barrón-Zambrano, J.H.; Diaz-Manríquez, A.; Nuño-Maganda, M.A.; Saldivar-Alonso, V.P. Parallel raster scan for Euclidean distance transform. Symmetry 2020, 12, 1808. [Google Scholar] [CrossRef]
- Baltuano, O.; Rojas, J.; Aching, J.; Rojas, D.; Comina, G.; Díaz, J.; Cifuentes, E.; Cunya, E.; Gago, J.; Solis, J.; et al. Prototipo de fibrómetro digital computarizado para medición automática del espesor de fibra de alpaca. In Informe Científico Tecnológico; Instituto Peruano de Energía Nuclear: Lima, Peru, 2005; pp. 105–113. [Google Scholar]
- Pourdeyhimi, B.; Dent, R. Measuring Fiber Diameter Distribution in Nonwovens. Text. Res. J. 1999, 69, 233–236. [Google Scholar] [CrossRef]
- Saavedra, D.; Banerjee, S.; Mery, D. Detection of threat objects in baggage inspection with X-ray images using deep learning. Neural Comput. Appl. 2021, 33, 7803–7819. [Google Scholar] [CrossRef]
- Liang, D.; Xu, W.; Zhu, Y.; Zhou, Y. Focal Inverse Distance Transform Maps for Crowd Localization. IEEE Trans. Multimed. 2022, 25, 6040–6052. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015, Proceedings of the 18th International Conference, Munich, Germany, 5–9 October 2015; Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Cham, Switzerland, 2015; Volume 9351, pp. 234–241. [Google Scholar] [CrossRef]
- Bonilla, M.Q.; Serrano-Arriezu, L.; Trigo, J.D.; Bonilla, C.Q.; Gutiérrez, A.P.; Peña, E.Q. Application of artificial intelligence and digital images analysis to automatically determine the percentage of fiber medullation in alpaca fleece samples. Small Rumin. Res. 2022, 213, 106724. [Google Scholar] [CrossRef]
- Quispe, M.D.; Quispe, C.C.; Serrano-Arriezu, L.; Trigo, J.D.; Bengoechea, J.J.; Quispe, E.C. Development and validation of a smart system for medullation and diameter assessment of alpaca, llama and mohair fibres. Animal 2023, 17, 100800. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Nathan, S.; Kansal, P. SkeletonNet: Shape pixel to skeleton pixel. In Proceedings of the 2019 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, CA, USA, 16–17 June 2019; pp. 1181–1185. [Google Scholar] [CrossRef]
- Xie, S.; Tu, Z. Holistically-Nested Edge Detection. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1395–1403. [Google Scholar]
- Liu, R.; Lehman, J.; Molino, P.; Petroski Such, F.; Frank, E.; Sergeev, A.; Yosinski, J. An intriguing failing of convolutional neural networks and the coordconv solution. In Proceedings of the 31st International Conference on Neural Information Processing Systems (NeurIPS 2018), Montréal, QC, Canada, 3–8 December 2018. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 7132–7141. [Google Scholar]
- Roy, A.G.; Navab, N.; Wachinger, C. Concurrent spatial and channel ‘squeeze & excitation’ in fully convolutional networks. In Medical Image Computing and Computer Assisted Intervention—MICCAI 2018, Proceedings of the 21st International Conference, Granada, Spain, 16–20 September 2018; Proceedings, Part I; Springer: Cham, Switzerland, 2018; pp. 421–429. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar] [CrossRef]
- Gonzalez, R.; Woods, R. Digital Image Processing; Pearson: London, UK, 2018; pp. 975–977. [Google Scholar]
- Danielsson, P.E. Euclidean distance mapping. Comput. Graph. Image Process. 1980, 14, 227–248. [Google Scholar] [CrossRef]
- Jähne, B. Digital Image Processing; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005; p. 36. [Google Scholar]
- Pourdeyhimi, B.; Ramanathan, R.; Dent, R. Measuring Fiber Orientation in Nonwovens: Part I: Simulation. Text. Res. J. 1996, 66, 713–722. [Google Scholar] [CrossRef]
- Abdel-Ghani, M.; Davies, G. Simulation of non-woven fibre mats and the application to coalescers. Chem. Eng. Sci. 1985, 40, 117–129. [Google Scholar] [CrossRef]
- Taylor, L.; Nitschke, G. Improving Deep Learning using Generic Data Augmentation. In Proceedings of the 2018 IEEE Symposium Series on Computational Intelligence (SSCI), Bangalore, India, 18–21 November 2018. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Milesi, A. Pytorch-UNet. 2021. Available online: https://github.com/milesial/Pytorch-UNet (accessed on 13 June 2024).
- Wen, C. CoordConv. 2021. Available online: https://github.com/walsvid/CoordConv (accessed on 13 June 2024).
- Hataya, R. SENet.pytorch. 2021. Available online: https://github.com/moskomule/senet.pytorch (accessed on 13 June 2024).
- Komatsu, R. OctDPSNet. 2021. Available online: https://github.com/matsuren/octDPSNet (accessed on 13 June 2024).





| Group | Purpose | Database * | Images |
|---|---|---|---|
| G1 | Training | 1 | 43 |
| G2 | Testing | 1 | 11 |
| G3 | Training | 2 | 43 |
| G4 | Testing | 2 | 11 |
| Model | Loss Function | MAE | MSE |
|---|---|---|---|
| U-Net Regression | L1 Loss | 0.1094 | 0.0882 |
| L2 Loss | 0.1319 | 0.0711 | |
| Smooth L1 Loss | 0.1137 | 0.0759 | |
| SkeletonNet Regression | L1 Loss | 0.2041 | 0.2880 |
| L2 Loss | 0.3087 | 0.2473 | |
| Smooth L1 Loss | 0.2592 | 0.2519 |
| Model | Loss Function | MAE | MSE |
|---|---|---|---|
| U-Net Regression | L1 Loss | 0.2268 | 0.1958 |
| L2 Loss | 0.2467 | 0.1229 | |
| Smooth L1 Loss | 0.2139 | 0.1726 | |
| SkeletonNet Regression | L1 Loss | 0.2755 | 0.2717 |
| L2 Loss | 0.3223 | 0.1892 | |
| Smooth L1 Loss | 0.3093 | 0.2851 |
| Model | Time per Image [s] | Images per Second |
|---|---|---|
| U-Net Regression | 0.077 | 12.987 |
| SkeletonNet Regression | 0.094 | 10.638 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alejo Huarachi, A.M.; Beltrán Castañón, C.A. A Deep Learning Approach to Distance Map Generation Applied to Automatic Fiber Diameter Computation from Digital Micrographs. Sensors 2024, 24, 5497. https://doi.org/10.3390/s24175497
Alejo Huarachi AM, Beltrán Castañón CA. A Deep Learning Approach to Distance Map Generation Applied to Automatic Fiber Diameter Computation from Digital Micrographs. Sensors. 2024; 24(17):5497. https://doi.org/10.3390/s24175497
Chicago/Turabian StyleAlejo Huarachi, Alain M., and César A. Beltrán Castañón. 2024. "A Deep Learning Approach to Distance Map Generation Applied to Automatic Fiber Diameter Computation from Digital Micrographs" Sensors 24, no. 17: 5497. https://doi.org/10.3390/s24175497
APA StyleAlejo Huarachi, A. M., & Beltrán Castañón, C. A. (2024). A Deep Learning Approach to Distance Map Generation Applied to Automatic Fiber Diameter Computation from Digital Micrographs. Sensors, 24(17), 5497. https://doi.org/10.3390/s24175497